适用于多种规格大体积放射性废物桶的剂量率测量方法
文献发布时间:2024-04-18 19:44:28
技术领域
本发明属于放射性剂量测量技术领域,具体涉及一种适用于多种规格大体积放射性废物桶的剂量率测量方法。
背景技术
现有的核电厂、核燃料元件厂、后处理厂等核设施运行或退役期间存在大体积桶装放射性废物的测量问题。核设施产生的固体放射性废物主要包括技术废物、废树脂、浓缩液等,贮存在大体积的200L或400L钢桶或水泥桶内,并在核设施内暂存,根据国家标准GB11806-2019《放射性物品安全运输规程》中关于剂量率测量的要求,在废物桶运输时,需要给出废物桶的表面剂量率和1m处剂量率,一般要求废物桶外表面上任一点的剂量率不超过2mSv/h,特殊情况下不超过10mSv/h,相关核设施以此为限值对大体积放射性废物桶进行管理。
根据国家标准EJ 1042-2014《低、中水平放射性固体废物容器钢桶》,不同规格型号的放射性废物桶尺寸有差异,现有常用的是200L或400L的废物桶,一般由工作人员对每个不同尺寸的废物桶逐一扫描测量。由于废物桶产生量较大、人工测量方式精度不高、放射性水平较高的废物桶存在辐射防护问题。
发明内容
本发明的目的是提供适用于多种规格大体积放射性废物桶的剂量率测量方法,解决辐射探测领域中大体积桶装放射性废物的测量问题。
本发明的技术方案如下:适用于多种规格大体积放射性废物桶的剂量率测量方法,包括如下步骤:
步骤1:将200L或400L废物桶放置于装载平台指定位置;
步骤2:利用对废物桶尺寸的识别结果,在测控软件中选择对应尺寸废物桶的扫描模式;
步骤3:在测控软件中点击“开始测量”,经过“配置参数确认”后,各剂量率仪完成废物桶表面和1m位置处剂量率测量;
步骤4:数据分析;
步骤5:扫描流程完成,样品搁置底座和各剂量率仪定位单元自动复位,通过抱夹车卸载废物桶。
所述的步骤1通过抱夹车将200L或400L废物桶放置于装载平台,利用样品搁置底座不同凹槽宽度和深度的设计,将200L或400L废物桶放置于指定位置。
所述的步骤2包括,
对于内径560mm,壁厚1.2mm,高900mm的200L钢桶,顶部和侧面剂量率仪分别移动至距桶顶面和桶侧面50mm~150mm处,并且,侧面上部剂量率仪可实现200L桶600mm~900mm高度范围移动,侧面中部剂量率仪可实现200L桶300mm~600mm高度范围移动,侧面下部剂量率仪可实现200L桶0mm~300mm高度范围移动,1m处剂量率仪移动至距200L桶壁1m位置,其且可实现200L桶400mm~600mm高度范围移动。
所述的步骤2包括,
对于内径700mm,壁厚2mm,高1132mm的400L钢桶,顶部和侧面剂量率仪分别移动至距桶顶面和桶侧面50mm~150mm处,并且,侧面上部剂量率仪可实现400L桶760mm~1140mm高度范围移动,侧面中部剂量率仪可实现400L桶380mm~760mm高度范围移动,侧面下部剂量率仪可实现400L桶0mm~380mm高度范围移动,1m处剂量率仪移动至距400L桶壁1m位置,其且可实现400L桶400mm~600mm高度范围移动。
所述的步骤4包括记录各剂量率仪测量数据的平均值和最大值。
本发明的有益效果在于:本发明通过可装卸200L和400L等不同尺寸大体积放射性废物桶的装载平台,实现不同尺寸废物桶的精确定位、判别、旋转和称重。本发明的装置及方法操作方便,测量精度高,实现自动化测量可提高扫描效率和测量精度,降低工作人员所受辐射剂量,降低核设施工作人员集体剂量。
该方法中装载平台可实现不同规格废物桶自动识别与定位,根据废物桶规格尺寸的识别结果,自动完成不同规格废物桶参数调用,以及表面剂量率和1m处剂量率的测量。
附图说明
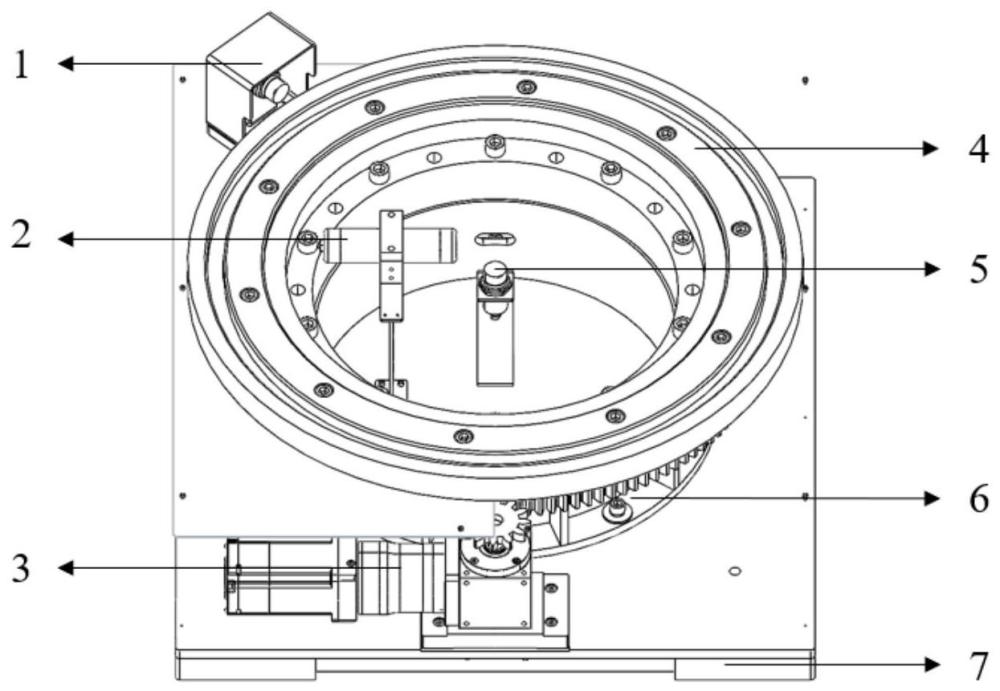
图1本发明所应用的装载平台示意图;
图2为200L和400L等不同尺寸废物桶的桶底具有卷边,即不同尺寸废物桶的h1不同;
图3为废物桶装载底座接触面示意图,蓝色箭头所指为200L和400L废物桶桶底卷边定位槽;
图4为顶部剂量率仪定位单元示意图;
图5为侧面三组剂量率仪定位单元示意图;
图6为侧部1m处一组剂量率仪定位单元示意图。
图中:1接近开关,2底部剂量率仪定位单元,3伺服电机,4样品搁置底座,5接近开关,6回转支撑,7称重天平,8伺服电缸,9伺服电机,10支撑结构,11拖链,12顶部剂量率仪,13防撞轮,14限位装置,15二级伺服电机,16一级伺服电机,17一级支持结构,18侧面剂量率仪,19伺服电缸,20拖链,21防撞轮,22二级支撑结构,23限位装置,24拖链,25 1m处剂量率仪,26伺服电缸,27伺服电缸,28限位装置,29支撑结构。
具体实施方式
下面结合附图及具体实施例对本发明作进一步详细说明。
根据国家标准GB 11806-2019《放射性物品安全运输规程》关于剂量率测量的要求,在废物桶运输时,需要给出废物桶的表面剂量率和1m处剂量率,一般要求废物桶外表面上任一点的剂量率不超过2mSv/h,特殊情况下不超过10mSv/h,相关核设施以此为限值对大体积放射性废物桶进行管理。根据国家标准EJ 1042-2014《低、中水平放射性固体废物容器钢桶》,不同规格型号的放射性废物桶尺寸有差异,常用的是200L或400L的废物桶,一般由工作人员对每个不同尺寸的废物桶逐一扫描测量。由于废物桶产生量较大、人工测量方式精度不高、放射性水平较高的废物桶存在辐射防护问题。实现自动化测量可提高扫描效率和测量精度,可降低工作人员所受辐射剂量,降低核设施工作人员集体剂量。
本发明通过装载平台装卸200L和400L等尺寸的大体积放射性废物桶,使用至少四组γ剂量率仪,适配不同尺寸废物桶,实现废物桶顶部表面剂量率、侧面表面剂量率、底部表面剂量率和侧面1m处剂量率的测量。使得多种规格大体积放射性废物桶的测量结果均可满足国家标准关于剂量率测量的要求。
一种适用于多种规格大体积放射性废物桶的剂量率测量装置,主要包括装载平台、顶部剂量率仪定位单元、侧面三组剂量率仪定位单元和侧部1m处一组剂量率仪定位单元。
如图1所示,装载平台主要包括接近开关1、底部剂量率仪定位单元2、伺服电机3、样品搁置底座4、接近开关5、回转支撑6、称重天平7。其中,接近开关1和接近开关5分别安装于样品搁置底座4侧部的装载平台外壳上部和回转支撑6内部中空位置,用于监测废物桶的装卸状态和识别废物桶尺寸,称重天平7位于装载平台最底部,用于测量废物桶重量,伺服电机3和回转支撑6安装于称重天平7顶部平台,样品搁置底座4与回转支撑6使用螺丝固定,伺服驱动3驱动回转支撑6和样品搁置底座4承载废物桶进行匀速旋转,底部剂量率仪定位单元2安装于回转支撑6中空底部位置,用于固定底部剂量率仪。
如图4所示,顶部剂量率仪定位单元主要包括伺服电缸8、伺服电机9、支撑结构10、拖链11、顶部剂量率仪12、防撞轮13和限位装置14。其中,支撑结构10与焊接主体立柱使用螺丝固定,伺服电机9驱动剂量率仪旋转运动,伺服电缸8驱动剂量率仪升降移动,以适用不同尺寸废物桶顶部表面剂量率测量,防撞轮13保护剂量率仪不与废物桶发生直接接触或碰撞。
如图5所示,侧面三组剂量率仪定位单元主要包括二级伺服电机15、一级伺服电机16、一级支持结构17、侧面剂量率仪18、伺服电缸19、拖链20、防撞轮21、二级支撑结构22、限位装置23。其中,一级支撑结构17与焊接主体18立柱使用螺丝固定,一级伺服电机16驱动二级支撑结构22进行一级旋转,二级伺服电机15驱动侧面剂量率仪18进行二级旋转,伺服电缸19推动侧面三组剂量率仪进行升降移动,以适用不同尺寸废物桶侧面表面剂量率测量,防撞轮21保护剂量率仪不与废物桶发生直接接触或碰撞。
如图6所示,侧部1m处一组剂量率仪定位单元主要包括拖链24、1m处剂量率仪25、伺服电缸26、伺服电缸27、限位装置28和支撑结构29。支撑结构29与焊接主体立柱使用螺丝固定,伺服电缸27驱动剂量率仪水平移动,伺服电缸26驱动剂量率仪升降移动,以适应不同尺寸废物桶侧面1m处剂量率测量。
本发明的测量方法需要两个模块相互配合,共同实现多种规格废物桶剂量率测量。
1、可装卸200L和400L等不同尺寸大体积放射性废物桶的装载平台,实现不同尺寸废物桶的精确定位、判别、旋转和称重。
(1)根据国家标准EJ 1042-2014《低、中水平放射性固体废物容器钢桶》和EJ1042-1996《低、中水平放射性固体废物包装容器钢桶》(虽已废止,但旧的废物桶尺寸符合此标准)的要求,200L和400L等不同尺寸废物桶的桶底具有支撑卷边,桶内放射性废物与承重卷边所在平面的距离是不同的(即h1不同)。该装载平台具有不同尺寸大体积放射性废物桶装载底座,根据废物桶直径和h1在装载底座上下沉不同深度,调整不同尺寸废物桶的桶底接触面高度,保证不同尺寸废物桶的桶底处于同一水平面,底部γ剂量率仪与废物桶的桶内放射性废物的底部距离一致,底部γ剂量率仪的测量结果对于不同尺寸的废物桶之间、相同尺寸的废物桶之间,都具有可比性。装载底座的下沉,不仅保证了不同尺寸废物桶的桶底处于同一水平面,还对不同尺寸废物桶的装载实现限位,降低其旋转时的偏心程度,对桶内活度测量与热点定位具有重要作用。该装载底座的下沉深度可根据废物桶尺寸不同而替换。
(2)该装载平台具有不同尺寸废物桶自动判别传感器,在装载底座中部的选转支撑台和侧面的防护罩外壳上各布置一个接近开关,通过判断有无来确认废物桶的尺寸,双信号为400L、单信号为200L。该自动判别功能,可通过具有测距功能的传感器替代而实现。
(3)该装载平台的装载底座下部是旋转支撑模块,通过电机、齿轮等实现废物桶的旋转,可实现剂量率仪对废物桶的扫描。
(4)该装载平台的装载底座和旋转支撑模块下面,是用于称重的、具有柔性连接方式的称重模块,装卸废物桶时,柔性连接方式产生一定晃动,降低装卸冲击力对称重传感器的影响,防止损坏,使装卸操作不会影响装载平台的定位。称重模块给出废物桶重量,该重量是计算放射性废物桶活度浓度不可或缺的参数。
2、具有旋转和平移功能的剂量率仪定位单元,实现至少两组剂量率仪靠近不同尺寸大体积放射性废物桶表面和一组剂量率仪到达距离表面1m远的指定位置,实现废物桶顶部表面剂量率、侧面表面剂量率、底部表面剂量率和侧面1m处剂量率测量。
(1)在放射性废物桶的顶部,布置了至少一组剂量率仪,该部分定位单元采用悬臂转动配合Z轴升降形式,根据不同尺寸大体积放射性废物桶的判别结果,将剂量率仪推动到废物桶顶部,测量顶部表面剂量率。该部分定位单元还采用了防撞模块,保证剂量率仪不会与废物桶顶部磕碰而损坏。
(2)在放射性废物桶的侧面,布置了至少三组剂量率仪,该部分定位单元采用一级悬臂转动、二级悬臂转动、配合Z轴升降形式,根据不同尺寸大体积放射性废物桶的判别结果,将剂量率仪推动到放射性废物桶侧表面,测量侧面表面剂量率。该部分定位单元还采用了防撞模块,保证剂量率仪不会与废物桶侧面磕碰而损坏。
(3)在放射性废物桶的底部,即装载平台的装载底座中部的旋转支撑台上,布置了至少一组剂量率仪,因为装载底座的下沉设计,该剂量率仪不需要移动,就能保证其与不同尺寸废物桶的底部距离一致,节约空间、降低机械复杂程度、节约成本,但并不是不能增加底部剂量率仪移动模块。
(4)在升降单元距离放射性废物桶较远的一侧,布置了至少一组剂量率仪,通过平移将剂量率仪推动到距离废物桶表面1m远的位置,测量1m处剂量率。
该剂量率仪定位单元实现200L和400L等尺寸的大体积放射性废物桶的表面剂量率和1m处剂量率测量,给出满足国家标准GB 11806-2019《放射性物品安全运输规程》关于剂量率测量的要求。
适用于多种规格大体积放射性废物桶的剂量率测量方法,包括如下步骤:
步骤1:通过抱夹车将200L或400L废物桶放置于装载平台,利用样品搁置底座4不同凹槽宽度和深度的设计,将200L或400L废物桶放置于指定位置。
步骤2:利用接近开关1和接近开关5对废物桶尺寸的识别结果,在测控软件中选择对应尺寸废物桶的扫描模式。
该废物桶测量装置测控软件主要由参数设置、测量控制、数据分析、数据管理、报告打印、报警管理等模块组成。在测量控制模块中,可对废物桶编号、内容物和扫描模式等进行设置,废物桶规格可由测量装置自动判别。
(1)对于内径560mm,壁厚1.2mm,高900mm的200L钢桶,顶部和侧面剂量率仪分别移动至距桶顶面和桶侧面50mm~150mm处,并且,侧面上部剂量率仪可实现200L桶600mm~900mm高度范围移动,侧面中部剂量率仪可实现200L桶300mm~600mm高度范围移动,侧面下部剂量率仪可实现200L桶0mm~300mm高度范围移动,1m处剂量率仪移动至距200L桶壁1m位置,其且可实现200L桶400mm~600mm高度范围移动。
(2)对于内径700mm,壁厚2mm,高1132mm的400L钢桶,顶部和侧面剂量率仪分别移动至距桶顶面和桶侧面50mm~150mm处,并且,侧面上部剂量率仪可实现400L桶760mm~1140mm高度范围移动,侧面中部剂量率仪可实现400L桶380mm~760mm高度范围移动,侧面下部剂量率仪可实现400L桶0mm~380mm高度范围移动,1m处剂量率仪移动至距400L桶壁1m位置,其且可实现400L桶400mm~600mm高度范围移动。
步骤3:在测控软件中点击“开始测量”,经过“配置参数确认”后,各剂量率仪在伺服电机9、15、16和伺服电缸8、19、26、27的作用下移动至预设剂量率测量位置,样品搁置底座4开始匀速旋转,各剂量率仪完成废物桶表面和1m位置处剂量率测量。
步骤4:数据分析。记录各剂量率仪实时剂量率和测量数据的平均值和最大值。
步骤5:扫描流程完成,样品搁置底座4和各剂量率仪定位单元自动复位,通过抱夹车卸载废物桶。