一种四自由度机器人
文献发布时间:2023-06-19 10:33:45
技术领域
本发明涉及机器人技术领域,特别是涉及一种四自由度机器人。
背景技术
传统的scara机器人也包含4个自由度,分别是第一轴的旋转,第二轴的旋转,第三轴第四轴复合的升降及旋转。传统的scara机器人末端输出的是第四自由度水平面的旋转运动,故只适合某一固定平面的物品抓取。如果需抓取物体的抓取平面角度变化则无法抓取,某些特定应用场合需要一种末端能旋转一定角度的抓取,以适应抓取物体抓取面变化的场合,如抓取竖直放置的物体,斜面体等。再一种工况,机器人前端安装的工具需要实现一个竖直面内角度的变化,例如安装一台激光脱毛仪,对一个仰卧人体进行脱毛操作,传统的scara机器人只能扫描一个面,而人体是立体的,传统scara机器人不能实现人体两侧的脱毛,这就需要一种可以实现角度偏转的机器人携带激光脱毛仪进行扫描。
发明内容
本发明的目的是提供一种四自由度机器人,以解决上述现有技术存在的问题,实现第一轴的旋转,第二轴的旋转,第三轴的升降及第四轴的竖直面内旋转,该种结构配合抓手适合对任意角度平面内物体的抓取。
为实现上述目的,本发明提供了如下方案:
本发明提供一种四自由度机器人,包括包括基座、大臂、小臂、滚珠花键、滚珠丝杠、齿轮箱和输出法兰盘;所述基座与所述大臂一端相连接,所述大臂另一端和所述小臂一端相连接,所述小臂另一端连接安装所述滚珠花键和所述滚珠丝杠,所述滚珠丝杠的底端连接所述齿轮箱,所述滚珠花键的底端穿过所述齿轮箱,实现运动变向,所述输出法兰盘安装于所述齿轮箱上,所述输出法兰盘为外部设备接口;
所述基座内设置有驱动所述大臂旋转的第一伺服电机,所述小臂顶部设置有第二伺服电机、第三伺服电机和第四伺服电机,所述第二伺服电机驱动所述小臂旋转;所述第三伺服电机通过设置于所述小臂内的第一带轮传动机构连接的所述滚珠花键上的滚珠花键螺母,带动滚珠花键实现旋转;所述第四伺服电机通过设置于所述小臂内的第二带轮传动机构连接的所述滚珠丝杠上的滚珠丝杠螺母,带动滚珠丝杠实现升降,所述滚珠丝杠的底端通过连接法兰盘连接所述齿轮箱,带动所述齿轮箱升降;
所述齿轮箱内设置有齿轮传动机构,所述滚轴花键的底端通过所述齿轮传动机构连接所述输出法兰盘,实现驱动所述输出法兰盘旋转。
优选地,所述基座与所述大臂之间设置大臂法兰板和大臂谐波减速器,所述第一伺服电机通过所述大臂法兰板与所述大臂谐波减速器连接,所述大臂谐波减速器与所述大臂连接。
优选地,所述第二伺服电机通过小臂法兰板与小臂谐波减速器连接,所述小臂谐波减速器嵌于所述大臂的末端。
优选地,所述第一带轮传动机构包括第一同步带轮、第一同步带和第二同步带轮,所述第三伺服电机的电机轴伸入所述小臂内的端部安装有第一同步带轮,所述第一同步带轮通过第一同步带连接所述第二同步带轮,所述第二同步带轮连接所述滚珠花键螺母。
优选地,所述滚珠花键螺母通过轴承组与所述小臂的臂底连接。
优选地,所述第二带轮传动机构包括第三同步带轮、第二同步带和第四同步带轮,所述第四伺服电机的电机轴伸入所述小臂内的端部安装有第三同步带轮,所述第三同步带轮通过第二同步带连接所述第四同步带轮,所述第二同步带轮连接所述滚珠丝杠螺母。
优选地,所述滚珠丝杠螺母由支架支撑,所述支架固定在所述小臂上。
优选地,所述齿轮传动机构包括第一锥齿轮和第二锥齿轮,所述滚珠花键末端通过轴承隔套组一及压板安装固定所述第一锥齿轮,其中轴承隔套套设于所述滚珠花键的外部,并嵌于所述齿轮箱上,所述压板安装在所述滚珠花键的底端,将所述第一锥齿轮压紧在所述压板与所述轴承隔套之间,第一锥齿轮横向设置,第二锥齿轮竖向设置,第二锥齿轮与第一锥齿轮啮合连接,所述第二锥齿轮通过键连接在所述输出法兰盘自带的轴上,驱动所述输出法兰盘旋转;所述输出法兰盘的轴穿设在所述齿轮箱的前后侧壁上,与所述齿轮箱的连接处分别由轴承隔套组二和轴承隔套组三支撑,且轴体上还套设有长隔套,轴体的末端则由锁紧螺母锁紧并固定。
本发明相对于现有技术取得了以下有益技术效果:
本发明提供的四自由度机器人,大臂旋转为第一轴的旋转,小臂旋转为第二轴的旋转,滚珠丝杠的升降为第三轴的升降,滚珠花键旋转通过齿轮传动机构转化为输出法兰盘在竖直面内旋转,能够实现机器人的第一轴的旋转,第二轴的旋转,第三轴的升降及第四轴的竖直面内旋转,该种结构配合抓手适合对任意角度平面内物体的抓取。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
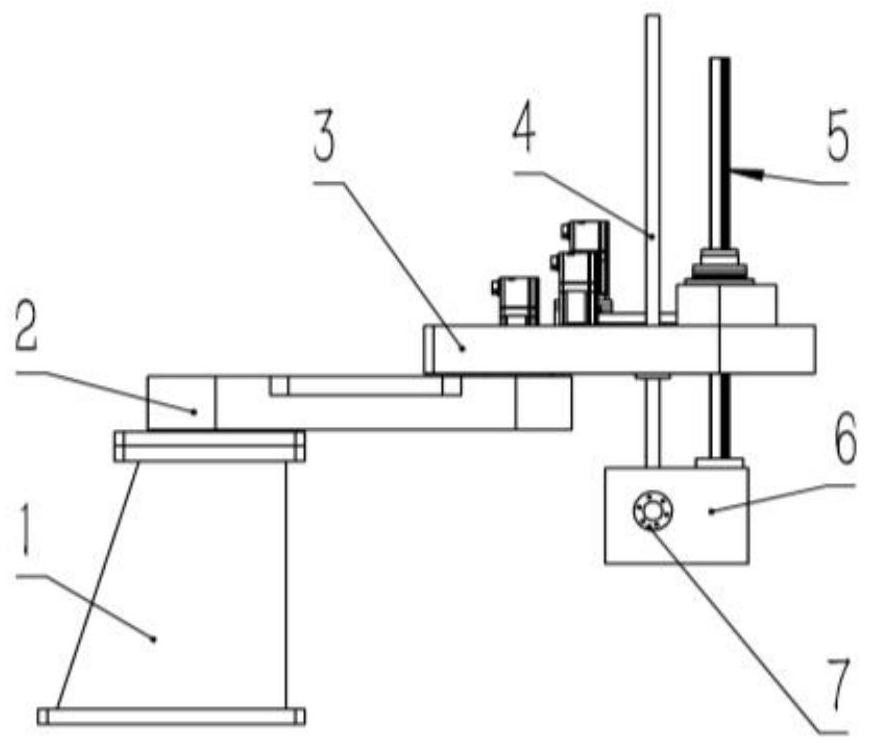
图1为本发明中四自由度机器人的结构示意图;
图2为本发明中大臂与基座连接处的剖面示意图;
图3为本发明中小臂与大臂连接处的剖面示意图;
图4为本发明中小臂处的滚珠花键副部分的剖面示意图;
图5为本发明中小臂处的滚珠丝杠副部分的剖面示意图;
图6为本发明中齿轮箱的结构示意图;
图7为本发明中齿轮箱的剖面示意图;
图中:1-基座、2-大臂、3-小臂、4-滚珠花键、5-滚珠丝杠、6-齿轮箱、7-输出法兰盘、8-第一伺服电机、9-大臂法兰板、10-大臂谐波减速器、11-第二伺服电机、12-小臂法兰板、13-小臂谐波减速器、14-第三伺服电机、15-第一同步带轮、16-第一同步带、17-第二同步带轮、18-滚珠花键螺母、19-轴承组、20-第四伺服电机、21-第三同步带轮、22-第二同步带、23-支架、24-第四同步带轮、25-滚珠丝杠螺母、26-轴承隔套组一、27-第一锥齿轮、28-压板、29-第二锥齿轮、30-轴承隔套组二、31-长隔套、32-轴承隔套组三、33-锁紧螺母、34-连接法兰盘。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种四自由度机器人,以解决现有技术存在的问题。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
本实施例中的四自由度机器人,如图1所示,包括基座1、大臂2、小臂3、滚珠花键4、滚珠丝杠5、齿轮箱6和输出法兰盘7;基座1与大臂2一端相连接,大臂2另一端和小臂3一端相连接,小臂3另一端连接安装滚珠花键4和滚珠丝杠5,滚珠丝杠5的底端连接齿轮箱6,滚珠花键4的底端穿过齿轮箱6,实现运动变向,输出法兰盘7安装于齿轮箱6上,输出法兰盘7为外部设备接口;
如图2所示,基座1内设置有驱动大臂2旋转的第一伺服电机8;具体地,基座1与大臂2之间设置大臂法兰板9和大臂谐波减速器10,第一伺服电机8通过大臂法兰板9与大臂谐波减速器10连接,大臂谐波减速器10与大臂2连接。
如图1、图3所示,小臂3顶部设置有第二伺服电机11、第三伺服电机14和第四伺服电机20,第二伺服电机11驱动小臂3旋转,第二伺服电机11通过小臂法兰板12与小臂谐波减速器13连接,小臂谐波减速器13嵌于大臂2的末端;
如图4所示,第三伺服电机14通过设置于小臂3内的第一带轮传动机构连接的滚珠花键4上的滚珠花键螺母18,带动滚珠花键4实现旋转;具体地,第一带轮传动机构包括第一同步带轮15、第一同步带16和第二同步带轮17,第三伺服电机14的电机轴伸入小臂3内的端部安装有第一同步带轮15,第一同步带轮15通过第一同步带16连接第二同步带轮17,第二同步带轮17连接滚珠花键螺母18;滚珠花键螺母18通过轴承组19与小臂3的臂底连接。
如图5所示,第四伺服电机20通过设置于小臂3内的第二带轮传动机构连接的滚珠丝杠5上的滚珠丝杠螺母25,带动滚珠丝杠5实现升降,滚珠丝杠5的底端通过连接法兰盘连接齿轮箱6,带动齿轮箱6升降;具体地,第二带轮传动机构包括第三同步带轮21、第二同步带22和第四同步带轮24,第四伺服电机20的电机轴伸入小臂3内的端部安装有第三同步带轮21,第三同步带轮21通过第二同步带22连接第四同步带轮24,第二同步带轮17连接滚珠丝杠螺母25;滚珠丝杠螺母25由支架23支撑,支架23螺钉通过固定在小臂3上。
如图6、图7所示,齿轮箱6内设置有齿轮传动机构,滚轴花键的底端通过齿轮传动机构连接输出法兰盘7,实现驱动输出法兰盘7旋转。具体地,齿轮传动机构包括第一锥齿轮27和第二锥齿轮29,滚珠花键4末端通过轴承隔套组一26及压板28安装固定第一锥齿轮27,其中轴承隔套套设于滚珠花键4的外部,并嵌于齿轮箱6上,压板28安装在滚珠花键4的底端,将第一锥齿轮27压紧在压板28与轴承隔套之间,第一锥齿轮27横向设置,第二锥齿轮29竖向设置,第二锥齿轮29与第一锥齿轮27啮合连接,第二锥齿轮29通过键连接在输出法兰盘7自带的轴上,驱动输出法兰盘7旋转;输出法兰盘7的轴穿设在齿轮箱6的前后侧壁上,与齿轮箱6的连接处分别由轴承隔套组二30和轴承隔套组三32支撑,且轴体上还套设有长隔套31,轴体的末端则由锁紧螺母33锁紧并固定。
本发明中的四自由度机器人,大臂2旋转为第一轴的旋转,小臂3旋转为第二轴的旋转,滚珠丝杠5的升降为第三轴的升降,滚珠花键4旋转通过齿轮传动机构转化为输出法兰盘7在竖直面内旋转,进而实现机器人第一轴的旋转,第二轴的旋转,第三轴的升降及第四轴的竖直面内旋转,该种结构配合抓手适合对任意角度平面内物体的抓取。
本发明应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上,本说明书内容不应理解为对本发明的限制。
- 基于三自由度和四自由度并联机构的混联组合汽车喷涂机器人
- 基于三自由度和四自由度并联机构的混联喷涂机器人