用于指导用户定位机器人的系统
文献发布时间:2023-06-19 09:54:18
本申请为申请日是2017年02月27日、申请号是201780013176.2、发明名称是“用于指导用户定位机器人的方法和系统”的发明专利申请的分案申请。
本申请主张2016年2月26日提交的序列号为62/300,234的美国临时专利申请的优先权,其通过引用并入本文。
技术领域
本发明通常涉及机器人和计算机辅助手术领域;特别是,基于工作空间和任务要求动态定位手术机器人的新的有用的方法和系统。
背景技术
机器人外科手术已成为许多需要高精度的复杂手术的首选医疗技术。计算机辅助手术设备如机器人,越来越受欢迎,作为术前计划和精确执行计划的工具,以确保假体在患者骨骼内的准确最终位置和方向,从而改善长期临床结果并与手动手术相比提高假体的生存率。通常,计算机辅助手术系统包括两个部件,交互式术前计划软件程序和计算机辅助手术装置,其利用来自软件的术前数据来帮助外科医生精确地执行手术。
传统的交互式术前规划软件从患者的计算机断层摄影(CT)或磁共振成像(MRI)图像数据集生成患者的骨骼解剖结构的三维(3-D)模型。制造商的假体的一组3-D计算机辅助设计(CAD)模型预先加载到软件中,允许用户将所需假体的组件放置到骨骼解剖结构的3-D模型中,以指定假体与骨骼的最佳配合、位置和方向。最终手术计划数据可以包括用于手术设备的指令,例如切割文件中的一组点或一组触觉虚拟边界,以精确地修改组织的体积或帮助外科医生修改组织以实现计划目标。
通过机器人辅助执行的常规手术治疗是全部关节置换和部分关节置换。关节置换(也称为原生关节成形术)是一种手术治疗,其中关节的关节连接表面被假体部件替换。关节置换已经成为一种成功的手术方式,尤其适用于臀部、膝盖、肩部以及脚踝,并且可以让人们恢复功能,同时大大减少与骨关节炎相关的疼痛。用于执行全部关节置换和部分关节置换的商业机器人系统包括TSolution One
为了利用机器人系统执行关节置换手术,机器人相对于患者的正确定位是关键的。例如,使用TSolution One
当前方法的主要问题是在用机器人接近患者之前受限于用于机器人基座的最佳位置的先验信息。因此,如果机器人系统确定末端执行器工具不能执行相对于患者已经固定的基座的手术任务,则可能需要重新定位基座并重新配准到骨骼。此外,无法保证基座的新位置适合执行手术任务。还有可能的是,当基座相对于解剖结构的位置改变时,这导致指定的点或边界也在机器人的工作空间内改变。其中一些点或边界可能会被推出工作空间并变得无法访问。有时,机器人的高度在基座高度方面的变化是足够的(即,操纵臂的向上或向下平移),而在其他情况下,基座的位置需要相对于解剖结构的位置完全重新定位。这在全膝关节置换术(TKA)的情况下变得更加重要,其中末端执行器工具经常被多次重新定向。所有这些问题都可以大大增加执行操作所需的时间,特别是如果目标解剖结构需要固定到机器人系统上(例如,参见美国专利No.5,086,401中所述的机器人骨骼固定)。
在许多情况下,计算机辅助也被限制为具有基于有限输入的切割参数的手术计划的执行,例如,限于与特定假体相关的切割腔的尺寸的输入,以及假体在骨骼模型中的位置。因此,外科医生仍必须手动应对软组织问题。此外,在定位基座之前,还应当解决机器人系统的其他参数。这可以包括操纵臂如何铰接以执行任务以及这些关节中的任何一个是否可能导致诸如奇点故障之类的故障或错误。外科医生或外科手术团队可能偏好机器人系统可能以其他方式介入的操作现场的特定接入点或走廊。如果存在光学跟踪系统,则应当定位基座以在整个手术中保持任何跟踪标记和跟踪系统之间的视线。通过简单地猜测解剖结构旁边的基座的位置,这些参数将不是最佳的。
最后,一旦确定了基座的最佳位置,就需要以直观和准确的方式将该位置传达给手术团队。基座位置的几毫米可能对手术治疗工作流程和整个手术时间产生影响。
因此,需要一种系统和方法,根据任务要求、操纵器要求、或用户偏好,相对于患者的解剖结构最佳地定位或重新定位机器人系统以执行手术计划。还需要直观地向用户指示机器人系统的最佳位置。
发明内容
提供了一种用于将机器人定位手术室中的方法,所述的手术室包括手术台,该机器人具有可移动基座、操纵臂以及末端执行器工具。该方法包括:评估可移动基座在手术室中的初始位置,该机器人具有程序化的手术计划;使用防撞移动软件将可移动基座从初始位置移向手术台到第一确定位置;阻止可移动基座;并且操纵机械臂和末端执行器工具。
提供了一种用于将机器人定位手术室中的方法,手术室中在包括其上置有骨骼的手术台,该机器人具有可移动基座、操纵臂、附接到操纵臂的末端执行器工具、以及包括手术计划程序和硬件的计算机,以将计划传达给操纵臂。该方法包括设定操纵臂的特定位置和方向(POSE)以形成末端执行器工具的轴线,该轴线表示骨骼的轴线的期望位置,并且移动可移动基座或配准骨骼以大致对准配准骨骼的轴线和末端执行器工具的轴线。
提供了一种用于将机器人定位在包括手术台的手术室中的方法,该机器人具有可移动基座、操纵臂和末端执行器工具。该方法包括:确定可移动基座在手术室中的第一位置,该机器人具有程序化的手术计划;将可移动基座从初始位置朝向手术台移动到确定的第一位置;停止可移动基座;并且结合操纵臂和末端执行器工具。
提供了一种在地板上操作的机器人手术系统。机器人手术系统包括计算机辅助手术机器人,其具有基座、从机器人伸出的末端执行器工具、基准标记阵列和用于相对于对象骨骼跟踪或导航末端执行器的光学跟踪系统。手术系统还包括将在对象骨骼上执行的手术计划、以及激光器、2-D图像或全息图像投影仪,以将机器人的基座的期望位置的图像投影到地板上。以符合手术计划的至少一个操作。
附图说明
参照以下附图进一步详细说明本发明。这些图不是要限制本发明的范围,而是说明其某些属性。
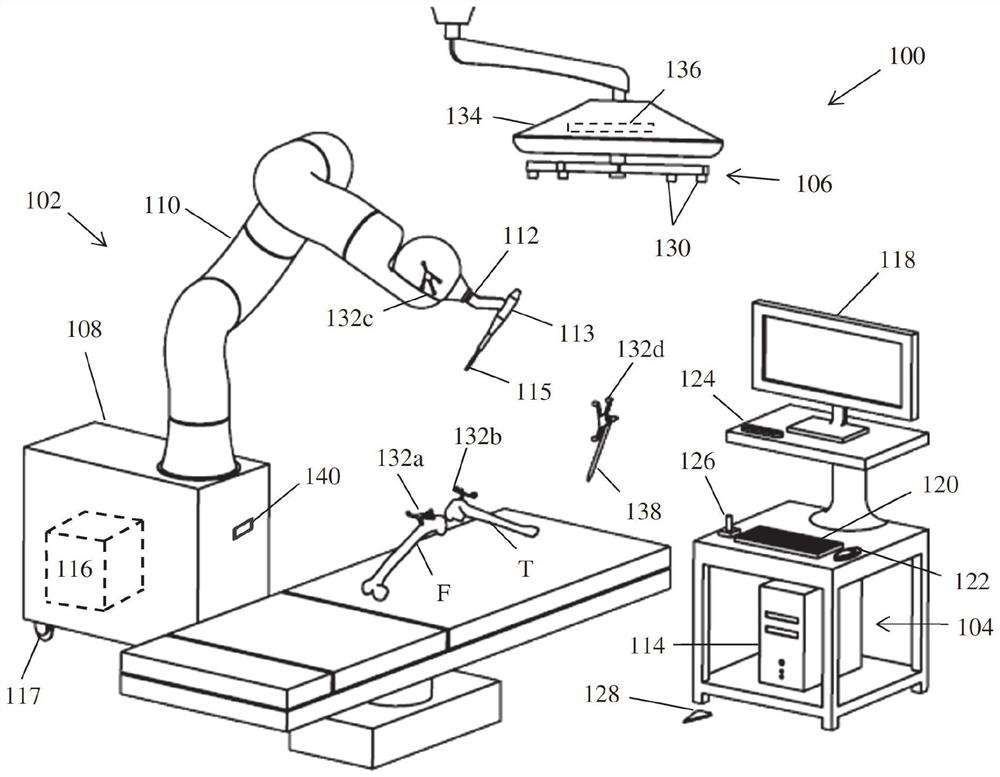
图1描绘了根据本发明的实施例的具有手术系统的创造性手术室,该手术系统具有机器人计算机辅助设备、计算机系统和跟踪系统,其中机器人设备具有定位指示器以向用户提供机器人相对于患者的解剖结构的最佳位置的指示;
图2示意性地描绘了根据本发明实施例的具有机器人计算机辅助设备的创造性手术室,该机器人计算机辅助设备具有指示基座的最佳位置的指示器,以及用于将设备的基座引导到最佳位置的其他传感器;
图3示意性地描绘了根据本发明的实施例的增强现实设备(augmented realitydevice)用于显示机器人手术设备的基座的最佳位置;以及
图4示意性地描绘了根据本发明实施例的具有机器人计算机辅助设备的创造性手术室,其没有任何附加指示器或传感器,其中根据机器人操纵臂的方向将机器人基座引导到最佳位置。
具体实施方式
本发明可用作一种基于工作空间和任务要求、操纵器要求或用户偏好在外科手术中动态定位或重新定位机器人的系统和方法。本发明的系统和方法的实施例在手术治疗之前或期间准确地确定并指示机器人相对于患者的解剖结构的最佳位置。
以下对本发明优选实施例的描述并非旨在将本发明限制于这些优选实施例,而是使本领域技术人员能够制造和使用本发明。这里描述的本发明说明性地使用全膝关节置换术(TKA)作为例子。尽管全膝关节置换术是可以从所公开的实施例中受益的一种手术,但是其他手术治疗可以说明性地包括对膝关节、髋关节、脊柱、肩关节、肘关节、踝关节、颌、肿瘤部位、手或脚的关节、以及其他适当的手术部位的手术。
参考附图,图1示出了用于机器人辅助手术治疗的手术系统和手术室(OR)的实施例。手术系统100通常包括手术机器人102、计算机系统104以及跟踪系统106。
手术机器人102包括可移动基座108、连接到可移动基座108的操纵臂110、位于操纵臂110的远端处的末端执行器凸缘112、以及具有工具尖端115的末端执行器工具113,其中工具113z可拆卸地连接到末端执行器凸缘112。可移动基座108可包括一组轮子117以操纵基座108,其可使用诸如液压的制动机构固定到位。操纵臂110包括各种关节和连杆,以各种自由度提供控制或运动。关节可以是棱柱形、旋转形或其组合。工具113可以是与患者的解剖结构接触或在患者的解剖结构上执行工作的任何装置,包括例如毛刺、锯、端铣刀、切割器、激光消融装置、镊子、内窥镜、电烙装置、钻头、针式驱动器、铰刀、超声波喇叭、导管导向器或探头。工具113和操纵臂110由来自计算机系统104的命令控制。
计算机系统104通常包括具有处理器的计划计算机114;具有处理器的设备计算机116;具有处理器的跟踪计算机136以及外围设备。计划计算机114、设备计算机116以及跟踪计算机136可以是单独的实体、单个单元或其组合,这取决于手术系统。外围设备允许用户与手术系统组件对接,并且可以包括:一个或多个用户界面,例如显示器或监视器118;以及用户输入机构,例如键盘120、鼠标122、悬挂(pendent)124、操纵杆126、脚踏板128或监视器118可具有触摸屏功能。
计划计算机114包括硬件(例如,处理器、控制器以及存储器)、软件、数据和实用程序,其优选地专用于术前或术中的外科手术过程的规划。这可以包括读取医学成像数据、分割成像数据、构建三维(3D)虚拟模型、存储计算机辅助设计(CAD)文件、提供各种功能或小窗口(widgets)以帮助用户规划外科手术、以及产生手术计划数据。最终手术计划可以包括具有便于配准的点的三维骨骼模型、患者识别信息、工作流程指令、以及用于修改相对于解剖结构确定的组织体积的操作数据,例如切割文件中的一组点以自动修改骨骼体积,由在所确定的边界内触摸约束工具确定的一组虚拟边界以修改骨骼,一组平面或钻孔以在骨骼中钻取针脚,或指令的图形导航集合用于修改组织。从计划计算机114生成的数据可以通过手术室(OR)中的有线或无线连接传送到设备计算机116和/或跟踪计算机136;或者,如果计划计算机114位于OR之外,则通过非瞬态数据存储介质(例如,光盘(CD)、便携式通用串行总线(USB)驱动器)传输。
设备计算机116可以容纳在可移动基座108中并且包括优选地专用于手术设备102的操作的硬件、软件、数据和实用程序。这可以包括手术设备控制、机器人操纵器控制、处理运动和反向运动学数据、配准算法的执行、校准程序的执行、手术计划数据的执行、坐标变换处理、向用户提供工作流程指令、以及利用来自跟踪系统106的位置和方向(POSE)数据。
手术系统100的跟踪系统106包括两个或多个光学接收器130,以检测唯一地布置在刚性主体上的基准标记(例如,逆向反射球、有源发光二极管(LEDs))的位置。设置在刚性主体上的基准标记统称为基准标记阵列132,其中每个基准标记阵列132具有基准标记的唯一布置,或者如果标记是有源LEDs(active LEDs)则具有唯一的发射波长/频率。美国专利No.6,061,644中描述了光学跟踪系统的一个例子。跟踪系统106可以内置在手术灯134中,手术灯134位于吊杆、支架142(如图2所示)上、或者内置在OR的壁或天花板中。跟踪系统106可以包括跟踪硬件136、软件、数据和实用程序,以确定局部或全局坐标系中的对象(例如,股骨F、胫骨T、手术装置102)的POSE。目标的POSE在此统称为POSE数据,其中该POSE数据可以通过有线或无线连接传送到设备计算机116。或者,设备计算机116可以使用直接从光学接收器130检测到的基准标记的位置来确定POSE数据。
使用从光学接收器130检测的位置数据和诸如图像处理、图像滤波、三角测量算法、几何关系处理、配准算法、校准算法和坐标变换处理的操作/方法来确定POSE数据。例如,可以校准具有附接的探针基准标记阵列132d的数字化仪探针138的POSE,使得探针尖端连续地已知,如美国专利No.7043961中所述。尖端115的POSE或末端执行器工具113的工具轴线相对于设备基准标记阵列132c是已知的,可以使用如美国专利No.62/128857中所述的校准方法。设备基准标记132c描绘在操纵臂110上,但也可以定位在基座108或工具114上。可以执行配准算法,以确定POSE和/或骨骼(例如,股骨F、胫骨T)、骨骼基准标记阵列(132a,132b)、手术计划、及其任何组合之间的坐标变换,使用本领域已知的配准方法,例如美国专利No.6,033,415和8,287,522中所述的那些。
在手术之前,将设备跟踪阵列132c组装到手术机器人102时,坐标系统的POSE,132c和113,相对于彼此固定并存储在存储器中以在手术期间(例如,参见美国专利公开号20140039517A1)相对于骨骼解剖结构(例如,股骨F和胫骨T)精确地跟踪末端执行器工具113。在更新机器人和手术计划坐标变换的过程期间,计算机系统104可以使用POSE数据,使得手术机器人102可以在任何骨骼移动发生的情况下准确地执行手术计划。应当理解,在某些实施例中,其他跟踪系统可以与手术系统100结合,例如电磁场跟踪系统或机械跟踪系统。机械跟踪系统的一个例子描述于美国专利No.6,322,567中。
由于如上所述的将基座108相对于解剖结构定位的关键性,可以使用严重依赖于全局和局部优化算法的若干算法来确定机器人的最佳位置。优化算法可以使用机器人系统的运动学模型,以及患者解剖结构的已知POSE(在用机器人接近患者之前,通过将手术计划配准到骨骼上来确定)以确定基座的最佳位置,以在手术计划中定义的操作体积内实现所需的可达性,例如切割文件中的点、一组边界或一组钻孔或平面切口。优化算法还可以包括用于确定最佳位置的附加约束。约束可以包括操纵器要求,例如在执行手术计划时避免奇点、关节限制或操纵臂的碰撞。约束可以包括视线考虑,其中基准标记阵列相对于跟踪系统的位置可以针对特定基座位置或操纵臂配置进行优化。约束可以进一步包括用户对基座位置的偏好,以向用户提供到操作场所的特定接入点或走廊,其中机器人仍然能够执行手术计划。偏好还可以包括如果使用被动或触觉手术机器人,基座应如何定向以容易地抓握并操纵操纵臂或末端执行器工具。算法约束还可以包括患者因素,例如患者的体重指数(BMI)、手术侧(例如,左股骨或右股骨)、或目标解剖结构的暴露量。用户偏好和患者因素约束可以在手术室或手术计划中定义,并在运行优化算法之前加载到跟踪系统106或计算机系统104中。通过在相对于解剖结构/平面图的各种潜在基座位置处使用运动学模型,也可以结合或代替约束优化算法来执行操纵器关节和连杆的模拟,直到找到基座的最佳位置以适应这些操纵器的要求。最终,优化算法和/或模拟的输出,即基座的最佳位置,然后可由手术室(OR)人员使用以相对于解剖结构定位或重新定位机器人。
应当注意的是,在某些实施例中,在定位机器人系统之前,需要目标骨骼相对于特定世界坐标系(certain world coordinate frame)的位置和取向。例如,如果存在跟踪系统,则可以使用数字化仪探针138的部分或完全配准过程来确定骨骼到跟踪系统的当前位置,其中可以在配准之前将手术计划数据上载到跟踪系统106。在特定实施例中,用户可以在术中规划该过程并使用骨骼变形配准技术(bone-morphing registration techniques)(通常在无成像计算机辅助程序中使用)来确定骨骼相对于世界坐标系的POSE。利用世界坐标系中已知的骨骼,使用上述优化算法和方法之一确定机器人基座相对于骨骼的最佳位置和取向。一旦确定了最佳位置,就需要以直观和准确的方式将位置传达给OR工作人员。
在图2中所示的发明实施例中,激光、2-D图像或全息图像144可用于在地板146上显示机器人102的基座108的最佳位置。指示器可指示绝对坐标空间或相对于机器人102的当前位置的位置。绝对指示器通过将机器人基座108的足迹144投射到地板146上来显示机器人在OR中的最佳位置。当机器人朝向最佳位置的位置移动时,投射图像144可以更新,因此足迹144保持在绝对坐标空间中的最佳位置。相对指示器示出了基座108应当朝向最佳位置移动或旋转的方向,例如指示箭头150。投影仪140,例如微型投影仪,安装在例如机器人102的基座108上或者在操纵臂110上。投影仪140也可以安装在基座108的下方,因此当基座108在图像144(例如,在145处从基座的底部发出的投影)的顶部移动时,图像144可以连续地更新。对于该实施例,除了骨骼的位置(例如,股骨F或胫骨T)之外,还需要机器人102的基座108的位置。机器人102的基座108的位置可以通过将附接到机器人的臂的设备基准标记阵列132c暴露到跟踪系统106来确定。
在本发明的实施例中,机器人基座108可以配备有激光距离测量传感器(LIDARS)148和/或相机,以利用机器视觉来定位机器人102。基座108使用自主机器人算法来安全地自我导航到最佳位置,同时避免与OR中的人员和物体发生碰撞。该实施例需要机器人102的基座108的位置,其可以通过跟踪系统106确定,或者可以利用机上设备(on-boardequipment)(例如,测量传感器、相机)和加载在设备机器人116的映射软件(mappingsoftware)来确定。可以理解的是,与在动态环境中移动的机器人相比,OR是相对受控的环境并且易于映射。自动机器人基座108可以通过动力驱动轮系统自动移动,该动力驱动轮系统包括执行映射、定位、碰撞避免以及路径规划功能的导航模块。通过在OR工作台135的头部周围形成一个禁区(exclusion zone),可以同时避免可能导致严重碰撞或干扰程序的患者大小的变化和可能导致严重碰撞或干扰程序的潜在干扰,其在图1和图2中被描绘为工作台135的两个小部分。
在某些发明实施例中,学习占据地图(occupancy map)以将并发映射(concurrentmapping)和定位问题组合为最大似然估计问题,其中试图确定给定数据的最可能的映射。似然最大化考虑了量距(odometry)的一致性,因为小错误比大错误更可能,并且折扣感知一致性,如S.Thrun,D.Fox和W.Burgard,一种接近移动机器人的并发映射和本地化的概率方法,机器人学习,31,1998所详述。与在开放空间中操作的机器人相比,手术机器人基座108在OR的受控和可预测的环境中起作用。受控环境允许本发明的机器人在Markovlocalization的假设下操作D.Fox,W.Burgard,以及S.Thrun,Markov Localization动态环境中的移动机器人,Journal of Artificial Intelligence Research 11(1999)391-427。它使用贝叶斯规则(Bayes rule)来合并传感器读数,并使用卷积(convolution)来合并机器人运动。最初,机器人现在知道它的POSE;因此,P r(ξ(0))均匀分布。在根据更新规则(1)合并一个传感器读数(例如,RFID、激光或相机)之后,分布P r(ξ(1))。在向前移动之后,并且在结合另一传感器读数之后,最终分布P r(ξ(2))以正确姿态原始接近传感器读数为中心以及期望的机器人最终位置,基于预选约束来计算机器人的路径和速度,预选约束包括机器人必须始终能够在撞击之前完全停止同时与动态约束(例如,扭矩限制)竞争。软约束用于平衡程序通过最快和最短路径直接移动到最终位置的愿望。结合起来,这些约束确保了安全和平稳的局部导航。
路径规划器计算从手术动作的一个位置到另一个位置的路径。防撞移动软件允许机器人基座108在OR中操纵。在一些发明实施例中,除了自动制动能力以避免碰撞之外,在可以导致碰撞的运输轨迹正在进行中的情况下提供警报,无论是在自动控制还是手动控制下。
在特定的发明实施例中,参照图3,说明性地包括但不限于谷歌眼镜、微软全息镜头或ODG眼镜的增强现实设备154用于显示机器人102在OR内的最佳位置。可以在增强现实设备154的视野156中示出处于最佳位置的机器人基座144的轮廓。相对箭头指示器150也可以在视野156中示出。增强现实设备154的POSE可以从增强现实设备158的内部传感器(惯性测量单元(IMU),指南针等)或者从可以通过跟踪系统106看到的安装在现实设备154上的增强设备基准标记阵列132d收集。
在特定的发明实施例中,参考图4所示,操纵臂110可以设定表示骨骼轴线相对于工具113的轴线的期望位置的特定POSE(certain POSE)。然后,用户可以移动机器人102的基座108,使得骨骼(例如,股骨F或胫骨T)通过定位机器人102的基座108或患者解剖结构(即,沿着轴线152对准工具轴线和骨骼轴线)与工具113的轴线大致对齐。该方法不需要跟踪系统106或配准信息,并且仅取决于对手术计划执行的分析以设定特定POSE。换句话说,无论患者的当前位置如何,机器人102都设定期望的POSE。在该实施例中,操纵臂110的初始POSE可以考虑操纵器要求、医生偏好和患者因素。如果操纵臂110具有大于6自由度(DOF),则冗余自由度提供了更大的灵活性以实现操纵器要求、医生偏好和患者因素。
在本发明的实施例中,配准算法可用于确定机器人102的合适位置,然后机器人102设定包括正确基座高度的姿势。该方法的输入可以是包括患者的位置和方向或者至少可以是解剖学的界标的完整配准信息,例如在膝盖手术的情况下膝盖的顶部。
还提供了图形用户界面(GUI)方法,其中监视器118上的显示器用于向用户提供定位信息。例如,如果已知机器人102相对于骨骼/患者的位置和方向,则机器人基座108相对于患者的当前位置和最佳位置都显示在屏幕上。当移动机器人102的基座108时,更新屏幕以提供将机器人102移动到最佳位置的视觉辅助。在另外的实施例中,显示骨骼的侧视图和俯视图以及机器人的基座108的足迹,其中骨骼的颜色改变以指示骨骼是否在工作空间的可到达部分内,并且显示将通向工作空间中的可到达点的基座108的运动方向。在特定实施例中,在GUI上显示目标符号(例如,十字准线)。目标符号可以首先在屏幕上放大显示,然后在基座移动到最佳位置时聚焦到基座的最佳位置。
对于在定位期间机器人的精细运动,在本发明的实施例中,可以使用象鼻方法(elephant trunk method)。在象鼻方法中,医生使用机器人102的工具组件113或操纵臂110作为操纵杆来移动机器人102。这需要可通过电动转向移动的动力机器人基座108。象鼻方法的描述在美国临时专利申请号62/142,624中,在此引入作为参考。
应当理解的是,上述方法可以扩展到附接到机器人系统的被动数字化仪臂的范围,如美国专利No.6,033,415中所述,其全部内容并入本文。优化算法可以进一步确定数字化仪或机器人基座108的最佳位置,使得数字化仪臂符合任何工作空间、任务、用户或患者要求。
在已经定位基座108之后,跟踪系统106可以验证基座108处于最佳位置,或者至少验证满足工作空间和任务要求。监视器118可以显示用户确认基座108的位置的提示。在特定实施例中,用户可能想要重新定位基座108以获得对操作现场中或周围的特定位置的访问,或者具有更好的抓地力来操纵被动或触觉操纵臂。监视器118可以显示基座108相对于解剖结构的当前位置。可以显示三元组或旋转光标(triad or rotation cursor),其允许用户虚拟地调整监视器118上的基座的位置。跟踪系统106或计算机系统104可以提供指示虚拟调整的位置是否仍将适应工作空间或任务要求的反馈。因此,用户知道在实际移动基座108之前基座可以重新定位的位置。一旦确定了新位置,就可以使用上述任何方法来重新定位机器人102的基座108。
其他实施例
尽管在前面的详细描述中已经呈现了至少一个示例性实施例,但是应该理解存在大量的变型。还应当理解,示例性实施例或多个示例性实施例仅是示例,并不旨在以任何方式限制所描述的实施例的范围、适用性或配置。相反,前面的详细描述将为本领域技术人员提供用于实现示例性实施例或示例性实施例的便利路线图。应当理解,在不脱离所附权利要求及其合法等同物所阐述的范围的情况下,可以对元件的功能和布置进行各种改变。
前面的描述是对本发明的特定实施例的说明,但并不意味着对其实践的限制。以下权利要求,包括其所有等同物,旨在限定本发明的范围。
- 用于指导用户定位机器人的系统
- 用于便携式输液系统的指导用户帮助系统