一种线驱动仿生金龙鱼
文献发布时间:2023-06-19 11:00:24
技术领域
本发明涉及用于游乐水下机器人领域,特别涉及一种线驱动仿生金龙鱼。
背景技术
申请号为CN201920270530.6,授权公告号为CN210126630U的实用新型公开了一种用于观赏的鱼型机器人,该机器人的鱼型壳体的顶端位置和底端位置分别设置鳍状部件,该鳍状部件可以是一些简单装饰,通过一个鱼型壳体和鳍状部件保持了鱼类外形,鱼型壳体是采用3D打印材料制作,并采用串联的多个摆动舵机作为驱动推进装置,前一个摆动舵机通过活动连接件与紧邻的后一个摆动舵机连接。但是该技术方案存在以下问题:
(1)驱动设备数量多,不易协调且能耗大。
(2)整体均为刚性结构,仿生程度较低。
(3)鳍片仅装饰,不具有转向和平衡的作用。
因此,综合上述问题,需要设计一款用于海洋馆观赏的线驱动仿生金龙鱼,具有高仿生、灵活游动的优点,利用金龙鱼较高观赏价值的外形和优美高贵的游动姿态,具有较高的观赏价值和应用。
发明内容
本发明的目的在于提供一种线驱动仿生金龙鱼,具有较高观赏价值的外形和优美高贵的游动姿态,良好环境共融性,保持较高的机动性和稳定性的优点。
本申请是通过以下技术方案实现的:
一种线驱动仿生金龙鱼,其特征在于,包括金龙鱼本体,所述金龙鱼本体包括依次相连的头部、胸鳍和仿生柔性线驱动尾部。所述头部由第一头盖和第二头盖组成,所述第一头盖和第二头盖通过头部前端螺纹紧固件、头部后端螺纹紧固件和头部靠近躯干的一端处的第一支架固定,所述头部内部放置有防水密封仓,所述防水密封仓内部放置有经过特殊防水处理的电源、微储存器、控制模块和LED彩灯、电流传感器,所述电源对传感器和转动部分进行供电,所述控制模块实现对金龙鱼的驱动和传感器的总控制,所述第一胸鳍通过第一万向节与所述第一头盖连接,所述第二胸鳍通过第二万向节与所述第二头盖连接,所述头部靠近躯干的一端通过转动部分与仿生柔性线驱动尾部靠近头部的一端相连,所述仿生柔性线驱动尾部包括背鳍、臀鳍、尾鳍和躯干,所述背鳍、臀鳍、尾鳍和躯干分别经过多次溶胶、凝胶固化连接。
进一步地,所述头部远离躯干的一端处的竖直切面处延长出一定长度的矩形方槽,所述头部包括第一头盖和第二头盖,所述头部远离躯干的一端处挖有一个螺纹孔和通孔,所述螺纹孔和通孔为同心圆并通过一个螺纹紧固件连接,所述螺纹紧固件称为头部前端螺纹紧固件,所述位于第一头盖的螺丝头部具有一定厚度和重量,所述第一头盖通孔处挖掉一定厚度和大小的凹槽。
进一步地,所述矩形方槽靠近躯干的一端处的竖直切面正中央有四个螺纹孔,所述第一支架上有与其相对应的四个等径螺纹孔,所述四个等径螺纹孔为第一支架通孔,用于将所述头部靠近躯干的一端与所述转动部分固定在一起,所述矩形方槽侧面挖有两个螺纹通孔,并通过螺纹紧固件将第一头盖和第二头盖紧密固定,所述螺纹紧固件称为头部后端螺纹紧固件,所述第一头盖和第二头盖通过头部前端螺纹紧固件、头部后端螺纹紧固件和头部靠近躯干的一端处的第一支架固定,所述头部远离躯干的一端处的竖直切面处有一个较小矩形方槽,称为走线槽。
进一步地,所述头部内部放置有经过特殊防水处理后的电源、微储存器、控制模块和LED彩灯、电流传感器,所述控制模块用于控制金龙鱼的游动姿态以及LED彩灯的闪烁频率,所述电流传感器可以检测金龙鱼游动作业时的电量大小。
进一步地,所述第一胸鳍通过第一万向节与所述第一头盖连接,所述第二胸鳍通过第二万向节与所述第二头盖连接。所述第一万向节是由第一单体和第二单体组成,所述第一单体与第一头盖表面凹槽内的一个圆形凸台配合,所述第一单体与第一头盖通过螺纹紧固件连接,所述螺纹紧固件称为第一胸鳍螺纹紧固件。所述第二万向节是由第三单体和第四单体组成,所述第三单体与第二头盖表面凹槽内的一个凸台配合,所述第三单体与第二头盖通过螺纹紧固件连接,所述螺纹紧固件称为第二胸鳍螺纹紧固件。所述第一胸鳍本体一端与第一胸鳍连接器圆柱形基部相配合,所述第二胸鳍本体一端与第二胸鳍连接器圆柱形基部相配合。
进一步地,所述转动部分将所述头部和所述仿生柔性线驱动尾部两部分连接,所述转动部分从前往后看包括第一支架、竖直设置的转动部分本体、主舵盘、副舵盘、第二支架,其中,所述转动部分本体竖直设置在由所述第一支架开口和第二支架开口围成的区域内,所述仿生柔性线驱动尾部靠近头部的一端挖有一个矩形空腔,所述矩形方槽和所述转动部分被置于所述矩形空腔内,周围均被软体材料包围着,形成了一个圆筒状环,所述圆筒状环是正下方开有一条具有一定角度的缝隙的不封闭环形。所述矩形空腔为第二支架提供足够的空间便于转动部分的转动。
进一步地,所述第二支架与一个长椭圆形的片状结构件通过螺纹紧固件相连接,所述一个长椭圆形的片状结构件称为第一碳片,所述第一碳片是平行于正视基准面竖直放置的,所述第二支架正中央的四个对角线对称的螺纹孔称为第二支架通孔,所述第一碳片截面中央有四个圆孔且与第二支架通孔为等径螺纹孔,在所述第一碳片截面有十六个等距等宽的小圆孔。在背鳍与躯干配合的边界处设置有第二碳片,在臀鳍与躯干配合的边界处设置有第三碳片,在尾鳍与躯干配合的边界处设置有第四碳片,所述第一碳片、第二碳片、第三碳片和第四碳片均被软体材料包裹在金龙鱼躯干内。
进一步地,所述第二碳片截面上有四个等距等宽的小圆孔,从靠近头部一端开始分别与第一碳片上竖直方向从上往下开始的四个小圆孔一一相对应,所述第三碳片截面上有四个等距等宽的小圆孔,从靠近头部一端开始分别与第一碳片上竖直方向从下往上开始的四个小圆孔一一相对应,所述第四碳片与第一碳片平行竖直放置,其截面上有八个等距等宽的小圆孔,从竖直方向上从上往下开始分别与第一碳片上竖直方向从上往下开始的中间八个小圆孔一一相对应。
进一步地,所述仿生柔性线驱动尾部包括与鳍线效应结合的仿生线驱动肌腱,所述仿生线驱动肌腱是由所述一条柔软韧性材料不交叉穿过相邻第一碳片的两个圆孔对折实现的,以此类推,八条柔软韧性材料不交叉穿过第一碳片的相邻两个圆孔对折构成了金龙鱼的十六个仿生线驱动肌腱。所述第一碳片与第二碳片通过四条所述仿生线驱动肌腱相连,所述第一碳片与第三碳片通过四条所述仿生线驱动肌腱相连,所述第一碳片与第四碳片通过八条所述仿生线驱动肌腱相连,所述第二碳片、第三碳片和第四碳片的设置均有利于仿生线驱动肌腱方向的转向,分别伸入到背鳍、臀鳍和尾鳍中。在第一碳片与第二碳片中间、在第一碳片与第三碳片中间、在第一碳片与第四碳片中间,每条仿生线驱动肌腱上均固定一个椭圆形垫圈,所述仿生线驱动肌腱与第二碳片、第三碳片、第四碳片截面的圆孔相交处用溶胶、凝胶固定。
进一步地,所述仿生柔性线驱动躯干和背鳍、臀鳍、尾鳍均采用适度的软体材料多次固化而成,所述背鳍、臀鳍、尾鳍厚度薄且纵截面面积大,韧性和柔软性较好,所述尾鳍与背鳍、臀鳍耦合运动,整理尾流。金龙鱼本体的各处截面均为倒水滴型,上宽下窄,整体为柔顺流线型。
与现有技术相比,本发明具有如下有益效果:
1、本发明线驱动仿生金龙鱼在保持优美外形的前提下,可实现金龙鱼的巡游推进、左右拐弯的动作,低噪低扰动,游动姿态优雅高贵;
2、本发明线驱动仿生金龙鱼仅使用一节驱动机构和采用线驱动的方式可实现上述全部动作,一定程度上减少功耗,还提高了金龙鱼的机动性。
3、本发明线驱动仿生金龙鱼设置的胸鳍、背鳍、臀鳍和尾鳍均为软体材料制作而成,具有转向和整理尾流的作用。
附图说明
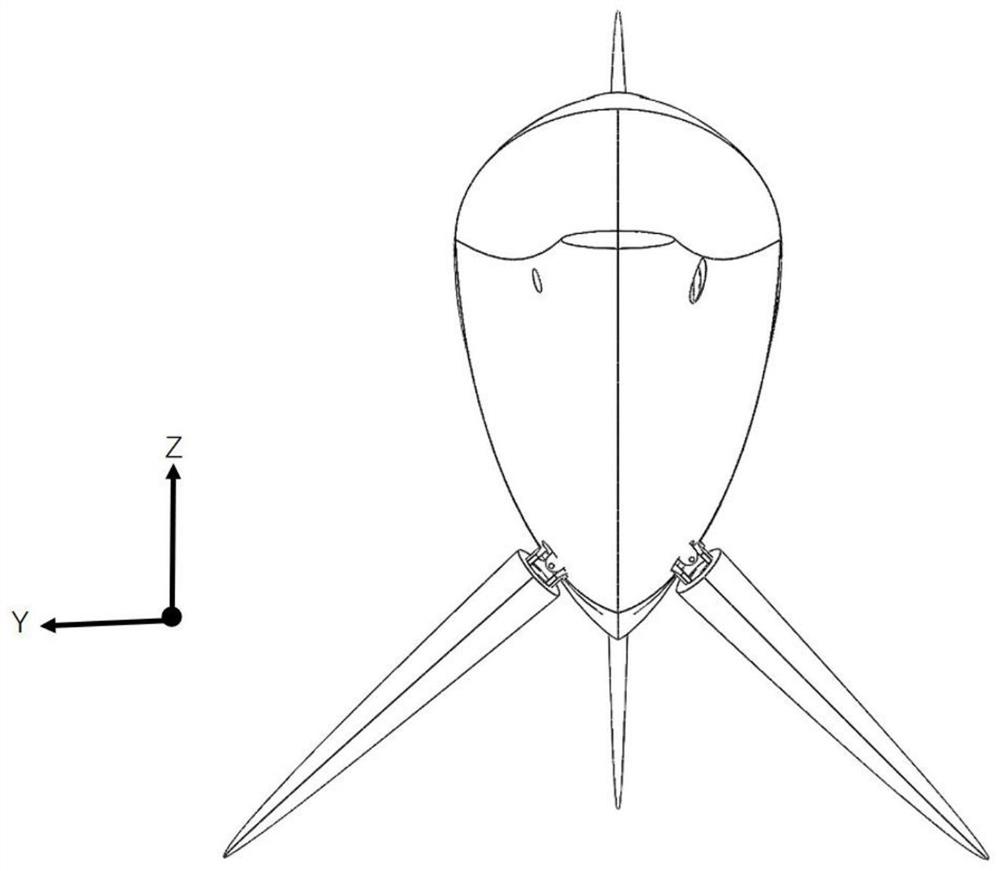
图1为本发明的一种线驱动仿生金龙鱼的正视结构示意图;
图2为本发明的一种线驱动仿生金龙鱼的侧视结构示意图;
图3为本发明的一种线驱动仿生金龙鱼的俯视结构示意图;
图4为本发明的一种线驱动仿生金龙鱼整体的爆炸示意图;
图5为本发明的一种线驱动仿生金龙鱼头部前部的爆炸示意图;
图6为本发明的一种线驱动仿生金龙鱼头部后部的爆炸示意图;
图7为本发明的一种线驱动仿生金龙鱼头部内放置各种模块示意图;
图8为本发明的一种线驱动仿生金龙鱼一对胸鳍的对称结构示意图;
图9为本发明的一种线驱动仿生金龙鱼的转动部分整体示意图;
图10为本发明的一种线驱动仿生金龙鱼的转动部分的爆炸示意图;
图11为本发明的一种线驱动仿生金龙鱼的第一碳片的示意图;
图12为本发明的一种线驱动仿生金龙鱼的柔性线驱动尾部的爆炸示意图;
图13为本发明的一种线驱动仿生金龙鱼的仿生线驱动肌腱与碳片设置的示意图。
图中各符号表示:头部100、胸鳍200、仿生柔性线驱动尾部300、第一头盖101、头部前端螺纹紧固件111、头部后端长螺纹紧固件112、头部后端短螺纹紧固件113、第一胸鳍螺纹紧固件114、第一支架通孔115、矩形方槽116、第二头盖102、走线槽121、第二胸鳍螺纹紧固件122、主控制器模块103、LED彩灯104、电流传感器105、电源106、第一胸鳍201、第一万向节211、第一胸鳍本体212、第一单体211a、万向节连接结构件211b、第二单体211c、第一胸鳍连接器211d、第二胸鳍202、第二万向节221、第二胸鳍本体222、第三单体221a、第四单体221c、第二胸鳍连接器221d、转动部分301、第一支架311、转动部分本体312、副舵盘313、主舵盘314、第二支架315、第一碳片302、第二支架通孔321、背鳍303、臀鳍304、尾鳍305、躯干306、第二碳片361、第三碳片362、第四碳片363、圆筒状硅橡胶环364、仿生线驱动肌腱365。
具体实施方式
下面结合附图对本发明的实施例作详细说明:本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
如图1-图4所示为一种线驱动仿生金龙鱼,包括金龙鱼本体,金龙鱼本体包括依次相连的头部100、胸鳍200和仿生柔性线驱动尾部300,头部100由第一头盖101和第二头盖102组成,第一头盖101和第二头盖102通过头部前端螺纹紧固件111、头部后端长螺纹紧固件112、头部后端短螺纹紧固件113和头部靠近躯干的一端处的第一支架311固定,头部内部放置有防水密封仓,防水密封仓内部放置有经过特殊防水处理的电源106、微储存器、控制模块103和LED彩灯104、电流传感器105,电源104对传感器和转动部分进行供电,控制模块103实现对金龙鱼的驱动和传感器的总控制,第一胸鳍201通过第一万向节211与第一头盖101连接,第二胸鳍202通过第二万向节221与第二头盖102连接,头部100靠近躯干的一端通过转动部分301与仿生柔性线驱动尾部300靠近头部的一端相连,转动部分301实现金龙鱼巡游推进、左右拐弯的动作,仿生柔性线驱动尾部300包括背鳍303、臀鳍304、尾鳍305和躯干306,背鳍303、臀鳍304、尾鳍305和躯干306分别经过多次溶胶、凝胶固化连接,通过增加金龙鱼的截面面积,增大形成涡流面积,从而实现增大金龙鱼在水中的推进力。
如图5-6所示,本实施例中的头部100是采用质地较轻但坚固的塑形材料固化而成,头部100立体示意图是一个不规则圆锥形,头部100远离躯干306的一端处的竖直切面处延长出一定长度的矩形方槽118,矩形方槽118与头部100内部空间相通,这样设计增大了金龙鱼头部的容量,极大地提高了金龙鱼的头部利用率。
本实施例中的头部100包括第一头盖101和第二头盖102,第一头盖101和第二头盖102是沿着竖直中轴面分割,矩形方槽118随着头部100沿着竖直中轴面分割成对称的两部分,头部100远离躯干306的一端处挖有一个螺纹孔和通孔,通孔位于第一头盖101,螺纹孔位于第二头盖102,螺纹孔和通孔为同心圆并通过一个螺纹紧固件连接,螺纹紧固件称为头部前端螺纹紧固件,头部前端螺纹紧固件的规格由螺纹孔半径大小决定,位于第一头盖101的螺丝头部具有一定厚度和重量,第一头盖101通孔处挖掉一定厚度和大小的凹槽使第一头盖101和第二头盖102的重量左右平衡,避免金龙鱼游动过程中头部101的偏斜,实现头部101的配平。
本实施例中的矩形方槽118靠近躯干306的一端处的竖直切面正中央有四个对角线对称的螺纹孔,第一支架上有与其相对应的四个同心圆螺纹孔,四个同心圆螺纹孔为第一支架穿透孔117,用于将头部100靠近躯干306的一端与转动部分301固定在一起,矩形方槽118侧面挖有两个贯穿矩形方槽的等径螺纹孔,并通过螺纹紧固件将第一头盖101和第二头盖102紧密固定,螺纹紧固件称为头部后端螺纹紧固件,分为头部后端长螺纹紧固件112和头部后端短螺纹紧固件113,第一头盖101和第二头盖102通过头部前端螺纹紧固件111、头部后端长螺纹紧固件112、头部后端短螺纹紧固件113和头部靠近躯干的一端处的第一支架311固定,头部远离躯干的一端处的竖直切面处有一个较小矩形方槽,称为走线槽121,用于引出信号线、舵机连接线、开关线。
本实施例中的头部100为一个三维空心壳体,头部100内挖有一个头部的四分之三体积的凹槽,内部放置有经过特殊防水处理后的电源106、微储存器、控制模块103和LED彩灯104、电流传感器105,控制模块103用于控制金龙鱼的游动姿态以及LED彩灯的闪烁频率,LED彩灯104通过调节其闪烁频率与游客互动,增强了金龙鱼的观赏性,给观众带来更好的体验感,电流传感器105可以检测金龙鱼游动作业时的电量大小,便于工作人员可以及时给金龙鱼补充电量。
如图7-8所示,本实施例中的第一胸鳍201通过第一万向节211与第一头盖101连接,第二胸鳍202通过第二万向节221与第二头盖102连接,第一万向节211是由大小尺寸相同的第一单体211a和第二单体211c组成,第一单体211a的基部中通,用于与第一头盖101表面凹槽内的一个圆形凸台配合,第一单体211a的基部和第一头盖101表面凹槽内的一个凸台侧面均挖有一个等径通孔,用于第一单体211a与第一头盖101通过螺纹紧固件连接,螺纹紧固件称为第一胸鳍螺纹紧固件114。
本实施例中的第二万向节221是由大小尺寸相同的第三单体221a和第四单体221c组成,第三单体221a的基部中通,用于与第二头盖102表面凹槽内的一个凸台配合,第三单体221a的基部和第二头盖102表面凹槽内的一个凸台侧面均挖有一个等径通孔,用于第三单体221a与第二头盖102通过螺纹紧固件连接,螺纹紧固件称为第二胸鳍螺纹紧固件122。其中,第一单体和第二单体、第三单体和第四单体分别通过万向节连接结构件211b连接。
本实施例中的第一肉鳍片212一端的切面处挖有一定深度的凹槽,凹槽大小与第一胸鳍连接器211d圆柱形基部大小相配合,第一胸鳍连接器211d的基部侧面挖有一个通孔,第二肉鳍片222一端的切面处挖有一定深度的凹槽,凹槽大小与第二胸鳍连接器221d圆柱形基部大小相配合,第二胸鳍连接器221d的基部侧面挖有一个通孔,第一肉鳍片212和第二肉鳍片222均制为柔性硅橡胶材料,通孔的设计增大了胸鳍连接器与柔性硅橡胶胸鳍的接触面积,更加紧密固定,不易因反复调试而脱落。
如图9-10所示,本实施例中的转动部分301将头部100和仿生柔性线驱动尾部300两部分连接,转动部分301包括第一支架311、和竖直设置的转动部分本体312、主舵盘314、副舵盘313、第二支架315组成,用于带动仿生柔性线驱动尾部300实现巡游推进和左右拐弯的动作,第一支架311开口和所述第二支架315开口呈相对式设置,第一支架311开口比第二支架315开口小,其中,转动部分本体312竖直设置在由第一支架311开口和第二支架315开口围成的区域内,主舵盘314内环设有齿轮,用于与第二支架315传动,副舵盘313内环通孔,可减少转动部分301长时间运行产生的机械损伤。
本实施例中的转动部分转轴所在的轴线位于金龙鱼靠近头部的体长三分之一处,这样的设计可以使得金龙鱼游动姿态更加贴合真实生物金龙鱼。转动部分301采用浮体材料一圈圈包围,使得转动部分301在采用不同材料在不同介质均能达到平衡,实现转动部分301的配平,浮体材料还可用以固定驱动机构,矩形方槽118采用浮体材料一圈圈包围,除了可以增强头部的浮力,避免金龙鱼前端沉底外,还可以最大程度维持金龙鱼良好的流体外形。
本实施例中的仿生柔性线驱动尾部300靠近头部的一端挖有一个矩形空腔,矩形方槽118和转动部分301被置于矩形空腔内,周围均被软体材料包围着,形成了一个圆筒状硅橡胶环364,圆筒状硅橡胶环是正下方开有一条具有一定角度的缝隙不封闭环形,便于转动部分301的拆装和调试。矩形空腔远离头部的边界所在的竖直平面刚好位于第二支架315与转动部分本体313之间的范围,使得转动部分301的转轴所在的竖直中轴面能够灵活转动,而不被软体材料固化住。
本实施例中的第二支架315与一个碳纤维复合材料通过螺纹紧固件相连接,碳纤维复合材料为一个长椭圆形的片状结构件,称为第一碳片302,第一碳片302是平行于正视基准面竖直放置的,第一碳片302的长度小于金龙鱼最大体高,其宽度远小于碳片所在躯干位置的体宽,第二支架317正中央有四个对角线对称的螺纹孔,两条对角线相交处有一个较大的螺纹孔,四个小圆孔为第二支架穿透孔321,第一碳片302截面中央由四个圆孔且与第二支架穿透孔321为同心圆,在第一碳片302截面水平中轴线以上有八个等距等宽的小圆孔,竖直方向上从上往下分别为第一圆孔、第二圆孔、第三圆孔、第四圆孔、第五圆孔、第六圆孔、第七圆孔、第八圆孔,在第一碳片截面水平中轴线以下有八个等距等宽的小圆孔,竖直方向上从上往下分别为第九圆孔、第十圆孔、第十一圆孔、第十二圆孔、第十三圆孔、第十四圆孔、第十五圆孔、第十六圆孔,共十六个圆孔。
本实施例中的背鳍303与躯干306配合的边界处设置一条长椭圆形的片状碳纤维复合材料,称为第二碳片361,第二碳片361的长度与金龙鱼背鳍303长度相适应且小于它,其宽度远小于碳片所在躯干位置的体宽;在臀鳍303与躯干306配合的边界处设置一条长椭圆形的片状碳纤维复合材料,称为第三碳片362,第三碳片362的长度与金龙鱼臀鳍304长度相适应且小于它,其宽度远小于碳片所在躯干位置的体宽;在尾鳍305与躯干306配合的边界处设置一条长椭圆形的片状碳纤维复合材料,称为第四碳片363,第四碳片363的长度与金龙鱼尾鳍长度相适应且小于它,其宽度远小于碳片所在躯干位置的体宽。第一碳片302、第二碳片361、第三碳片362、第四碳片363均被软体材料包裹在金龙鱼体内。
本实施例中的第二碳片361截面上有四个等距等宽的小圆孔,从靠近头部100一端开始分别与第一圆孔、第二圆孔、第三圆孔、第四圆孔一一相对应,第三碳片362截面上有四个等距等宽的小圆孔,从靠近头部100一端开始分别与第十六圆孔、第十五圆孔、第十四圆孔、第十三圆孔一一相对应,第四碳片363与第一碳片302平行竖直放置,其截面上有八个等距等宽的小圆孔,从竖直方向上从上往下开始分别与第五圆孔、第六圆孔、第七圆孔、第八圆孔、第九圆孔、第十圆孔、第十一圆孔、第十二圆孔一一相对应。
本实施例中的仿生柔性线驱动尾部300包括与鳍线效应结合的仿生线驱动肌腱365,仿生线驱动肌腱365可为柔软尼伦绳材料制备,仿生线驱动肌腱365是由一条柔软尼伦绳不交叉穿过相邻两个圆孔对折实现的,以此类推,八条柔软尼伦绳不交叉穿过相邻两个圆孔对折构成了金龙鱼的十六个仿生线驱动肌腱365。第一碳片302与第二碳片361通过四条仿生线驱动肌腱365相连,第一碳片302与第三碳片362通过四条仿生线驱动肌腱365相连,第一碳片302与第四碳片363通过八条仿生线驱动肌腱365相连,第二碳片361、第三碳片362和第四碳片363的设置均有利于仿生线驱动肌腱365方向的转向,分别伸入到背鳍303、臀鳍304和尾鳍305中。
在第一碳片302与第二碳片361中间、在第一碳片362与第三碳片363中间、在第一碳片362与第四碳片363中间,每条仿生线驱动肌腱365都用防水ab溶胶固定一个椭圆形垫圈,可以增大仿生线驱动肌腱365与软体材料的接触面积,防止仿生线驱动肌腱365脱落,仿生线驱动肌腱365与第二碳片361、第三碳片362、第四碳片363截面的圆孔相交处用防水ab溶胶固定,在防脱落的同时便于传导转动部分301产生的摆向力到鳍片尾尖,提高金龙鱼的游动效率。
本实施例中的背鳍303、臀鳍304、尾鳍305和躯干306均采用适度的软体材料多次固化成为一体,背鳍303、臀鳍304、尾鳍305厚度薄而截面面积大,韧性和柔软性较好,背鳍303、臀鳍304与尾鳍305耦合运动,整理尾流,达到良好的减阻效果,提高金龙鱼在水中的推进效率。由正试图可知,金龙鱼本体的各处截面均为倒水滴型,上宽下窄,由俯视图可知,从鼻尖到尾尖开始金龙鱼的体宽缓慢增大,在头部100后端位置达到最大体宽,然后再逐渐变小,可见金龙鱼是一个很好的流体外形,减阻效果良好。躯干306模拟生物金龙鱼的肌肉与脊椎关节,转动部分301模拟生物金龙鱼的巡游推进和左右拐弯的优雅动作,仿生柔性线驱动尾部300模拟生物金龙鱼肌肉与神经网络。
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种线驱动仿生金龙鱼
- 一种混合线驱动连续型仿生机器金枪鱼