一种门锁结构及应用有该门锁结构的清洗机
文献发布时间:2023-06-19 09:52:39
技术领域
本发明涉及一种门锁结构及应用有该门锁结构的清洗机。
背景技术
对于具有功能性内腔的箱体来说,由于功能需求,通常会在箱体的端口处设置能将该端口打开或遮盖的门体,并且,在箱体使用过程中,需要将门体相对于箱体锁住。
例如,申请号为CN200410043122.5的中国发明专利申请《门开关机构以及具有该门开关机构的餐具清洗机》(申请公布号:CN1550202A)披露了一种结构,其包括:为了开关餐具清洗机上设置的餐具投入口而配置成可以转动的门,和伴随所述门的转动动作而对门施加转动辅助力的转动辅助机构;所述转动辅助机构,在所述门处于从关闭状态至规定的角度范围内时,对所述门施加拉向关闭方向的转动辅助力。上述结构虽然能将门体锁紧在餐具清洗机上,但是,其锁定结构复杂,可靠性低;并且,在用于具有内腔的箱体上用于锁门时,需要将部分结构安装的门体上,对于门体本身较为单薄的结构来说,上述锁具就存在不便于装配的问题。
另外,对于洗碗机来说,清洗完毕后,洗涤腔中残余有大量蒸汽,容易产生负压而难以开启,而如果突然开启,热蒸汽扑面也严重影响客户体验;在清洗过程中,如果门体与箱体锁定之后存在一定的缝隙,也存在蒸汽溢出的风险。
因此,对于目前的门锁结构,有待于做进一步的改进。
发明内容
本发明所要解决的第一个技术问题是针对现有技术的现状,提供一种能在开门时先进行顶门使蒸汽散出再开门、锁定后可靠性好的门锁结构。
本发明所要解决的第二个技术问题是针对现有技术的现状,提供一种应用有上述门锁结构的清洗机,该清洗机通过使锁杆相对于门体发生转动而实现错位锁紧,可靠性好。
本发明解决至少一个上述技术问题所采用的技术方案为:一种门锁结构,其特征在于:包括
支架,用来与箱体连接;
锁杆,能上下升降及转动地约束在所述支架上,所述锁杆竖向布置且上端具有能穿过门体上锁口的限位块;
丝杆,能转动地竖向布置在所述支架上;
螺母副,与所述丝杆配合连接,所述锁杆连接于螺母副上且随螺母副同步运动;以及
换向套,设于所述支架上且套置在螺母副的外周,用于在所述螺母副上升过程中驱动螺母副周向转动从而使锁杆顶部的限位块与锁口对齐或交错。
在上述方案中,所述螺母副的外周壁上凸设有定位柱,相应的,所述换向套的内壁上开有能对该定位柱的走向进行引导从而驱动换向套在上升过程中进行周向转动、在下降过程中保持周向静止的导向槽。该结构便于在螺母副上升过程中带动锁杆转动,从而适应上锁及解锁状态。
具体的,所述换向套的内周壁开设有沿轴向延伸且对称布置的第一竖槽、第二竖槽,该第一竖槽、第二竖槽将所述换向套内壁分隔为相对布置的第一区域、第二区域,所述第一区域中开有自第一竖槽中下部斜向上、向第一区域中央部位延伸的第一滑道,所述第一竖槽中上部连通有斜向下、向第一区域中央部位延伸的第二滑道,该第二滑道的下端与第一滑道的上端相衔接且自衔接处竖向向下延伸形成第三滑道,该第三滑道在靠近上端处斜向上延伸形成与第二竖槽相连通的第四滑道,相应的,所述第二区域中开有与第一区域中对称布置的滑道结构。采用上述结构可实现以下动作过程:上锁时,锁杆上升→锁杆旋转90°→锁杆下拉→上锁;解锁时,锁杆上升→锁杆旋转90°→锁杆下拉复位→解锁;并且,在上锁与解锁过程中,锁杆可以不顶高门体的情况下就能实现,提高了上锁、解锁效率,而在需要顶高门体时,可通过第一滑道、第二滑道、第三滑道独立实现,在该过程中,锁杆经过正90°、-90°转动后使限位块保持在原位置不变,功能性更突出,方便操作。
优选地,所述第一竖槽中在靠近第一滑道上端处设置有在定位柱上升过程中限制其沿第一竖槽上移而仅能沿第一滑道移动的第一限位台阶。
优选地,所述第一滑道与第二滑道的衔接处设置有允许定位柱自第一滑道滑入第二滑道中而限制定位柱自第二滑道进入第一滑道中的第二限位台阶。
优选地,所述第二滑道与第一竖槽的衔接处设置有允许定位柱自第二滑道滑入第一竖槽中而限制定位柱自第一竖槽进入第二滑道中的第三限位台阶。
优选地,所述第三滑道与第二滑道的衔接处设置有允许定位柱自第二滑道滑入第三滑道中而限制定位柱自第三滑道进入第二滑道中的第四限位台阶。
优选地,所述第四滑道与第二竖槽的衔接处设置有允许定位柱自第四滑道滑入第二竖槽中而限制定位柱自第二竖槽进入第四滑道中的第五限位台阶。
本发明的门锁结构还包括能在断电状态下驱动丝杆转动的驱动机构,该驱动机构包括第一齿轮、第二齿轮、弹性件及拉绳,所述第一齿轮与丝杆相连接,所述第二齿轮能来回移动地设于第一齿轮旁侧且能在靠近第一齿轮状态下与第一齿轮啮合,所述弹性件使第二齿轮始终保持远离第一齿轮的趋势,所述拉绳的第一端缠绕于第二齿轮上,第二端为拉动端,用于驱动第二齿轮靠近第一齿轮并转动。采用上述结构,在断电状态下,如果需要将门体打开,拉动拉绳,使第二齿轮克服弹性件的弹力靠近第一齿轮并与第一齿轮相啮合,继续拉动拉绳,第二齿轮转动带动第一齿轮转动,进而带动丝杆转动。
一种应用有上述门锁结构的清洗机,包括箱体及门体,所述门体的一边缘转动连接在箱体上端口的相应边缘处,其特征在于:所述门锁结构设于箱体的外侧壁上且锁杆竖向布置,所述门体上开有供锁杆上端穿过的锁口。
与现有技术相比,本发明的优点在于:本发明的门锁结构可整体安装在箱体上,而不占用门体上的空间,仅在门体上开设锁口即可,结构合理、便于装配;本发明的门锁结构在锁门时,先使锁杆上端穿过门体上的锁口,再使锁杆相对于锁口转过移动角度,下拉锁杆使锁杆与门体锁口错位锁紧,使锁紧后的过程可靠性更好;在开门时,先将门体顶开一定间隙,供蒸汽散出,有利于提高安全性及用户体验感。
附图说明
图1为本发明实施例清洗机的结构示意图;
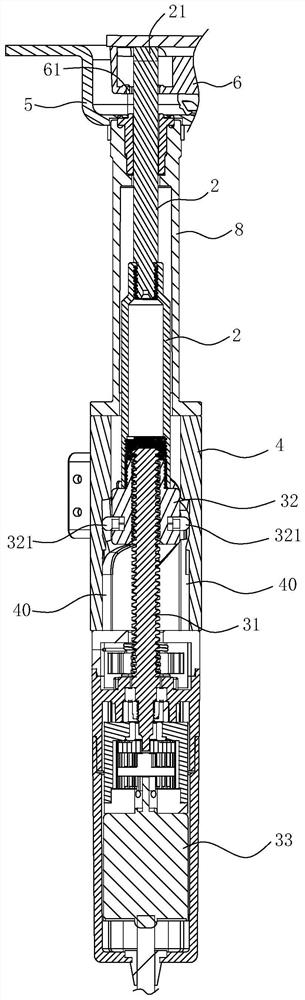
图2为图1的剖视图;
图3为本发明实施例中换向套的剖视图;
图4为本发明实施例中换向套的另一剖视图;
图5为本发明实施例中驱动机构的与丝杆的配合结构示意图;
图6为本发明实施例中换向套沿周向展开状态下导向槽的走向示意图;
图7为本发明实施例中上锁过程中锁杆上升的轨迹图;
图8为本发明实施例中上锁过程中锁杆下降的轨迹图;
图9为本发明实施例中解锁过程中锁杆上升的轨迹图;
图10为本发明实施例中解锁过程中锁杆下降的轨迹图;
图11为本发明实施例中顶门过程中锁杆上升的轨迹图;
图12为本发明实施例中顶门过程中锁杆下降的轨迹图;
图13为本发明实施例在分解状态下锁杆与门体上锁口的配合结构示意图。
具体实施方式
以下结合附图实施例对本发明作进一步详细描述。
如图1~13所示,本实施例的门锁结构用于对任意门体及箱体的锁定,本实施例以清洗机为例进行说明。本实施例的清洗机包括箱体5及门体6,门体6的一边缘转动连接在箱体5上端口的相应边缘处。
如图2所示,本实施例的门锁结构a包括支架1、锁杆2、丝杆31、螺母副32、电机33及换向套4,支架1设箱体5的侧壁上,用来安装上述锁杆2、丝杆31、螺母副32、电机33及换向套4,锁杆2能上下升降及转动地约束在支架1上,锁杆2竖向布置且上端具有能穿过门体6上锁口61的限位块21。丝杆31能转动地竖向布置在支架1上,螺母副32与丝杆31配合连接,锁杆1的下端连接于螺母副31上端且随螺母副32同步运动,电机33设于支架1上且通过减速机构与丝杆31下端相连接,用于驱动丝杆31转动。换向套4固定设于支架1上且套置在螺母副32的外周,用于在螺母副32上升过程中驱动螺母副32周向转动从而使锁杆2顶部的限位块21与锁口61对齐或交错。
上述螺母副32的外周壁上凸设有定位柱321,相应的,换向套4的内壁上开有能对该定位柱321的走向进行引导从而驱动换向套4在上升过程中进行周向转动、在下降过程中保持周向静止的导向槽40,该结构便于在螺母副32上升过程中带动锁杆2转动,从而适应上锁及解锁状态。
如图3、4、6所示,上述导向槽40包括第一竖槽41、第二竖槽42及第一滑道401、第二滑道402、第三滑道403、第四滑道404。具体的,换向套4的内周壁开设有沿轴向延伸且对称布置的第一竖槽41、第二竖槽42,该第一竖槽41、第二竖槽42将换向套4内壁分隔为相对布置的第一区域4a、第二区域4b,第一区域4a中开有自第一竖槽41中下部斜向上、向第一区域4a中央部位延伸的第一滑道401,第一竖槽41中上部连通有斜向下、向第一区域4a中央部位延伸的第二滑道402,该第二滑道402的下端与第一滑道401的上端相衔接且自衔接处竖向向下延伸形成第三滑道403,该第三滑道403在靠近上端处斜向上延伸形成与第二竖槽42相连通的第四滑道404,相应的,第二区域4b中开有与第一区域4a中对称布置的滑道结构,从而与第一区域4a的导向槽40共同形成在换向套4周向上往复循环的导向结构,定位柱321有两组且分别与第一区域4a、第二区域4b上的导向槽配合。采用上述结构可实现以下动作过程:上锁时,锁杆上升→锁杆旋转90°→锁杆下拉→上锁;解锁时,锁杆上升→锁杆旋转90°→锁杆下拉复位→解锁;并且,在上锁与解锁过程中,锁杆可以不顶高门体的情况下就能实现,提高了上锁、解锁效率,而在需要顶高门体时,可通过第一滑道401、第二滑道402、第三滑道403独立实现,在该过程中,锁杆2经过正90°、-90°转动后使限位块21保持在原位置不变,功能性更突出,方便操作。
在本实施例中,第一竖槽41中在靠近第一滑道401上端处设置有在定位柱321上升过程中限制其沿第一竖槽41上移而仅能沿第一滑道401移动的第一限位台阶411。第一滑道401与第二滑道402的衔接处设置有允许定位柱321自第一滑道401滑入第二滑道402中而限制定位柱321自第二滑道402进入第一滑道401中的第二限位台阶412。第二滑道402与第一竖槽41的衔接处设置有允许定位柱321自第二滑道402滑入第一竖槽41中而限制定位柱321自第一竖槽41进入第二滑道402中的第三限位台阶413。第三滑道403与第二滑道402的衔接处设置有允许定位柱321自第二滑道402滑入第三滑道403中而限制定位柱321自第三滑道403进入第二滑道402中的第四限位台阶414。第四滑道404与第二竖槽42的衔接处设置有允许定位柱321自第四滑道404滑入第二竖槽42中而限制定位柱321自第二竖槽42进入第四滑道404中的第五限位台阶415。上述结构有利于提高门锁结构的可靠性。
如图5所示,本实施例的门锁结构还包括能在断电状态下驱动丝杆31转动的驱动机构7,该驱动机构7包括第一齿轮71、第二齿轮72、弹性件73及拉绳74,第一齿轮71与丝杆31相连接且随丝杆31同步转动,第二齿轮72通过滑槽76与滑块75的配合结构能来回移动地设于第一齿轮71旁侧,且能在靠近第一齿轮71状态下与第一齿轮71啮合,弹性件73为弹簧,连接于滑块75与支架1上,使第二齿轮72始终保持远离第一齿轮71的趋势,拉绳74的第一端缠绕于第二齿轮72上,第二端为拉动端,用于驱动第二齿轮72克服弹性件73的弹力靠近第一齿轮71并转动。采用上述结构,在断电状态下,如果需要将门体6打开,拉动拉绳74,使第二齿轮72克服弹性件73的弹力靠近第一齿轮71并与第一齿轮71相啮合,继续拉动拉绳74,第二齿轮72转动带动第一齿轮71转动,进而带动丝杆31转动。
本实施例的门锁结构a设于箱体5的外侧壁上且锁杆2竖向布置,门体6上开有供锁杆2上端穿过的锁口61。本实施例的限位块21为一字状结构,锁口61也为相应的长条状结构。为了便于装配,锁杆2的上部和下部可以为分体结构,锁杆2的外周还可以套置防护管套8。
使用本实施例的清洗机,需要上锁时,电机驱动丝杆31转动,带动螺母副32上升,在螺母副32上升过程中,如图7所示,定位柱321沿第一竖槽41下段上升,使锁杆2顶部的限位块21穿过锁口61,定位柱321进入第一滑道401,在沿第一滑道401上移过程中,带动螺母副32转动90°,使限位块21与锁口61交错,丝杆31反向转动,如图8所示,沿第三滑道403下降后完成上锁过程;需要解锁时,电机驱动丝杆31转动,如图9所示,定位柱321沿第三滑道403上升后,进入第四滑道404,在沿第四滑道404上移过程中,带动螺母副32转动90°,使限位块21与锁口61对齐,定位柱321滑入第二竖槽402中,丝杆31反向转动,如图10所示,沿第二竖槽42下降后完成解锁过程;需要顶高门体6排气时,电机驱动丝杆31转动,如图11所示,定位柱321沿第一竖槽41下段、第一滑道401、第二滑道402上升后进入第一竖槽41上端,将门体6顶高,可排除箱体5内蒸汽,在该过程中,锁杆2先转动90°,再转动-90°,而使限位块21与锁口61仍保持对齐状态,丝杆31反向转动,如图12所示,定位柱321沿第一竖槽41下降后可打开门体6。
- 一种门锁结构及应用有该门锁结构的清洗机
- 一种门锁结构及应用有该门锁结构的清洗机