基于时延估计模糊观测器反步法的二阶终端滑模控制方法
文献发布时间:2024-04-18 19:44:28
技术领域
本发明属于高阶机械臂轨迹跟踪技术领域,更为具体的涉及一种基于时延估计模糊观测器反步法的二阶终端滑模控制方法。
背景技术
随着控制理论及机械技术的发展,时延估计方法已经有了30年的历史,被不少学者证明出是一种简单而又鲁棒的控制方法,广泛运用于,外骨骼系统,水下机器人等,但是机械臂系统是一个复杂的非线性模型,同时由于模型参数不可能准确测量从而造成建模和仿真的失配,而且实际控制中模型会受到外界未知干扰的影响,用时延估计和补偿机械臂未知动态参数和外界干扰,再结合观测器进行扰动误差追踪,成为热点研究方向。
反演法在实现不确定非线性系统,特别是当干扰不确定性或不满足匹配条件时,鲁棒控制或自适应控制方面有着明显的优越性。但是由于反演法本身对虚拟控制求导过程中引起的项数膨胀以及由项数膨胀引起的问题没有很好的解决方法,在高阶系统中,这个缺点尤为突出。基于项数膨胀的问题,采用动态滑模面的控制方法,利用一阶积分滤波器计算虚拟控制导数,消除微分项的膨胀。对于高精度要求的柔性机械臂系统,非匹配扰动、响应时间的长短、跟踪误差的大小均不可忽略。
发明内容
本发明目的在于克服现有技术的不足,提供了一种基于时延估计模糊观测器反步法的二阶终端滑模控制方法。
本发明提供了一种基于时延估计模糊观测器反步法的二阶终端滑模控制方法,并应用于实际操作机械臂中,具体设计方案如下:
步骤一:通过时延估计来对系统的运动学和动力学参数进行估计。
步骤二:基于步骤一的模型,设计一个预估干扰的新型模糊观测器。
步骤三:基于步骤二中的新型模糊观测器中设定一个自适应律保证系统的稳定性。
步骤四:设定新型的非奇异性二阶终端滑模面结合前者步骤中观测器估计的干扰,利用反演控制的方法构建力矩,同时利用李雅普诺夫去证明系统的稳定性。
进一步地优选,所述步骤1中建立运动学方程:
其中:
在实际运行过程中,往往精确模型很难获取,在系统中N
其中定义
其中
进一步地优选,所述步骤2的具体步骤如下,将系统转化为如下形式:
考虑如下n阶非线性系统
通过上述系统设计新型观测器
其中定义
其中
新型观测器再利用极点配置技术设计增益参数,方法如下:
(s+w
w
用模糊系统的观测器误差
THEN y(z)is B
其中l
同时引入权重系数向量θ和模糊基向量的
定义
权重系数的设定为:
其中β为正常数,
进一步地优选,所述步骤三和步骤四中,定义
其中k
其中定义:
将上述式子改写为:
其中
采取反步法设计系统的控制输入:
其中A
本发明采用以上技术方案,实现了以下有益效果:
(1)本发明将时延估计与机械臂动力学模型进行结合,可以更好模拟机械臂在实际工作中的运行状态,基于此模型设计控制器可以有效地提高控制精度。
(2)将二阶滑模结合于积分项,可以在极短的时间内实现误差收敛,同时相对于其他控制方法具有更小的稳态误差,增加瞬态响应和降低稳态误差。
(3)采用新型模糊降阶观测器,对集总干扰和关节速度进行估计。避免了关节速度信息难以测量的问题,同时通过态观测器对干扰的前馈补偿,有效的避免了抖振现象。
(4)基于反演法设计控制输入的力矩,可以实现基于李雅普诺夫的全局渐进稳定,解决了快速终端滑模中的奇异性问题。
附图说明
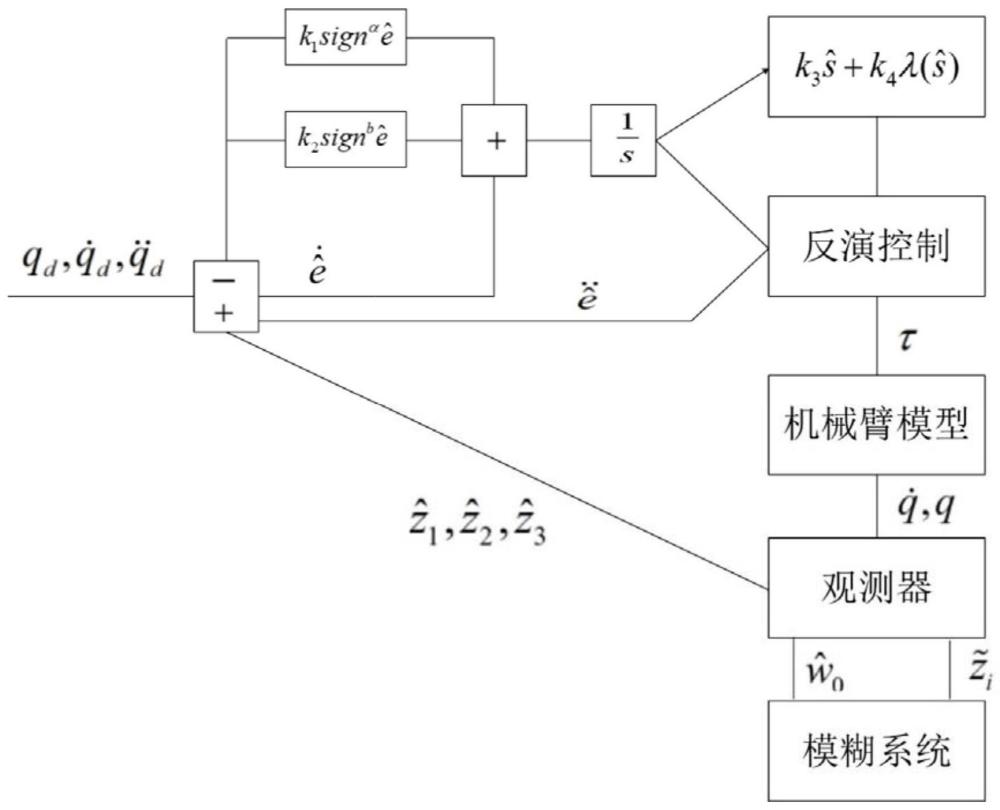
图1是本发明中控制器的结构框图;
图2是本发明实施例中二连杆刚性机械臂力矩模型示意图;
图3和图4为机械臂两个关节的力矩的仿真图;
图5-8为机械臂两个关节对比不同算法的位置,速度,的期望与误差估计仿真示意图;
图9-12为对比不同的算法,机械臂两关节位的位置与速度误差仿真对比示意图;
图13-14为机械臂两关节对比不同算法的力矩仿真示意图;
图15-16展现出不同观测器对比测量外部扰动的示意图;
具体实施方式
下面结合具体实施例,进一步阐明本发明,为了更好的说明本发明,采用matlab数值仿真对所提出的控制器进行验证,结果如图1至14所示。具体步骤如下:
步骤1,建立时延估计结合的机械臂动力学模型,模型如下:
其中:
在实际运行过程中,往往精确模型很难获取,在系统中N
其中定义
其中
步骤2的具体步骤如下,将系统转化为如下形式:
考虑如下n阶非线性系统
通过上述系统设计新型观测器
其中定义
其中
新型观测器再利用极点配置技术设计增益参数,方法如下:
(s+w
w
用模糊系统的观测器误差
THEN y(z) is B
其中l
同时引入权重系数向量θ和模糊基向量的
定义
权重系数的设定为:
其中β为正常数,
步骤三和步骤四中,定义
其中k
其中定义:
将上述式子改写为:
其中
采取反步法设计系统的控制输入:
其中A
设定的力矩如下:
本发明在MATLAB2018a环境下,应用simulink对二关节机械臂对本发明所设计的基于模糊降阶观测器的反步法的非奇异快速终端滑模控制器进行仿真验算并与一些其他控制算法(自适应反演NFTSM控制器ABNFTMSC,自适应积分滑模控制器(AISMC),自适应非奇异二阶快速终端滑模控制器(SONFTSM),相对比:
(1)仿真参数如下
机械臂动力学模型参数如下:
m
g=9.8m/s
令机械臂关节的初始位置和初始角速度分别为
对系统施加的干扰如下:
控制器参数设计如下:
图3-4机械臂两个关节的力矩的仿真图,可以看出,本发明中的两个机械臂均信号是连续的,并且无期奇异性的,且抖振较少。
图5-8为机械臂两个关节的位置,速度,期望与误差估计仿真示意图,由图可以看出,本发明中的两个机械臂的稳态误差非常小,体现了本发明高跟踪精度的优点。
图9-12为对比不同的算法,机械臂两关节位的位置与速度误差仿真对比示意图,由图可以看出,本发明中的两个关节的控制输入均保持连续,未发生抖振现象,并且精确度更高。
图13-14为对比不同控制方法的力矩示意图,本发明力矩更密集,稳定,抖振更少。
图15-16展现出不同观测器测量外部扰动的示意图,展现出本发明的观测器能更快更精准的跟踪。
综上所述,本发明所设计的控制方案只需要关节位置信息就可以使机械臂在短时间内实现对期望轨迹的高精度跟踪,针对干扰也表现出强鲁棒性,具有全局渐近稳定性。
上述具体实施案例,只是为了便于本研究领域的人员理解本发明,但本发明并不只适用于案例中的情况,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的。