基于柔索并联机器人的飞行模拟系统
文献发布时间:2023-06-19 09:26:02
技术领域
本发明涉及模拟飞行器技术领域,尤其是基于柔索并联机器人的飞行模拟系统。
背景技术
飞行模拟器是用来模拟飞行器飞行的机器,它能够复现飞行器及空中环境并能够进行操作的模拟装置,同时还需要模拟飞机座舱内部的环境。传统的飞行模拟驾驶属于定点刚性支撑,即只在一个固定点上可以进行最多六维的摆动,导致传统系统不能真实模拟飞行中的飞行(比如上升、下降、翻滚等)各种难度动作。
专利CN 111462574 A U公开了飞行训练模拟系统,该飞行训练模拟系统包括:旋转支架,所述旋转支架具有三个轴向方向上的旋转自由度;所述轴向方向包括:俯仰轴、翻滚轴和偏航轴;飞行器模拟座舱,所述飞行器模拟座舱安装设置在所述旋转支架上,所述飞行器模拟座舱内形成供用户进行模拟飞行训练的沉浸式模拟训练场景;驱动装置,所述驱动装置设置在所述旋转支架上,用于驱动所述飞行器模拟座舱绕所述俯仰轴、翻滚轴和偏航轴旋转。其通过虚拟现实技术与硬件结构的配合,可以达到更好的模拟效果,提供良好并且非常接近现实的体验感,从而极大的提升了训练效果。上述方案中设计所述旋转支架具有三个轴向方向上的旋转自由度,其旋转自由度个数仍无法满足实际对模拟器飞行的难度需求。
发明内容本发明目的在于改善和突破传统飞行模拟器仿真飞行的结构局限性,即现有的传统飞行模拟属于刚性系统,即只在一个固定点上可以进行最多六维的摆动,导致传统系统不能真实模拟飞行中的飞行比如上升、下降、翻滚各种难度动作。保证仿真飞行模拟系统能够实现大幅度的摆动、回转和联合动作-在回转中摆动局限,并在仿真飞行中产生类似爬升的体验感,提供了一款新颖的飞行模拟器。
本发明提供的技术方案是:
基于柔索并联机器人的飞行模拟系统,包括:柔索并联机器人、飞行驾驶座舱、VR头盔、滚环以及控制装置;
所述飞行驾驶座舱安装在所述滚环中央,所述柔索并联机器人包括根立柱和根柔索,所述柔索一端连接所述立柱,另一端吊起所述滚环,由所述柔索并联机器人带动所述滚环中央的所述飞行驾驶座舱运动;
所述控制装置分别和所述VR头盔、所述飞行驾驶座舱以及所述柔索并联机器人相互通信;
乘坐所述飞行驾驶座舱的体验者佩戴所述VR头盔,做出指令动作,通过控制装置调整控制所述柔索并联机器人进一步带动所述滚环中央的所述飞行驾驶座舱做出和所述指令动作相对应的运动轨迹。
进一步的,所述飞行驾驶座舱设有飞行控制手柄,所述飞行控制手柄电连接所述控制装置,且和所述控制装置通信,通过所述飞行控制手柄控制“飞机”在虚拟场景中做出起飞、降落和多种复杂动作。
进一步的,所述滚环为一维滚环、二维滚环或者三维滚环;所述二维滚环设有两个滚环且所述二维滚环中两个滚环嵌套机械连接,每个所述滚环均可以围绕连接端所在直线延长线做旋转动作,所述三维滚环设有3个滚环,且所述三个滚环逐一嵌套机械连接,所述三维滚环每个滚环围绕相邻的连接端所在直线延长线做旋转动作。
进一步的,所述柔索并联机器人还包括伺服电机以及减速机,所述伺服电机机械连接所述减速机,并控制所述减速机的启动和停止动作;所述减速机设有绳盘,用于调整所述柔索的收卷长度,所述柔索一端连接所述立柱,另一端吊起所述滚环,由所述柔索并联机器人带动所述滚环中央的所述飞行驾驶座舱运动。
进一步的,所述控制装置包括通讯模块、主控制器、投影仪及投影屏幕和软件;所述控制器分别电连接并通信于所述通信模块、所述投影仪及投影屏幕、所述VR头盔和所述飞行控制手柄;通过所述飞行控制手柄做出的动作指令,通过所述通信模块传递给所述主控制器,所述主控制器经过运算后通信所述柔索并联机器人和所述VR头盔,所述柔索并联机器人进一步控制所述滚环中央的所述飞行驾驶座舱做对应的动作,并通过所述VR头盔显现所述飞行驾驶座舱的全部过程。
进一步的,所述控制装置还包括状态监控模块,以及分别与状态监控模块连接的运动识别模块、轨迹生成模块以及飞行视景模拟模块,所述运动识别模块用于识别并处理所述飞行驾驶座舱的运动信号,并将信号传输至轨迹生成模块;所述轨迹生成模块用于识别并处理运动识别模块所传递的信号,并生成所述飞行驾驶座舱运动轨迹的信号,同时将信号传递至飞行视景模拟模块。
进一步的,所述运动识别模块包括安装于所述飞行驾驶座舱上的位置传感器,位置传感器用于识别所述飞行驾驶座舱的运动并生成运动信号。
进一步的,所述主控制器包括用于结算仿真数据的核心结算模块和用于将外部设备的数据的信号提供给所述核心结算模块的信号采集模块;所述信号采集模块包括用于将数据信号提供给所述核心结算单元的系统试验台信号采集装置、与核心结算模块电连接的用于向核心结算模块输入控制指令并且用于输出核心结算模块结算出的仿真数据的输入输出模块,所述输入输出模块设有触摸屏显示器,所述触摸屏显示器关联所述输入输出模块并互相通信。
进一步的,所述主控制器还包括模式选择模块,其与所述核心结算模块、所述信号采集模块分别电连接,模式的切换,便于将所述核心结算模块替换成真实或者仿真的外部设备。
进一步的,所述柔索并联机器人还包括定向滑轮,所述立柱其中一端和底面固定连接;所述立柱中每根立柱两端分别设有一个定向滑轮;所述柔索中每一根索索一端连接所述减速机上的所述绳盘,紧贴所述立柱,所述柔索的另一端吊起所述滚环,整根所述柔索靠所述两个定向滑轮过渡;所述柔索并联机器人带动所述滚环中央的所述飞行驾驶座舱运动。
本发明的一个方面带来的有益效果是:与传统仿真飞行模拟设备相比较,本发明增加了仿真飞行的多种动作和“飞行”难度,提高了虚拟仿真飞行的逼真度,提高了虚拟仿真飞行的真实感。并且在同功能实现的水平上,大大降低了成本。
本发明的一个方面带来的有益效果是:本发明所述的系统,飞行模拟舱可以在一个空间内运动,因而可以实现真正意义上的上升、下降、直线前行和弧线运动和多维度摆动。同时,它增加了二维或三维滚环,使飞行模拟座舱可以实现在空中的翻滚动作,因而增添了飞行模拟中对多种难度动作的体验感。这在现有的传统飞行模拟系统中,是不可能实现的。
附图说明
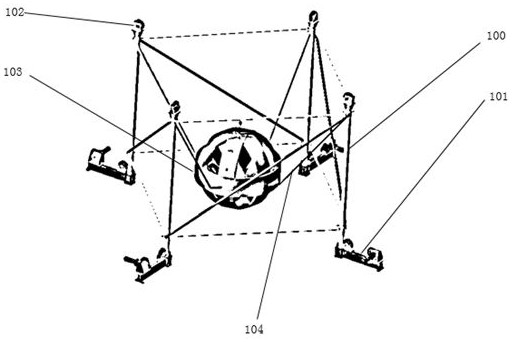
图1为本发明基于柔索并联机器人的飞行模拟系统设备原理示意图;
图2为本发明基于柔索并联机器人的飞行模拟系统中滚环结构示意图;
图3为本发明基于柔索并联机器人的飞行模拟系统中并联机器人立柱结构示意图;
图4为本发明基于柔索并联机器人的飞行模拟系统滚环连接部件结构示意图;
图5为本发明基于柔索并联机器人的飞行模拟系统飞行驾驶座舱结构示意图;
图6为本发明基于柔索并联机器人的飞行模拟系统各部件关系框架图;
图7为本发明基于柔索并联机器人的飞行模拟系统控制装置电气原理图;
图8为本发明基于柔索并联机器人的飞行模拟系统实施例中主控制器电气原理图;
其中98、控制装置,99、柔索并联机器人,100、立柱,101、伺服电机及减速机,102、定向滑轮,103、飞行驾驶座舱,104、柔索,105、滚环,106、滚环固定销,107、VR头盔,108、主控制器,109、通讯模块,110、投影仪及投影屏,111、软件,112、飞行控制手柄,113、运动识别模块,114、位置传感器,115、轨迹生成模块,116、飞行视景模拟模块,117、状态监控模块、118、信号采集模块,119、核心结算模块,120、触摸屏显示器,121、输入输出模块,122、信号采集装置、123、模式选择模块。
具体实施方式
为使本发明解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面将结合附图对本发明实施例的技术方案做进一步的详细描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的实施例,都属于本发明的保护范围。
实施例1
本实施例的目的是对上述技术方案的实施方式及注意要点做进一步举例阐述,具体如下:
基于柔索并联机器人的飞行模拟系统,如图1、图2、图3、图4、图5以及图6所示,包括:柔索并联机器人99、飞行驾驶座舱103、VR头盔107、滚环105以及控制装置98。
其中飞行驾驶座舱103安装在滚环105中央,柔索并联机器人(99)包括根立柱(100)和根柔索104,柔索104一端连接所述立柱100,另一端吊起所述滚环105,由柔索并联机器人99带动所述滚环105中央的所述飞行驾驶座舱103运动。
控制装置98分别和VR头盔107、飞行驾驶座舱103以及柔索并联机器人99相互通信,乘坐飞行驾驶座舱的体验者佩戴VR头盔107,做出指令动作,通过控制装置98调整控制柔索并联机器人99进一步带动所述滚环105中央的飞行驾驶座舱103做出和指令动作相对应的运动轨迹。
飞行驾驶座舱103设有飞行控制手柄,飞行控制手柄电连接控制装置98,且和控制装置98通信,通过所述飞行控制手柄112控制“飞机”在虚拟场景中做出起飞、降落和多种复杂动作。
滚环105为一维滚环、二维滚环或者三维滚环。其中二维滚环设有两个滚环且二维滚环中两个滚环嵌套,采用滚环固定销106机械连接,每个滚环均可以围绕连接端所在直线延长线做旋转动作,三维滚环设有3个滚环,且三个滚环逐一嵌套机械连接,三维滚环每个滚环围绕相邻的连接端所在直线延长线做旋转动作。
柔索并联机器人99还包括伺服电机以及减速机101,伺服电机机械连接所述减速机,并控制所述减速机的启动和停止动作。减速机设有绳盘,用于调整所述柔索104的收卷长度,柔索104一端连接所述立柱100,另一端吊起所述滚环105,由柔索并联机器人99带动滚环105中央飞行驾驶座舱103运动。
控制装置98包括通讯模块109、主控制器108、投影仪及投影屏幕110和软件111。主控制器108分别电连接并通信于通信模块109、投影仪及投影屏幕110、VR头盔107和飞行控制手柄112。
通过飞行控制手柄112做出的动作指令,通信于通信模块109并传递给主控制器108,主控制器108经过运算后通信柔索并联机器人99和VR头盔107,柔索并联机器人99进一步控制滚环105中央的飞行驾驶座舱103做对应的动作,并通过VR头盔107显现所述飞行驾驶座舱的全部过程。
实施例2
本实施例在实施例1的基础上对飞行模拟器的控制装置的功能做进一步延伸,实现飞行模拟器对自身状态的监控、轨迹预设以及校准的功能,具体过程如下:
基于柔索并联机器人的飞行模拟系统,如图1、图2、图3、图4、图5以及图6所示,包括:柔索并联机器人99、飞行驾驶座舱103、VR头盔107、滚环105以及控制装置98。
其中飞行驾驶座舱103安装在滚环105中央,柔索并联机器人(99)包括根立柱(100)和根柔索104,柔索104一端连接所述立柱100,另一端吊起所述滚环105,由柔索并联机器人99带动所述滚环105中央的所述飞行驾驶座舱103运动。
控制装置98分别和VR头盔107、飞行驾驶座舱103以及柔索并联机器人99相互通信,乘坐飞行驾驶座舱的体验者佩戴VR头盔107,做出指令动作,通过控制装置98调整控制柔索并联机器人99进一步带动所述滚环105中央的飞行驾驶座舱103做出和指令动作相对应的运动轨迹。
飞行驾驶座舱103设有飞行控制手柄,飞行控制手柄电连接控制装置98,且和控制装置98通信,通过所述飞行控制手柄112控制“飞机”在虚拟场景中做出起飞、降落和多种复杂动作。
滚环105为一维滚环、二维滚环或者三维滚环。其中二维滚环设有两个滚环且二维滚环中两个滚环嵌套,采用滚环固定销106机械连接,每个滚环均可以围绕连接端所在直线延长线做旋转动作,三维滚环设有3个滚环,且三个滚环逐一嵌套机械连接,三维滚环每个滚环围绕相邻的连接端所在直线延长线做旋转动作。
柔索并联机器人99还包括伺服电机以及减速机101,伺服电机机械连接所述减速机,并控制所述减速机的启动和停止动作。减速机设有绳盘,用于调整所述柔索104的收卷长度,柔索104一端连接所述立柱100,另一端吊起所述滚环105,由柔索并联机器人99带动滚环105中央飞行驾驶座舱103运动。
控制装置98包括通讯模块109、主控制器108、投影仪及投影屏幕110和软件111。主控制器108分别电连接并通信于通信模块109、投影仪及投影屏幕110、VR头盔107和飞行控制手柄112。
控制装置98还包括如图7所示,状态监控模块117,以及分别与状态监控模块117连接的运动识别模块113、轨迹生成模块115以及飞行视景模拟模块116。
运动识别模块113用于识别并处理所述飞行驾驶座舱103的运动信号,并将信号传输至轨迹生成模块115;
轨迹生成模块115用于识别并处理运动识别模块113所传递的信号,并生成所述飞行驾驶座舱103运动轨迹的信号,同时将信号传递至飞行视景模拟模块103。
运动识别模块113包括安装于所述飞行驾驶座舱103上的位置传感器114,位置传感器114用于识别所述飞行驾驶座舱103的运动并生成运动信号。
通过飞行控制手柄112做出的动作指令,通信于通信模块109并传递给主控制器108,主控制器108经过运算后通信柔索并联机器人99和VR头盔107,柔索并联机器人99进一步控制滚环105中央的飞行驾驶座舱103做对应的动作,并通过VR头盔107显现所述飞行驾驶座舱的全部过程。
实施例3
本实施例是在实施例2的基础上,对本发明基于柔索并联机器人的飞行模拟系统,其主控制器的功能做进一步延伸,增加主控制器的运算效率以及虚实结合的全程动态视觉冲击感。具体过程如下所示:
基于柔索并联机器人的飞行模拟系统,如图1、图2、图3、图4、图5以及图6所示,包括:柔索并联机器人99、飞行驾驶座舱103、VR头盔107、滚环105以及控制装置98。
其中飞行驾驶座舱103安装在滚环105中央,柔索并联机器人(99)包括根立柱(100)和根柔索104,柔索104一端连接所述立柱100,另一端吊起所述滚环105,由柔索并联机器人99带动所述滚环105中央的所述飞行驾驶座舱103运动。
控制装置98分别和VR头盔107、飞行驾驶座舱103以及柔索并联机器人99相互通信,乘坐飞行驾驶座舱的体验者佩戴VR头盔107,做出指令动作,通过控制装置98调整控制柔索并联机器人99进一步带动所述滚环105中央的飞行驾驶座舱103做出和指令动作相对应的运动轨迹。
飞行驾驶座舱103设有飞行控制手柄,飞行控制手柄电连接控制装置98,且和控制装置98通信,通过所述飞行控制手柄112控制“飞机”在虚拟场景中做出起飞、降落和多种复杂动作。
滚环105为一维滚环、二维滚环或者三维滚环。其中二维滚环设有两个滚环且二维滚环中两个滚环嵌套,采用滚环固定销106机械连接,每个滚环均可以围绕连接端所在直线延长线做旋转动作,三维滚环设有3个滚环,且三个滚环逐一嵌套机械连接,三维滚环每个滚环围绕相邻的连接端所在直线延长线做旋转动作。
柔索并联机器人99还包括伺服电机以及减速机101,伺服电机机械连接所述减速机,并控制所述减速机的启动和停止动作。减速机设有绳盘,用于调整所述柔索104的收卷长度,柔索104一端连接所述立柱100,另一端吊起所述滚环105,由柔索并联机器人99带动滚环105中央飞行驾驶座舱103运动。
控制装置98包括通讯模块109、主控制器108、投影仪及投影屏幕110和软件111。主控制器108分别电连接并通信于通信模块109、投影仪及投影屏幕110、VR头盔107和飞行控制手柄112。
控制装置98还包括如图7所示,状态监控模块117,以及分别与状态监控模块117连接的运动识别模块113、轨迹生成模块115以及飞行视景模拟模块116。
运动识别模块113用于识别并处理所述飞行驾驶座舱103的运动信号,并将信号传输至轨迹生成模块115;
轨迹生成模块115用于识别并处理运动识别模块113所传递的信号,并生成所述飞行驾驶座舱103运动轨迹的信号,同时将信号传递至飞行视景模拟模块103。
运动识别模块113包括安装于所述飞行驾驶座舱103上的位置传感器114,位置传感器114用于识别所述飞行驾驶座舱103的运动并生成运动信号。
主控制器108包括用于结算仿真数据的核心结算模块119和用于将外部设备的数据的信号提供给所述核心结算模块119的信号采集模块118;所述信号采集模块118包括用于将数据信号提供给所述核心结算单元119的系统试验台信号采集装置122、与核心结算模块119电连接的用于向核心结算模块119输入控制指令并且用于输出核心结算模块119结算出的仿真数据的输入输出模块121,所述输入输出模块121设有触摸屏显示器120,所述触摸屏显示器120关联输入输出模块121并互相通信。
通过飞行控制手柄112做出的动作指令,通信于通信模块109并传递给主控制器108,主控制器108经过运算后通信柔索并联机器人99和VR头盔107,柔索并联机器人99进一步控制滚环105中央的飞行驾驶座舱103做对应的动作,并通过VR头盔107显现所述飞行驾驶座舱的全部过程。
实施例4
本实施例是在实施例1、实施例2以及实施例3的基础上,对于基于柔索并联机器人的飞行模拟系统功能能做进一步功能的扩展,根据不同体验者不同的体验需求可以选择性的操控,其主要改进点在主控制器中。具体过程如下所述:
基于柔索并联机器人的飞行模拟系统,如图1、图2、图3、图4、图5以及图6所示,包括:柔索并联机器人99、飞行驾驶座舱103、VR头盔107、滚环105以及控制装置98。
其中飞行驾驶座舱103安装在滚环105中央,柔索并联机器人(99)包括根立柱(100)和根柔索104,柔索104一端连接所述立柱100,另一端吊起所述滚环105,由柔索并联机器人99带动所述滚环105中央的所述飞行驾驶座舱103运动。
控制装置98分别和VR头盔107、飞行驾驶座舱103以及柔索并联机器人99相互通信,乘坐飞行驾驶座舱的体验者佩戴VR头盔107,做出指令动作,通过控制装置98调整控制柔索并联机器人99进一步带动所述滚环105中央的飞行驾驶座舱103做出和指令动作相对应的运动轨迹。
飞行驾驶座舱103设有飞行控制手柄,飞行控制手柄电连接控制装置98,且和控制装置98通信,通过所述飞行控制手柄112控制“飞机”在虚拟场景中做出起飞、降落和多种复杂动作。
滚环105为一维滚环、二维滚环或者三维滚环。其中二维滚环设有两个滚环且二维滚环中两个滚环嵌套,采用滚环固定销106机械连接,每个滚环均可以围绕连接端所在直线延长线做旋转动作,三维滚环设有3个滚环,且三个滚环逐一嵌套机械连接,三维滚环每个滚环围绕相邻的连接端所在直线延长线做旋转动作。
柔索并联机器人99还包括伺服电机以及减速机101,伺服电机机械连接所述减速机,并控制所述减速机的启动和停止动作。减速机设有绳盘,用于调整所述柔索104的收卷长度,柔索104一端连接所述立柱100,另一端吊起所述滚环105,由柔索并联机器人99带动滚环105中央飞行驾驶座舱103运动。
控制装置98包括通讯模块109、主控制器108、投影仪及投影屏幕110和软件111。主控制器108分别电连接并通信于通信模块109、投影仪及投影屏幕110、VR头盔107和飞行控制手柄112。
控制装置98如图7所示,还包括状态监控模块117,以及分别与状态监控模块117连接的运动识别模块113、轨迹生成模块115以及飞行视景模拟模块116。
运动识别模块113用于识别并处理所述飞行驾驶座舱103的运动信号,并将信号传输至轨迹生成模块115;
轨迹生成模块115用于识别并处理运动识别模块113所传递的信号,并生成所述飞行驾驶座舱103运动轨迹的信号,同时将信号传递至飞行视景模拟模块103。
运动识别模块113包括安装于所述飞行驾驶座舱103上的位置传感器114,位置传感器114用于识别所述飞行驾驶座舱103的运动并生成运动信号。
主控制器108如图7所示,包括用于结算仿真数据的核心结算模块119和用于将外部设备的数据的信号提供给所述核心结算模块119的信号采集模块118;所述信号采集模块118包括用于将数据信号提供给所述核心结算单元119的系统试验台信号采集装置122、与核心结算模块119电连接的用于向核心结算模块119输入控制指令并且用于输出核心结算模块119结算出的仿真数据的输入输出模块121,所述输入输出模块121设有触摸屏显示器120,所述触摸屏显示器120关联输入输出模块121并互相通信。
主控制器108如图8所示,还包括模式选择模块123,其与核心结算模块119、信号采集模块122分别电连接,模式的切换,便于将所述核心结算模块119替换成真实或者仿真的外部设备。
通过飞行控制手柄112做出的动作指令,通信于通信模块109并传递给主控制器108,主控制器108经过运算后通信柔索并联机器人99和VR头盔107,柔索并联机器人99进一步控制滚环105中央的飞行驾驶座舱103做对应的动作,并通过VR头盔107显现所述飞行驾驶座舱的全部过程。
实施例5
在实施例4的基础上,本实施例对本发明基于柔索并联机器人的飞行模拟系统功能做进一步延伸,对柔索的使用方式方法做进一步调整,以避免柔索在频繁动作过程中磨损严重。具体过程如下:
基于柔索并联机器人的飞行模拟系统,如图1、图2、图3、图4、图5以及图6所示,包括:柔索并联机器人99、飞行驾驶座舱103、VR头盔107、滚环105以及控制装置98。
其中飞行驾驶座舱103安装在滚环105中央,柔索并联机器人(99)包括根立柱(100)和根柔索104,柔索104一端连接所述立柱100,另一端吊起所述滚环105,由柔索并联机器人99带动所述滚环105中央的所述飞行驾驶座舱103运动。
控制装置98分别和VR头盔107、飞行驾驶座舱103以及柔索并联机器人99相互通信,乘坐飞行驾驶座舱的体验者佩戴VR头盔107,做出指令动作,通过控制装置98调整控制柔索并联机器人99进一步带动所述滚环105中央的飞行驾驶座舱103做出和指令动作相对应的运动轨迹。
飞行驾驶座舱103设有飞行控制手柄,飞行控制手柄电连接控制装置98,且和控制装置98通信,通过所述飞行控制手柄112控制“飞机”在虚拟场景中做出起飞、降落和多种复杂动作。
滚环105为一维滚环、二维滚环或者三维滚环。其中二维滚环设有两个滚环且二维滚环中两个滚环嵌套,采用滚环固定销106机械连接,每个滚环均可以围绕连接端所在直线延长线做旋转动作,三维滚环设有3个滚环,且三个滚环逐一嵌套机械连接,三维滚环每个滚环围绕相邻的连接端所在直线延长线做旋转动作。
柔索并联机器人99还包括伺服电机以及减速机101,伺服电机机械连接所述减速机,并控制所述减速机的启动和停止动作。减速机设有绳盘,用于调整所述柔索104的收卷长度,柔索104一端连接所述立柱100,另一端吊起所述滚环105,由柔索并联机器人99带动滚环105中央飞行驾驶座舱103运动。
控制装置98包括通讯模块109、主控制器108、投影仪及投影屏幕110和软件111。主控制器108分别电连接并通信于通信模块109、投影仪及投影屏幕110、VR头盔107和飞行控制手柄112。
控制装置98如图7所示,还包括状态监控模块117,以及分别与状态监控模块117连接的运动识别模块113、轨迹生成模块115以及飞行视景模拟模块116。
运动识别模块113用于识别并处理所述飞行驾驶座舱103的运动信号,并将信号传输至轨迹生成模块115;
轨迹生成模块115用于识别并处理运动识别模块113所传递的信号,并生成所述飞行驾驶座舱103运动轨迹的信号,同时将信号传递至飞行视景模拟模块103。
运动识别模块113包括安装于所述飞行驾驶座舱103上的位置传感器114,位置传感器114用于识别所述飞行驾驶座舱103的运动并生成运动信号。
主控制器108如图7所示,包括用于结算仿真数据的核心结算模块119和用于将外部设备的数据的信号提供给所述核心结算模块119的信号采集模块118;所述信号采集模块118包括用于将数据信号提供给所述核心结算单元119的系统试验台信号采集装置122、与核心结算模块119电连接的用于向核心结算模块119输入控制指令并且用于输出核心结算模块119结算出的仿真数据的输入输出模块121,所述输入输出模块121设有触摸屏显示器120,所述触摸屏显示器120关联输入输出模块121并互相通信。
主控制器108还包括模式选择模块123,其与核心结算模块119、信号采集模块122分别电连接,模式的切换,便于将所述核心结算模块119替换成真实或者仿真的外部设备。
柔索并联机器人99如图8所示,还包括定向滑轮102,所述立柱100其中一端和底面固定连接;所述立柱100中每根立柱100两端分别设有一个定向滑轮102;所述柔索104中每一根索索104一端连接所述减速机101上的所述绳盘,紧贴所述立柱100,所述柔索104的另一端吊起所述滚环105,整根所述柔索104靠所述两个定向滑轮102过渡;所述柔索并联机器人99带动所述滚环105中央的所述飞行驾驶座舱103运动。
通过飞行控制手柄112做出的动作指令,通信于通信模块109并传递给主控制器108,主控制器108经过运算后通信柔索并联机器人99和VR头盔107,柔索并联机器人99进一步控制滚环105中央的飞行驾驶座舱103做对应的动作,并通过VR头盔107显现所述飞行驾驶座舱的全部过程。
- 基于柔索并联机器人的飞行模拟系统
- 一种基于并联柔索机构的重载吊装机器人