一种三维自由弯曲主动式弯曲模运动位姿解析方法
文献发布时间:2023-06-19 09:40:06
技术领域
本发明属于金属复杂构件先进制造技术领域,具体涉及一种三维自由弯曲主动式弯曲模运动位姿解析方法。
背景技术
具有空间复杂构形的弯曲件在航空航天、核能、新能源汽车等领域应用广泛,例如航天器广泛使用的热控管路系统的导管类部件具有复杂二维平面及三维空间轴线,长期在特殊环境下服役。实际服役过程中,轴线形状复杂的热管需紧贴舱体内外壁,通过有效换热以保障工作温度,若构件轴线空间形状不准,易导致热控弯曲构件与舱壁贴合不良,降低换热效率。采用现有技术制造的弯曲构件无法同时满足三维轴线精度、截面畸变率、成形整体性等关键技术指标,在实际服役过程中经常会由于强烈振动、腐蚀或机械损伤等因素发生磨损及轴线错位,严重影响管路介质输送效率和导管使用寿命。
三维自由弯曲技术能够实现具有复杂空间轴线的管材、型材的高精度柔性成形,具有主动式弯曲模的三维自由弯曲装备具有更为强大的成形能力和更高的成形精度。弯曲件轴线的精准程度很大程度上取决于主动式弯曲模的运动位姿控制与解析是否精确,然而,目前三维自由弯曲技术中仍缺乏一套完整的主动式弯曲模运动位姿解析方法,在成形具有复杂轴线的弯曲件过程中依然采用不断试错和矫形等传统手段,难以一次精确成形其轴线形状,且难以预先判断成形件是否会与设备发生干涉,这已成为三维自由弯曲技术亟待解决的问题之一。
发明内容
本发明针对目前三维自由弯曲技术在主动式弯曲模的运动位姿控制与解析方面的空缺,提供了一种三维自由弯曲主动式弯曲模运动位姿解析方法。
本发明采用以下技术方案:
一种三维自由弯曲主动式弯曲模运动位姿解析方法,在弯曲成形前,首先根据弯曲件构形提取管材轴线,依次划分并标记成形段;建立管材轴线全局坐标系,获得直线起始点、直线-弧线相切点和弧线终止点的空间坐标;基于管材轴线全局坐标系,构建弯曲模的空间位姿;弯曲成形过程中,针对每一成形段,将管材轴线旋转至与全局坐标系 z轴平行,基于该变换重新计算点坐标,并判断弯曲模运动方向、计算偏移距离和旋转角度,解析弯曲成形过程中的弯曲模位姿。
所述的解析方法,步骤包括:
第一步,弯曲成形前,根据目标弯曲件的空间构形提取管材轴线,将管材轴线按照几何特征依次划分成形段,每个成形段记为i,并按照顺序标号:即i=①,②,③……;成形段的划分原则是根据包含直线段-弧线段的直-弯形构件的构型,将每一包含直线段- 弧线段划分为一个成形段,如果所有直线段-弧线段都划分完成后还剩下单独的直线段,那么该直线段也视为一个成形段;
第二步,在管材轴线第一段的起始点位置建立管材轴线全局坐标系O
第三步,当前成形段i的轴线由直线和弧线两部分组成,并且从直线部分开始;根据直线部分的起始点和与弧线部分相切点的空间坐标计算直线部分在O
第四步,在解析弯曲模运动位姿时,对于成形段i的直线部分,弯曲模在直线起始点和直线与弧线相切点所对应位姿保持不变;而对于成形段i的弧线部分,根据其直线和弧线部分相切点和弧线部分终止点的连线在O
第五步,在计算弯曲模偏移距离时,成形段i的直线部分对应弯曲模位姿不发生变化,所以弯曲模偏距距离为0;而对于成形段i的弧线部分,需要根据圆弧半径R
第六步,在计算弯曲模旋转角度时,成形段i的直线部分对应弯曲模不产生旋转运动,所以旋转角度为0;对于成形段i的弧线部分,需根据第五步确定的弯曲模偏移距离U
所述的解析方法,第二步中,根据所建立的管材轴线全局坐标系O
所述的解析方法,第三步中,当前成形段i的直线部分在O
所述的解析方法,第四步中,解析弯曲模在O
所述的解析方法,第五步中,在解析弯曲模偏移距离时,成形段i的直线部分由于弯曲模不发生偏移,偏移距离为0;对于成形段i的弧线部分,根据实验建立的U
所述的解析方法,弯曲模的空间位姿根据管材的轴线构形实时主动调整,弯曲模在运动过程中具有沿x/y轴移动和绕y/x轴转动四个自由度,可合成为x-y平面内的移动和绕x-y面内任意轴的转动,满足了三维自由弯曲主动式弯曲模能够成形空间任意弯曲方向、任意弯曲角度的构件以及成形过程中与管材轴线实时保持垂直的要求。
所述的解析方法,在成形至每一段的直线-弧线相切点位置时,O
所述的解析方法,根据成形段i中直线-弧线相切点、弧线终止点空间坐标,弧线起点处切线方向,并结合弧线半径,计算得到弧线段的长度,再结合直线段长度,可以确定成形段i的管材进给长度。
本发明具有如下有益效果:
1)本发明可以实现具有“直-弯”特征的平面及空间弯曲构件的一次精确成形,解决了如何根据空间复杂轴线构形确定弯曲模运动方向、偏移距离以及旋转角度的难题,避免了传统人为判定误差导致的多次试错等弊端。
2)本发明通过实时更新全局坐标系中管材空间坐标,解析得到主动式弯曲模在成形过程中的位姿变化,对于主动式自由弯曲设备的运动轨迹控制及防干涉具有重要意义。
3)本发明方法简单可行,有利于提高五轴、六轴等主动式三维自由弯曲设备的加工精度,在航空航天、核电、汽车等工程领域具有重要的工程应用价值和明显的经济效益。
附图说明
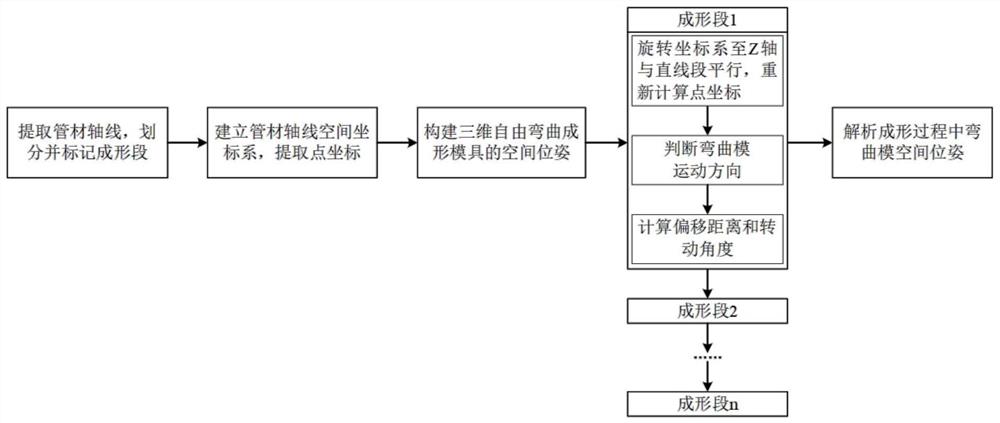
图1、三维自由弯曲主动式弯曲模运动位姿解算方法流程图;
图2、三维自由弯曲主动式弯曲模运动位姿坐标系变换示意图;
图3、平面“直-弯”特征弯曲管件示意图;
图4、空间“直-弯”特征弯曲管件示意图;
图5、空间“直-弯”特征弯曲管件示意图;
具体实施方式
以下结合具体实施例,对本发明进行详细说明。
如图1所示为三维自由弯曲主动式弯曲模运动位姿解算方法流程图,主要步骤包括:
第一步,弯曲成形前,根据目标弯曲件1的空间构形提取管材轴线,将管材轴线按照几何特征(直线段-弧线段)依次划分成形段,每个成形段记为i(成形段i由直线部分和弧线部分组成),并按照顺序标号:即i=①,②,③……,如图2(a)所示;
第二步,在管材轴线第一段的起始点位置建立管材轴线全局坐标系O
第三步,获得当前成形段i的直线部分在O
第四步,判断弯曲模的运动方向:对于成形段i的直线部分,弯曲模在直线起始点和直线与弧线相切点所对应位姿保持不变;而对于成形段i的弧线部分,根据弧线部分前后两点的空间位置坐标在O
第五步,计算弯曲模在O
第六步,计算弯曲模旋转角度,成形段i的直线部分弯曲模不旋转;对于成形段i的弧线部分,需要根据第五步确定的弯曲模偏移距离U
如图2所示为三维自由弯曲主动式弯曲模运动位姿坐标系变换示意图,根据第五步和第六步的计算结果,弯曲模在成形段i弧线部分时,会发生平移与旋转的复合运动,即弯曲模发生沿U
以下结合“平面‘直-弯’特征弯曲管件”、“空间‘直-弯’特征弯曲管件”的具体实施实例,对本发明进行详细说明。
实施例1
图3为具有“直-弯”特征的平面弯曲构件,成形该零件时的三维自由弯曲主动式弯曲模运动位姿解析方法如下:
1)、弯曲成形前,根据目标弯曲件(1)的构形提取管材轴线,将管材轴线按照几何特征(直线段-弧线段)依次划分为2个成形段和1个直线段,每个成形段记为i,并按照顺序标号:即i=①,②,③;
2)、在管材轴线第一段的起始点位置建立管材轴线全局坐标系O
3)成形段①的直线部分在O
4)、成形段②的直线部分在O
5)、成形段③的直线部分在O
实施例2
图4为具有“直-弯”特征的空间弯曲构件,成形该零件时的三维自由弯曲主动式弯曲模运动位姿解析方法如下
1)、弯曲成形前,根据目标弯曲件的构形提取管材轴线,将管材轴线按照几何特征(直线段-弧线段)依次划分为3个成形段,每个成形段记为i,并按照顺序标号:即i=①,②,③;
2)、在管材轴线第一段的起始点位置建立管材轴线全局坐标系O
3)、成形段①的直线部分在O
4)、成形段②的直线部分在O
6)、成形段③的直线部分在O
实施例3
图5为具有“直-弯”特征的空间弯曲构件,成形该零件时的三维自由弯曲主动式弯曲模运动位姿解析方法如下
1)、弯曲成形前,根据目标弯曲件1的构形提取管材轴线,将管材轴线按照几何特征(直线段-弧线段)依次划分为3个成形段,每个成形段记为i,并按照顺序标号:即 i=①,②,③;
2)、在管材轴线第一段的起始点位置建立管材轴线全局坐标系O
3)、成形段①的直线部分在O
4)、成形段②的直线部分在O
6)、成形段③的直线部分在O
应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
- 一种三维自由弯曲主动式弯曲模运动位姿解析方法
- 基于3-RPSR并联机构的自由弯曲成形设备运动位姿解析方法