一种基于机器视觉的水面垃圾收集分类装置及方法
文献发布时间:2023-06-19 11:47:31
技术领域
本发明涉及收集垃圾、垃圾分类技术领域,尤其涉及一种基于机器视觉的水面垃圾收集分类装置及方法。
背景技术
随着人们生活水平的不断提高,人类活动所产生的垃圾日渐增多,其中水面垃圾的面积不断增大,水体污染日益严重,严重威胁着水生生物的健康,水面垃圾造成的影响会通过各种途径影响到人类的健康,人类在有水面垃圾的水面的活动日益艰难,因此要设法将水面垃圾清除。
对水面的垃圾进行分类与陆地上的垃圾分类主要区别在于,目前陆地上的垃圾分类回收已经全面展开,但回收效果非常差,给后续处理带来了巨大压力;对水面垃圾进行分类,则可以直接对刚从水面收集上来的垃圾进行分类,大大减轻了垃圾分类回收处理的压力。
目前人们普遍通过人工乘船打捞,工作时存在诸多弊端,人工打捞垃圾费时费力,不宜长时间、无间断地打捞水面垃圾,且在一些高度危险的水域并不适合人类前往打捞垃圾;人工打捞上来的垃圾要分类处理的话要耗费工人更大的精力,因此人工打捞上来的垃圾几乎不能对其进行分类,导致打捞上来的水面垃圾不能及时处理以致水面垃圾只是离开了水面,而人类无法对水面垃圾进行回收利用、销毁等正确的处理,费时做了“无用功”。为了减少水面污染,维护人类正常的活动,急需一种可以对水面垃圾进行收集和分类的机器来代替人类对水面垃圾的收集。
发明内容
为解决上述技术问题,本发明的目的是提供一种基于机器视觉的水面垃圾收集分类装置及方法,该装置与方法解决了传统的水面垃圾收集装置工作流程繁杂而引起的能源损耗过多,以及回收的水面垃圾不能进行分类或分类不彻底的问题。
本发明的目的通过以下的技术方案来实现:
一种基于机器视觉的水面垃圾收集分类装置,包括支架(1)、引流装置(2)、传送带组、震动装置(4)、垃圾分类装置(5)和分类垃圾桶(6);
所述支架(1)安装于船舶上,用于支撑整个收集分类装置;
所述引流装置(2)置于支架(1)上,用于引导水面垃圾流向传送带组;
所述传送带组包括最终传送带(32)、近水传送带(33)和传送带电机(31),并通过近水传送带(33)将水面垃圾传送至震动装置(4);
所述震动装置(4)通过快速震动将接收到的垃圾震散并输送至垃圾分类装置(5);
垃圾分类装置(5)通过图像处理将垃圾分类,并规划垃圾在最终传送带(32)上的路线后对垃圾进行分类操作,由最终传送带(32)将分类后的垃圾传送进入分类垃圾桶(6)中。
一种基于机器视觉的水面垃圾收集分类方法,包括:
将水面垃圾收集分类装置置于船舶上,启动后引流电机带动变距螺旋桨转动引起水体流向近水传送带,近水传送带将接收到的垃圾向上传送至震动板;
震动板接收垃圾,震动板持续震动将垃圾震散并使垃圾单个地进入到最终传送带上;
垃圾刚进入最终传送带的中间通道时,位于最终传送带上的相机对进入最终传送带上的垃圾进行图像采集,工控机中的图像处理子系统根据已有的算法对图像进行处理并将垃圾分类;
工控机结合最终传送带速度确认垃圾位置,且工控机中的自适应控制子系统设计每一个垃圾所需经过的通道,后将设计好的通道信息转换成所需分类门的状态信号,并将分类门应开启或关闭的状态信号反馈给分类门;
当工控机自适应控制子系统发出两分类门都是开启状态时垃圾继续从中间的通道通过,工控机自适应控制子系统发出右边分类门为关闭状态时垃圾进入左边的通道;该操作完成后工控机自适应控制子系统立即发出下一个状态信息控制右边分类门的状态,分类垃圾经过最终传送带的传送,进入分类垃圾桶。
与现有技术相比,本发明的一个或多个实施例可以具有如下优点:
由于引流装置设置了可变距螺旋桨,可改变一定的垃圾收集方向,因此基于机器视觉的水面垃圾收集分类方法可在一个固定的地方大面积地回收水面垃圾,节省了不断移动垃圾收集器所带来的不便和能源损耗;
震动装置、最终传送带和分类装置配合工作可对收集上来的水面垃圾进行分类处理,将水面垃圾正确地投放到相应的分类垃圾桶中,省去再加工,使水面垃圾回收后可对其进行再利用。
附图说明
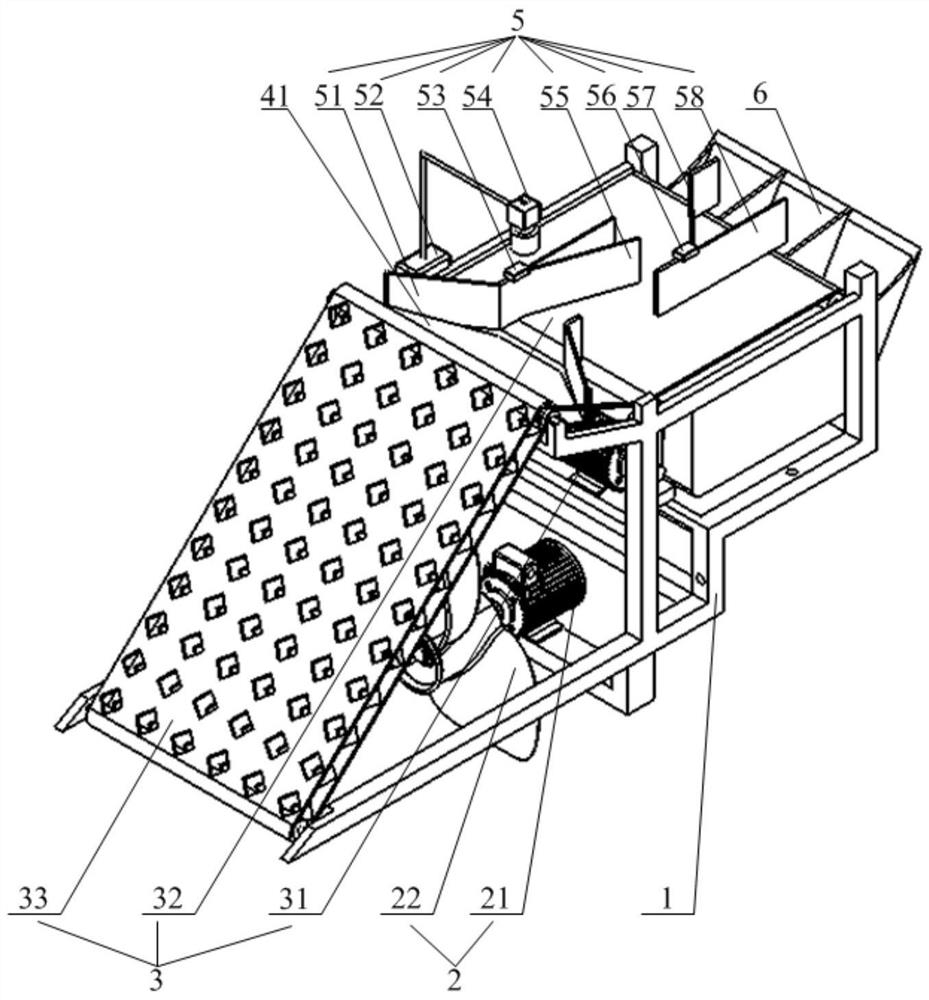
图1是基于机器视觉的水面垃圾收集分类装置结构示意图;
图2是基于机器视觉的水面垃圾收集分类装置结构正视图;
图3是基于机器视觉的水面垃圾收集分类装置工作原理图;
图4是基于机器视觉的水面垃圾收集分类方法流程图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合实施例及附图对本发明作进一步详细的描述。
实施例1
如图1和图2所示,为基于机器视觉的水面垃圾收集分类装置结构,包括支架1、引流装置2、传送带组、震动装置4、垃圾分类装置5和分类垃圾桶6;
所述支架1安装于船舶上,用于支撑整个收集分类装置;所述引流装置2置于支架1上,用于引导水面垃圾流向传送带组;所述传送带组3包括最终传送带32、近水传送带33和传送带电机31,并通过近水传送带33将水面垃圾传送至震动装置4;所述震动装置4通过快速震动将接收到的垃圾震散并输送至垃圾分类装置5;垃圾分类装置5通过图像处理将垃圾分类,并规划垃圾在最终传送带32上的路线后对垃圾进行分类操作,由最终传送带32将分类后的垃圾传送进入分类垃圾桶6中。
支架1左端、下部呈阶梯状,可装配在船舶上。
所述引流装置2设置于分类垃圾桶6右下侧、近水传送带33下方,由变距螺旋桨22和引流电机21组成;引流电机21水平放置于支架上,引流电机21右侧与变距螺旋桨22相连接,所述引流电机21用于启动变距螺旋桨22转动,以引导水体流带动水面垃圾向近水传送带33靠近,通过近水传送带33将接收到的垃圾向上传送。引流装置2部分浸入水中,引流电机21做防水处理。
传送带电机31设置在最终传送带32的下方,可为最终传送带32和近水传送带33提供动力。传送带电机31做防水处理
震动装置4包含震动板41和震动电机42;并由震动电机42的持续震动带动震动板41快速震动,将垃圾震散并快速进入最终传送带32的中间通道;震动板41为倾斜放置,与倾斜放置的近水传送带33的区别是震动板左端低于右端,右端连接近水传送带33,略低于近水传送带33,所述震动电机42紧贴于震动板底面中央,震动板41底面靠近近水传送带的两角固连弹簧,弹簧另一端固连支架1。最终传送带32水平放置于与震动板41左端等高位置,且震动板41与最终传送带32右端平滑连接,最终传送带32左端与支架1平齐。
所述近水传送带33斜置于支架1的右侧,且左端高于右端,右端延伸入水,左端与震动板41相连接且高于震动板41。
所述垃圾分类装置包括分类门、分隔板、相机54及工控机52;所述相机54拍下进入最终传送带32上的垃圾,工控机52中的图形处理子系统根据已有的算法对图像进行处理并将垃圾分类;以及结合最终传送带32的速度确认垃圾位置。
所述分隔板包括第一分隔板51和第二分隔板58;所述分类门包括第一分类门55和第二分类门57;所述第一分隔板51和第二分隔板58设置于最终传送带32上表面,第一分隔板51置于外侧,第二分隔板58置于内侧;第一分类门55设置在第一分隔板51上,第二分类门57设置在第二分隔板58上;在第一分类门55关闭时垃圾通道位于第二分隔板58上,第二分类门57关闭时垃圾通过的通道位于第一分隔板51上。在第一分类门55门轴处紧贴第一分类门驱动装置53,第二分类门57门轴处紧贴第二分类门驱动装置56;
所述相机54安装于最终传送带32最右端正上方第一分隔板55和第二分隔板58之间,由支架1支撑;工控机52安装于最终传送带32靠近震动装置的一侧支架1上,工控机52中设置有自适应控制子系统,并通过自适应控制子系统设置每一个垃圾所需经过的通道,然后将设计好的通道信息转换成分类门的状态信号并将分类门应开启或关闭的状态信号反馈给分类门。
所述分类垃圾桶6共分为三个,可设置为三类不同种类的垃圾桶,分类垃圾桶6设置在最终传送带32最左侧的下方且并排分布,通过垃圾分类装置5的不同类别垃圾可以分别进入不同类别的垃圾桶中,因此可根据垃圾分类装置5的通道设定来确定三个垃圾桶的类型。
当工控机自适应控制子系统发出第一分类门55和第二分类门57都是开启状态时,垃圾从中间通道通过;
当工控机自适应控制子系统发出指令控制第二分类门为关闭状态时,垃圾进入左侧通道502,在该操作完成后,工控机自适应控制子系统立即发出下一状态信息控制第二分类门57的状态,以保证下一垃圾的正确传送;
当工控机自适应控制子系统发出指令控制第一分类门55为关闭状态时,垃圾进入右侧通道503,在该操作完成后,工控机自适应控制子系统立即发出下一状态信息控制第一分类门55的状态,以保证下一垃圾的正确传送。
如图4所示,本实施例还提供了一种基于机器视觉的水面垃圾收集分类方法,包括:
1)将水面垃圾收集分类装置置于船舶上,并开到有水面垃圾的水域,并给水面垃圾收集分类装置供电;启动后引流电机带动变距螺旋桨转动引起水体流向近水传送带,使近水传送带正对水面垃圾将接收到的垃圾向上传送至震动板;
启动引流装置的引流电机起引流作用的变距螺旋桨提供动力,变距螺旋桨旋转引导水体流向近水传送带;
启动传送带电机为最终传送带和近水传送带提供动力,近水传送带将接触到带面的水面垃圾向上传送,带动水面垃圾进入震动装置。
2)震动板接收垃圾,震动板持续震动将垃圾震散并使垃圾单个地进入到最终传送带上;
所述垃圾在挡板的作用下,逐个、快速地进入最终传送带。
3)垃圾刚进入最终传送带的中间通道时,位于最终传送带上的相机对进入最终传送带上的垃圾进行图像采集,工控机中的图像处理子系统根据已有的算法对图像进行处理并将垃圾分类;
上述步骤3具体包括:水面垃圾进入最终传送带,也就进入了垃圾分类装置的作用范围,通过相机实时采集垃圾图像,然后通过通信接口传输到工控机中的图象处理子系统进行分析处理。
4)工控机结合最终传送带速度确认垃圾位置,且工控机中的自适应控制子系统设计每一个垃圾所需经过的通道,后将设计好的通道信息转换成所需分类门的状态信号,并将分类门应开启或关闭的状态信号反馈给分类门;
5)当工控机自适应控制子系统发出两分类门都是开启状态时垃圾继续从中间的通道通过,工控机自适应控制子系统发出右边分类门为关闭状态时垃圾进入左边的通道;该操作完成后工控机自适应控制子系统立即发出下一个状态信息控制右边分类门的状态,分类垃圾经过最终传送带的传送,进入分类垃圾桶。
上述方法还包括:工控机自适应控制子系统发出左边分类门为关闭状态时垃圾进入右边的通道,该操作完成后工控机自适应控制子系统立即发出下一个状态信息控制左边的分类门的状态,以保证下一个垃圾的正确传送,分类垃圾经过最终传送带的传送,进入分类垃圾桶。
循环执行上述操作,且引流装置中的变距螺旋桨实时改变桨叶螺距,改变引导水体流动方向、引导垃圾,直至将该水域水面垃圾完全收集。
实施例2
本实施例与第第一实施例雷同,不同之处在于:
当本装置引流装置2引导水面垃圾接近近水传送带33时、近水传送带33传送水面垃圾至震动装置4进行分散处理,最终垃圾单一地进入垃圾分类装置5处理范围。
如图3所示,的垃圾分类装置结构,第一分类门55所示状态为第一分类门关闭状态,第二分类门57关闭时也是阻断中间通道,来自震动装置的水面垃圾刚进入最终传送带32,垃圾分类装置对垃圾进行分类操作,垃圾分类装置的工作流程为:
1、垃圾分类装置中的相机对垃圾实时成像,并通过通信接口传输到工控机中的图象处理子系统该系统根据已有算法对相机拍摄的垃圾图片进行图像处理,假定垃圾排列为最复杂的情况:有害垃圾-有害垃圾-可回收垃圾-可回收垃圾-不可回收垃圾-不可回收垃圾并排进入最终传送带上的中间通道。
2、暂时假定中间通道为通道501,左侧通道502和右侧通道503,靠近左侧通道502的分类门为第一分类门,靠近右侧通道503的分类门为第二分类门,且设定中间通道501为可回收垃圾通道,右侧通道503为不可回收垃圾通道,左侧通道502为有害垃圾通道。垃圾会先遇到第一分类门55,后遇到第二分类门57。
3.当上述垃圾进入垃圾分类装置且工控机52已经根据算法完成图像处理时,工控机52根据最终传送带32的速度来设计分类门的开启或关闭:
(1).当有害垃圾移动到第一分类门55时工控机52自适应控制子系统根据已有算法控制第一分类门55保持开启状态,有害垃圾继续沿中间通道501移动;
(2).紧挨着有害垃圾的可回收垃圾到达第一分类门55时也继续沿着中间通道501移动;
(3).不可回收垃圾到达第一分类门55,工控机52自适应控制子系统控制第一分类门55变为关闭状态,关闭状态持续到两个不可回收垃圾沿分类门进入到不可回收通道即右侧通道503,完成此操作后第一分类门55立即开启,从关闭状态到开启完成时所需时间很小,可忽略不计;
(4).各类垃圾继续向分类垃圾桶6移动;
(5).当有害垃圾到达第二分类门57,工控机52自适应控制子系统控制第二分类门57立即关闭,有害垃圾沿第二分类门57进入左侧通道502,第二分类门57关闭状态持续到两个有害垃都进入左侧通道502,完成此操作后第二分类门57立即开启,使可回收垃圾继续沿中间通道501移动。
(6).垃圾分类操作完成。
垃圾分类操作完成之后,垃圾继续沿最终传送带32进入到分类垃圾桶6中。
一直执行上述操作,且引流装置2中的变距螺旋桨22实时改变桨叶螺距,引导水体流动方向来吸引垃圾,直至将该水域水面垃圾完全收集。
虽然本发明所揭露的实施方式如上,但所述的内容只是为了便于理解本发明而采用的实施方式,并非用以限定本发明。任何本发明所属技术领域内的技术人员,在不脱离本发明所揭露的精神和范围的前提下,可以在实施的形式上及细节上作任何的修改与变化,但本发明的专利保护范围,仍须以所附的权利要求书所界定的范围为准。
- 一种基于机器视觉的水面垃圾收集分类装置及方法
- 一种基于机器视觉的可回收垃圾自动分类回收装置与方法