带有能围绕轴线转动的传感器托架的传感器模块以及用于组装这种传感器模块的方法
文献发布时间:2023-06-19 10:44:55
技术领域
本发明涉及一种传感器模块。本发明尤其涉及一种具有能调整的传感器视野的传感器模块。此外,本发明还涉及一种用于组装这种传感器模块的方法。
背景技术
因为由现有技术公知的传感器模块经常仅能在窄的限度内调整传感器视野,所以针对不同的安装场景典型地使用特意为相应的安装场景设计的传感器模块。
发明内容
本公开文本丰富了现有技术,按本发明的传感器模块可以方便地与不同的安装场景相匹配,因为传感器视野相对壳体的取向在一个广阔的范围(例如能大于90°、大于120°或大于180°地调整)。
按本发明的传感器模块包括设置用于容纳传感器的传感器托架和壳体,其中,壳体具有两个同轴的柱形的容纳部,传感器托架的柱形的端部以能围绕轴线转动的方式支承在所述容纳部中。传感器模块设置用于,通过在壳体和传感器托架的周侧面区域之间产生力锁合或形状锁合的连接将传感器托架固定在相对壳体能调整的角位置中。
在此,术语“传感器模块”如在说明书和权利要求中使用的那样,尤其指的是这样一种装置,其从环境对传感器的影响推导出数据并且将这些数据发出给传感器模块的输出端(例如通过总线接口)。此外,术语“传感器托架”如在说明书和权利要求中使用的那样,尤其指的是这样一种构件,运行中,测量传感器(例如图像传感器)紧固在该构件处。
此外,术语“容纳部”如在说明书和权利要求中使用的那样,尤其指的是这样一种留空部,传感器托架(径向于轴线地)形状锁合地嵌接到该留空部中。此外,术语“壳体”如在说明书和权利要求中使用的那样,尤其指的是由两个半壳形成的(空心)结构,例如印制电路板和电气的/电子的构件埋入到该结构中。半壳可以由塑料或者由金属(镁、铝等)制成,并且特别是构造成冷却体或者构造用于屏蔽电磁辐射。
传感器托架优选具有柱形的轮廓。
用于传感器托架的或没有(沿径向方向)显著伸出传感器托架的传感器的壳体在安装时提供了防止与比容纳部的开口更宽的平面构件接触(或碰撞)的保护。
优选规定,在壳体和传感器托架的周侧面区域之间,
-在传感器模块的未组装的状态下没有形成力锁合或形状锁合的连接以用于实现角位置相对于壳体的调整,并且
-在传感器模块的已组装的状态下形成了力锁合或形状锁合的连接用以相对于壳体固定调整后的角位置。因此角位置在安装时还可以调整并且能以简单的方式通过安装过程固定以及因此为了运行被持久地固定。
壳体优选具有长方体形的、由两部分组成或多部分组成的空心体,该空心体带有形成在长方体形的空心体的三个侧中的连贯的开口,传感器托架的处在传感器托架的端部之间的区域通过所述开口露出。
测量方向(或传感器视野轴线)由此可以通过传感器托架例如沿壳体的上侧、前侧和下侧的方向的转动进行取向。
传感器托架的具有用于产生与壳体的力锁合或形状锁合的连接的周侧面区域的柱形区段可以由露出的区域沿轴向方向限界。
周侧面区域为了产生与壳体的形状锁合的连接优选配设有槽纹。
按照一种有利的实施方案规定,至少一个布置在壳体处的卡锁凸起至少在壳体的和/或传感器模块的已组装的状态下卡入到传感器托架的周侧面区域上的槽纹中,其中,能防止至少一个卡锁凸起沿径向方向相对于槽纹的移位以产生与壳体的形状锁合的连接并因此防止了传感器托架相对于壳体的扭转。因为壳体在这个状态下组装在一起,所以防止了相对壳体的两个壳体侧的扭转。
由此能以简单的方式达到的是,传感器托架的并且因此传感器的角位置被固定并且因此在接下来不再能改变。角位置在此可以事先预定。通过在调整预定的角位置后防止卡锁凸起从槽纹抬起,也可以在传感器模块于车辆中的运行中确保,角位置例如在振动时被保持。
此外还优选规定,至少一个卡锁凸起布置在壳体处的至少一个弹性地挠曲的臂处,其中,至少一个臂沿径向方向关于传感器托架能运动,使得至少一个卡锁凸起至少在壳体的和/或传感器模块的已组装状态下压向槽纹并由此至少部分地卡入到槽纹中。
通过弹动的或弹性的挠曲可以按情况卡入卡锁凸起。传感器托架例如可以在组装传感器模块之前还扭转,以便调整角位置。这一点由此成为可能,即,卡入到槽纹中的卡锁凸起也还可以克服臂的弹簧力从槽纹抬起并因此在传感器托架扭转时一定程度上按照棘轮连接的种类沿着槽纹在槽纹上滑动。在传感器模块的组装状态下则可以防止卡锁凸起的抬起,从而卡锁凸起卡入到槽纹中,由此防止了传感器托架的扭转。
这可以优选由此完成,即,第一按压区域在壳体的和/或传感器模块的已组装状态下与至少一个臂作用连接,使得防止了卡入到槽纹中的卡锁凸起沿径向方向相对槽纹的移位,用以产生与壳体的形状锁合的连接并因此防止传感器托架从相对于壳体调整了的角位置扭转出来。
第一按压区域因此负责,限制挠性的臂的运动,由此将卡锁凸起在卡入的状态下保持在槽纹中。由此在这种状况下、这就是说在已组装的状态下以简单的方式促成了形状锁合的连接的形成。
优选还规定,至少一个卡锁凸起在壳体的和/或传感器模块的未组装的状态下
-至少部分卡入到在传感器托架的周侧面区域上的槽纹中并且卡锁凸起沿径向方向相对于槽纹的移位是可能的,或者
-没有卡入到在传感器托架的周侧面区域上的槽纹中,
用于实现传感器托架相对于壳体的扭转,以便相对壳体调整角位置。
第一按压区域或另一个机构因此在已组装的状态下或者在安装之后才负责形状锁合的连接,因此事先或者在安装期间对传感器托架的角位置的调整仍是可能的。在此,在使用传感器托架之后和组装壳体之前就已经可能出现的是,卡锁凸起贴靠在槽纹处或者卡入到槽纹中并且臂在传感器托架扭转进入到期望的角位置时弹性地挠曲,而卡锁凸起则通过槽纹按照棘轮连接发生滑动。因此传感器托架很难运动,由此防止了传感器托架的自主转动。传感器托架由此可以在最终固定或安装之前仅通过提高的力耗费就从经调整的角位置中运动出来,这尤其简化了壳体侧的或传感器模块的组装。但这不必是强制性的,也就是说,传感器托架可以在未组装的状态下也在卡锁凸起没有卡入到槽纹中的情况下能相对壳体自由运动地进入到其角位置中。
优选还规定,第一按压区域布置在壳体的其中一个壳体侧处,其中,第一按压区域在壳体的已组装的状态下贴靠在臂上,使得防止了卡入到槽纹中的卡锁凸起沿径向方向相对于槽纹的移位。因此当壳体被组装并且第一按压区域通过组装到达臂时,自动形成了形状锁合的连接。因此不需要附加的安装步骤来通过形状锁合的连接固定角位置。
优选还规定,壳体的两个壳体侧在已组装的状态下通过螺旋或铆接或夹紧连接保持在一起用以确保形状锁合的连接。
传感器优选设置用于,检测电磁辐射。
传感器例如可以构造成图像传感器、雷达传感器或激光雷达传感器。
传感器托架可以设置用于容纳两个相同的传感器。例如可以设置第二图像传感器、雷达传感器或激光雷达传感器,其提供冗余的测量数据(并且由此实现了对第一传感器的数据的检查/验证)或者提供数据用于其它主动控制所述传感器的应用(例如关于“感兴趣的区域”、样本频率等)。
传感器托架可以设置用于容纳两个、三个或四个不同的传感器。例如可以设置第二传感器(例如图像传感器、雷达传感器或激光雷达传感器),其提供冗余的和/或补充性的测量数据(并且由此实现了对第一传感器的数据的检查/验证或者补充第一传感器的数据)或者提供数据给需要这些数据的其它应用,第一传感器无法(或者无法以所需的质量/精度)提供所述数据。
尤其可以设置日光相机、IR相机、距离测量仪。此外,也可以设置两个相机,其中,一个相机提供直接处理的视频信号并且另一个相机提供被记录的视频信号(例如相机1:交通指示牌识别、人员检测、轨迹追踪;相机2:视频信号)。
此外,传感器托架可以设置用于容纳一种发出电磁辐射(雷达波、激光、红外线等)的装置。
传感器模块优选还包括电路,所述电路设置用于接收传感器的测量信号并且在考虑到传输协议的情况下将由测量信号产生的测量数据传输给接收器。
电路例如可以设置用于,将数据分成消息块并且将数据块发送给预定的接收器。此外,电路可以从测量信号提取信息并且将其作为数据转达。传感器模块例如可以设置用于处理和/或发出环境数据。也就是说,传感器模块可以设置用于,从测量信号探测在传感器的环境中的对象/障碍物并且将有关所探测到的对象的数据传输给接收器。
电路例如可以发出数据,所述数据表明了离开行驶轨迹或者在道路上有人。处理可以例如在壳体中的主印制电路板上进行。也存在这样的可能性,即将另外的传感器,例如后视镜中或后方的“卫星”相机连接到布置在传感器托架中的相机上,在电路中处理这些传感器的信号。
传感器优选构造成雷达传感器、红外传感器或图像传感器。
传感器模块可以安装在车辆的内部中(例如风挡玻璃后方、车顶中、仪表盘中)。传感器托架的轴线例如可以沿水平方向取向,因而借助传感器托架的转动可以调整传感器相对水平线的角度或者调整“传感器视向”相对行驶轨迹的倾斜。
但传感器模块也可以安装在车辆的侧窗玻璃后方或者安装在侧镜中。轴线此外可以(基本上)沿竖直的方向取向,以便使视野例如对准机动车的死角中的区域。
角位置优选能在150°到200°的范围内进行调整、特别优选地能180°地调整。
在直至180°的调整角中,例如可以通过图像在软件中的虚拟的转动来显示车辆处的每个角度(360°)。
此外要注意的是,按本发明的传感器模块的(优选的实施方式的)所有的特征和优点也可以是按本发明的方法的(优选的实施方式)的特征和优点,所述方法涉及到按本发明的传感器模块的(可能的)应用。
按照本发明,还规定了用于组装按本发明的传感器模块的方法,至少带有下列步骤:
-提供壳体的壳体侧和传感器托架;
-将传感器托架置放到其中一个壳体侧中;
-使所置放的传感器托架围绕转动轴线扭转用以调整角位置;
-组装和连接两个壳体侧用以构成壳体,其中,至少在组装和连接壳体侧之后在壳体和传感器托架的周侧面区域之间产生力锁合或形状锁合的连接,以便将传感器托架固定在相对于壳体调整了的角位置中。
在此优选规定,为了产生与壳体的形状锁合的连接,将在其中一个壳体侧处的至少一个卡锁凸起卡入到传感器托架的周侧面区域上的槽纹中,其中,第一按压区域在组装壳体侧时或者至少在组装壳体侧之后与至少一个卡锁凸起作用连接,使得防止了卡入到槽纹中的卡锁凸起相对于槽纹的径向的调整用以固定传感器托架的相对壳体调整后的角位置。一旦组装了壳体侧,由此就可以有利地自动形成形状锁合的连接。这一点可以通过螺旋或铆接或夹紧连接进一步得以确保。
在此优选规定,至少一个卡锁凸起在置放传感器托架之后并且在组装和连接两个壳体侧之前
-至少部分卡入到传感器托架的周侧面区域上的槽纹中并且卡锁凸起沿径向方向相对于槽纹的移位是可能的,或者
-没有卡入到在传感器托架的周侧面区域上的槽纹中,
用于调整传感器托架相对于壳体的角位置。
附图说明
接下来在详细的说明书中借助实施例阐释本发明,其中,参考了附图,附图中:
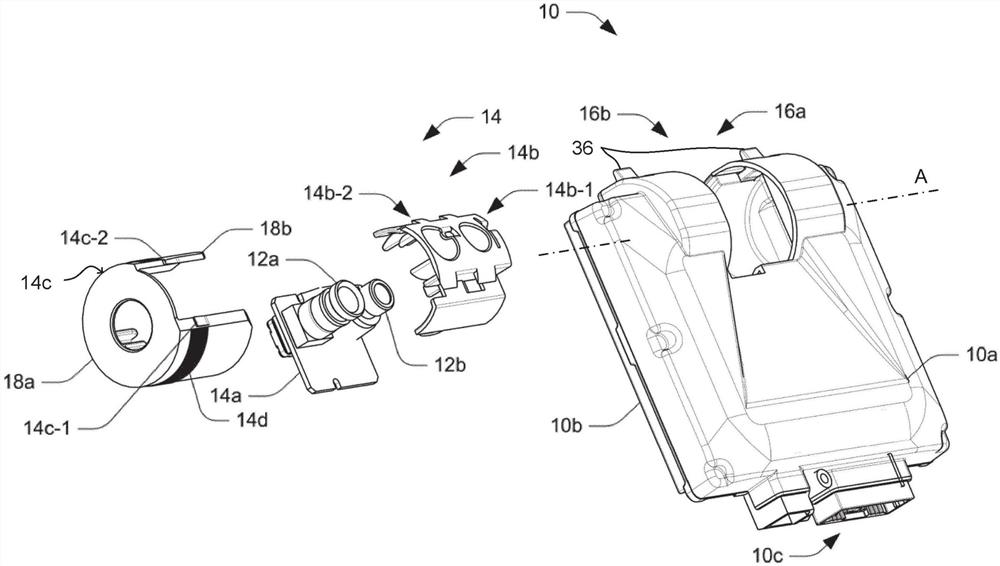
图1示出了按本发明的传感器模块的元件的立体视图;
图2在已组装的状态下部分示出了图1所示的元件的立体视图;
图2a示出了图2中所示的传感器托架的剖视图;
图2b、2c示出了已组装的传感器模块的剖视图;
图3示出了传感器托架相对壳体的转动;
图3a和图3b示出了传感器模块的另外的元件;
图4至图10示出了传感器模块在车辆中的安装;
图11示出了在雷达传感器和布置在传感器模块中的电路之间的连接;
图12示出了在红外传感器和布置在传感器模块中的电路之间的连接;并且
图13示出了环境数据。
在此,在附图中,相同的或功能类似的元件用相同的附图标记标注。但显而易见的是,没有必要在所有的附图中示出所有的元件并且所示出的元件仅考虑用于阐明本发明的方面。
具体实施方式
图1和图2示出了壳体10和配设有两个传感器(特别是配设有两个图像传感器或相机)12a、12b的传感器托架14(在图2中在已组装的状态下)的立体视图。传感器12a、12b单独安装在传感器托架14上,因而传感器托架14也可以仅配设有一个传感器12a(例如相机),即第一种传感器类型的传感器12a(例如相机)和第二种传感器类型的传感器12b(例如雷达传感器1010、红外传感器1040(参看图11和图12)、激光雷达传感器或任意其它的传感器组合)。因为传感器托架14可以装备有针对相应的测量场景所需的传感器12a、12b、1010、1040,所以传感器模块10可以使用在不同的测量场景中。
壳体10形成了空心体10d并且具有两个同轴的柱形的容纳部16a、16b,传感器托架14的柱形的端部18a、18b可以以能围绕轴线A滑动地转动的方式支承在所述容纳部中。壳体10在同轴的柱形的容纳部16a、16b之间具有留空部10e,该留空部从壳体10的上侧10f-1经由端侧10f-2延伸到下侧10f-3并且设置用于,在已安装的状态下露出传感器托架14的包围传感器12a、12b的中央部分14e。
在壳体10和(从径向观察)布置在所述露出的区段上的周侧面区域14d之间,可以在组装传感器模块20时产生力锁合(kraftschlüssig)或形状锁合(formschlüssig)的连接100a、100b(例如通过设置槽纹14g)。由此可以使传感器托架14固定在能相对壳体10调整的角位置200中并且使传感器视野与不同的测量场景(例如近场、远场等)或者不同几何形状(高度、挡风玻璃角等)的车辆类型相匹配,这使得能实现不同的应用(或客户预定)。壳体10例如可以这样设计,使得传感器托架14在拧紧壳体半壳10a、10b时被夹紧。此外可以设置一种装置,其允许了在壳体10组装之后夹紧传感器托架14。
传感器托架14包括基板14a,传感器12a、12b紧固在该基板处。基板14a例如可以具有两个开口,传感器12a、12b延伸穿过所述开口,其中,传感器12a、12b的(处在开口的一侧上的)部分具有止挡并且传感器12a、12b的(处在开口的另一侧上的)剩余的部分具有螺纹,传感器12a、12b的壳体部分拧紧到该螺纹上,传感器12a、12b因此紧固在基板14a处。基板14a可以构造成印制电路板,在其上粘接和拧紧有附加的部件。尤其可以如在图2a中所示那样,将传感器电子器件的构件以“三明治”结构的样式与印制电路板拧紧。此外,在印制电路板上还可以设有用于通向电路500的电缆的插塞连接结构14f(在壳体10中的主电路板上)。
此外,基板14a还可以具有留空部和/或突出部,它们在传感器托架14组装时相对于其它元件导引基板14a。此外,基板14a可以(与图1所示不同地)这样设计,使得两个传感器12a、12b能相对彼此围绕轴线A以如下方式转动,即,将基板14a例如分成两个彼此间滑动地支承的元件。
在进一步的组装中,盖14b(沿径向)上移到基板14a上。盖14b具有两个留空部14b-1、14b-2,在已组装的状态下,传感器(例如相机12a、12b的镜头)延伸穿过所述留空部。配设有盖14b的基板14a然后可以如在图2中所示那样沿轴向移动到柱形的套筒14c中并且借助两个凸起14c-1、14c-2与这个套筒卡锁,所述凸起设置在套筒14c的柱周侧面截段的边缘处并且在已组装状态下嵌接到盖14b的留空部14b-3、14b-4中。盖14b的露出的部分具有柱周侧面形状的轮廓,它将套筒14c的柱周侧面形状的轮廓补充成柱形的传感器托架14(或带有柱形的轮廓300的传感器托架14)。
已经组装好的柱形的传感器托架14然后可以以如下方式安装到壳体10中,即,传感器托架14置放在壳体侧10a、10b中、传感器电子器件联接到布置在壳体10中的电路500上(在主电路板上)、调整传感器12a、12b的角位置200并且将壳体侧10a、10b相互拧紧(或另行相互连接)。电路500(在主电路板上)然后可以借助设置在壳体开口处的接口10c被供以能量和/或接收/发送数据。
传感器12a、12b相对于壳体10的角位置200的调整如下进行:
如在图2b和2c的剖视图中所示那样规定,在传感器托架14的(从径向R观察)布置在在传感器模块20的已安装或组装状态下暴露出的区段上的周侧面区域14d上,布置有槽纹14g。槽纹14g在此优选连续地在两个凸起14c-1、14c-2之间延伸,所述凸起布置在套筒14c的柱周侧面截段的边缘处(参看图1)。在传感器模块20的或壳体10的已组装的状态下,一个或多个卡锁凸起30a、30b可以嵌接或卡入到所述槽纹14g中(参看图2c)。
卡锁凸起30a、30b布置在臂34的第一端部区域32a处,臂沿径向R关于传感器托架14是挠曲的。臂34在此在这种实施变型方案中平行于传感器托架14的柱形的轮廓300地延伸,但在此并不接触或仅用卡锁凸起30a、30b接触传感器托架14。但臂34的使得卡锁凸起30a、30b能卡入到槽纹14g中的其它的走向原则上也是可能的。为了形成径向的挠曲性,臂34例如由塑料制成并且以第二端部区域32b紧固在壳体10的壳体上侧10a处(参看图2b、3a、3b)。
在传感器托架14置放在壳体侧10a、10b的其中一个壳体侧中、例如壳体上侧10a中之后,将传感器托架14以如下方式调整到期望的角位置200中,即,这个传感器托架在已置放的状态下围绕转动轴线A扭转。在此,可能已经出现的是,卡锁凸起30a、30b贴靠在槽纹14g上或者卡入到槽纹中并且臂34在传感器托架14扭转时弹性地屈从到期望的角位置200中,而卡锁凸起30a、30b则通过槽纹14g根据棘轮连接的种类滑动。由此使传感器托架14很难运动,因此防止了传感器托架14自主扭转。因此传感器托架14可以由此在最终固定之前仅通过提高力耗费就能从所调整的角位置200运动出去,这尤其简化了壳体侧10a、10b的组装。但也可以规定,卡锁凸起30a、30b在置放之后还没有贴靠在槽纹14g上或卡入到槽纹中,因而所置放的传感器托架14可以自由地围绕转动轴线A扭转。
为了最终固定所调整的角位置200,紧接着将壳体10的壳体下侧10b套装到壳体上侧10a上。为此,首先将在壳体下侧10b处的两个插入凸起36(参看图2b)插入到在壳体上侧10a处的两个开口37(参看图3b)中。紧接着两个壳体侧10a、10b通过螺钉38(参看图3a、3b)相互拧紧并且由此被安全和持久地保持在一起。
通过壳体侧10a、10b的组装以及螺钉38的引入,将壳体下侧10b处的第一按压区域40a牢固地压向在臂24处的第二按压区域40b,由此使卡锁凸起30a、30b在已卡入的状态下保持在槽纹14g中(参看图2c)。因此形成了形状锁合的连接100b。通过第一按压区域40a同样在已组装和拧紧的状态下防止了卡锁凸起30a、30b从槽纹14g径向抬起。传感器托架14围绕转动轴线A的扭转因此在未拧紧的状态下(在该状态下至少还确保了很难的运动)不再有可能。传感器托架14因此在壳体侧10a、10b组装和拧紧之后自动扣锁在其角位置200中。
由此可以避免运行中调整传感器托架14和传感器12a、12b,因为形状锁合的连接100b即使在振动时或在其它外部影响下也负责保持角位置200。通过安装壳体10后才形成形状锁合的连接100b,可以视安装场景和意愿而定事先调整角位置200,其中,角位置200也可以在可选地拆卸壳体10之后总是一再改变。但优选规定,在运行中总是保持期望的角位置200。
如图3所示,可以通过传感器托架14的转动使传感器模块20与不同的安装场景相匹配。例如可以通过从壳体10的上侧10f-1经由端侧10f-2延伸至下侧10f-3的留空部10e将传感器12a、12b的视野围绕轴线A枢转了180°。为此,图3a在部分剖开的状态下示出了壳体10,其中可以看到主电路板和设置在该主电路板上的用于与传感器12a、12b连接的插装空间或插头520,插塞空间或插头例如可以借助柔性的电缆与传感器托架14的印制电路板的在图3b中所示的插塞连接部14f连接。
如在图4和图5中示出的那样,传感器模块20可以布置在车辆900的风挡玻璃22的上方的区域中(例如载重汽车的车顶中),其中,(视空间需求而定)壳体纵轴线可以既基本上竖直地取向也基本上水平地取向。此外,如在图6和图7中所示的那样,传感器模块20可以布置在车辆900的风挡玻璃22的下方的区域中(例如在载重汽车的手套箱中),其中,(视空间需求而定)壳体纵轴线可以既基本上水平地取向也基本上竖直地取向。
当轴线A基本上沿水平方向H取向时,可以通过传感器托架14相对壳体10的转动(尽可能)与安装位置无关地调整检测区域。如在图8中所示那样,传感器模块20可以用于,通过检测在结构处反射的电磁辐射400探测(沿行驶方向)在车辆900前处在不同的距离范围内的结构。
此外,如在图9和图10中示出的那样,传感器模块20可以布置在车辆900的侧窗玻璃920后方或者侧镜壳体910中并且通过检测电磁辐射400检测(侧向)在车辆900旁的结构。当轴线A基本上沿竖直方向V取向时,在此也可以(尽可能)与传感器模块20的安装位置无关地选择检测区域。
图11和图12示意性示出了在传感器托架14(或传感器12a、12b,它们在图11中构造成雷达传感器1000、1010并且在图12中构造成红外传感器1030、1040并且发出形式为雷达辐射或红外辐射的电磁辐射1020)和电路500之间的接触,借助所述接触可以将测量信号600传输给电路500。在此,柔性的电缆连接件510(例如柔性膜)覆盖调整区域。在组装期间,传感器托架14置入到壳体上侧10a中并且通过电缆/柔性结构与电路500连接。传感器托架14然后根据行驶角进行调整并且壳体下侧10b被合上。壳体10然后可以被拧紧,因此固定了传感器托架14相对壳体10的取向。在运行期间,电路500可以从测量信号600产生测量数据700。测量数据700可以例如是环境数据2000(或从环境数据2000推导出的控制数据),环境数据传输给实施驾驶员辅助功能的接收器800。
如在图13中所示那样,环境数据2000例如可以是车辆900的环境中的车道标记2010和车辆2020的位置、速度、加速度等。
附图标记列表
A 轴线
H 水平线
R 径向
V 竖直线
10 壳体
10a 壳体上侧
10b 壳体下侧
10c 接口(电气)
10d 空心体
10e 开口/留空部
10f-1 侧
10f-2 侧
10f-3 侧
12a 传感器(图像传感器/相机)
12b 传感器(图像传感器/相机)
14 传感器托架
14a 基板(印制电路板)
14b 盖
14b-1 留空部
14b-2 留空部
14c 套筒
14c-1 凸起
14c-2 凸起
14d 周侧面区域
14e 区域(中央部分)
14f 插塞连接结构(用于到主电路板的电缆)
14g 槽纹
16a 容纳部
16b 容纳部
18a 柱形的端部(传感器托架)
18b 柱形的端部(传感器托架)
20 传感器模块
22 风挡玻璃
30a、30b 卡锁凸起
32a 第一端部区域
32b 第二端部区域
34 臂
36 插塞凸起
37 开口
38 螺钉
40a 第一按压区域
40b 第二按压区域
50 连接
100a 力锁合的连接
100b 形状锁合的连接
200 角位置
300 轮廓(柱形)
400 电磁辐射
500 电路
510 电缆连接件
520 插头
600 测量信号
700 测量数据
800 接收器
900 车辆
910 侧镜壳体
920 侧窗玻璃
1000 发射极(雷达辐射)
1010 传感器
1020 电磁辐射
1030 发射极(红外辐射)
1040 传感器
2000 环境数据
2010 车道标记
2020 车辆
- 带有能围绕轴线转动的传感器托架的传感器模块以及用于组装这种传感器模块的方法
- 用于确定传感器模块在车辆内的安装位置的方法和装置及带有这类装置的车辆