一种基于高斯混合概率假设密度滤波器的静态融合方法
文献发布时间:2023-06-19 09:46:20
技术领域
本发明属于信息处理领域,具体涉及一种滤波器的静态融合方法。
背景技术
在进行水下目标跟踪时,通常希望利用多个传感器通过扩展和加强观察空间来提高跟踪性能,即多基地目标跟踪系统。为了整合处理来自所有来源的量测数据,经常需要进行多基地数据融合。通过将单次扫描所获得的不同传感器的量测数据进行融合,进行信息的预处理筛选以得到精度更高、虚警更少的等效量测集,从而提高后续目标跟踪的精确度,这一过程称之为静态融合。目前常用的静态融合方法包括Scan box方法、网格筛选和蒙特卡洛采样的静态融合方法等。但现有的方法尽管实现简单,但运算效率较低且对量测的协方差没有充分利用,在传感器数量较少的情况下融合性能较差。
发明内容
为了克服现有技术的不足,本发明提供了一种基于高斯混合概率假设密度滤波器的静态融合方法,通过将时间维上的多目标跟踪算法迁移到传感器维度上,多源目标静态融合问题可以被看作是时间间隔为0的多目标跟踪问题,在此基础上进行目标的状态模型和观测模型的建模,再将高速有效的跟踪算法——高斯混合概率假设密度(GMPHD)滤波依据模型修改后进行静态融合,可以得到精度更高的融合结果且运算效率大幅提高。该方法适用于各种情况的输入量测,可有效提高融合结果的定位精度和运算效率。
本发明解决其技术问题所采用的技术方案包括以下步骤:
步骤1:假定在多源目标量测信息融合场景中包含N个独立工作的传感器,以任一传感器为原点,建立笛卡尔坐标系;传感器n返回m
假定任一对目标的量测为二维向量z=(τ,θ),其中,τ为时延,θ为方位,τ和θ的测量误差互不相关且服从高斯分布,其方差分别为
步骤2:建立传感器对静止目标进行观测的状态模型为:
X
式中,X
建立传感器对静止目标进行观测的观测模型为:
Z
式中,观测矩阵H是二维单位矩阵I,测量噪声y
步骤3:获取改进GMPHD滤波器的高斯分量参数;
步骤3-1:定义J
步骤3-2:将第n个传感器观测范围内的目标状态表示为有限集
步骤3-3:假设在第n个传感器的观测范围内不存在从第n-1个传感器观测范围内增殖的新目标,自然产生的新生目标的强度为γ
步骤3-4:给定目标状态x
步骤3-5:由步骤3-1到步骤3-4的假设,得到第n-1个传感器观测范围内观测目标的后验强度为以下高斯混合模型:
其中J
则第n个传感器观测范围内观测目标的预测强度为:
v
以概率p
其中,
则第n个传感器观测范围内的预测强度用以下高斯混合模型表示:
其中,J
因此在第n个传感器观测范围内观测目标的后验强度为
其中,
其中,
最终获得第n个传感器观测范围内的更新后的目标后验强度的高斯混合模型分量{w
步骤4:对步骤3得到的高斯分量{w
枝剪:将权重低于预设权重阈值T的高斯分量丢弃或者按权重从大到小保留给定数量J
合并:当两个高斯分量之间的距离小于预设阈值U,则两个高斯分量依据最小均方误差准则合并为一个;
最终将权重超过给定阈值的高斯分量的均值m提取出来,得到的多目标位置估计作为静态融合的结果。
优选地,所述T=10
有益效果:
本发明的一种基于高斯混合概率假设密度滤波器的静态融合方法,适用于各种观测环境下的输入量测,能有效利用目标的协方差信息,从而在传感器数量较少的情况下提高融合性能,相比常用的静态融合方法,在融合后的定位精度以及运算效率上有显著的优势。
附图说明
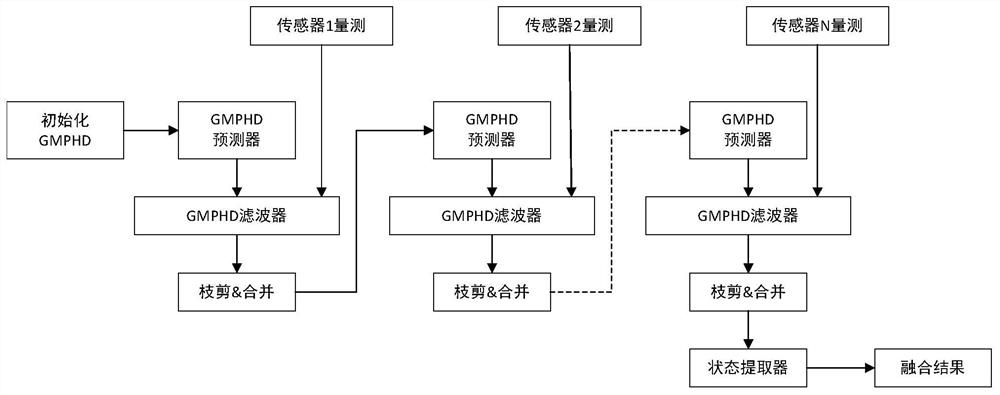
图1为本发明方法的流程示意图。
图2为本发明方法的静态融合结果图,图(a)为仿真场景,图(b)为静态融合结果。
图3为本发明方法与网格筛选方法的结果对比图,图(a)为固定方位测量误差(标准差)为1°场景,图(b)为固定距离测量误差(标准差)为20m场景。
具体实施方式
下面结合附图和实施例对本发明进一步说明。
如图1所示,一种基于高斯混合概率假设密度滤波器的静态融合方法,包括如下步骤:
步骤1:假定在多源目标量测信息融合场景中包含N个独立工作的传感器,以任一传感器为原点,建立笛卡尔坐标系;传感器n返回m
假定任一对目标的量测为二维向量z=(τ,θ),其中,τ为时延,θ为方位,τ和θ的测量误差互不相关且服从高斯分布,其方差分别为
步骤2:建立传感器对静止目标进行观测的状态模型为:
X
式中,X
建立传感器对静止目标进行观测的观测模型为:
Z
式中,观测矩阵H是二维单位矩阵I,测量噪声y
步骤3:获取改进GMPHD滤波器的高斯分量参数,目标是同时估计目标的数量和每个目标在笛卡尔坐标系下的二维位置;
GMPHD滤波器是一种基于线性高斯目标动力学和高斯目标出生模型提出的PHD递归的解析解,以高斯和的形式来近似多目标的概率假设密度(PHD),并得出了组成高斯分量的权重、均值和协方差的闭式递归;
步骤3-1:定义J
步骤3-2:将第n个传感器观测范围内的目标状态表示为有限集
步骤3-3:假设在第n个传感器的观测范围内有自然产生的新目标,在第n个传感器的观测范围内不存在从第n-1个传感器观测范围内增殖的新目标,自然产生的新生目标的强度为γ
步骤3-4:给定目标状态x
步骤3-5:由步骤3-1到步骤3-4的假设,得到第n-1个传感器观测范围内观测目标的后验强度为以下高斯混合模型:
其中J
则第n个传感器观测范围内观测目标的预测强度为:
v
以概率p
其中,
则第n个传感器观测范围内的预测强度用以下高斯混合模型表示:
其中,J
因此在第n个传感器观测范围内观测目标的后验强度为
其中,
其中,
最终获得第n个传感器观测范围内的更新后的目标后验强度的高斯混合模型分量{w
步骤4:对步骤3得到的高斯分量{w
枝剪:将权重低于10
合并:当两个高斯分量之间的距离小于100,则两个高斯分量依据最小均方误差准则合并为一个;
最终将权重超过给定阈值的高斯分量的均值m提取出来,得到的多目标位置估计作为静态融合的结果。
关于量测集有以下的假设:1)传感器之间独立工作;2)量测中包含一部分目标相关的量测以及虚假量测(杂波)。其中与目标相关的量测存在一个0均值的多维高斯分布;而虚假量测在观测空间上服从均匀分布,其数量则服从泊松分布,具有参数λ(单位空间内虚假量测数量的期望);3)每个传感器由于性能差异会具有不同的检测概率P
具体实施例:
1、为空间中的传感器节点以及目标位置指定一个固定的参考坐标,并为方位测量指定一个统一的参考方向。每个传感器会返回目标的方位量测和时延量测,并存在与传感器节点性能有关的测量误差。利用发射源-目标-接收器三者的几何关系进行量测转换,将方位与时延量测转化为相应的二维笛卡尔坐标。
2、本发明将多传感器静态融合问题看作传感器维度上的目标跟踪问题,于是在该场景中每次扫描的时间间隔为0,且在传感器观测范围内目标的运动状态为静止,不存在目标的消失和增殖,但传感器观测范围内可能存在新生目标,以此进行数学建模,创建相应的目标状态模型和观测模型。
3、为了处理步骤1中获得的目标量测,依据步骤2的目标模型,选用高斯混合概率假设密度滤波算法对“静止”目标进行跟踪,作为一种高速有效的多目标跟踪算法,GMPHD滤波算法有较好的处理结果并极大提高了运算效率。对GMPHD滤波的结果中的高斯分量进行枝剪和合并,然后将权重超过阈值的高斯分量的均值提取出来,就是最后的融合结果。
4、通过计算机仿真给出了一种较为直观的环境下本发明的融合结果,演示了本发明的建模方法以及静态融合过程,并提供了相同仿真环境下常用方法的静态融合结果作为比对。
对于一个分布式水下传感器网络,空间中存在9个传感器节点,其中1个传感器节点为发射源,位置为(-5000m,-5000m),其他8个传感器节点为接收器,位置分别为(-5000m,0),(-5000m,5000m),(0,-5000m),(0,0),(0,5000m),(5000m,-5000m),(5000m,0),(5000m,5000m)。传感器节点测量精度较高,方位估计偏差标准差设置为1°,时延估计偏差标准差设置为0.01s。在观测区域内单个目标沿直线匀速运动,目标出现时间为0s,消失时间为3600s,杂波呈瑞利分布,检测阈值为7dB,声速1500m/s,传感器每60s进行一次扫描。该场景仿真如图2(a)所示,其中圆圈为传感器节点,黑色点为传感器检测到的所有量测点,其中包含来源于目标的和来源于杂波的。GMPHD参数设置为:目标存活概率p
为了表征本发明方法的优势,使用100次蒙特卡洛试验的均方根误差大小来衡量本发明方法和常用方法网格筛选方法进行静态融合后位置估计的定位精度的优劣。两种方法在不同测量误差下的表现如图3(a)和图3(b)所示。图3(a)中固定方位测量误差(标准差)为1°,改变距离测量误差(标准差),每次使用100次蒙特卡洛实验统计均方根误差;图3(b)中固定距离测量误差(标准差)为20m,改变方位误差(标准差),每次使用100次蒙特卡洛实验统计均方根误差。此外GMPHD静态融合方法和网格筛选静态融合方法在同一仿真环境下的运行时间分别为:9.071s和69.756s。从图中可以看出基于GMPHD的静态融合方法在融合定位精度上有确切的优势,并且极大提高了运算效率。
- 一种基于高斯混合概率假设密度滤波器的静态融合方法
- 一种基于高斯混合概率假设密度滤波器的多目标航迹提取方法