两轮电动车运行姿态实时检测系统
文献发布时间:2023-06-19 09:33:52
技术领域
本发明涉及一种姿态实时检测系统,特别是一种两轮电动车运行姿态实时检测系统。
背景技术
随着社会的发展和医疗水平的进度,老年人对于代步工具的需求越来越多;现在老年人常用的就是两轮电动车作为代步工具,用于外出活动等短途代步,其一般包括转把、前轮、后轮、前叉、车身、后座和控制系统组成;但是,由于老年人的感觉、反应和驾驶能力相比于年轻人都有所衰退,难以及时察觉两轮电动车运行异常,导致老年人驾驶两轮电动车时经常发生事故。现有的两轮电动车一般只会显示当前的移动速度和电量等电动车信息,对于两轮电动车的其他运行姿态无法检测和反馈。因此,如何提供一种能够实时检测两轮电动车运行姿态的检测系统和提高两轮电动车驾驶安全性成了目前亟待解决的问题。
发明内容
本发明的目的在于,提供一种两轮电动车运行姿态实时检测系统。本发明不仅能够实时检测两轮电动车运行姿态,还能够提高两轮电动车驾驶安全性。
本发明的技术方案:两轮电动车运行姿态实时检测系统,包括MCU控制器和显示仪表盘,MCU控制器上通过无线通讯连接有位于电动车前叉的第一倾斜角传感器和位于电动车后座的第二倾斜角传感器;MCU控制器上还通过无线通讯连接有两个电子陀螺仪,两个电子陀螺仪分别位于电动车转把的左右两端部;所述MCU控制器与显示仪表盘连接;所述MCU控制器上连接有具有多个存储单元的存储体,所述显示仪表盘上设有基准设定按键。
前述的两轮电动车运行姿态实时检测系统中,所述第一倾斜角传感器用于检测电动车前轮位置处运行姿态的倾斜角度,第二倾斜角传感器用于检测电动车后轮位置处运行姿态的倾斜角度。
前述的两轮电动车运行姿态实时检测系统中,所述显示仪表盘上连接有摄像头,摄像头上连接有远程报警模块,远程报警模块与MCU控制器连接;所述远程报警模块上连接有定位器。
前述的两轮电动车运行姿态实时检测系统中,所述电子陀螺仪上连接有安装筒,安装筒套接在电动车转把内,安装筒上与电动车转把卡接的一端侧面设有定位指针。
前述的两轮电动车运行姿态实时检测系统中,所述MCU控制器上无线连接有位于电动车前轮处的第一转速传感器和位于电动车后轮处的第二转速传感器。
与现有技术相比,本发明设计了一种两轮电动车运行姿态实时检测系统,通过在电动车前叉位置和电动车后座位置设置第一倾斜角传感器和第二倾斜角传感器来分别检测两轮电动车前轮和后轮位置处的倾斜角度,通过MCU控制器来对比两个倾斜角度,判断两轮电动车处于上坡或下坡状态,并通过显示仪表盘显示提醒驾驶者;通过在两轮电动车转把上设置电子陀螺仪能够实时检测转把转动的方向、转动角度、转动加速度等运行姿态信息,通过MCU对比两个电子陀螺仪的数据来判断转把的转动是否出现转动角度过大、急转或侧倾过大的异常情况,并通过显示仪表盘进行报警来提醒驾驶者注意,从而能够实时检测两轮电动车运行姿态,提高了两轮电动车驾驶安全性;通过设置存储体能够方便记录两轮电动车在水平板上时第一倾斜角传感器和第二倾斜角传感器的初始值,通过基准设定按键将初始值设定保存后,能够在实地检测时将检测值减去初始值而获得实际值,方便第一倾斜角传感器和第二倾斜角传感器的安装和基准设定,方便使用。此外,本发明还设置了摄像头搭配远程报警模块和定位器,能够在发生事故的时候快速发送报警信息通知家属或亲人,以免老人发生事故后意识不清或糊涂时及时联系到家人;通过设置安装筒与电动车转把套接的结构能够方便电子陀螺仪的水平安装,通过安装筒与电动车转把的过盈配合能够防止安装筒意外转动,提高电子陀螺仪的检测准确性,通过定位指针能够方面利用重垂线的方法使定位指针竖直向下,方便电子陀螺仪的水平安装;通过设置第一转速传感器和第二转速传感器能够方便检测两轮电动车运行时前后轮的转速差,通过驱动轮和从动轮的转速差判断路面情况,提醒驾驶者。因此,本发明不仅能够实时检测两轮电动车运行姿态,还能够提高两轮电动车驾驶安全性,还具有安装方便和使用方便的优点。
附图说明
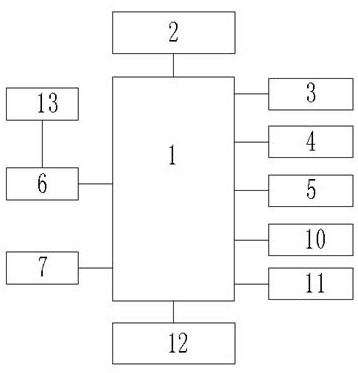
图1是本发明的结构示意图;
图2是安装筒处的剖视图;
图3是安装筒的侧视图。
附图中的标记为:1-MCU控制器,2-显示仪表盘,3-第一倾斜角传感器,4-第二倾斜角传感器,5-电子陀螺仪,6-摄像头,7-远程报警模块,8-安装筒,9-定位指针,10-第一转速传感器,11-第二转速传感器,12-存储体,13-定位器。
具体实施方式
下面结合实施例对本发明作进一步的说明,但并不作为对本发明限制的依据。
实施例。两轮电动车运行姿态实时检测系统,构成如图1、2和3所示,包括MCU控制器1(可以选用STM32 32位ARM Cortex MCU)和显示仪表盘2,MCU控制器1上通过无线通讯连接有位于电动车前叉的第一倾斜角传感器3和位于电动车后座的第二倾斜角传感器4;MCU控制器1上还通过无线通讯连接有两个电子陀螺仪5,两个电子陀螺仪5分别位于电动车转把的左右两端部;所述MCU控制器1与显示仪表盘2连接;所述MCU控制器1上连接有具有多个存储单元的存储体12,所述显示仪表盘2上设有基准设定按键。
所述第一倾斜角传感器3用于检测电动车前轮位置处运行姿态的倾斜角度,第二倾斜角传感器4用于检测电动车后轮位置处运行姿态的倾斜角度;所述显示仪表盘2上连接有摄像头6,摄像头6上连接有远程报警模块7,远程报警模块7与MCU控制器1连接;所述远程报警模块7上连接有定位器13;所述电子陀螺仪5上连接有安装筒8,安装筒8套接在电动车转把内,安装筒8上与电动车转把卡接的一端侧面设有定位指针9;所述MCU控制器1上无线连接有位于电动车前轮处的第一转速传感器10和位于电动车后轮处的第二转速传感器11。
工作原理:安装时,将两轮电动车放置在水平的平台上(可以先用水平仪检测平台的水平度);然后将第一倾斜角传感器3和第二倾斜角传感器4分别安装在两轮电动车上对应前轮和后轮的固定位置处即可(如前叉和后座),安装时使第一倾斜角传感器3和第二倾斜角传感器4的初始检测数值接近0(即接近水平)即可,后续可以使用存储体12和基准设定按键将该初始值设定为基准即可,方便安装和使用;通过连接有电子陀螺仪5的安装筒8插入电动车转把即可,安装筒8端部朝向转把一侧设有凹槽,通过凹槽卡在转把上实现固定,安装筒8与转把采用过盈配合来避免意外转动而影响电子陀螺仪5的检测准确度;安装筒8上的定位指针9竖直向下即可完成基准安装位置的定位,方便安装和使用。
使用时,第一倾斜角传感器3检测前轮(即电动车前部的倾斜角度),第二倾斜角传感器4检测后轮(即电动车后部的倾斜角度),通过MCU控制器1对两者数据进行单独分析和对比分析,能够实现两轮电动车的上坡运行姿态、上坡趋势运行姿态、下坡运行姿态、下坡趋势运行姿态和水平运行姿态的运行姿态检测,提醒驾驶者或直接调节转把转动角度和电动机动力输出的转换参数,提高驾驶安全性;通过电子陀螺仪5能够在转把的两端检测转把的转动角度、转动方向和转动加速度,能够在猛打方向或转把转动过大时提醒驾驶者注意安全,位于转把两端的电子陀螺仪5能够更加准确及时的反应相应转动数据,反应电动车转弯运行姿态;通过摄像头6、远程报警模块7和定位器13的配合,能够在出事故时拍摄现场情况,选用可远程控制调节角度的摄像头还能远程控制移动,通过定位器13能够定位出事地点,方便家人及时赶到或者及时与交警联系。在两轮电动车行驶时,通过第一转速传感器10和第二转速传感器11能够分别检测前轮和后轮的转速,遇到湿滑路面或泥泞路面等特殊环境时,MCU控制器1能够比较第一转速传感器10和第二转速传感器11测得的转速差,判断路面情况从而控制显示仪表盘2显示报警或限制急加速、急减速等危险操作,从而进一步提高驾驶安全性。
- 两轮电动车运行姿态实时检测系统
- 一种两轮电动车运行姿态实时检测系统