一种康复减重步行训练车
文献发布时间:2023-06-19 10:44:55
技术领域
本发明涉及一种康复减重步行训练车,属于康复训练设备。
背景技术
下肢在人体运动过程中,主要承担支撑、迈步和平衡三大功能。为了恢复这些功能,目前临床上广泛使用的康复手段是步行训练。在步行训练初期,由于患者下肢不足以支撑自身体重,为了帮助患者实现站立状态,需要使用减重支持系统,这种采用了减重支持系统的步行训练也被称为减重步行训练,减重步行训练是目前公认的最有效的下肢功能恢复疗法。现有技术的减重步行训练多采用减重吊架+跑台的形式对患者实现被动减重步行训练,但训练效果欠佳。
发明内容
发明目的:为了克服现有技术中存在的不足,本发明提供一种康复减重步行训练车(也可称为减重车),通过减重支持帮助下肢运动功能障碍的患者进行步行训练,采用闭环反馈控制保持向患者提供的减重力恒定,具有直线同步跟随功能,能使患者落地并主动发力进行步行训练。
技术方案:为实现上述目的,本发明采用的技术方案为:
一种康复减重步行训练车,包括车身支架、恒定减重系统、行走跟随系统和控制系统;
所述恒定减重系统包括减重驱动装置、滑轮组、减重吊绳和减重马甲,减重吊绳的一端缠绕在减重驱动装置的卷轮上,减重吊绳的另一端绕经安装在车身支架上的滑轮组后系在减重马甲上;在减重吊绳上设置减重力检测器,通过减重力检测器检测减重吊绳作用在减重马甲上的减重力,减重力检测器的检测值发送给控制系统;
所述行走跟随系统包括行走轮、行走驱动装置和测距装置,行走轮安装在车身支架底部,行走驱动装置驱动行走轮正反转,通过测距装置检测患者与车身支架的相对距离,测距装置的检测值发送给控制系统;
所述控制系统根据设定的减重值和减重力检测器提供的检测值对减重驱动装置进行反馈控制,维持减重吊绳作用在减重马甲上的减重力在设定的偏差范围内;控制系统根据设定的患者与车身支架的相对距离和测距装置提供的检测值对行走驱动装置进行反馈控制,维持患者与车身支架的相对距离在设定的偏差范围内。
该方案的减重车相对于现有技术采用了两个闭环反馈控制:通过对恒定减重系统的闭环反馈控制,保持减重车能够持续稳定地向患者提供减重帮助;通过对走跟随系统的闭环反馈控制,保持减重车能够持续稳定地与患者保持安全距离,跟随患者移动,让患者能够落地行走,提高了患者使用适感。
具体的,对减重驱动装置和行走驱动装置的电机均采用速度控制方法,设定值和检测值的偏差越大,电机的转动速度越快。
具体的,所述行走跟随系统还包括安全光栅,通过安全光栅设定患者与车身支架的安全距离,当安全光栅产生信号时,行走驱动装置的电机执行制动指令。安全光栅是对走跟随系统的一种安全预防措施,防止走跟随系统发生跟踪错误,对患者造成人身伤害,进一步提高减重车的安全性能。
具体的,所述行走驱动装置包括伺服电机、减速机、同步带轮、同步带和驱动轮,同步带轮、同步带和驱动轮构成同步带驱动机构,伺服电机的输出轴通过减速机与同步带轮连接,驱动轮与行走轮同轴固定。
具体的,还包括扶手组件,扶手组建固定在车身支架上,通过扶手组件可以为患者提供辅助支撑,防止摔倒。
具体的,所述滑轮组包括定滑轮系和动滑轮组件,减重吊绳的一端系在减重马甲上,减重吊绳的另一端绕经安装在车身支架上的定滑轮系后缠绕在减重驱动装置的卷轮上,再与减重力检测器连接,减重力检测器安装在车身支架上。
具体的,所述滑轮组包括定滑轮系和动滑轮组件,所述定滑轮系分为左肩定滑轮组和右肩定滑轮组,左肩定滑轮组和右肩定滑轮组对称设置,动滑轮组件包括滑轮、滑轮安装架和吊环,滑轮安装在滑轮安装架上,吊环与滑轮安装架固定;所述减重吊绳分为减重吊绳和减重力检测吊绳两部分,减重吊绳的一端系在减重马甲的左肩上,另一端绕经左肩定滑轮组后,穿过动滑轮组件的吊环,再绕经右肩定滑轮组,系在减重马甲的右肩上;减重力检测吊绳的一端缠绕在减重驱动装置的卷轮上,减重力检测吊绳的另一端绕经动滑轮组件的滑轮,再与减重力检测器连接,减重力检测器安装在车身支架上。
具体的,所述测距装置为激光测距装置或超声波测距装置。
有益效果:本发明提供的康复减重步行训练车,与现有技术相比,具有如下优势:1、该减重车能够为患者提供一个恒定的减重力,使患者能够进行主动发力训练,提高了康复训练效果;2、该减重车可以进行同步跟随,让患者进行落地行走训练,患者的行走体验更好,提高了康复训练效果;3、让一个医护人员能够同时看护两个以上的病人,缓解了对医护人员的需求。
附图说明
图1为本发明的结构示意图;
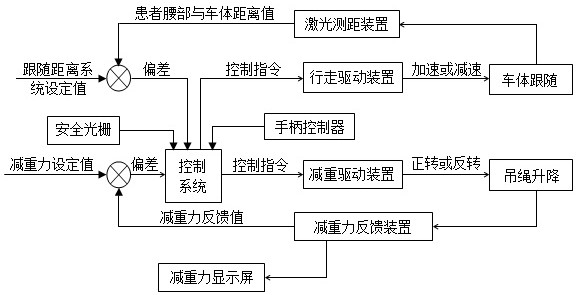
图2为本发明控制系统的控制框图;
图中包括:1-患者;2-车身支架;3-控制系统;4-行走跟随系统;5-测距装置;6-扶手组件;7-安全光栅;8-恒定减重系统;9-减重驱动装置;10-减重力检测器;11-减重吊绳;12-定滑轮系;13-动滑轮组件;14-减重力显示屏。
具体实施方式
以下结合附图和具体实施例对本发明作具体的介绍。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
如图1所示为一种康复减重步行训练车,包括车身支架2、恒定减重系统8、行走跟随系统4、控制系统3和扶手组件6。车身支架2采用型材焊接而成,用于支撑整车结构;扶手组件6通过螺栓固定于车身支架2两侧,用于辅助支撑患者1,防止患者1摔倒。
所述恒定减重系统8包括减重驱动装置9、滑轮组、减重吊绳11、减重马甲、手柄控制器和减重力显示屏14;所述滑轮组包括定滑轮系12和动滑轮组件13,所述定滑轮系12分为左肩定滑轮组和右肩定滑轮组,左肩定滑轮组和右肩定滑轮组对称设置;所述减重吊绳11分为减重吊绳和减重力检测吊绳两部分,减重吊绳的一端系在减重马甲的左肩上,另一端绕经左肩定滑轮组后,穿过动滑轮组件13的吊环,再绕经右肩定滑轮组,系在减重马甲的右肩上;减重力检测吊绳的一端缠绕在减重驱动装置9的卷轮上,减重力检测吊绳的另一端绕经动滑轮组件13的滑轮,再与减重力检测器10连接,减重力检测器10安装在车身支架2上。通过减重力检测器10检测减重吊绳11作用在减重马甲上的减重力,减重力检测器10的检测值发送给控制系统3。
所述行走跟随系统4包括行走轮、行走驱动装置、测距装置5和安全光栅7,行走驱动装置包括伺服电机、减速机、同步带轮、同步带和驱动轮,同步带轮、同步带和驱动轮构成同步带驱动机构,伺服电机的输出轴通过减速机与同步带轮连接,驱动轮与行走轮同轴固定;行走轮安装在车身支架2底部,行走驱动装置驱动行走轮正反转,通过测距装置5实时检测患者腰部与车身支架2的相对距离,测距装置5的检测值发送给控制系统3;安全光栅7固定在车身支架2上,实时检测患者小腿与车身支架2的相对距离,当安全光栅7产生信号时,行走驱动装置的电机执行制动指令,防止减重车发生跟随错误时减重车前冲误伤患者。
所述控制系统3是减重车的控制核心,对减重力检测器10提供的检测值和测距装置5提供的检测值进行运算,根据运算结果产生控制指令,驱动减重驱动装置9和行走驱动装置进行控制,控制框图如图2所示,具体来说:控制系统3根据设定的减重值和减重力检测器10提供的检测值对减重驱动装置9进行反馈控制,维持减重吊绳11作用在减重马甲上的减重力在设定的偏差范围内;控制系统3根据设定的患者与车身支架2的相对距离和测距装置5提供的检测值对行走驱动装置进行反馈控制,维持患者与车身支架2的相对距离在设定的偏差范围内。
医护人员使用本案设备对患者进行康复训练时,患者需要穿戴减重马甲,减重马甲在患者两侧肩部上方通过两个吊钩与减重吊绳11的一端连接,减重吊绳11的另一端先绕经车身支架2上方的定滑轮系12后缠绕在减重驱动装置9的卷轮上,再绕经动滑轮组件13后与减重力检测器10连接,减重力检测器10固定在车身支架2上。
以患者进行坐站训练为例,假设患者下肢已有百分之六十的支撑能力,需要恒定减重25公斤以进行步行训练。患者在站立状态时,医护人员可通过手柄控制器控制减重驱动装置9正转给患者减重,同时观察减重力显示屏14直至减重到达25公斤。将25公斤作为设定的减重值,控制系统3将以此作为基准进行运算控制。当患者进行坐下动作训练时,患者重心下移,减重吊绳11受到的拉力增大,减重力检测器10将检测到的拉力值反馈给控制系统3,控制系统3对比此反馈值和设定的减重值,此时反馈值大于设定值,控制系统3发出指令控制减重驱动装置9反转从而带动减重驱动装置9的卷轮放出减重吊绳11,吊钩随患者肩部下降至减重力检测器10的检测值等于设定的减重值。下降过程中,减重驱动装置9的伺服电机采用速度控制模式:当减重力检测器10的检测值与设定的减重值越大时,伺服电机反转速度越快;反之越慢。患者进行站立动作训练时,患者重心上移,减重吊绳11受到的拉力减小,减重力检测器10将检测到的拉力值反馈给控制系统3,控制系统3对比此反馈值和设定的减重值,此时反馈值小于设定值,控制系统3发出指令控制减重驱动装置9正转从而带动减重驱动装置9的卷轮收回减重吊绳11,吊钩随患者肩部上升至减重力检测器10的检测值等于设定的减重值。上升过程中,减重驱动装置9的伺服电机采用速度控制模式:当减重力检测器10的检测值与设定的减重值越大时,伺服电机正转速度越快;反之越慢。
医护人员使用本案设备对患者进行步行康复训练时,安装在扶手组件6中间位置的测距装置5实时检测患者腰部与车身支架2的相对距离,并将检测值反馈给控制系统3,控制系统3将检测值与设定的患者与车身支架2的相对距离进行对比运算控制。当患者加速行走时,检测值会大于设定的相对距离,控制系统3发出指令控制行走驱动装置加速跟随直至检测值等于设定的相对距离;加速跟随过程中,行走驱动装置的伺服电机采用速度控制模式:当测距装置5的检测值与设定的相对距离越大时,伺服电机的加速跟随速度越快;反之越慢。当患者减速行走时,检测值会小于设定的相对距离,控制系统3发出指令控制行走驱动装置减速跟随直至检测值等于设定的相对距离;减速跟随过程中,行走驱动装置的伺服电机采用速度控制模式:当测距装置5的检测值与设定的相对距离越大时,伺服电机的减速跟随速度越快;反之越慢。
在患者进行步行康复训练时,若患者突然停止或摔倒时,此时测距装置5的检测值会急剧变化,若检测值与设定的相对距离超出安全距离时,控制系统3会发出指令控制行走驱动装置执行紧急刹车动作,整个减重车会立即停止从而防止撞击患者;同时,为了防止该紧急刹车模式失效,我们在车身支架2与患者小腿对应位置安装安全光栅7,当安全光栅7检测到患者小腿时,立刻向控制系统3发出信号,控制系统3会发出指令控制行走驱动装置执行紧急刹车动作,进一步保证患者安全。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,上述实施例不以任何形式限制本发明,凡采用等同替换或等效变换的方式所获得的技术方案,均落在本发明的保护范围内。
- 一种康复减重步行训练车
- 一种康复减重步行训练车的减重装置