一种垂直起降固定翼无人机机场着陆方法
文献发布时间:2023-06-19 11:49:09
技术领域
本发明属于无人机领域,具体涉及一种垂直起降固定翼无人机机场着陆方法。
背景技术
无人机机场,也称无人机机库或无人机蜂巢。是指专为无人机设计的停放场所。无人机存储在机场内部,机场部署在作业所在区域,实现作业现场无人值守,无人机自动巡飞作业、自动降落、快速充换电高频常态飞行、数据智能识别等功能,解决了无人机巡检中遇到的人员编制不足、通勤成本高、时效性差、手工操控难度高、巡检数据应用不便等问题。
新兴的无人机机场技术,目前在国外鲜少报道,在国内随着工业无人机的深入研究,有关于无人机机场的升降装置,恒温装置以及自动充换电装置具有初步研究。目前有关于无人机机场的产品主要与旋翼无人机结合,提供巡检服务。但是旋翼无人机续航时间短,为实现长距离巡检,机场数目较多,后期运维压力大。垂直起降固定翼无人机既具有旋翼无人机对于起降场地要求低的特点,也具有固定翼无人机巡航时间长的优点。目前有关于垂直起降固定翼无人机机场报道较少。
发明内容
本发明的目的在于克服上述不足,提供一种垂直起降固定翼无人机机场着陆方法,用于解决现有技术中垂直起降固定翼无人机起降作业需要人工操作,自动化程度低的缺点。
为了达到上述目的,本发明包括以下步骤:
S1,无人机根据剩余续航里程和空闲机场的距离确定着陆机场;
S2,无人机进近到着陆机场上空;
S3,实时采集离地高度和着陆机场上的着陆标识,根据着陆标识得到横向偏移量;
S4,将离地高度和横向偏移量结合自抗扰控制算法使无人机降落到无人机机场上。
S1中,无人机剩余续航里程为A米,垂直起降固定翼无人机与空闲机场的距离为B
S2的具体方法如下:
以固定翼模式飞往着陆机场上空50米,并切换为旋翼状态,关闭前推电机;
在旋翼模式下固定速率下降到机场上空20米。
S3中,采用激光雷达测量离地高度。
S3中,采用视觉识别着陆机场上的着陆标识。
S4中,自抗扰控制算法的具体如下:
自抗扰控制中跟踪微分器定义为:
其中,v为北东地坐标系三轴的期望位置,v
自抗扰中扩展状态观测器定义为:
其中,y为北东地坐标系三轴的实际位置,z
自抗扰控制中非线性反馈控制率为:
其中,u为控制量,fhan函数为最速控制综合函数,c和h
与现有技术相比,本发明能够根据无人机的剩余续航里程和空闲机场的距离,实现自主选取空闲机场,将离地高度和横向偏移量结合自抗扰控制算法使无人机精准降落到无人机机场上,降低无人机操作人员的工作量,提高无人机作业的效率。
附图说明
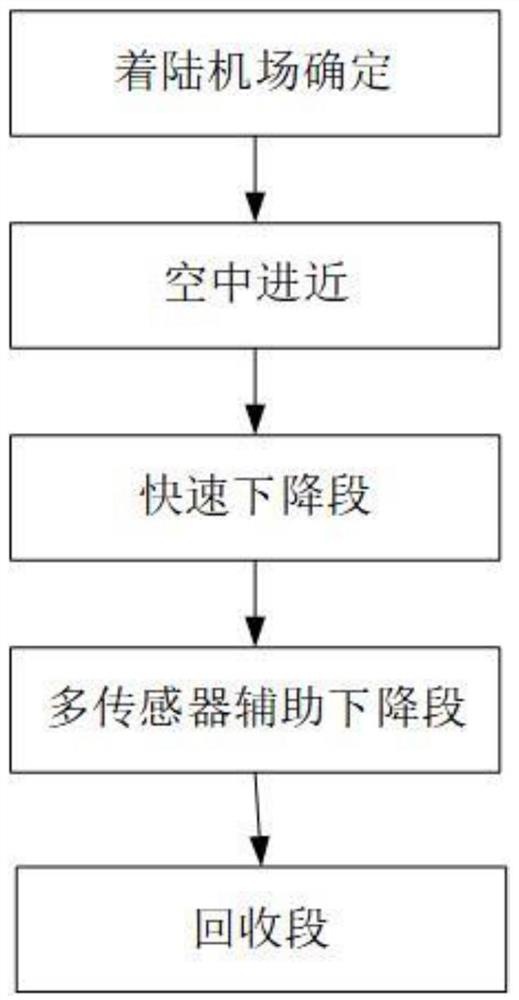
图1为本发明的控制流程图。
具体实施方式
下面结合附图对本发明做进一步说明。
参见图1,本发明包括以下步骤:
步骤1、着陆机场确定:垂直起降固定翼无人机空中任务执行完成后,根据自身剩余续航里程和周围空闲机场的距离确定着陆机场。
假设垂直起降固定翼无人机剩余续航里程为A米,垂直起降固定翼无人机与空闲机场的距离为B
步骤2、空中进近:根据步骤1所确定的机场,以固定翼模式飞往机场上空50米,并切换为旋翼状态,关闭前推电机。
步骤3、快速下降段:垂直起降固定翼无人机在旋翼模式下以5米每秒下降到机场上空20米。
步骤4、多传感器辅助下降段:采用激光雷达测量离地高度,采用视觉识别机场上着陆标识,无人机飞控得到精确地离机场高度以及横向偏移,通过自抗扰控制算法使无人机降落到无人机机场上。
自抗扰控制中跟踪微分器定义为:
其中,v为北东地坐标系三轴的期望位置,v
自抗扰中扩展状态观测器定义为:
其中,y为北东地坐标系三轴的实际位置,z1,z2,z3分别为扩展观测器观测到的位置,速度以及三轴方向的干扰,β
自抗扰控制中非线性反馈控制率设计为:
其中,u为控制量,fhan函数为最速控制综合函数,c和h
步骤5、回收段:将机场停机坪下落,舱门关闭。
- 一种垂直起降固定翼无人机机场着陆方法
- 一种垂直起降固定翼无人机智能机场系统