车辆、车辆控制系统以及车辆控制方法
文献发布时间:2023-06-19 11:34:14
技术领域
本公开涉及车辆、车辆控制系统以及车辆控制方法。
背景技术
在日本特开2019-156007公开了一种控制装置,使用表示二次电池的输入功率的上限值的第一功率上限值(Win)和表示二次电池的输出功率的上限值的第二功率上限值(Wout),来控制搭载于车辆的二次电池的输入功率和输出功率。
发明内容
近年来,以二次电池为动力源的电动车辆(例如电动汽车或混合动力车)的普及正在发展。在电动车辆中,考虑在二次电池的容量或性能因电池劣化等而降低的情况下,更换搭载于电动车辆的二次电池。
二次电池通常以电池包的形态搭载于车辆。电池包构成为包括二次电池、检测二次电池的状态(例如,电流、电压和温度)的传感器以及控制装置。以下,有时将内置于电池包的控制装置、传感器分别记载为“电池ECU”、“电池传感器”。在电池包搭载与二次电池匹配的周边设备(例如,传感器和控制装置)。在电池包中,进行保养以使二次电池及其周边设备正常工作。因此,在更换搭载于车辆的二次电池时,从车辆保养的观点出发,认为优选的是对包括搭载于车辆的电池包在内进行更换,而不是仅更换二次电池。
如上述日本特开2019-156007所记载的那样,已知有一种控制装置(以下,也称为“功率限制型的控制装置”),该控制装置与电池包分开搭载于车辆,并使用功率上限值来控制二次电池的输入功率及输出功率中的至少一方。功率限制型的控制装置构成为,以功率基准来进行二次电池的输入限制及输出限制中的至少一方。功率基准的输入限制是以使二次电池的输入功率不超过第一功率上限值的方式控制二次电池的输入功率的处理。功率基准的输出限制是以使二次电池的输出功率不超过第二功率上限值的方式控制二次电池的输出功率的处理。通常,在采用功率限制型的控制装置的车辆搭载电池包(以下,也称为“功率限制型的电池包”),该电池包包括使用电池传感器的检测值来求出功率上限值的电池ECU。
另一方面,还已知有一种控制装置(以下,也称为“电流限制型的控制装置”),该控制装置与电池包分开搭载于车辆上,并使用表示二次电池的电流的上限值的电流上限值来控制二次电池的电流。电流限制型的控制装置构成为,以电流基准来进行二次电池的输入限制及输出限制中的至少一方。电流基准的输入限制是以使二次电池的输入电流不超过第一电流上限值的方式控制二次电池的输入电流的处理。电流基准的输出限制是以使二次电池的输出电流不超过第二电流上限值的方式控制二次电池的输出电流的处理。通常,在采用电流限制型的控制装置的车辆搭载电池包(以下,也称为“电流限制型的电池包”),该电池包包括使用电池传感器的检测值来求出电流上限值的电池ECU。
根据电池包的供需状况(或者库存状况),有时电流限制型的电池包比功率限制型的电池包更容易得到。但是,没有设想将电流限制型的电池包和功率限制型的控制装置组合使用的情况,并且针对用于将电流限制型的电池包和功率限制型的控制装置组合使用的方法没有进行任何研究。因此,在搭载功率限制型的控制装置的车辆中,难以采用电流限制型的电池包。
本公开提供一种能够以功率基准对电流限制型的电池包中包含的二次电池进行输入限制及输出限制中的至少一方的车辆、车辆控制系统以及车辆控制方法。
本公开的第一方式所涉及的车辆具备电池包、与电池包分开设置的第二控制装置、以及变换器。电池包包括二次电池、检测二次电池的状态的电池传感器以及第一控制装置。第一控制装置构成为,使用电池传感器的检测值来求出表示二次电池的输入电流的上限值的第一电流上限值和表示二次电池的输出电流的上限值的第二电流上限值中的至少一方。第二控制装置构成为,使用表示二次电池的输入功率的上限值的第一功率上限值和表示二次电池的输出功率的上限值的第二功率上限值中的至少一方来控制二次电池的输入功率和二次电池的输出功率中的至少一方。变换器构成为根据状况从选项之中选择变换公式,并构成为使用选择的变换公式来将第一电流上限值和第二电流上限值中的至少一方变换为第一功率上限值和第二功率上限值中的至少一方。
根据本公开的第一方式所涉及的车辆,搭载有变换器,该变换器将电流上限值(即,第一电流上限值和第二电流上限值中的至少一方)变换为功率上限值(即,第一功率上限值和第二功率上限值中的至少一方)。因此,即使在采用了电流限制型的电池包的情况下,第二控制装置也能够以功率基准对电池包中包含的二次电池进行输入限制及输出限制中的至少一方。
另外,变换器的从电流上限值向功率上限值的变换精度(以下也简称为“变换精度”)根据变换所使用的变换公式而不同。如果变换精度高,则能够得到与电流上限值对应的功率上限值。通过使用与电流上限值对应的功率上限值来控制二次电池的功率,二次电池的电流值的上升大致被电流上限值限制。另一方面,如果变换精度变低,则通过变换得到的功率上限值与电流上限值不对应。在使用这样的功率上限值来控制二次电池的功率的情况下,有时会允许电流值上升到比电流上限值高的电流值,或者以比电流上限值低的电流值来限制电流值的上升。
为了提高二次电池的电流的控制性,优选使用变换精度高的变换公式来进行上述变换。但是,另一方面,存在变换公式的变换精度越高,用于变换的运算负荷越大的倾向。
根据本公开的第一方式所涉及的车辆,根据状况从选项之中选择变换公式,并使用选择的变换公式来进行从电流上限值向功率上限值的变换。因此,在要求严格控制二次电池的电流的状况下,通过选择变换精度高的变换公式,能够提高二次电池的电流的控制性。另外,在不要求严格控制二次电池的电流的状况下,通过允许运算负荷小的变换公式(即,变换精度低的变换公式)的使用(选择),能够减轻变换器的运算负荷。变换公式的选项可以任意设定。
在本公开的第一方式所涉及的车辆中,所述第一控制装置也可以构成为,使用电池传感器的检测值来求出第一电流上限值。上述第二控制装置也可以构成为,以使二次电池的输入功率不超过第一功率上限值的方式控制二次电池的输入功率。上述的选项也可以包括:第一变换公式,用于通过将由电池传感器检测出的二次电池的电压的实测值与第一电流上限值相乘来将第一电流上限值变换为第一功率上限值;及第二变换公式,用于通过将第一电压推定值与第一电流上限值相乘来将第一电流上限值变换为第一功率上限值,所述第一电压推定值是流过与第一电流上限值相当的电流的状态下的二次电池的电压值。上述变换器也可以构成为,在二次电池的状态包含于规定的第一状态的情况下选择第二变换公式,在二次电池的状态不包含于第一状态的情况下选择第一变换公式。
根据本公开的第一方式所涉及的车辆,第一变换公式使用二次电池的电压的实测值来将第一电流上限值变换为第一功率上限值。由于第一变换公式直接使用电压的实测值,所以不进行复杂的运算就能够将第一电流上限值变换为第一功率上限值。
另一方面,在第二变换公式中,使用第一电压推定值来将第一电流上限值变换为第一功率上限值。二次电池的电压根据电流的大小而变化,第二变换公式通过使第一电流上限值乘以如上所述的第一电压推定值(即,流过与第一电流上限值相当的电流的状态下的二次电池的电压值),来将第一电流上限值变换为第一功率上限值。由此,能够以高精度取得与第一电流上限值对应的第一功率上限值。
如上所述,在第二变换公式中,考虑到二次电池的电压根据电流的大小而变化的情况,在使用第二变换公式的变换中,能够以比使用第一变换公式的变换高的精度取得与第一电流上限值对应的第一功率上限值。但是,即使在使用第一变换公式的变换中,也能够确保不会过度妨碍二次电池的电流的控制性的程度的变换精度。在具有上述结构的车辆中,如果将例如要求严格控制二次电池的电流的二次电池的状态设定为上述第一状态,则在通常时(即,在二次电池的状态不包含于第一状态的情况下),使用通过第一变换公式进行变换所得的第一功率上限值来进行功率基准的输入限制,由此减轻变换器的运算负荷。另一方面,在要求严格控制二次电池的电流的状况下(即,在二次电池的状态包含于第一状态的情况下),使用通过第二变换公式进行变换所得的第一功率上限值来进行功率基准的输入限制,能够提高二次电池的输入电流的控制性。
在本公开的第一方式所涉及的车辆中,上述第一控制装置也可以构成为,使用电池传感器的检测值来求出第二电流上限值。上述第二控制装置也可以构成为,以使二次电池的输出功率不超过第二功率上限值的方式控制二次电池的输出功率。上述的选项也可以包括:第三变换公式,用于通过将由电池传感器检测出的二次电池的电压的实测值与第二电流上限值相乘来将第二电流上限值变换为第二功率上限值;及第四变换公式,通过将第二电压推定值与第二电流上限值相乘来将第二电流上限值变换为第二功率上限值,所述第二电压推定值是流过与第二电流上限值相当的电流的状态下的二次电池的电压值。变换器也可以构成为,在二次电池的状态包含于规定的第二状态的情况下选择第四变换公式,在二次电池的状态不包含于第二状态的情况下选择第三变换公式。
第三变换公式使用二次电池的电压的实测值来将第二电流上限值变换为第二功率上限值。由于第三变换公式直接使用电压的实测值,所以不进行复杂的运算就能够将第二电流上限值变换为第二功率上限值。第四变换公式使用流过与第二电流上限值相当的电流的状态下的二次电池的电压值(即,第二电压推定值),来将第二电流上限值变换为第二功率上限值。在第四变换公式中,与上述的第二变换公式同样地,考虑到二次电池的电压根据电流的大小而变化的情况,在使用第四变换公式的变换中,能够以比使用第三变换公式的变换高的精度取得与第二电流上限值对应的第二功率上限值。但是,即使在使用第三变换公式的变换中,也能够确保不会过度妨碍二次电池的电流的控制性的程度的变换精度。根据本公开的第一方式所涉及的车辆,如果将例如要求严格控制二次电池的电流的二次电池的状态设定为上述第二状态,则在通常时(即,在二次电池的状态不包含于第二状态的情况下),使用通过第三变换公式进行变换所得的第二功率上限值来进行功率基准的输出限制,由此减轻变换器的运算负荷。另一方面,在要求严格控制二次电池的电流的状况下(即,在二次电池的状态包含于第二状态的情况下),使用通过第四变换公式进行变换所得的第二功率上限值来进行功率基准的输出限制,能够提高二次电池的输出电流的控制性。
在本公开的第一方式所涉及的车辆中,也可以还具备第三控制装置,该第三控制装置与电池包分开设置,并构成为对第一控制装置与第二控制装置之间的通信进行中继。上述变换器也可以搭载于第三控制装置。电池包也可以构成为,输出第一电流上限值及第二电流上限值中的至少一方。第三控制装置也可以构成为,当从电池包输入了第一电流上限值及第二电流上限值中的至少一方时,通过变换器将第一电流上限值和第二电流上限值中的至少一方变换为第一功率上限值和第二功率上限值中的至少一方。第三控制装置也可以构成为,向第二控制装置输出第一功率上限值和第二功率上限值中的至少一方。
根据本公开的第一方式所涉及的车辆,与电池包分开设置的第三控制装置包括上述变换器,并通过变换器将电流上限值变换为功率上限值。因此,能够在不变更电池包(包括第一控制装置)及第二控制装置的结构的前提下,将上述变换器搭载于车辆。
在本公开的第一方式所涉及的车辆中,上述第三控制装置也可以构成为,在输入了第一电流上限值和第二电流上限值中的至少一方的情况下,进行上述的变换而输出第一功率上限值和第二功率上限值中的至少一方,并在输入了第一功率上限值和第二功率上限值中的至少一方的情况下,不进行上述的变换而输出第一功率上限值和第二功率上限值中的至少一方。
根据本发明的第一方式所涉及的车辆,在车辆搭载有电流限制型的电池包的情况下,上述第三控制装置对从电流限制型的电池包输入的电流上限值进行上述变换而输出功率上限值。另一方面,在车辆搭载有功率限制型的电池包的情况下,上述第三控制装置不对从功率限制型的电池包输入的功率上限值进行上述变换而输出功率上限值。因此,无论采用电流限制型的电池包还是功率限制型的电池包,第二控制装置均能够以功率基准对电池包中包含的二次电池进行输入限制及输出限制中的至少一方。
在本公开的第一方式所涉及的车辆中,上述变换器也可以搭载于第一控制装置。第一控制装置也可以构成为,在与第二控制装置连接的情况下,通过变换器将使用电池传感器的检测值而求出的第一电流上限值和第二电流上限值中的至少一方变换为第一功率上限值和第二功率上限值中的至少一方,并将得到的第一功率上限值和第二功率上限值中的至少一方向第二控制装置输出。
根据本公开的第一方式所涉及的车辆,变换器被集成于第一控制装置(即,电池包的内部)。由此,能够在电池包的内部将电流上限值变换为功率上限值,并从电池包输出功率上限值。因此,不追加上述的第三控制装置,第二控制装置就能够以功率基准适当地对电池包中包含的二次电池进行输入限制及输出限制中的至少一方。
在本公开的第一方式所涉及的车辆中,上述变换器也可以搭载于第二控制装置。电池包也可以构成为,输出第一电流上限值及第二电流上限值中的至少一方。第二控制装置也可以构成为,通过变换器将从电池包输入的第一电流上限值和第二电流上限值中的至少一方变换为第一功率上限值和第二功率上限值中的至少一方,并使用得到的第一功率上限值和第二功率上限值中的至少一方来控制二次电池的输入功率和二次电池的输出功率中的至少一方。
根据本发明的第一方式所涉及的车辆,与电池包分开设置的第二控制装置包括上述变换器,并通过变换器将电流上限值变换为功率上限值。因此,能够在不变更电池包(包括第一控制装置)的结构的前提下,将上述变换器搭载于车辆。另外,不追加上述的第三控制装置,第二控制装置就能够以功率基准适当地对电池包中包含的二次电池进行输入限制及输出限制中的至少一方。
本公开的第二方式所涉及的车辆控制系统是如下的车辆控制系统,即,所述车辆控制系统构成为安装电池包的车辆控制系统,该电池包包括:二次电池;电池传感器,构成为检测二次电池的状态;及控制装置,构成为使用电池传感器的检测值来求出表示二次电池的输入电流的上限值的第一电流上限值和表示二次电池的输出电流的上限值的第二电流上限值中的至少一方。车辆控制系统包括控制部和变换部。控制部构成为,在电池包被安装到该车辆控制系统的情况下,使用表示二次电池的输入功率的上限值的第一功率上限值和表示二次电池的输出功率的上限值的第二功率上限值中的至少一方来控制二次电池的输入功率和二次电池的输出功率中的至少一方。变换部构成为,根据状况从选项之中选择变换公式,并使用选择的变换公式来将从电池包输入的第一电流上限值和第二电流上限值中的至少一方变换为第一功率上限值和第二功率上限值中的至少一方,并且将得到的第一功率上限值和第二功率上限值中的至少一方向控制部输出。
在本公开的第二方式所涉及的车辆控制系统中,能够根据状况使用适当的变换公式来将电流上限值(即,第一电流上限值和第二电流上限值中的至少一方)变换为功率上限值(即,第一功率上限值和第二功率上限值中的至少一方)。因此,即使在采用了电流限制型的电池包的情况下,第二控制装置也能够以功率基准适当地对电池包中包含的二次电池进行输入限制及输出限制中的至少一方。
本公开的第三方式所涉及的车辆控制方法包括以下步骤:安装有电池包的车辆控制系统从电池包取得第一电流上限值和第二电流上限值中的至少一方,所述电池包包括:二次电池;电池传感器,构成为检测二次电池的状态;及控制装置,构成为使用电池传感器的检测值来求出表示二次电池的输入电流的上限值的第一电流上限值和表示二次电池的输出电流的上限值的第二电流上限值中的至少一方;上述车辆控制系统从选项之中选择变换公式;上述车辆控制系统使用在上述第二步骤中选择的变换公式来将在上述第一步骤中从电池包取得的第一电流上限值和第二电流上限值中的至少一方变换为第一功率上限值和第二功率上限值中的至少一方;及上述车辆控制系统使用通过上述第三步骤而得到的第一功率上限值和第二功率上限值中的至少一方来控制二次电池的输入功率和二次电池的输出功率中的至少一方。
根据本公开的第三方式所涉及的车辆控制方法,能够根据状况使用适当的变换公式来将电流上限值(即,第一电流上限值和第二电流上限值中的至少一方)变换为功率上限值(即,第一功率上限值和第二功率上限值中的至少一方)。因此,即使在采用了电流限制型的电池包的情况下,第二控制装置也能够以功率基准适当地对电池包中包含的二次电池进行输入限制及输出限制中的至少一方。
根据本公开,能提供一种能够以功率基准对电流限制型的电池包中包含的二次电池进行输入限制及输出限制中的至少一方的车辆、车辆控制系统以及车辆控制方法。
附图说明
下面将参考附图描述本发明的示例性实施例的特征、优点以及技术和工业重要性,附图中相同的附图标记表示相同的元件,并且其中:
图1是表示本公开的实施方式所涉及的车辆的结构的图。
图2是表示本公开的实施方式所涉及的车辆中包含的各控制装置的连接方式的图。
图3是表示在本公开的实施方式所涉及的车辆中为了设定目标电池功率而使用的映射图的一例的图。
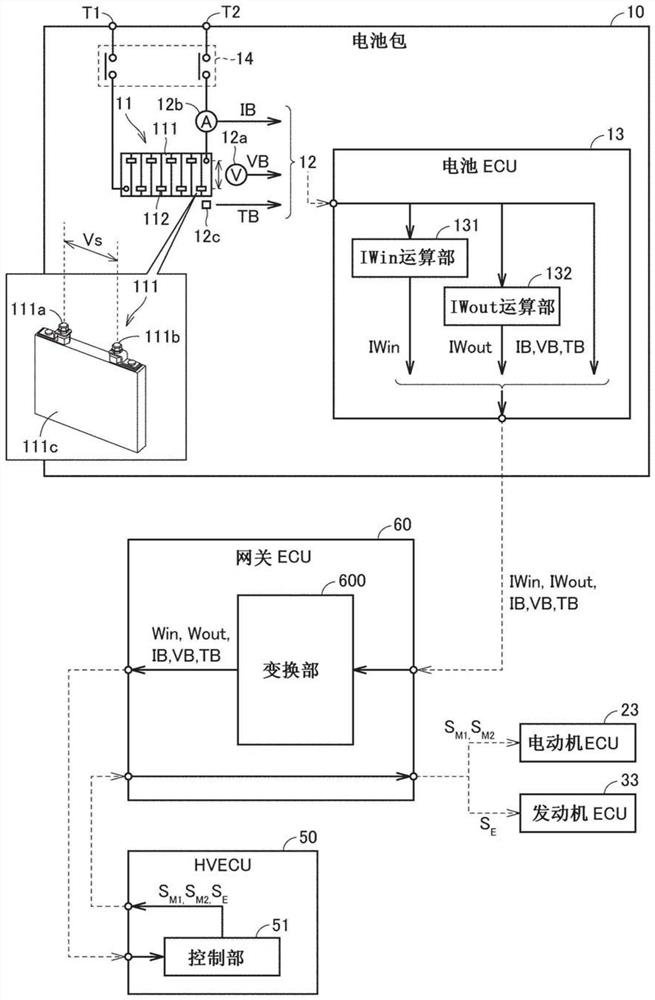
图4是表示图1所示的电池包、网关ECU以及HVECU的详细结构的图。
图5是表示图4所示的变换部的详细结构的图。
图6是用于对本公开的实施方式所涉及的第一电压推定值的取得方法进行说明的图。
图7是用于对本公开的实施方式所涉及的第二电压推定值的取得方法进行说明的图。
图8是表示本公开的实施方式所涉及的车辆控制方法的处理步骤的流程图。
图9是表示图8所示的Win设定处理的详细情况的流程图。
图10是用于对在本公开的实施方式所涉及的车辆控制方法中所使用的第一状态进行说明的图。
图11是表示图8所示的Wout设定处理的详细情况的流程图。
图12是用于对在本公开的实施方式所涉及的车辆控制方法中所使用的第二状态进行说明的图。
图13是表示本公开的实施方式所涉及的车辆控制系统的第一例的图。
图14是表示本公开的实施方式所涉及的车辆控制系统的第二例的图。
图15是表示图4所示的网关ECU的变形例的图。
图16是表示图4所示的HVECU的变形例的图。
图17是表示图4所示的车辆控制系统的第一变形例的图。
图18是表示图4所示的车辆控制系统的第二变形例的图。
具体实施方式
参照附图对本公开的实施方式进行详细说明。图中,相同或相当的部分标注同一标号,并且不重复其说明。以下,也将电子控制单元(Electronic Control Unit)称为“ECU”。
图1是表示本实施方式所涉及的车辆的结构的图。在该实施方式中,设想了前轮驱动的四轮汽车(更特定地是混合动力车),但车轮的数量及驱动方式能够适当变更。例如,驱动方式也可以是四轮驱动。
参照图1,在车辆100搭载有包括电池ECU13的电池包10。另外,与电池包10分开地,电动机ECU23、发动机ECU33、HVECU50和网关ECU60被搭载于车辆100。电动机ECU23、发动机ECU33、HVECU50和网关ECU60分别位于电池包10的外侧。电池ECU13位于电池包10的内部。本实施方式所涉及的电池ECU13、HVECU50、网关ECU60可以分别视为本公开所涉及的“第一控制装置”、“第二控制装置”、“第三控制装置”的一例。
电池包10包括蓄电池11、电压传感器12a、电流传感器12b、温度传感器12c、电池ECU13以及SMR(System Main Relay:系统主继电器)14。蓄电池11作为二次电池发挥功能。在本实施方式中,采用包含电连接的多个锂离子电池的电池组作为蓄电池11。构成电池组的各二次电池也被称为“电池单元”。在本实施方式中,构成蓄电池11的各锂离子电池相当于“电池单元”。另外,电池包10所包含的二次电池并不限于锂离子电池,也可以是其他的二次电池(例如镍氢电池)。作为二次电池,可以采用电解液式二次电池,也可以采用全固态式二次电池。
电压传感器12a检测蓄电池11的每个电池单元的电压。电流传感器12b检测流过蓄电池11的电流(将充电侧设为负)。温度传感器12c检测蓄电池11的每个电池单元的温度。各传感器将其检测结果向电池ECU13输出。电流传感器12b设置于蓄电池11的电流路径。在本实施方式中,电压传感器12a及温度传感器12c各自针对每一个电池单元设置一个。但是,并不限于此,电压传感器12a及温度传感器12c各自也可以针对每多个电池单元设置一个,还可以相对于一个电池组仅设置一个。以下,将电压传感器12a、电流传感器12b以及温度传感器12c统称为“电池传感器12”。电池传感器12可以是除了上述传感器功能以外,还具有SOC(State Of Charge:荷电状态)推定功能、SOH(State of Health:健康状态)推定功能、电池单元电压的均等化功能、诊断功能以及通信功能的BMS(Battery Management System:电池管理系统)。
SMR14构成为切换对电池包10的外部连接端子T1、T2与蓄电池11进行连结的电力路径的连接/切断。作为SMR14,例如可以采用电磁式的机械继电器。在本实施方式中,PCU(Power Control Unit:功率控制单元)24与电池包10的外部连接端子T1、T2连接。蓄电池11经由SMR14与PCU24连接。在SMR14处于闭合状态(连接状态)时,能够在蓄电池11与PCU24之间进行电力的授受。另一方面,在SMR14处于开路状态(切断状态)时,连结蓄电池11与PCU24的电力路径被切断。在本实施方式中,SMR14由电池ECU13控制。电池ECU13按照来自HVECU50的指示来控制SMR14。SMR14例如在车辆100行驶时处于闭合状态(连接状态)。
车辆100具备发动机31、第一电动发电机21a(以下记为“MG21a”)、第二电动发电机21b(以下记为“MG21b”)作为行驶用的动力源。MG21a和21b分别为兼具作为通过被供给驱动电力而输出转矩的电动机的功能以及作为通过被施加转矩而产生发电电力的发电机的功能这两者的电动发电机。作为MG21a和21b,分别使用交流电动机(例如,永磁同步电动机或感应电动机)。MG21a和21b分别经由PCU24与蓄电池11电连接。MG21a、MG21b分别具有转子轴42a、42b。转子轴42a、42b分别相当于MG21a、MG21b的旋转轴。
车辆100还具备单小齿轮型的行星齿轮42。发动机31的输出轴41和MG21a的转子轴42a分别与行星齿轮42连结。发动机31例如是包括多个气缸(例如,4个气缸)的火花点火式内燃机。发动机31通过使燃料(例如汽油)在各气缸内燃烧来生成动力,并利用所生成的动力使所有气缸共用的曲轴(未图示)旋转。发动机31的曲轴经由未图示的扭振阻尼器与输出轴41连接。通过曲轴旋转,输出轴41也旋转。另外,发动机31并不限于汽油发动机,也可以是柴油发动机。
行星齿轮42具有3个旋转要素,即输入要素、输出要素和反作用力要素。更具体而言,行星齿轮42具有:太阳齿轮;与太阳齿轮同轴配置的齿圈;与太阳齿轮及齿圈啮合的小齿轮;以及将小齿轮以能够自转且能够公转的方式进行保持的行星齿轮架。行星齿轮架相当于输入要素,齿圈相当于输出要素,太阳齿轮相当于反作用力要素。
发动机31和MG21a彼此经由行星齿轮42机械连结。发动机31的输出轴41与行星齿轮42的行星齿轮架连结。MG21a的转子轴42a与行星齿轮42的太阳齿轮连结。行星齿轮架被输入由发动机31输出的转矩。行星齿轮42构成为将发动机31输出到输出轴41的转矩分配并传递给太阳齿轮(进而MG21a)和齿圈。在发动机31输出的转矩向齿圈输出时,由MG21a产生的反作用力转矩作用于太阳齿轮。
行星齿轮42和MG21b构成为,将从行星齿轮42输出的动力(即,输出到齿圈的动力)和从MG21b输出的动力(即,输出到转子轴42b的动力)合并而传递到驱动轮45a、45b。更具体而言,在行星齿轮42的齿圈安装有与从动齿轮43啮合的输出齿轮(未图示)。另外,安装于MG21b的转子轴42b的驱动齿轮(未图示)也与从动齿轮43啮合。从动齿轮43以将MG21b输出到转子轴42b的转矩和从行星齿轮42的齿圈输出的转矩合成的方式发挥作用。如此合成的驱动转矩传递到差动齿轮44,进一步经由从差动齿轮44向左右延伸的驱动轴44a、44b传递到驱动轮45a、45b。
在MG21a、21b分别设置有检测MG21a、21b的状态(例如,电流、电压、温度和转速)的电动机传感器22a、22b。电动机传感器22a及22b分别将其检测结果向电动机ECU23输出。在发动机31设置有检测发动机31的状态(例如,进气量、进气压力、进气温度、排气压力、排气温度、催化剂温度、发动机冷却水温度以及转速)的发动机传感器32。发动机传感器32将其检测结果向发动机ECU33输出。
HVECU50构成为向发动机ECU33输出用于控制发动机31的指令(控制指令)。发动机ECU33构成为按照来自HVECU50的指令来控制发动机31的各种致动器(例如,未图示的节气门、点火装置以及喷射器)。HVECU50能够通过发动机ECU33来进行发动机控制。
HVECU50构成为向电动机ECU23输出用于分别控制MG21a及MG21b的指令(控制指令)。电动机ECU23构成为,按照来自HVECU50的指令,生成与MG21a及MG21b各自的目标转矩相对应的电流信号(例如,表示电流的大小及频率的信号),并将所生成的电流信号向PCU24输出。HVECU50能够通过电动机ECU23来进行电动机控制。
PCU24例如构成为包括与MG21a、21b对应设置的两个变换器、以及配置在各变换器与蓄电池11之间的转换器(均未图示)。PCU24构成为将蓄积在蓄电池11中的电力分别供给到MG21a及MG21b,并且将由MG21a及MG21b分别产生的电力供给到蓄电池11。PCU24构成为能够单独地控制MG21a、MG21b的状态,例如能够使MG21a成为再生状态(即发电状态),并且使MG21b成为动力运行状态。PCU24构成为能够将由MG21a及MG21b中的一方产生的电力供给到另一方。MG21a及MG21b构成为能够相互授受电力。
车辆100构成为进行HV行驶和EV行驶。HV行驶是一边由发动机31产生行驶驱动力一边通过发动机31及MG21b进行的行驶。EV行驶是在发动机31停止的状态下通过MG21b进行的行驶。在发动机31停止的状态下,不再进行各气缸中的燃烧。当各气缸中的燃烧停止时,不再由发动机31产生燃烧能量(进而不再产生行驶驱动力)。HVECU50构成为根据状况切换EV行驶和HV行驶。
车辆100还具备辅机70。辅机70是在车辆100中在EV行驶之外消耗电力的负载。在本实施方式中,辅机70包括空调装置。在辅机70处于工作状态时,蓄电池11的电力被辅机70消耗。
虽然省略了图示,但车辆100还具备供用户驾驶车辆100的装置(例如,转向装置、加速装置以及制动装置)。在本实施方式中,作为制动装置,采用液压式脚制动器。
图2是表示本实施方式所涉及的车辆100中包含的各控制装置的连接方式的图。参照图1及图2,车辆100具有包括局部总线B1和全局总线B2的车载LAN。搭载于车辆100的各控制装置(例如,电池ECU13、电动机ECU23以及发动机ECU33)与车载LAN连接。在本实施方式中,作为车载LAN的通信协议,采用CAN(Controller Area Network:控制器局域网)。局部总线B1和全局总线B2中的每一个例如是CAN总线。但是,车载LAN的通信协议并不限于CAN,而是任意的,例如也可以是FlexRay。
在局部总线B1连接有电池ECU13、电动机ECU23和发动机ECU33。虽然省略了图示,但在全局总线B2连接有多个控制装置。与全局总线B2连接的多个控制装置例如包括HMI(Human Machine Interface:人机接口)控制装置。作为HMI控制装置的例子,可举出控制导航系统或仪表面板的控制装置。另外,全局总线B2经由未图示的CGW(中央网关)与其他的全局总线连接。
HVECU50与全局总线B2连接。HVECU50构成为与连接于全局总线B2的各控制装置相互进行CAN通信。另外,HVECU50经由网关ECU60与局部总线B1连接。网关ECU60构成为对HVECU50与连接于局部总线B1的各控制装置(例如,电池ECU13、电动机ECU23和发动机ECU33)之间的通信进行中继。HVECU50经由网关ECU60与连接于局部总线B1的各控制装置相互进行CAN通信。网关ECU60也可以构成为汇集与车辆100有关的数据(例如,由车载传感器取得的各种信息、后述的IWin、IWout、Win、Wout以及控制指令S
在本实施方式中,采用微型计算机作为电池ECU13、电动机ECU23、发动机ECU33、HVECU50和网关ECU60中的每一个。电池ECU13、电动机ECU23、发动机ECU33、HVECU50、网关ECU60分别构成为包括处理器13a、23a、33a、50a、60a、RAM(Random Access Memory:随机存取存储器)13b、23b、33b、50b、60b、存储装置13c、23c、33c、50c、60c以及通信I/F(接口)13d、23d、33d、50d、60d。作为各处理器,可以采用例如CPU(Central Processing Unit:中央处理单元)。各通信I/F包括CAN控制器。RAM作为临时存储由处理器处理的数据的作业用存储器发挥功能。存储装置构成为能够保存所存放的信息。各存储装置例如包括ROM(Read OnlyMemory:只读存储器)及能够改写的非易失性存储器。在各存储装置中,除了程序以外,还存储有在程序中使用的信息(例如,映射图、公式以及各种参数)。通过各处理器执行存储在各存储装置中的程序,由此执行车辆100的各种控制。但是,并不限于此,各种控制也可以通过专用的硬件(电子电路)来执行。各ECU所具备的处理器的数量也是任意的,任一ECU可以具备多个处理器。
再次参照图1,对蓄电池11的充放电控制进行说明。以下,将蓄电池11的输入功率和蓄电池11的输出功率统称为“电池功率”。HVECU50使用蓄电池11的SOC(State OfCharge:荷电状态)来决定目标电池功率。然后,HVECU50以使电池功率接近目标电池功率的方式控制蓄电池11的充放电。但是,这样的蓄电池11的充放电控制受到后述的输入输出限制的制约。以下,有时将充电侧(输入侧)的目标电池功率记载为“目标输入功率”,并将放电侧(输出侧)的目标电池功率记载为“目标输出功率”。在本实施方式中,用正(+)表示放电侧的功率,用负(-)表示充电侧的功率。但是,在比较功率的大小时,与符号(+/-)无关地以绝对值进行比较。即,值越接近于0,功率越小。在针对功率设置上限值和下限值的情况下,上限值位于功率的绝对值较大的一侧,下限值位于功率的绝对值较小的一侧。功率超过正侧的上限值意味着功率与上限值相比向正侧变大(即,相对于0向正侧远离)。功率超过负侧的上限值意味着功率与上限值相比向负侧变大(即,相对于0向负侧远离)。SOC表示蓄电余量,例如将当前的蓄电量相对于满充电状态的蓄电量的比例用0~100%来表示。作为SOC的测定方法,可以采用例如电流积分法或OCV推定法这样的公知的方法。
图3是表示用于决定目标电池功率的映射图的一例的图。在图3中,基准值C
HVECU50构成为进行蓄电池11的输入限制和输出限制。HVECU50对表示蓄电池11的输入功率的上限值的第一功率上限值(以下记为“Win”)和表示蓄电池11的输出功率的上限值的第二功率上限值(以下记为“Wout”)进行设定,并以使电池功率不超过所设定的Win及Wout的方式控制电池功率。HVECU50通过控制发动机31及PCU24来调整电池功率。在Win或Wout小于目标电池功率(即,接近0)的情况下,电池功率被控制成Win或Wout,而不是目标电池功率。在本实施方式中,Win、Wout可以分别视为本公开所涉及的“第一功率上限值”和“第二功率上限值”的一例。
电池ECU13构成为,使用电池传感器12的检测值来求出表示蓄电池11的输入电流的上限值的第一电流上限值(以下有时记为“IWin”)。另外,电池ECU13构成为,使用电池传感器12的检测值来求出表示蓄电池11的输出电流的上限值的第二电流上限值(以下有时记为“IWout”)。即,电池包10相当于电流限制型的电池包。另一方面,HVECU50构成为使用Win来控制蓄电池11的输入功率。HVECU50构成为进行功率基准的输入限制(即,以使蓄电池11的输入功率不超过Win的方式控制蓄电池11的输入功率的处理)。另外,HVECU50构成为使用Wout来控制蓄电池11的输出功率。HVECU50构成为进行功率基准的输出限制(即,以使蓄电池11的输出功率不超过Wout的控制蓄电池11的输出功率的处理)。即,HVECU50相当于功率限制型的控制装置。在本实施方式中,IWin、IWout可以分别视为本公开所涉及的“第一电流上限值”、“第二电流上限值”的一例。
如上所述,车辆100具备电流限制型的电池包(即电池包10)和功率限制型的控制装置(即HVECU50)。在车辆100中,电流限制型的电池包和功率限制型的控制装置被组合使用。虽然从电池包10输出IWin及IWout,但利用介于电池包10与HVECU50之间的网关ECU60将IWin、IWout变换为Win、Wout。由此,Win和Wout被输入到HVECU50。通过这样的结构,HVECU50能够对电池包10中包含的蓄电池11适当地进行功率基准的输入限制及输出限制。
图4是表示电池包10、网关ECU60以及HVECU50的详细结构的图。参照图2及图4,在本实施方式中,电池包10中包含的蓄电池11是包含多个电池单元111的电池组。各电池单元111例如是锂离子电池。各电池单元111具备正极端子111a、负极端子111b、电池壳体111c。正极端子111a与负极端子111b之间的电压相当于电池单元电压Vs。蓄电池11中,一个电池单元111的正极端子111a与相邻的另一个电池单元111的负极端子111b通过具有导电性的汇流条112电连接。电池单元111彼此串联连接。但是,并不限于此,电池组中的电池单元的连接方式是任意的。
电池包10除了上述蓄电池11以外,还内置电池传感器12、电池ECU13、SMR14。从电池传感器12向电池ECU13输出的信号(以下,也称为“电池传感器信号”)包括从电压传感器12a输出的电压信号VB、从电流传感器12b输出的电流信号IB、以及从温度传感器12c输出的温度信号TB。电压信号VB表示各电池单元111的电压(电池单元电压Vs)的实测值。电流信号IB表示流过蓄电池11的电流的实测值(将充电侧设为负)。温度信号TB表示各电池单元111的温度的实测值。
电池ECU13反复取得最新的电池传感器信号。电池ECU13取得电池传感器信号的间隔(以下,也称为“采样周期”)既可以是固定值,也可以是可变的。在本实施方式中,将采样周期设为8毫秒。但是,并不限于此,采样周期也可以在规定范围(例如,1毫秒以上且1秒以下的范围)内可变。以下,有时将每单位时间由电池ECU13取得电池传感器信号的次数记载为“采样率”。存在采样率越高,通过后述的变换处理求出Win、Wout的精度(即变换精度)越高的倾向。
电池ECU13包括IWin运算部131和IWout运算部132。IWin运算部131构成为使用电池传感器12的检测值(即,电池传感器信号)来求出IWin。作为IWin的运算方法,可以采用公知的方法。IWin运算部131可以决定IWin以进行用于保护蓄电池11的充电电流限制。IWin例如可以被决定为抑制蓄电池11中的过充电、Li析出、高速率劣化以及电池过热。IWout运算部132构成为使用电池传感器12的检测值(即,电池传感器信号)来求出IWout。作为IWout的运算方法,可以采用公知的方法。IWout运算部132可以决定IWout以进行用于保护蓄电池11的放电电流限制。IWout例如可以被决定为抑制蓄电池11中的过放电、Li析出、高速率劣化以及电池过热。在电池ECU13中,例如通过图2所示的处理器13a和由处理器13a执行的程序来具体实现IWin运算部131和IWout运算部132。但是,并不限于此,上述各部也可以通过专用的硬件(电子电路)来具体实现。
电池包10将IWin运算部131求出的IWin、IWout运算部132求出的IWout以及从电池传感器12取得的信号(即,电池传感器信号)向网关ECU60输出。这些信息从电池包10中包含的电池ECU13向设于电池包10的外部的网关ECU60输出。如图2所示,电池ECU13与网关ECU60通过CAN通信来交换信息。
网关ECU60包括以下说明的变换部600。图5是表示变换部600的详细结构的图。参照图4及图5,变换部600包括选择部611、621、第一推定部612、第二推定部622以及运算部613、623。在网关ECU60中,例如通过图2所示的处理器60a和由处理器60a执行的程序来具体实现变换部600(进而实现选择部611、621、第一推定部612、第二推定部622以及运算部613、623)。但是,并不限于此,变换部600也可以通过专用的硬件(电子电路)来具体实现。本实施方式所涉及的变换部600可以视为本公开所涉及的“变换器”的一例。
选择部611构成为,根据状况从选项之中选择变换公式(更特定而言,是从IWin向Win的变换所使用的变换公式)。在本实施方式中,上述选项包括以下所示的变换公式F1和F2。在蓄电池11的状态不包含于规定的第一状态的情况下,选择部611选择变换公式F1,在蓄电池11的状态包含于上述第一状态的情况下,选择部611选择变换公式F2。第一状态可以由用户任意设定。关于本实施方式所涉及的第一状态的详细情况将在后面叙述。变换公式F1和F2分别预先存储于存储装置60c(图2)。本实施方式所涉及的变换公式F1、F2可以分别视为本公开所涉及的“第一变换公式”、“第二变换公式”的一例。
Win=IWin×VBs…(F1)
Win=IWin×V1…(F2)
变换公式F1通过将VBs与IWin相乘来将IWin变换为Win。变换公式F1中的VBs表示由电池传感器12检测出的蓄电池11的电压的实测值。在本实施方式中,采用平均电池单元电压(例如,各电池单元111的电压的平均值)作为VBs。但是,并不限于此,也可以代替平均电池单元电压,采用最大电池单元电压(即,各电池单元111的电压中的最高的电压值)、最小电池单元电压(即,各电池单元111的电压中的最低的电压值)、或者电池组的端子间电压(即,在SMR14处于闭合状态时施加于外部连接端子T1、T2之间的电压)作为VBs。
变换公式F2通过将V1与IWin相乘来将IWin变换为Win。变换公式F2中的V1是流过与IWin相当的电流的状态下的蓄电池11的电压值。V1由第一推定部612推定。关于V1的推定方法将在后面叙述。本实施方式所涉及的V1可以视为本公开所涉及的“第一电压推定值”的一例。
选择部621构成为,根据状况从选项之中选择变换公式(更特定而言,是从IWout向Wout的变换所使用的变换公式)。在本实施方式中,上述选项包括以下所示的变换公式F3和F4。在蓄电池11的状态不包含于规定的第二状态的情况下,选择部621选择变换公式F3,在蓄电池11的状态包含于上述第二状态的情况下,选择部621选择变换公式F4。第二状态可以由用户任意设定。关于本实施方式所涉及的第二状态的详细情况将在后面叙述。变换公式F3和F4分别预先存储于存储装置60c(图2)。本实施方式所涉及的变换公式F3、F4可以分别视为本公开所涉及的“第三变换公式”、“第四变换公式”的一例。
Wout=IWout×VBs…(F3)
Wout=IWout×V2…(F4)
变换公式F3中的VBs与变换公式F1中的VBs相同。变换公式F4中的V2是流过与IWout相当的电流的状态下的蓄电池11的电压值。V2由第二推定部622推定。关于V2的推定方法将在后面叙述。本实施方式所涉及的V2可以视为本公开所涉及的“第二电压推定值”的一例。
运算部613使用由选择部611所选择的变换公式(在本实施方式中为变换公式F1、F2中的任一个)来将IWin变换为Win。在蓄电池11的状态不包含于第一状态的情况下,运算部613使用变换公式F1来将IWin变换为Win。运算部623使用由选择部621所选择的变换公式(在本实施方式中为变换公式F3、F4中的任一个)来将IWout变换为Wout。在蓄电池11的状态不包含于第二状态的情况下,运算部623使用变换公式F3来将IWout变换为Wout。
在蓄电池11的状态包含于第一状态的情况下,由选择部611选择变换公式F2,运算部613使用变换公式F2来将IWin变换为Win。此时,第一推定部612推定变换公式F2中的V1,并将推定出的V1输出给运算部613。图6是用于说明第一推定部612对V1的推定方法的图。
以下,有时将由电池传感器12检测出的蓄电池11(二次电池)的电流实测值、电压实测值记载为“实际电流”、“实际电压”。参照图5及图6,第一推定部612使用蓄电池11的实际电流和实际电压(即,由电池传感器12检测出的蓄电池11的电流和电压各自的实测值)、蓄电池11的内部电阻和IWin来取得V1。图6中的图表M11表示以下所示的关系式。
V1=VBs-(IWin-IB)×R
在上述关系式中,“R”表示内部电阻,“IB”表示实际电流,“VBs”表示实际电压。上述关系式中的VBs与变换公式F1中的VBs相同。上述关系式预先存储于存储装置60c(图2)。另外,上述关系式也可以包含规定的修正项(例如,与极化相关的修正项)。
在本实施方式中,第一推定部612参照映射图M2来取得蓄电池11的内部电阻。在映射图M2中,“R”表示内部电阻,“TB”表示蓄电池11的温度。映射图M2是表示蓄电池11的温度(TB)与蓄电池11的内部电阻(R)之间的关系的信息,预先存储于存储装置60c(图2)。第一推定部612能够根据蓄电池11的温度取得蓄电池11的内部电阻。内部电阻的取得所使用的蓄电池11的温度例如是由温度传感器12c检测出的蓄电池11的温度的实测值。例如,可以采用平均电池单元温度、最大电池单元温度以及最小电池单元温度中的任一个作为上述蓄电池11的温度。如映射图M2所示,存在蓄电池11的温度越高,蓄电池11的内部电阻越降低的倾向。
再次参照图5,在蓄电池11的状态包含于第一状态的情况下,由选择部611选择变换公式F2,第一推定部612如上述那样推定V1。然后,运算部613从第一推定部612接收V1,并使从电池包10(图4)输入的IWin乘以V1。这样,运算部613在蓄电池11的状态包含于第一状态的情况下,按照变换公式F2将IWin变换为Win。另一方面,在蓄电池11的状态不包含于第一状态的情况下,由选择部611选择变换公式F1,运算部613使用变换公式F1来将IWin变换为Win。运算部613能够使用电池传感器信号(特别是电压信号VB)来取得变换公式F1中的VBs。
变换公式F2使用根据实际电压和实际电流推定出的V1来将IWin变换为Win。在变换公式F2中,考虑到蓄电池11的电压根据电流的大小而变化的情况,在使用变换公式F2的变换中,能够以比使用变换公式F1的变换高的精度取得与IWin对应的Win。另一方面,由于变换公式F1直接使用实际电压,因此不进行复杂的运算就能够将IWin变换为Win。因此,与使用变换公式F2的变换相比,在使用变换公式F1的变换中,运算部613的运算负荷更小。
在蓄电池11的状态包含于第二状态的情况下,由选择部621选择变换公式F4,运算部623使用变换公式F4来将IWout变换为Wout。此时,第二推定部622推定变换公式F4中的V2,并将推定出的V2输出给运算部623。图7是用于说明第二推定部622对V2的推定方法的图。
参考图5及图7,第二推定部622使用蓄电池11的实际电流和实际电压(即,由电池传感器12检测出的蓄电池11的电流和电压各自的实测值)、蓄电池11的内部电阻和IWout来取得V2。图7中的图表M12表示以下所示的关系式。
V2=VBs+(IWout-IB)×R
在上述关系式中,“R”表示内部电阻,“IB”表示实际电流,“VBs”表示实际电压。上述关系式中的VBs与变换公式F1中的VBs相同。上述关系式预先存储于存储装置60c(图2)。另外,上述关系式也可以包含规定的修正项(例如,与极化相关的修正项)。
在本实施方式中,第二推定部622参照映射图M2来取得蓄电池11的内部电阻。图7所示的映射图M2与图6所示的映射图M2相同。第一推定部612和第二推定部622中的每一个也可以定期地检测实际电流和实际电压,并基于实际电流与实际电压之间的关系来修正映射图M2。另外,存储装置60c也可以将内部电阻作为固定值进行存储来代替映射图M2。
再次参照图5,在蓄电池11的状态包含于第二状态的情况下,由选择部621选择变换公式F4,第二推定部622如上述那样推定V2。然后,运算部623从第二推定部622接收V2,并使从电池包10(图4)输入的IWout乘以V2。这样,运算部623在蓄电池11的状态包含于第二状态的情况下,按照变换公式F4将IWout变换为Wout。另一方面,在蓄电池11的状态不包含于第二状态的情况下,由选择部621选择变换公式F3,运算部623使用变换公式F3来将IWout变换为Wout。运算部623能够使用电池传感器信号(特别是电压信号VB)来取得变换公式F3中的VBs。
变换公式F4使用根据实际电压和实际电流推定出的V2来将IWout变换为Wout。在变换公式F4中,考虑到蓄电池11的电压根据电流的大小而变化的情况,在使用变换公式F4的变换中,能够以比使用变换公式F3的变换高的精度取得与IWout对应的Wout。另一方面,由于变换公式F3直接使用实际电压,因此不进行复杂的运算就能够将IWout变换为Wout。因此,与使用变换公式F4的变换相比,在使用变换公式F3的变换中,运算部623的运算负荷更小。
再次参照图4,当从电池包10向网关ECU60输入了IWin、IWout以及电池传感器信号时,通过网关ECU60的变换部600(详细结构参照图5)将IWin及IWout分别变换为Win及Wout。从IWin向Win的变换在蓄电池11的状态包含于第一状态的情况下使用变换公式F2进行,在蓄电池11的状态不包含于第一状态的情况下使用变换公式F1进行。从IWout向Wout的变换在蓄电池11的状态包含于第二状态的情况下使用变换公式F4进行,在蓄电池11的状态不包含于第二状态的情况下使用变换公式F3进行。
网关ECU60将通过上述变换而取得的Win和Wout以及从电池包10所取得的电池传感器信号输出给HVECU50。网关ECU60从电池包10实时地逐次取得IWin、IWout、VBs,计算Win及Wout并向HVECU50发送。从网关ECU60向HVECU50发送的Win及Wout通过最新的IWin、IWout、VBs(即,实时值)而被逐次更新。如图2所示,网关ECU60和HVECU50通过CAN通信来交换信息。
HVECU50包括以下说明的控制部51。在HVECU50中,例如由图2所示的处理器50a和由处理器50a执行的程序来具体实现控制部51。但是,并不限于此,控制部51也可以通过专用的硬件(电子电路)来具体实现。
控制部51构成为使用Win来控制蓄电池11的输入功率。另外,控制部51构成为使用Wout来控制蓄电池11的输出功率。在本实施方式中,控制部51以使蓄电池11的输入功率及输出功率分别不超过Win及Wout的方式创建针对图1所示的MG21a、MG21b及发动机31的控制指令S
图8是表示本实施方式所涉及的车辆控制方法的处理步骤的流程图。通过该流程图所示的处理来控制蓄电池11的输入功率和输出功率。该流程图所示的处理例如每经过规定时间被从主例程(未图示)调出并反复执行。
参照图1及图8,在步骤(以下简单记为“S”)10中,HVECU50从网关ECU60取得Win,并设定Win。所设定的Win被保存于存储装置50c(图2)。图9是表示图8所示的S10的处理的详细情况的流程图。网关ECU60根据来自HVECU50的请求或周期性地执行图9所示的一系列的处理。
参照图1及图9,在S111中,网关ECU60从电池包10取得IWin和电池传感器12的检测值(即,表示电池状态的电池传感器信号)。在S112中,由网关ECU60判断车辆100中的蓄电池11的状态是否包含于规定的第一状态。在本实施方式中,将下述(A-1)和(A-2)所示的状态作为第一状态。
(A-1)在车辆100以规定速度以上的车速行驶的过程中通过从EV行驶转移到HV行驶来进行蓄电池11的再生充电的状态。以下,将从EV行驶转移到HV行驶的情况也称为“HV转移”。
(A-2)在车辆100以规定速度以上的车速行驶的过程中通过利用制动装置(未图示)进行车辆100的制动来进行蓄电池11的再生充电的状态。
以下,使用图1和图10,对上述(A-1)所示的电池状态进行说明。图10是表示上述(A-1)所示的电池状态下的行星齿轮42的太阳齿轮S、行星齿轮架C以及齿圈R各自的转速的关系的一例的共线图。参照图1及图10,在上述(A-1)所示的电池状态下,行星齿轮架C(进而为发动机31)和齿圈R分别处于正转状态,太阳齿轮S(进而为MG21a)处于负转状态。另外,在上述(A-1)所示的电池状态下,由于HV转移而在发动机31和齿圈R分别产生负转矩,从而向MG21a(MG1)作用反作用力转矩(即,正转矩)。在上述(A-1)所示的电池状态下,由于向负转状态的MG21a作用正转方向的转矩,因此MG21a作为发电机进行动作,由MG21a发电产生的电力被输入给蓄电池11。因此,在上述(A-1)所示的电池状态下,蓄电池11的输入功率(即,充电功率)容易急剧增加。
接着,参照图1,对上述(A-2)所示的电池状态进行说明。在上述(A-2)所示的电池状态下,当利用制动装置(未图示)进行车辆100的制动时,执行将MG21b(MG2)利用为发电机的再生制动,从而利用MG21b进行蓄电池11的再生充电。这样,在上述(A-2)所示的电池状态下,蓄电池11的输入功率(即,充电功率)也容易急剧增加。
再次参照图1及图9,在本实施方式中,在蓄电池11的状态为上述(A-1)和(A-2)中的任一状态时,在S112中判断为“是”(蓄电池11的状态包含于第一状态)。另一方面,在蓄电池11的状态不是上述(A-1)和(A-2)中的任何状态时,在S112中判断为“否”(蓄电池11的状态不包含于第一状态)。在进行上述(A-1)和(A-2)中的任一个所示的再生充电的期间,在S112中判断为“是”,当上述的再生充电结束时,在S112中判断为“否”。
当在S112中判断为“否”时,网关ECU60在S121中,将电池ECU13的采样率设定为规定的第一速率(以下记为“SP1”)之后,在S131中,使用上述的变换公式F1(图5)来将从电池包10(图4)输入的IWin变换为Win,并将该Win发送给HVECU50。另一方面,当在S112中判断为“是”时,网关ECU60在S122中,将电池ECU13的采样率设定为规定的第二速率(以下记为“SP2”)之后,在S132中,使用上述的变换公式F2(图5)来将从电池包10(图4)输入的IWin变换为Win,并将该Win发送给HVECU50。在本实施方式中,SP2比SP1高。
如上所述,在本实施方式中,在蓄电池11的状态不包含于第一状态的情况下(S112中为“否”),网关ECU60使用变换公式F1来将IWin变换为Win,在蓄电池11的状态包含于第一状态的情况下(S112中为“是”),网关ECU60使用变换公式F2来将IWin变换为Win。在蓄电池11的状态包含于第一状态的情况下,通过使用变换公式F2来代替变换公式F1进行变换,从而变换精度(即,从IWin向Win的变换精度)变高。另外,在本实施方式中,在蓄电池11的状态包含于第一状态的情况下(S112中为“是”),与蓄电池11的状态不包含于第一状态的情况(S112中为“否”)相比,提高电池ECU13的采样率(进而,提高每单位时间从电池ECU13向网关ECU60发送的电池传感器信号的数据数量)。在蓄电池11的状态包含于第一状态的情况下,通过使电池ECU13的采样率变高,变换精度也变高。
当通过图9的S131和S132中的任一处理,从网关ECU60向HVECU50发送了Win时,HVECU50设定从网关ECU60接收到的Win。通过在HVECU50中设定Win,图8的S10的处理结束,处理进入图8的S20。
在S20中,HVECU50从网关ECU60取得Wout,并设定Wout。所设定的Wout被保存于存储装置50c(图2)。图11是表示图8所示的S20的处理的详细情况的流程图。网关ECU60根据来自HVECU50的请求或周期性地执行图11所示的一系列的处理。图11所示的一系列处理可以与图9所示的一系列处理并行执行。
参照图1及图11,在S211中,网关ECU60从电池包10取得IWout和电池传感器12的检测值(即,表示电池状态的电池传感器信号)。在S212中,由网关ECU60判断车辆100中的蓄电池11的状态是否包含于规定的第二状态。在本实施方式中,将下述(B-1)~(B-3)所示的状态作为第二状态。
(B-1)在车辆100的车速为规定速度以下(包括“车速=0”的停车状态)时使用蓄电池11的电力来进行发动机31的起转的状态。
(B-2)通过使停止中的辅机70启动而开始从蓄电池11向辅机70供给电力的状态(更详细而言,为通过辅机70的启动而使向辅机70供给的电力上升直至电力的供给稳定为止的状态)。
(B-3)通过使工作中的辅机70停止而停止从蓄电池11向辅机70供给电力的状态(更详细而言,为通过辅机70的停止而使向辅机70供给的电力降低直至电力的供给停止的状态)。
以下,使用图1和图12,对上述(B-1)所示的电池状态进行说明。图12是表示上述(B-1)所示的电池状态下的行星齿轮42的太阳齿轮S、行星齿轮架C以及齿圈R各自的转速的关系的一例的共线图。参照图1和图12,在上述(B-1)所示的电池状态下,太阳齿轮S(进而为MG21a)、行星齿轮架C(进而为发动机31)和齿圈R分别处于正转状态。在上述(B-1)所示的电池状态下,由蓄电池11的电力驱动的MG21a进行发动机31的起转。由此,在MG21a产生正转矩,向发动机31和太阳齿轮S分别作用负转矩。蓄电池11的电力被MG21a消耗。因此,在上述(B-1)所示的电池状态下,蓄电池11的输出功率(即,放电功率)容易急剧增加。
另外,在低车速的情况下,MG21a(MG1)虽然瞬间经过负转及正转矩的状态(发电状态),但立即成为正转及正转矩的状态(放电状态)。另一方面,在高车速的情况下,即使发动机31启动,MG21a(MG1)也继续负转及正转矩的状态(发电状态)。
如上述(B-2)所示,当停止中的辅机70(例如空调装置)启动时,蓄电池11的电力被辅机70消耗。因此,在上述(B-2)所示的电池状态下,蓄电池11的输出功率(即,放电功率)容易急剧增加。另一方面,如上述(B-3)所示,当工作中的辅机70(例如空调装置)停止时,蓄电池11的电力不再被辅机70消耗。因此,在上述(B-3)所示的电池状态下,蓄电池11的输出功率(即,放电功率)容易急剧减少。
再次参照图1及图11,在蓄电池11的状态为上述(B-1)~(B-3)中的任一状态时,在S212中判断为“是”(蓄电池11的状态包含于第二状态)。另一方面,在蓄电池11的状态不是上述(B-1)~(B-3)中的任何状态时,在S212中判断为“否”(蓄电池11的状态不包含于第二状态)。
当在S212中判断为“否”时,网关ECU60在S221中,将电池ECU13的采样率设定为第三速率(以下记为“SP3”)之后,在S231中,使用上述的变换公式F3(图5)来将从电池包10(图4)输入的IWout变换为Wout,并将该Wout发送给HVECU50。另一方面,当在S212中判断为“是”时,网关ECU60在S222中,将电池ECU13的采样率设定为规定的第四速率(以下记为“SP4”)之后,在S232中,使用上述的变换公式F4(图5)来将从电池包10(图4)输入的IWout变换为Wout,并将该Wout发送给HVECU50。在本实施方式中,SP4比SP3高。SP3既可以与图9所示的SP1相同,也可以不同。SP4既可以与图9所示的SP2相同,也可以不同。
如上所述,在本实施方式中,在蓄电池11的状态不包含于第二状态的情况下(S212中为“否”),网关ECU60使用变换公式F3来将IWout变换为Wout,在蓄电池11的状态包含于第二状态的情况下(S212中为“是”),网关ECU60使用变换公式F4来将IWout变换为Wout。在蓄电池11的状态包含于第二状态的情况下,通过使用变换公式F4来代替变换公式F3进行变换,从而变换精度(即,从IWout向Wout的变换精度)变高。另外,在本实施方式中,在蓄电池11的状态包含于第二状态的情况下(S212中为“是”),与蓄电池11的状态不包含于第二状态的情况(S212中为“否”)相比,提高电池ECU13的采样率(进而,提高每单位时间从电池ECU13向网关ECU60发送的电池传感器信号的数据数量)。在蓄电池11的状态包含于第二状态的情况下,通过使电池ECU13的采样率变高,变换精度变高。
当通过图11的S231和S232中的任一处理,从网关ECU60向HVECU50发送了Wout时,HVECU50设定从网关ECU60接收到的Wout。通过在HVECU50中设定Wout,图8的S20的处理结束,处理进入图8的S30。
再次参照图1及图8,在S30中,HVECU50使用通过图9的处理所设定的Win来控制蓄电池11的输入功率,并且使用通过图11的处理所设定的Wout来控制蓄电池11的输出功率。更具体而言,HVECU50以使蓄电池11的输入功率及输出功率分别不超过Win及Wout的方式创建针对MG21a、MG21b以及发动机31的控制指令S
如以上所说明的那样,本实施方式所涉及的车辆100具备包括电池ECU13的电池包10、以及与电池包10分开设置的HVECU50和网关ECU60。网关ECU60构成为对电池ECU13与HVECU50之间的通信进行中继。电池包10构成为输出IWin和IWout。在网关ECU60搭载有变换部600。变换部600根据状况从选项(例如,图5所示的变换公式F1~F4)之中选择变换公式,并使用选择的变换公式来将IWin和IWout分别变换为Win和Wout。
上述车辆100通过具备变换部600,能够将从电流限制型的电池包(例如电池包10)输出的IWin及IWout分别变换为Win及Wout。因此,HVECU50能够使用Win及Wout适当地进行功率基准的输入限制和功率基准的输出限制。
在上述实施方式中,在蓄电池11的状态为上述(A-1)和(A-2)中的任一状态的情况下,大多要求严格控制蓄电池11的输入电流。因此,变换部600在蓄电池11的状态为上述(A-1)以及(A-2)中的任一状态的情况下(图9的S112中为“是”),选择变换精度高的变换公式F2,并使用变换公式F2来将IWin变换为Win。另外,在蓄电池11的状态为上述(B-1)~(B-3)中的任一状态的情况下,大多要求严格控制蓄电池11的输出电流。因此,变换部600在蓄电池11的状态为上述的(B-1)~(B-3)中的任一状态的情况下(在图11的S212中为“是”),选择变换精度高的变换公式F4,并使用变换公式F4来将IWout变换为Wout。通过使用变换精度高的变换公式F2、F4,能够以高精度进行向与IWin、IWout对应的Win、Wout的变换。通过使用与IWin、IWout对应的Win、Wout来控制电池功率,从而提高蓄电池11的电流的控制性。
在蓄电池11的状态不是上述(A-1)和(A-2)中的任何状态的情况下,大多不要求严格控制蓄电池11的输入电流。因此,在蓄电池11的状态不是上述(A-1)和(A-2)中的任何状态的情况下(在图9的S112中为“否”),变换部600选择运算负荷小的变换公式F1(即,变换精度低的变换公式),并使用变换公式F1来将IWin变换为Win。另外,在蓄电池11的状态不是上述(B-1)~(B-3)中的任何状态的情况下,大多不要求严格控制蓄电池11的输出电流。因此,变换部600在蓄电池11的状态不是上述的(B-1)~(B-3)中的任何状态的情况下(在图11的S212中为“否”),选择运算负荷小的变换公式F3(即,变换精度低的变换公式),并使用变换公式F3来将IWout变换为Wout。通过使用运算负荷小的变换公式F1、F3,能够减轻变换部600的运算负荷。
如上所述,本实施方式所涉及的变换部600能够根据状况使用适合的变换公式来进行从IWin、IWout向Win、Wout的变换。
车辆100中包含的控制部件也可以以规定的单位模块化而构成车辆控制系统。
图13是表示车辆控制系统的第一例的图。参照图13,车辆控制系统201通过将MG21a、21b、电动机传感器22a、22b、电动机ECU23、PCU24、发动机31、发动机传感器32、发动机ECU33、行星齿轮42、HVECU50、网关ECU60以及辅机70模块化而构成。车辆控制系统201构成为能够安装电池包10(图4)。
图14是表示车辆控制系统的第二例的图。参照图14,车辆控制系统202是从车辆控制系统201去除发动机控制部件(即,发动机31、发动机传感器32以及发动机ECU33)进行模块化所得的系统。车辆控制系统202构成为能够安装电池包10(图4)及上述发动机控制部件。
模块化所得的车辆控制系统可以作为一个部件进行处理。通过如上述那样将控制部件模块化,从而容易制造车辆。另外,能够在不同的车型中共用部件。
车辆控制系统201、202具备HVECU50和网关ECU60。HVECU50在电池包10(图4)安装于该车辆控制系统的情况下,以使蓄电池11的输入功率不超过Win的方式控制蓄电池11的输入功率,并且以使蓄电池11的输出功率不超过Wout的方式控制蓄电池11的输出功率。在车辆控制系统201、202中,HVECU50可以视为本公开所涉及的“控制部”的一例。网关ECU60的选择部611、621(图5)根据状况从选项(例如,图5所示的变换公式F1~F4)之中选择变换公式。网关ECU60的运算部613、623(图5)使用由选择部611、621所选择的变换公式,来将从电池包10输入的IWin、IWout变换为Win、Wout,并将所得到的Win、Wout输出给HVECU50。在车辆控制系统201、202中,网关ECU60可以视为本公开所涉及的“变换部”的一例。
另外,安装有电池包10的车辆控制系统201、202能够通过包括以下说明的第一至第四步骤的车辆控制方法来控制蓄电池11的输入功率及输出功率。
在第一步骤(例如,图9中的S111和图11中的S211)中,该车辆控制系统从电池包10取得IWin、IWout和电池传感器12的检测值(电池传感器信号)。在第二步骤(例如,图9中的S112和图11中的S212)中,该车辆控制系统从选项(例如,图5所示的变换公式F1~F4)之中选择变换公式。例如,在图9中的S112中判断为“是”时,选择变换公式F2,在图9中的S112中判断为“否”时,选择变换公式F1。另外,在图11中的S212中判断为“是”时,选择变换公式F4,在图11中的S212中判断为“否”时,选择变换公式F3。在第三步骤(例如,图9中的S131、S132以及图11中的S231、S232)中,该车控制系统使用通过第二步骤所选择的变换公式,来将从电池包10所取得的IWin和IWout分别变换为Win和Wout。在第四步骤(例如,图8中的S30)中,该车辆控制系统使用在第三步骤中所取得的Win和Wout,来控制蓄电池11的输入功率及输出功率。
根据上述车辆控制方法,车辆控制系统201、202能够以功率基准适当地对电流限制型的电池包10中包含的蓄电池11进行输入限制及输出限制。
在上述实施方式中,使电池ECU13的采样率可变,但电池ECU13的采样率也可以为恒定(固定值)。图9的处理中的S121和S122以及图11的处理中的S221和S222可以省略。
在上述实施方式中,将上述(A-1)和(A-2)所示的状态设为第一状态,并将上述(B-1)~(B-3)所示的状态设为第二状态。但是,第一状态和第二状态中的每一个可以任意设定。例如,可以仅将上述(A-1)和(A-2)中的任一方设为第一状态。另外,也可以仅将上述(B-1)~(B-3)中的任一个设为第二状态。
另外,第一状态可以是二次电池的输入功率(即,充电功率)急剧增加和/或减少的二次电池的状态(电池状态)。在这样的电池状态下,如果使用通过第一变换公式进行变换所得的第一功率上限值来进行功率基准的输入限制,则二次电池的输入电流容易变得过大或过小。第一状态也可以包括二次电池的充电功率由于再生充电而增加的电池状态(例如,通过紧急制动而进行再生充电的电池状态)。另外,第二状态可以是二次电池的输出功率(即,放电功率)急剧增加和/或减少的二次电池的状态(电池状态)。在这样的电池状态下,如果使用通过第三变换公式进行变换所得的第二功率上限值来进行功率基准的输出限制,则二次电池的输出电流容易变得过大或过小。例如,第二状态可以包括由二次电池的电力驱动的规定的辅机(例如,空调装置、照明装置或刮水器)的启动时或停止时的电池状态。另外,在HV(混合动力车)中,第二状态也可以包括使用二次电池的电力的发动机起转时(即,发动机启动时)的电池状态。
辅机70不限于空调装置,也可以包括由蓄电池11的电力驱动的其他辅机(例如,照明装置及刮水器中的至少一方)。也可以向辅机70供给比蓄电池11的电力低的电压的电力(例如,蓄电池11的电力由DC/DC变换器降压后的电力)。
在上述实施方式中,在将电流限制型的电池包连接到功率限制型的控制装置的情况下,通过采用网关ECU60,来对电流限制型的电池包中包含的二次电池进行功率基准的输入限制和功率基准的输出限制。即,在上述实施方式中,采用了构成为能够与电流限制型的电池包连接,并且不能与功率限制型的电池包连接的网关ECU60。但是,并不限于此,也可以采用图15所示的网关ECU60X来代替在上述实施方式中所采用的网关ECU60。图15是表示图4所示的网关ECU的变形例的图。
参照图15,网关ECU60X具备用于连接电池包10A的连接器C21和用于连接电池包10B的连接器C22。电池包10A是具备用于外部连接的连接器C11,并向连接器C11输出IWin、IWout及传感器信号的电流限制型的电池包。电池包10B是具备用于外部连接的连接器C12,并向连接器C12输出Win、Wout及电池传感器信号的功率限制型的电池包。另外,在网关ECU60X的输出端口C3经由信号线连接有HVECU50。
当电池包10A的连接器C11被连接到网关ECU60X的连接器C21时,IWin、IWout及传感器信号从电池包10A输入到连接器C21。然后,利用网关ECU60X的变换部600将IWin及IWout分别变换为Win及Wout,并将Win、Wout及传感器信号输出到输出端口C3。因此,从网关ECU60X向HVECU50输出Win、Wout及电池传感器信号。
另一方面,当电池包10B的连接器C12被连接到网关ECU60X的连接器C22时,Win、Wout及电池传感器信号从电池包10B输入到连接器C22。网关ECU60X将输入到连接器C22的Win、Wout及电池传感器信号直接输出到输出端口C3。即,不进行上述的变换。因此,从网关ECU60X向HVECU50输出Win、Wout及电池传感器信号。
如上所述,该变形例所涉及的网关ECU60X构成为,在被输入了IWin、IWout的情况下,进行基于由选择部611、621(图5)所选择的变换式的变换而输出Win、Wout,在被输入了Win、Wout的情况下,不进行上述的变换而输出Win、Wout。在具备这样的网关ECU60X的车辆中,无论在使用电流限制型的电池包10A的情况和使用功率限制型的电池包10B的情况中的哪一个情况下,均从网关ECU60X输出Win、Wout。因此,在这样的车辆中,无论在采用电流限制型的电池包10A和功率限制型的电池包10B中的哪一个的情况下,HVECU50均能够适当地进行功率基准的输入限制和功率基准的输出限制。
另外,在图15所示的例子中,网关ECU60X分别具备电流限制型的电池包用的输入端口(连接器C21)和功率限制型的电池包用的输入端口(连接器C22),但网关ECU也可以构成为能够以其他的方式与电流限制型的电池包和功率限制型的电池包这两者连接。例如,网关ECU可以具备与电流限制型的电池包和功率限制型的电池包这两者连接的一个输入端口。并且,也可以构成为,在电池包连接到该输入端口时的初始处理中,由网关ECU识别电池包是电流限制型/功率限制型中的哪一种。在连接到输入端口的电池包为电流限制型的情况下,网关ECU可以启动变换逻辑(例如,图15所示的变换部600),来将所输入的IWin及IWout分别变换为Win及Wout,并且将Win及Wout向输出端口输出。另一方面,在连接到输入端口的电池包是功率限制型的情况下,网关ECU可以不启动变换逻辑而将所输入的Win及Wout直接向输出端口输出。
在上述实施方式中,为了蓄电池11的输入限制而求出的功率上限值的数量为一个,为了蓄电池11的输出限制而求出的功率上限值的数量也为一个。但是并不限于此,可以使用多个功率上限值来进行输入限制,也可以使用多个功率上限值来进行输出限制。例如,也可以采用图16所示的HVECU50X,来代替在上述实施方式中所采用的HVECU50。图16是表示图4所示的HVECU50X的变形例的图。
参照图4及图16,HVECU50X的硬件结构与图2所示的HVECU50的结构相同。但是,HVECU50X除了控制部51以外还包括保护部53。在HVECU50X中,例如由图2所示的处理器50a和由处理器50a执行的程序来实现控制部51及保护部53。但是,并不限于此,上述各部也可以通过专用的硬件(电子电路)来具体实现。
例如,从图4所示的网关ECU60向HVECU50X输入Win、Wout及电池传感器信号。保护部53使用映射图M来求出表示蓄电池11的输入功率的上限值的第三功率上限值(以下有时记为“GWin”)、和表示蓄电池11的输出功率的上限值的第四功率上限值(以下有时记为“GWout”)。GWin是针对Win的保护值,在Win为异常值(更特定地是过大的值)时,代替Win来限制蓄电池11的输入功率。GWout是针对Wout的保护值,在Wout为异常值(更特定地是过大的值)时,代替Wout来限制蓄电池11的输出功率。
映射图M是表示蓄电池11的温度与GWin以及GWout中的每一个之间的关系的信息,被预先存储于存储装置50c(图2)。映射图M中的线L11表示蓄电池11的温度与GWin之间的关系。映射图M中的线L12表示蓄电池11的温度与GWout之间的关系。
保护部53参照映射图M来取得与当前的蓄电池11的温度相对应的GWin、GWout。然后,将Win和GWin中较小的一方向控制部51输出,并且将Wout和GWout中较小的一方向控制部51输出。例如,在映射图M中的蓄电池11的温度和Win为状态P11时将Win向控制部51输出,在为状态P12时将GWin(线L11)向控制部51输出。以下,有时将Win超过GWin的情况(例如,成为状态P12的情况)记载为“有Win保护”。另外,在映射图M中的蓄电池11的温度和Wout为状态P21时将Wout向控制部51输出,在为状态P22时将GWout(线L12)向控制部51输出。以下,有时将Wout超过GWout的情况(例如,成为状态P22的情况)记载为“有Wout保护”。
上述GWin、GWout的取得所使用的蓄电池11的温度例如是由图4所示的温度传感器12c检测出的蓄电池11的温度的实测值。例如,可以采用平均电池单元温度、最大电池单元温度以及最小电池单元温度中的任一个作为上述蓄电池11的温度。
除了上述功率上限值以外,电池传感器信号也被从保护部53向控制部51输出。控制部51使用从保护部53接收到的功率上限值来控制蓄电池11的输入功率及输出功率。更具体而言,控制部51以使蓄电池11的输入功率及输出功率中的每一个不超过功率上限值的方式创建针对图1所示的MG21a、MG21b以及发动机31的控制指令S
保护部53也可以将有Win保护和有Wout保护记录于存储装置50c(图2),并基于所记录的数据来判断搭载到车辆的电池包(例如,图4所示的电池包10)的适合/不适合。例如,保护部53可以在有Win保护的频度和有Wout保护的频度中的至少一方超过规定值时,判断为电池包不适合。另外,保护部53也可以在有Win保护的状态持续的时间和有Wout保护的状态持续的时间中的至少一方超过规定值时,判断为电池包不适合。
HVECU50X也可以将电池包的适合/不适合的判断结果记录于存储装置50c(图2)。另外,HVECU50X也可以在判断为电池包不适合的情况下,向用户报知该情况。通过该报知,可以催促用户更换电池包。向用户的报知处理是任意的,可以利用向显示装置的显示(例如文字或图像的显示)来通知,也可以通过扬声器利用声音(包括语音)来通知,还可以使规定的灯点亮(包括闪烁)。
根据上述图16所示的变形例,在由于某种原因Win、Wout成为过大的值时,能够利用GWin、GWout来保护蓄电池11。
在上述实施方式中,在网关ECU60搭载有变换部600。但是,并不限于此,也可以使其他的ECU具有这些功能。
图17是表示图4所示的车辆控制系统的第一变形例的图。参照图17,该变形例所涉及的车辆控制系统除了采用HVECU50Y来代替HVECU50,并省略了网关ECU60之外,与图4所示的车辆控制系统相同。HVECU50Y的硬件结构与图2所示的HVECU50的结构相同。但是,HVECU50Y除了控制部51以外,还具备上述变换部600(参照图5)。在HVECU50Y中,例如由图2所示的处理器50a和由处理器50a执行的程序来具体实现控制部51及变换部600。但是,并不限于此,上述各部也可以通过专用的硬件(电子电路)来具体实现。
电池包10将IWin、IWout及传感器信号向HVECU50Y输出。HVECU50Y的变换部600分别将从电池包10输入的IWin及IWout变换为Win及Wout。Win和Wout从变换部600输入到控制部51。控制部51以使蓄电池11的输入功率及输出功率分别不超过Win及Wout的方式创建针对图1所示的MG21a、MG21b以及发动机31的控制指令S
在上述变形例所涉及的车辆控制系统中,与电池包10分开设置的HVECU50Y包括变换器(即,变换部600),并利用变换器将IWin、IWout变换为Win、Wout。因此,能够在不变更电池包10的结构的前提下,将变换器搭载于车辆。另外,能够在不追加上述的网关ECU60(图4)的前提下,由HVECU50Y适当地进行功率基准的输入限制和功率基准的输出限制。
图18是表示图4所示的车辆控制系统的第二变形例的图。参照图18,该变形例所涉及的车辆控制系统除了采用电池包10X(包括电池ECU13X)来代替电池包10(包括电池ECU13),并省略了网关ECU60之外,与图4所示的车辆控制系统相同。电池包10X中包含的电池ECU13X的硬件结构与图2所示的电池ECU13的结构相同。但是,电池ECU13X除了IWin运算部131和IWout运算部132之外,还具备上述变换部600(参照图5)。在电池ECU13X中,例如通过图2所示的处理器13a和由处理器13a执行的程序来具体实现IWin运算部131、IWout运算部132以及变换部600。但是,并不限于此,上述各部也可以通过专用的硬件(电子电路)来具体实现。
电池ECU13X的变换部600从IWin运算部131及IWout运算部132接收IWin及IWout,并将IWin及IWout变换为Win及Wout。电池包10X将Win、Wout及电池传感器信号向HVECU50输出。HVECU50的控制部51以使蓄电池11的输入功率及输出功率分别不超过Win及Wout的方式创建针对图1所示的MG21a、MG21b以及发动机31的控制指令S
在上述变形例所涉及的车辆控制系统中,在电池ECU13X(即,在电池包10X的内部)集成变换器(即,变换部600)。在这样的结构中,能够在电池包10X的内部将IWin及IWout变换为Win及Wout,并从电池包10X输出Win及Wout。因此,能够在不追加上述的网关ECU60(图4)的前提下,由HVECU50适当地进行功率基准的输入限制和功率基准的输出限制。
在上述实施方式和各变形例中,以基于二次电池的输入限制的方式进行二次电池的输出限制,但也可以以与二次电池的输入限制和二次电池的输出限制不同的方式进行。例如,可以在从IWin向Win的变换中,使用从包括两个以上的变换公式(例如,图5所示的变换公式F1及F2)的选项中所选择的一个变换公式,在从IWout向Wout的变换中,始终使用一个变换公式(例如,图5所示的变换公式F3或F4)。另外,也可以在从IWout向Wout的变换中,使用从包括两个以上的变换公式(例如,图5所示的变换公式F3及F4)的选项中所选择的一个变换公式,在从IWin向Win的变换中,始终使用一个变换公式(例如,图5所示的变换公式F1或F2)。
在上述实施方式及各变形例中,在局部总线B1连接有电池ECU13、电动机ECU23及发动机ECU33(参照图2)。但是,并不限于此,电动机ECU23及发动机ECU33也可以与全局总线B2连接。
车辆的结构并不限于图1所示的结构。例如,在图1中示出了混合动力车,但车辆并不限定于混合动力车,也可以是未搭载发动机的电动汽车。另外,车辆也可以是构成为能够使用从车辆外部供给的电力来对电池包内的二次电池进行充电的PHV。另外,HVECU50也可以构成为不经由电池ECU13而直接控制SMR14。另外,电池包10中包含的蓄电池11(二次电池)并不限于电池组,也可以是单电池。
本公开的第三控制装置也能够使用于上限值的变换(即,从电流上限值向功率上限值的变换)之外的目的。第三控制装置也可以构成为,进行信息的管理(例如,车辆数据的蓄积)。另外,第三控制装置也可以作为CGW(中央网关)发挥功能。
上述的各种变形例也可以任意组合来实施。应当认为本次公开的实施方式在所有方面均是例示,而不是限制性的。本发明的范围并不是上述的实施方式的说明,而是由请求保护的范围表示,并且意在包括与请求保护的范围等同的含义和范围内的所有改变。
- 车辆用控制装置、车辆用控制系统、车辆用控制方法及车辆用控制系统的控制方法
- 车辆的控制系统、车辆的控制系统的控制方法、车辆以及计算机可读记录介质