一种去中心化的井下定位方法
文献发布时间:2023-06-19 11:02:01
技术领域
本发明涉及井下定位技术领域,特别涉及一种去中心化的井下定位方法。
背景技术
近年来随着4G、5G通讯技术的进步和机械智能化程度的提升,智能化矿井建设在逐渐加速。由于井下矿产资源开采的工序较多,且所需机械较多,因此建设智能化矿井,甚至未来更进一步发展无人化矿井,首先需要解决井下机械设备和人的定位方法。
目前在地面使用的GPS或北斗定位系统,需要依靠卫星信号进行定位,但是由于井下没有实时的卫星信号所以在井下不能正常使用。目前井下主要应用Zigbee技术和RSSI原理来进行井下人员的定位时,但其定位误差范围较大,且只能进行区域定位,不能进行精准的定位。
这几种定位技术完全不能满足智能化矿井、无人化矿井,在井下用来对工人、机械设备定位的要求。因此需要一种去中心化的井下定位方法,不但可以实现在井下对人员、机械设备的精确定位,而且由于采用了去中心化的定位方法,不同的设备和人员所携带的定位电子标签通过传输基站相互校准可以减小定位误差,提高实时定位精度。
因此需要一种去中心化的井下定位方法成为必要。通过对静止物体和移动物体的实时定位,实时传输到地面服务器中,在生产调度中心实时显示在三维数字化矿井模型中,为建立数字化、透明化矿井,以及未来建设无人化矿井奠定基,故此,我们提出一种去中心化的井下定位方法。
发明内容
本发明的主要目的在于提供一种去中心化的井下定位方法,可以有效解决背景技术中的问题。
为实现上述目的,本发明采取的技术方案为:
一种去中心化的井下定位方法,其特征在于:所述去中心化的井下定位方法包括n个电子标签、n个传输基站、n个监控设备、两个服务器、两个储存器和一个生产调度中心;
所述n个电子标签分别安装在n个井下人员或n个井下机械设备上,所述电子标签均为射频识别电子标签,所述电子标签与n个传输基站分别连接,用于将带有所述井下人员或机械设备的标识信息的射频识别电子标签信号发送至所述n个传输基站;
所述n个传输基站均安装在井下并分别用于接收到的每个所述射频识别电子标签信号,获取所述标识信息和所述射频识别电子标签信号的接收时间,并将所述标识信息和所述接收时间分别发送至所述两个服务器,当一个服务器出现故障时,调度中心操作系统会立即实时切换到另一个服务器进行数据处理;;
所述两个服务器与所述n个传输基站、n个监控设备、一个生产调度中心和两个储存器分别相互连接,用于接收每个所述传输基站发送的所述标识信息和所述接收时间,并确定所述电子标签所标识的井下作业人员或机械设备的实际位置,将其实际位置分别发送至所述两个储存器中储存,以便各科室的n个监控设备和生产调度中心对井下人员或机械设备的实时位置进行监控、对人员、机械设备等进行合理调度、发生灾害事故时进行紧急精准救援;
所述两个储存器作为储存装置且安装在地面生产调度中心,可实时储存井下人员或机械设备的位置及轨迹情况,且当一个存储器出现故障时,调度中心存储系统会立即实时切换到另一个存储器进行数据存取;
所述n个监控设备分别与两个服务器和两个储存器连接,所述n个监控设备安装在地面的各个科室中,可显示出井下人员或机械设备的实时位置及轨迹情况,便于科室工作人员实时监控井下人员及设备工作情况;
3.所述生产调度中心分别与两个服务器和两个储存器连接,所述生产调度中心设置在地面上,且有显示屏实时显示井下人员设备位置及轨迹情况,可根据对井下人员或机械设备的实时位置对井下人员或机械设备进行合理调度,所述传输基站包括信号接收天线、陀螺仪、加速度传感器、单片机、信号发射天线和用于供电的电源;
所述信号接收天线用于接收所述电子标签的射频信号;
所述信号传输基站中的陀螺仪作为惯导系统,当移动或者重新安装信号传输基站时,根据信号接收天线所接收的未移动传输基站的位置信息,可自动测量移动或者重新安装的信号传输基站的角速度并将角速度数据信号传给单片机,单片机通过积分角速度可以得处出传输基站相对其他未移动的传输基站的角度;
所述信号传输基站中的加速度传感器用于惯导系统中移动或者重新安装信号传输基站的加速度测量,并将加速度数据信号传给单片机,单片机通过处理加速度可以得出移动或者重新安装的信号传输基站相对其他未移动的传输基站的角度,通过单片机把陀螺仪和加速度传感器测得的移动或者重新安装的信号传输基站相对其他未移动的传输基站的角度数据进行融合可以得到移动或者重新安装的信号传输基站的准确角度数据,重复多次融合陀螺仪和加速度传感器测得的移动或者重新安装的信号传输基站相对其他未移动的传输基站的角度数据可以精确得出,移动或者重新安装的信号传输基站的位置信息,方便电子标签的准确定位;
所述单片机为传输基站控制中心;
所述信号发射天线用于向服务器和n个电子标签传送数据信息。
优选的,所述服务器内安装有距离计算模块,在TOF测距时,本地电子标签向传输基站发送一个数据包,当传输基站收到数据包时,会自动发送一个确认来响应这个数据包,电子标签测量出从发送数据包到接收确认的时间,这段消耗总时间记为TTOT时间;传输基站记录了传输基站从收到数据包到传输基站回应确认消息的这个时间段的时间,记为TTAT,用TTOT总时间减去周转时间TTAT就是双方的数据包在飞行中度过的往返时间,记为TRTT时间,假定在每个方向发生的飞行时间TTOF等于50%的往返时间,如式所示:TTOF=TRTT/2=(TTOT-TTAT)/2当计算出TTOF后,根据D=Tc(T代表TTOF;c代表光速,为3×108ms-1)可以计算出两者距离,结合电子标签相对于传输基站的距离和角度信息,即可定位出电子标签相对于传输基站的位置信息,重复多次融合电子标签相对于多个传输基站的位置信息,即可精准定位出电子标签的位置信息和轨迹信息。
4.所述电子标签用于将带有所述电子标签的井下人员或机械设备的标识信息的射频识别电子标签信号发送至所述多个个传输基站,所述电子标签包括信号传输天线、陀螺仪、加速度传感器和用于供电的电源;
所述电子标签中的陀螺仪作为惯导系统,可自动测量电子标签所在物体的角速度并通过信号传输天线将角速度数据信号传输给附近的信号传输基站中的单片机,单片机通过积分角速度可以得出电子标签所在物体相对不同基站的角度,重复多次融合电子标签所在物体相对不同基站的角度信息,即可准确得出电子标签所在物体相对不同基站的角度信息;
所述电子标签中的加速度传感器用于惯导系统中电子标签所在物体的加速度测量,并将加速度数据信号通过信号传输天线将加速度信号传输给附近的信号传输基站中的单片机,单片机通过处理加速度可以得出电子标签所在物体相对不同基站的角度,通过单片机把陀螺仪和加速度传感器测得的电子标签所在物体相对不同基站和不同电子标签的角度数据进行融合可以得到电子标签所在物体的角度数据,重复多次融合电子标签所在物体相对不同基站的角度信息,即可准确得出电子标签所在物体相对不同基站的角度信息;
优选的,所述电子标签每隔0.5秒至1秒发送一次含有该RFID射频识别编号的无线信号。
优选的,所述n个传输基站、n个电子标签、两个服务器、两个储存器、位于各科室的n个监控设备和一个生产调度中心均通过ZIGBEE网络连接。
优选的,所述电子标签内设有用于数据传输信号传输天线、作为惯导组件的陀螺仪、精准定位的和检测人员或机械运动加速度的加速度传感器,并自带有电源。
优选的,所述存储器内储存有井下施工的采掘工程平面图及每个传输基站的位置图。
优选的,所述电子标签为无源射频识别电子标签或有源射频识别电子标签。
与现有技术相比,本发明具有如下有益效果:
本发明中,不但可以实现在井下对人员、机械设备的精确定位,而且由于采用了去中心化的定位方法,不同的设备和人员所携带的定位电子标签通过传输基站相互校准可以减小定位误差,进一步提高定位的精准度。
附图说明
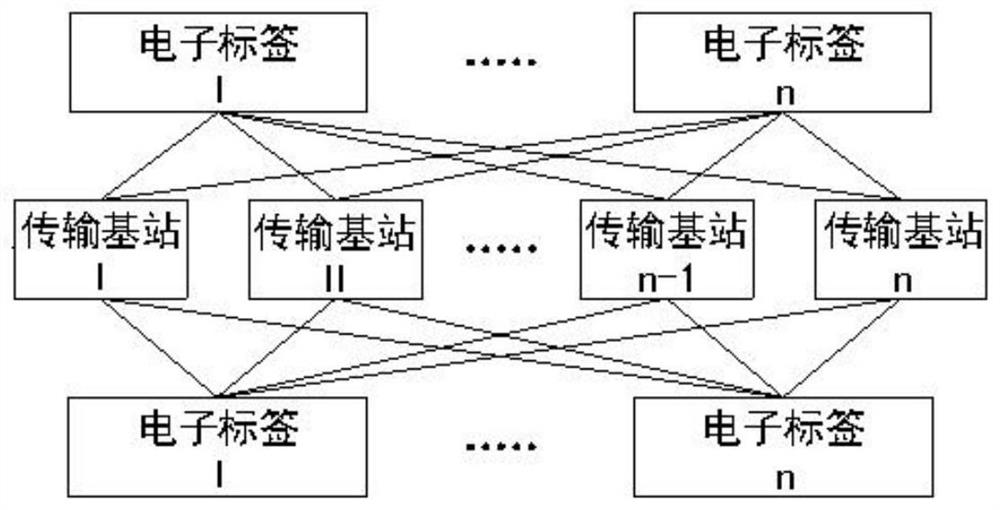
图1是本发明一个实施例的去中心化的矿井定位方法结构示意图;
图2是本发明一个实施例的地面可视化系统结构示意图;
图3是本发明一个实施例的位置记录存储系统示意图;
图4是本发明一个实施例的信号传输基站结构示意图;
图5是本发明一个实施例的电子标签结构示意图。
具体实施方式
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
如图1-5所示,一种去中心化的井下定位方法,其特征在于:所述去中心化的井下定位方法包括n个电子标签、n个传输基站、n个监控设备、两个服务器、两个储存器和一个生产调度中心;
所述n个电子标签分别安装在n个井下人员或n个井下机械设备上,所述电子标签均为射频识别电子标签,所述电子标签与n个传输基站分别连接,用于将带有所述井下人员或机械设备的标识信息的射频识别电子标签信号发送至所述n个传输基站;
所述n个传输基站均安装在井下并分别用于接收到的每个所述射频识别电子标签信号,获取所述标识信息和所述射频识别电子标签信号的接收时间,并将所述标识信息和所述接收时间分别发送至所述两个服务器;
所述两个服务器与所述n个定位基站、n个监控设备、一个生产调度中心和两个储存器分别相互连接,用于接收每个所述传输基站发送的所述位置信息信息、轨迹信息和所述接收时间,并确定所述位置信息所标识的井下人员或机械设备的实际位置和轨迹信息,将其实际位置和轨迹信息分别发送至所述两个储存器中储存,以便地面科室的n个监控设备和生产调度中心对井下人员或机械设备的实时位置进行监控和对人员进行合理调度;
所述两个储存器作为储存装置且安装在地面的生产调度中心,可实时储存井下人员或机械设备的位置和轨迹信息;
所述n个监控设备分别与两个服务器和两个储存器连接,所述n个监控设备均安装在井外且均配置有显示器,可显示出井下人员或机械设备的实时位置和轨迹信息,用于对井下人员或机械设备的位置进行实时跟踪监控;
所述生产调度中心分别与两个服务器和两个储存器连接,所述生产调度中心设置在井外且配置有多个显示器,可根据对井下人员或机械设备的实时位置对井下人员或机械设备进行合理调度。
所述传输基站包括信号接收天线、陀螺仪、加速度传感器、单片机、信号发射天线和用于供电的电源;
所述信号接收天线用于接收所述电子标签的射频信号;
所述信号传输基站中的陀螺仪作为惯导系统,当移动或者重新安装信号传输基站时,根据信号接收天线所接收的未移动传输基站的位置信息,可自动测量移动或者重新安装的信号传输基站的角速度并将角速度数据信号传给单片机,单片机通过积分角速度可以得处出传输基站相对其他未移动的传输基站的角度;
所述信号传输基站中的加速度传感器用于惯导系统中移动或者重新安装信号传输基站的加速度测量,并将加速度数据信号传给单片机,单片机通过处理加速度可以得出移动或者重新安装的信号传输基站相对其他未移动的传输基站的角度,通过单片机把陀螺仪和加速度传感器测得的移动或者重新安装的信号传输基站相对其他未移动的传输基站的角度数据进行融合可以得到移动或者重新安装的信号传输基站的准确角度数据,重复多次融合陀螺仪和加速度传感器测得的移动或者重新安装的信号传输基站相对其他未移动的传输基站的角度数据可以精确得出,移动或者重新安装的信号传输基站的位置信息,方便电子标签的准确定位;
所述单片机为传输基站控制中心;
所述信号发射天线用于向服务器和n个电子标签传送数据信息。
所述服务器内安装有距离计算模块,在TOF测距时,本地电子标签向传输基站发送一个数据包,当传输基站收到数据包时,会自动发送一个确认来响应这个数据包,电子标签测量出从发送数据包到接收确认的时间,这段消耗总时间记为TTOT时间;传输基站记录了传输基站从收到数据包到传输基站回应确认消息的这个时间段的时间,记为TTAT,用TTOT总时间减去周转时间TTAT就是双方的数据包在飞行中度过的往返时间,记为TRTT时间,假定在每个方向发生的飞行时间TTOF等于50%的往返时间,如式所示:TTOF=TRTT/2=(TTOT-TTAT)/2当计算出TTOF后,根据D=Tc(T代表TTOF;c代表光速,为3×108ms-1)可以计算出两者距离,结合电子标签相对于传输基站的距离和角度信息,即可定位出电子标签相对于传输基站的位置信息,重复多次融合电子标签相对于多个传输基站的位置信息,即可精准定位出电子标签的位置信息和轨迹信息。
所述电子标签每隔0.5秒至1秒发送一次含有该RFID射频识别编号的无线信号。
所述n个传输基站、n个电子标签、两个服务器、两个储存器、n个监控设备和一个生产调度中心均通过ZIGBEE网络连接。
所述电子标签内设有用于数据传输信号传输天线、作为惯导组件的陀螺仪、精准定位的和检测人员或机械运动加速度的加速度传感器,并自带有电源。
所述存储器内储存有井下施工的地图及每个传输基站的位置图。
所述电子标签为无源射频识别电子标签或有源射频识别电子标签。
需要说明的是,本发明为一种去中心化的井下定位方法,井下人员或机械设备的位置可通过自身安装有且编号唯一的电子标签通过信号传输天线发射每隔0.5至1秒发射一次标识信息给n个传输基站,n个传输基站接受信息即数据包并将其传送给两个服务器,两个服务器分别接受信息并通过内部的计算模块,在TOF测距时,本地电子标签向传输基站发送一个数据包,当传输基站收到数据包时,会自动发送一个确认来响应这个数据包,电子标签测量出从发送数据包到接收确认的时间,这段消耗总时间记为TTOT时间;传输基站记录了传输基站从收到数据包到传输基站回应确认消息的这个时间段的时间,记为TTAT,用TTOT总时间减去周转时间TTAT就是双方的数据包在飞行中度过的往返时间,记为TRTT时间,假定在每个方向发生的飞行时间TTOF等于50%的往返时间,如式所示:TTOF=TRTT/2=(TTOT-TTAT)/2当计算出TTOF后,根据D=Tc(T代表TTOF;c代表光速,为3×108ms-1)可以计算出两者距离,可通过计算出n个传输基站与每一电子标签的位置距离,并最终确定其位置,可减小定位误差,再根据储存器中存储的井下施工地图及其每个传输基站的位置图,将其准确位置显示在监控设备、生产调度中心和电子标签的显示器上,使得生产调度中心监控端人员及井下人员及时了解其井下位置,并同时将电子标签的移动位置轨迹数据储存在两组储存器中,设有两个服务器和两个储存器,避免其中一个服务器或一个储存器损坏时影响其正常作业。
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种去中心化的井下定位方法
- 一种去中心化存储基于区块链的数据去重与共享审计方法