一种具有整筐旋转搬移功能的组培苗上架机器人
文献发布时间:2024-01-17 01:13:28
技术领域
本发明涉及植物栽培领域,特别是涉及一种具有在窄空间内整筐旋转搬移功能的组培苗上架机器人。
背景技术
作为现代生物工程的基础,组织培养技术是农业高新技术中最重要、最活跃的领域之一,目前组织培养广泛应用于苗木、花卉、蔬菜等植物的大量繁殖,在世界范围内已进入大规模生产应用阶段,国内对组培技术领域的经费投入也不断增加。
组培筐是组织培养的重要容器,用于植物的无土栽培。在实际操作过程中,植物在育苗、生长、繁殖等各阶段需要移动到不同位置,目前主要依靠人工将整筐组培苗分层放置在组培架。由于组培架过高,人工上架时存在安全隐患,并且人工成本在组培苗相关研究中占比越来越大,削弱了组培苗在市场上的竞争力。
发明内容
本发明的目的是克服上述背景技术中的不足,提供一种具有整筐旋转搬移功能的组培苗上架机器人,该机器人应能实现整筐组培苗分层上架,并具有节省人力、降低成本、效率高、安全系数大的特点。
本发明的技术方案是:
一种具有整筐旋转搬移功能的组培苗上架机器人,包括装载组培筐的升降车;其特征在于:所述升降车上分别设有抓取并调整组培筐方向的转向机构、带动转向机构水平移动的平移机构、带动转向机构竖直移动的升降机构。
所述升降机构包括升降电机、与升降车车体固定的机架、可竖直滑动地定位在机架两侧的升降平台、连接升降平台的悬吊组件、连接升降电机与其中一个悬吊组件的第一传动组件、连接两个悬吊组件的第二传动组件;升降电机通过第一传动组件、悬吊组件以及第一传动组件、第二传动组件、悬吊组件带动两侧的升降平台同步运动。
所述平移机构包括可水平滑动地定位在两侧升降平台之间的平移平台、与升降平台固定的平移电机、传递平移电机动力驱动平移平台水平移动的平移传动组件。
所述转向机构包括可转动地定位在平移平台下方并且两端设有抓钩的转向平台、调整转向平台方向的转向传动组件、驱动两侧抓钩反向平移的电推杆。
所述悬吊组件包括可转动地定位在机架一侧并且上下布置的滑轮与卷筒、一端缠绕在卷筒上并且另一端绕过滑轮后与升降平台固定的升降绳;所述升降平台通过直线导轨模组可竖直滑动地定位在机架侧面。
所述第一传动组件包括与升降电机转轴固定的第一主动齿轮、与其中一个卷筒转轴固定的第一被动齿轮、连接第一主动齿轮与第一被动齿轮的第一传动链条;所述第二传动组件包括与各卷筒转轴固定的第二传动齿轮以及连接两个第二传动齿轮的第二传动链条。
所述平移平台通过滑轨可水平滑动地定位在升降平台上;所述平移传动组件包括与平移电机转轴固定的平移齿轮以及与平移齿轮啮合的平移齿条。
所述转向传动组件包括齿条模组、与转向平台转轴固定并与齿条模组的齿条啮合的转向齿轮。
所述升降车为剪式升降车。
本发明的有益效果是:
本发明用于组培苗工厂整筐组培苗的分层上架,可适应在窄空间行走并将整筐组培苗安全、稳定地放置在组培架中;其中的升降车将组培筐托起上升,转向机构抓取组培筐并调整其方向,升降机构与平移机构将组培筐送入组培架的对应层板上,实现了组培筐的自动化整筐旋转搬移与上架,提升了操作的安全系数,提高了工作效率,降低了成本。
附图说明
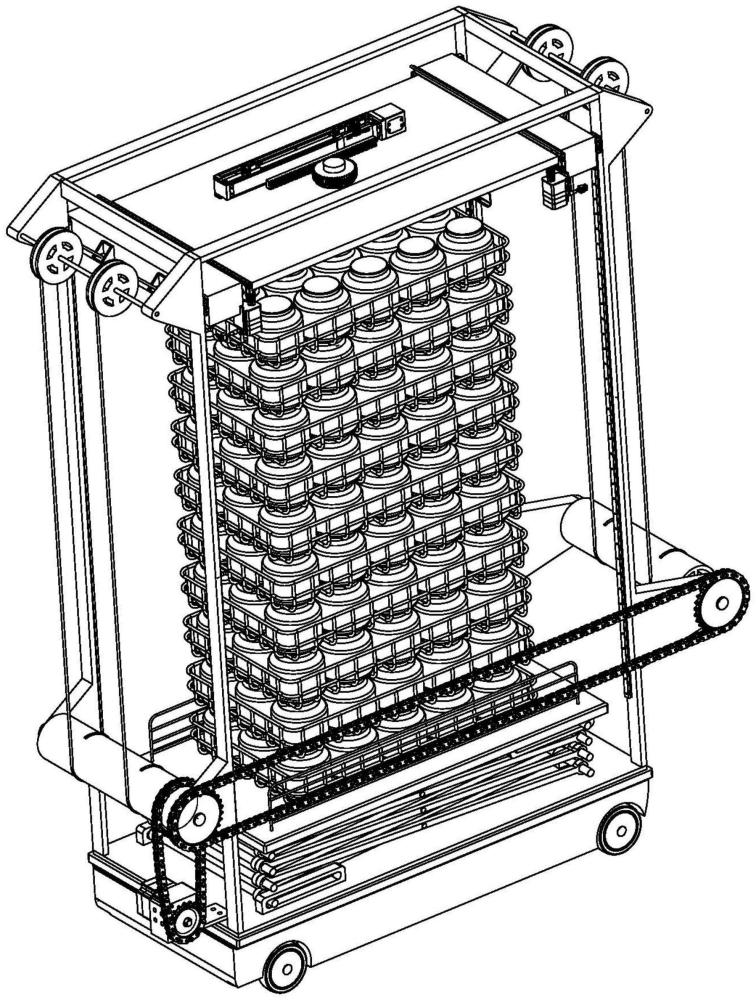
图1是本发明的立体结构示意图之一(平移机构未伸出)。
图2是本发明的立体结构示意图之二(平移机构未伸出)。
图3是本发明的主视结构示意图。
图4是本发明的升降机构的立体结构示意图之一。
图5是本发明的升降机构的立体结构示意图之二。
图6是本发明的平移机构的立体结构示意图。
图7是本发明的转向机构的主视结构示意图。
图8是本发明的转向机构的立体结构示意图。
图9是本发明的升降机构、平移机构、转向机构的立体结构示意图。
图10是本发明的立体结构示意图之三(平移机构伸出)。
图中标号:
升降车01、组培苗02、升降机构03、转向机构04、平移机构05、组培筐06、机架0301、升降平台0302、钢缆固定块0303、滑轮固定块0304、滑轮轴0305、升降绳0306、卷筒固定块0307、卷筒轴0308、第二传动链条0309、电机固定座0310、第一主动齿轮0311、升降电机0312、第一传动链条0313、第一被动齿轮0314、卷筒0315、直线导轨模组0316、滑轮0317、第二传动齿轮0320、平移平台0401、齿条模组0402、抓钩滑块0403、电推杆0404、转向平台0405、转向轴0406、抓钩0407、转向齿轮0408、转向轴承0409、滑槽0410、平移电机固定座0501、滑轨0502、齿条0503、平移齿轮0504、平移电机0505、轨道加宽板0506、第一轨道0511、第二轨道0512、第三轨道0513。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
如图1所示,一种具有整筐旋转搬移功能的组培苗上架机器人,包括升降车01、转向机构04、平移机构05、升降机构03。
所述升降车为现有技术。所述升降车采用剪式升降车,包括车体0101、起升台0102、剪式支架0103、油缸(图中省略)。所述升降车用于装载组培筐,组培筐逐层堆叠在起升台上(图1至图3显示共堆叠10层组培框),图3的水平方向为组培筐的长度方向,组培筐需要转动90度后才能放入组培架中,组培筐平行摆放在组培架的层板上,以节省空间。
所述转向机构用于抓取组培筐并且调整组培筐的方向,平移机构用于带动转向机构水平移动从而将组培筐放入组培架中(组培筐先水平移出升降车,在调整高度后再水平移入组培架),升降机构用于带动转向机构竖直移动以调整组培筐的高度。
所述升降机构包括升降电机0312、机架0301、升降平台0302、悬吊组件、第一传动组件、第二传动组件。所述升降电机与机架固定在升降车的车体上,机架为框架结构,机架与车体的四角固定,机架包围住升降车的起升台与剪式支架,机架的顶部高于起升台的最高起升位置,电机通过电机固定座0310与车体固定。
如图3所示,机架的左右两侧均设有升降平台,升降平台通过直线导轨模组0316可竖直滑动地定位在机架侧面,升降平台与直线导轨模组的滑块固定,直线导轨模组的导轨与机架固定,每个升降平台均配有一个悬吊组件,两个悬吊组件之间通过第二传动组件连接,升降电机与其中一个悬吊组件之间通过第一传动组件连接。升降电机通过第一传动组件、悬吊组件以及第一传动组件、第二传动组件、悬吊组件分别带动两侧的升降平台同步运动。
所述悬吊组件包括滑轮0317、卷筒0315、升降绳0306。所述滑轮与卷筒上下布置,卷筒通过卷筒转轴0308可转动地定位在机架的卷筒固定块0307上,两个滑轮通过同一滑轮轴0305可转动地定位在机架的滑轮固定块0304上,每个滑轮上配有一条升降绳,升降绳的一端缠绕在卷筒上并且另一端绕过滑轮后与升降平台的钢缆固定块0303固定,同一悬吊组件的两条升降绳在卷筒上的缠绕方向相同。
所述第一传动组件包括第一主动齿轮0311、第一被动齿轮0314、第一传动链条0313。第一主动齿轮与升降电机转轴固定,第一被动齿轮与其中一个卷筒转轴固定(图中显示该卷筒转轴位于升降电机上方),第一传动链条同时连接第一主动齿轮与第一被动齿轮。所述第二传动组件包括第二传动链条0309以及两个第二传动齿轮0320,每条卷筒转轴上固定一个第二传动齿轮,第二传动链条同时连接两个第二传动齿轮。所述第一传动组件与第二传动组件均设置在机架的前方(图3为前方),机架的前方面对组培架。
作为优选,为保证升降电机能同时带动左右两侧的卷筒(图3的左右两侧)同时转动,两侧的卷筒应同时按照顺/逆时针转动,而为了使两侧升降平台升降时始终位于同一水平高度,右侧的卷筒固定块水平长度比左侧的卷筒固定块长度略长,以确保滑轮与卷筒之间的升降绳始终为竖直状态。两侧悬吊组件的升降绳在卷筒上的缠绕方向相同。
所述平移机构包括平移平台0401、平移电机0505、平移传动组件。所述平移平台设置在两侧的升降平台之间,平移平台与升降平台之间设有滑轨0502以引导平移平台水平移动,每个升降平台上固定一个平移电机,平移电机通过平移电机固定座0501与升降平台固定,平移电机通过平移传动组件驱动平移平台水平移动。
所述滑轨为三段式,包括第一轨道0511、第二轨道0512、第三轨道0513。所述第一轨道与升降平台固定,第二轨道可轴向滑动地定位在第一轨道上,第三轨道可轴向滑动地定位在第二轨道上,平移平台与两侧的第三轨道固定。
所述平移传动组件包括与平移电机转轴固定的平移齿轮0504以及与平移齿轮啮合的平移齿条0503。所述平移齿条0503包括第一平移齿条050301与第二平移齿条050302,第一平移齿条050301通过轨道加宽板0506与第二轨道固定(调整第一平移齿条的位置,使同一侧的第一平移齿条与第二平移齿条在同一竖直平面中),第二平移齿条与第三轨道固定;平移齿轮与第一平移齿条、第二平移齿条啮合,保证第三轨道、第二轨道依次伸出。
所述滑轨具有锁定功能,该锁定功能为活动锁定,即拉力达到一定数值时,锁定解除使得滑轨伸出。滑轨未伸出时,平移齿轮只与第二平移齿条啮合,需要滑轨伸出时,平移电机启动,平移齿轮先通过第二平移齿条推动第三轨道伸出,第二轨道与第一轨道之间保持锁定,第二轨道不伸出,当第一轨道完全伸出时,平移齿轮还与第二平移齿条啮合,第二轨道与第一轨道之间的锁定接触因此第二轨道也向外伸出,第二轨道伸出一定长度后,平移齿轮再与第一平移齿条啮合(此时平移齿轮同时与第一平移齿条、第二平移齿条啮合),第二轨道继续伸出一定长度后,平移齿轮脱离第二平移齿条且只与第一平移齿条啮合,平移齿轮通过第二平移齿条推动第二轨道继续移动直至第二轨道完全伸出。滑轨收回时反向操作即可。
所述转向机构包括转向平台0405、抓钩0407、转向传动组件、电推杆0404。所述转向平台可转动地定位在平移平台下方,转向传动组件用于调整转向平台方向,转向平台的两端设有抓钩与电推杆,电推杆用于驱动抓钩反向平移。所述转向平台上设有转向轴0406,转向轴通过转向轴承0409可转动地定位在平移平台上,转向平台的两端设有径向延伸的滑槽0410(两端的滑槽共线),抓钩的顶端向上穿过滑槽后通过抓钩滑块0403与电推杆的伸缩杆固定(抓钩滑块可滑动地定位在滑槽中),抓钩的底端设有用于钩拉组培筐边沿的弯钩。
所述转向传动组件包括齿条模组0402与转向齿轮0408。所述齿条模组带有电机以及在电机驱动下进行水平移动的齿条,转向齿轮与转向平台转轴固定并与齿条啮合。作为优选,齿条的齿数为转向齿轮齿数的一半,以确保齿条模组驱动齿条从一端移动到另一端时,转向平台刚好转动90度。
本发明的各部件均为现有技术。本发明还包括控制器,控制器电连接升降车、升降电机、平移电机、齿条模组、电推杆。
本发明的工作原理是:
1、图2所示,将装有组培苗02的组培筐06叠放在升降车的起升台上;
2、升降车行驶到组培架前,升降车的前方面向组培架;
3、起升台上升一定高度,将最上层的组培筐抬升到合适位置;
4、升降机构驱动转向机构下降一定高度,电推杆驱动两侧的抓钩靠拢从而钩住组培筐,升降机构驱动转向机构上升一定高度将组培筐抬起,转向机构再驱动组培筐转动90度调整其方向;
5、平移机构将组培筐水平移出机架,升降机构将组培筐移动到组培架的对应层板高度,平移机构再将组培筐水平移入组培架中;
6、转向机构、平移机构、升降机构复位。
最后,需要注意的是,以上列举的仅是本发明的具体实施例。显然,本发明不限于以上实施例,还可以有很多变形。本领域的普通技术人员能从本发明公开的内容中直接导出或联想到的所有变形,均应认为是本发明的保护范围。
- 一种具有夹紧取料功能的升降式机器人旋转机构
- 一种具有培苗保护功能的组培瓶
- 一种具有抱抓功能的组培苗移栽手爪