一种测厚仪爬行探头装置
文献发布时间:2023-06-19 11:50:46
技术领域
本发明涉及一种测厚仪爬行探头装置,用于密闭空间、受限空间、高空及高处作业检测,准确测量标的物厚度。
背景技术
测厚仪工作原理超声波测厚仪主要有主机和探头两部分组成。主机电路包括发射电路、接收电路、计数显示电路三部分,由发射电路产生的高压冲击波激励探头,产生超声发射脉冲波,脉冲波经介质介面反射后被接收电路接收,测厚仪通过单片机计数处理后,经液晶显示器显示厚度数值,它主要根据声波在试样中的传播速度乘以通过试样的时间的一半而得到试样的厚度。在役设备、管道、容器大部分存在:(1)密闭空间;(2)受限空间;(3)高空及高处作业等不可达的检测地点。
因此,针对许多检测工作现场无法手动测厚的弊端,根据受检部件的不可达位置特点等,设置爬行探头装置,可响应检测时机要求,提高检测工作效率、降低工业安全风险隐患等。
发明内容
为解决上述问题,方便现场检测工作,规范测厚仪测量工作过程,本发明提供了一种测厚仪爬行探头装置。
本发明采用如下技术方案来实现的:
一种测厚仪爬行探头装置,包括爬行轮子、伸缩探头、爬行载体、探头稳定器、探头连接线和测厚仪;其中,爬行轮子位置爬行载体的上、下、左、右四点均衡分布,伸缩探头位于爬行载体中心,探头稳定器围绕于伸缩探头,探头连接线的一端位于爬行载体下端中央处,并连接伸缩探头,探头连接线的另一端连接测厚仪。
本发明进一步的改进在于,在爬行期间伸缩探头能够隐藏到爬行载体内,当爬行到达预设位置固定后,伸缩探头伸出来执行测厚工作。
本发明进一步的改进在于,伸缩探头被探头稳定器环绕,当伸缩探头伸出来后,探头稳定器实现固定、稳定探头作用。
本发明进一步的改进在于,爬行载体下端中央处连接探头连接线,爬行载体内部的探头线连接伸缩探头。
本发明进一步的改进在于,爬行载体配有遥控器,遥控器用于指挥爬行载体活动。
本发明进一步的改进在于,爬行载体内部设置与遥控器无线连接,遥控器能指挥爬行载体、爬行轮子和伸缩探头活动。
本发明进一步的改进在于,伸缩探头采用OLYMPUS品牌,规格为φ6、7.5MHZ;φ10、5MHZ。
本发明进一步的改进在于,测厚仪采用OLYMPUS品牌,型号为45MG,测量仪器精度为0.01mm。
本发明至少具有如下有益的技术效果:
本发明提供的测厚仪爬行探头装置,可根据不同受检对象的空间特点进行测量,减少密闭空间、受限空间、检测不可达部位、高空、高处危险作业的手动检测。
具体的,可根据不同的高度,路程,路径去灵活变动。
进一步,可通过爬行载体达到预设检测位置后,爬行轮子对爬行载体进行整体固定,伸缩探头伸出来稳定之后,对检测部位进行测厚,测得该部位的数据直接在测厚仪上显示。
附图说明
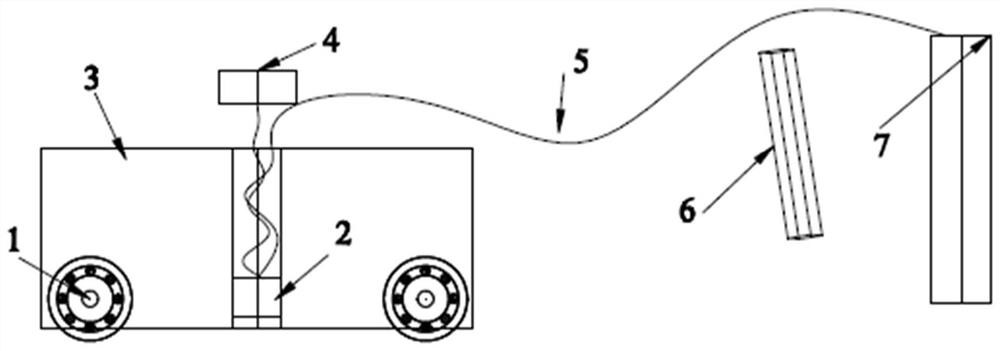
图1为测厚仪爬行探头装置主视图;
图2为测厚仪爬行探头装置左视图;
图3为测厚仪爬行探头装置三维透视图。
附图标记说明:
1为爬行轮子;2为伸缩探头;3为爬行载体;4为探头稳定器;5为探头连接线;6为遥控器;7为测厚仪。
具体实施方式
以下结合附图对本发明做出进一步的说明。
应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
在本发明中,在未作相反说明的情况下,使用的方位词如“上”、“下”、“左”、“右”通常是用图1中的方向为基准进行描述的;
本发明中,并未固定爬行轮子、伸缩探头、爬行载体、探头稳定器、探头连接线和遥控器等部件的数量、尺寸、刻度、材质等信息,使用时可参考工作需要合理规划;
如图1所示,本发明提供的测厚仪爬行探头装置,包括爬行轮子1、伸缩探头2、爬行载体3、探头稳定器4、探头连接线5、遥控器6和测厚仪7。
如图1所示,伸缩探头在爬行期间会隐藏到爬行载体内,当爬行到达预设位置固定后,探头伸出来执行测厚工作。
如图1所示,伸缩探头被探头稳定器环绕,当探头伸出来后,探头稳定器可以充分发挥固定、稳定探头作用。
如图1所示,爬行载体配有遥控器,爬行载体内部设置与遥控器具备无线连接,遥控器能指挥、控制爬行载体、爬行轮子、伸缩探头等一切活动。
如图1所示,爬行载体的下端中央处连接探头线,爬行载体内部的探头线连接伸缩探头,探头线的另一端连接测厚仪。
伸缩探头2具有伸缩功能,在不工作和爬行期间,伸缩探头都隐藏在爬行载体内部,只有当工作时候,爬行载体到达预先指定的被测物体表面的位置后,遥控指示伸缩探头伸出来直到与被测物体的表面紧贴后才不再伸缩,遥控器指示探头稳定器工作就把伸缩探头稳定固定在此处,使伸缩探头不再能伸缩,而是和被测物体的表面紧紧贴在一起。此时伸缩探头测得的厚度数据会通过探头线传输到测厚仪,测厚仪上的屏幕会显示所测得的厚度数据。
伸缩探头2采用OLYMPUS品牌,规格为φ6、7.5MHZ;φ10、5MHZ。
测厚仪7采用OLYMPUS品牌,型号为45MG,测量仪器精度为0.01mm。
本发明的工作原理或者工作过程如下:
测厚仪爬行探头装置工作原理是超声波测厚仪主要有测厚仪主机、伸缩探头、爬行轮子、爬行载体、探头稳定器、探头连接线、遥控器、七部分组成。而测厚仪主机电路又包括发射电路、接收电路、计数显示电路三部分。
首先,遥控器指挥爬行载体向被测物体预定的位置爬行,当爬行载体到达预先指定的被测物体位置后就立即停止爬行;
然后,遥控器指示隐藏在爬行载体内部的伸缩探头,伸缩探头伸出来直到探头触碰到被测物体的表面,便紧紧贴合被测物体的表面不再伸缩,遥控器指示探头稳定器工作就把伸缩探头稳固、定在此处不动,使伸缩探头不再能伸缩,而是和被测物体的表面紧紧贴在一起;
最后,测厚仪主机电路中由发射电路产生的高压冲击波激励伸缩探头,产生超声发射脉冲波,脉冲波经介质介面反射后被接收电路接收,测厚仪通过单片机计数处理后,经液晶显示器显示厚度数值,它主要根据声波在试样中的传播速度乘以通过试样的时间的一半而得到试样的厚度。
虽然,上文中已经用一般性说明及具体实施方案对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
- 一种测厚仪爬行探头装置
- 一种X射线测厚仪探头固定装置