基于分布式机库的无人机回收方法及系统
文献发布时间:2023-06-19 11:11:32
技术领域
本发明涉及无人机技术领域,尤其涉及一种基于分布式机库的无人机回收方法及系统。
背景技术
目前,国内外开发的多旋翼无人机机库一般为一库一机,即一个停机库收纳和运维一架无人机,无人机起飞和降落回收均在同一个无人机机库完成。
无人机作业时,考虑到返回的航程,无人机可作业距离一般是其最大航程的一半,这就限制了无人机的作业范围。
因此,有必要设计一种无人机回收方法及系统,以解决上述问题。
发明内容
本发明的目的在于提出一种基于分布式机库的无人机回收方法及系统,可实现无人机在完成作业后根据剩余电量就近选择回收入库,大大提高了无人机的作业能力及作业范围。
为达此目的,本发明采用以下技术方案:
一种基于分布式机库的无人机回收方法,预先设置多个机库,各所述机库均能对无人机进行无线信号充电;所述无人机回收方法包括以下步骤:
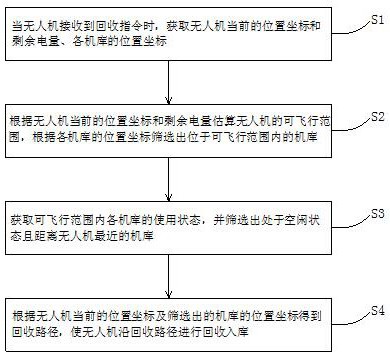
S1:当无人机接收到回收指令时,获取无人机当前的位置坐标和剩余电量、各机库的位置坐标;
S2:根据无人机当前的位置坐标和剩余电量估算无人机的可飞行范围,根据各机库的位置坐标筛选出位于可飞行范围内的机库;
S3:获取所述S2中各机库的使用状态,所述使用状态信息包括空闲或占用,并筛选出处于空闲状态且距离无人机最近的机库;
S4:根据无人机当前的位置坐标及所述S3中筛选出的机库的位置坐标得到回收路径,使无人机沿回收路径进行回收入库。
进一步地,所述S2中,估算无人机的可飞行范围包括以下步骤:
获取无人机的已飞行距离以及已耗电量;
根据已飞行距离及已耗电量计算出飞行单位距离所耗电量;
根据无人机的剩余电量及飞行单位距离所耗电量计算出无人机的可飞行距离,从而得到无人机的可飞行范围。
进一步地,所述S2中,筛选出位于可飞行范围内的机库包括以下步骤:
根据无人机当前的位置坐标及各机库的位置坐标,计算出各机库与无人机之间的距离值;
将各距离值与可飞行距离值进行比较,若距离值小于等于无人机的可飞行距离值,则该距离值对应的机库位于无人机的可飞行范围内。
进一步地,所述S3中,筛选出处于空闲状态且距离无人机最近的机库包括以下步骤:
从位于可飞行范围内的机库中筛选出处于空闲状态的机库;
从处于空闲状态的机库中筛选出距离无人机最近的一个机库。
进一步地,所述S3中,筛选出处于空闲状态且距离无人机最近的机库包括以下步骤:
对位于可飞行范围内的机库,按照距离值由小到大进行排序;
按照顺序依次筛选机库的使用状态,直到筛选出空闲的机库。
一种基于分布式机库的无人机回收系统,用于实现上述的无人机回收方法,所述无人机回收系统包括:
分布设置的多个机库,各所述机库均安装有无线充电装置;
第一采集单元,用于获取各所述机库的位置坐标及无人机在接收到回收指令时的位置坐标和剩余电量;
第一处理模块,根据所述第一采集单元采集的信息估算无人机的可飞行范围,并筛选出位于可飞行范围内的所述机库;
第二采集单元,用于获取所述第一处理模块筛选出的所述机库的使用状态,所述使用状态包括空闲或占用;
第二处理模块,根据所述第二采集单元采集的信息筛选出处于空闲状态且距离无人机最近的所述机库;
传输单元,用于将所述第二处理模块筛选出的所述机库的位置坐标传输至无人机的地面终端系统。
进一步地,所述第一处理模块包括:
第一计算单元,用于根据无人机的剩余电量及飞行单位距离所耗电量计算出可飞行距离值;
第二计算单元,用于计算出各机库与无人机之间的距离值;
第一比较单元,用于判断所述距离值是否小于所述可飞行距离值。
进一步地,所述第二采集单元包括分别安装于各所述机库内的多个感应检测装置。
进一步地,所述第二处理模块包括:
筛选单元,用于从所述第二采集单元采集的信息中筛选出处于空闲状态的机库;及
第二比较单元,用于将所述筛选单元筛选出的各所述机库对应的所述距离值进行比较。
进一步地,所述无人机回收系统还包括存储单元,所述第一采集单元、所述第一处理模块、所述第二采集单元、所述第二处理模块及所述传输单元均与所述存储单元连接。
本发明的有益效果为:本发明提出基于分布式机库的无人机回收方法及系统,通过预先设置的多个机库,使无人机在完成作业后根据剩余电量就近选择机库进行回收,而无需返回至始发的机库,大大提高了无人机的作业能力及作业范围。
附图说明
图1是本发明提供的一种基于分布式机库的无人机回收方法的流程框图;
图2是本发明提供的一种基于分布式机库的无人机回收系统的结构框图。
具体实施方式
下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
如图1所示,一种基于分布式机库的无人机回收方法,预先设置多个机库,各机库均能对无人机进行无线信号充电,并包括以下步骤:
S1:当无人机接收到回收指令时,获取无人机当前的位置坐标和剩余电量、各机库的位置坐标;
S2:根据无人机当前的位置坐标和剩余电量估算无人机的可飞行范围,根据各机库的位置坐标筛选出位于可飞行范围内的机库;
S3:获取S2中各机库的使用状态,使用状态信息包括空闲或占用,并筛选出处于空闲状态且距离无人机最近的机库;
S4:根据无人机当前的位置坐标及S3中筛选出的机库的位置坐标得到回收路径,使无人机沿回收路径进行回收入库。
具体的,该无人机回收方法的S1中,利用GPS定位装置可获取无人机的位置坐标及各机库的位置坐标,从无人机的电源管理模块可获取到剩余电量。
该无人机回收方法的S2中,估算无人机的可飞行范围包括以下步骤:获取无人机的已飞行距离以及已耗电量;根据已飞行距离及已耗电量计算出飞行单位距离所耗电量;根据无人机的剩余电量及飞行单位距离所耗电量计算出无人机的可飞行距离,从而得到无人机的可飞行范围。
进一步地,S2中,筛选出位于可飞行范围内的机库包括以下步骤:根据无人机当前的位置坐标及各机库的位置坐标,计算出各机库与无人机之间的距离值;将各距离值与可飞行距离值进行比较,若距离值小于等于无人机的可飞行距离值,则该距离值对应的机库位于无人机的可飞行范围内。
该无人机回收方法的S3中,筛选出处于空闲状态且距离无人机最近的机库包括以下步骤:从位于可飞行范围内的机库中筛选出处于空闲状态的机库;从处于空闲状态的机库中筛选出距离无人机最近的一个机库。
作为本发明的另一实施例,S3中,筛选出处于空闲状态且距离无人机最近的机库包括以下步骤:对位于可飞行范围内的机库,按照距离值由小到大进行排序;按照顺序依次筛选机库的使用状态,直到筛选出空闲的机库。
该无人机回收方法的S4中,利用无人机的地面终端系统,以无人机当前的位置坐标为起始点、以上述S3中筛选出的机库的位置坐标为终点规划无人机的回收路径,并控制无人机沿回收路线进行回收入库。
如图2所示,本发明还提供一种基于分布式机库的无人机回收系统,用于实现上述的无人机回收方法,该无人机回收系统包括分布设置的多个机库、第一采集单元10、第一处理模块20、第二采集单元30、第二处理模块40、存储单元50及传输单元60。
具体的,该无人机回收系统中,各机库均可实现无人机的起飞及降落。各机库内均安装有无线充电装置,用于对位于机库内的无人机进行无线信号充电。
该无人机回收系统中,第一采集单元10用于获取各机库的位置坐标及无人机在接收到回收指令时的位置坐标和剩余电量。该第一采集单元10包括GPS定位装置及数据采集元件。其中,GPS定位装置用于获取无人机的位置坐标及各机库的位置坐标;数据采集元件用于从无人机的电量监测模块获取剩余电量数据。
该无人机回收系统中,第一处理模块20用于根据第一采集单元10采集的信息估算无人机的可飞行范围,并筛选出位于可飞行范围内的机库。该第一处理模块20包括第一计算单元21、第二计算单元22及第一比较单元23。其中,第一计算单元21用于根据无人机的剩余电量及飞行单位距离所耗电量计算出可飞行距离值;第二计算单元22用于计算出各机库与无人机之间的距离值;第一比较单元23用于判断距离值是否小于可飞行距离值。
该无人机回收系统中,第二采集单元30用于获取第一处理模块20筛选出的机库的使用状态,该使用状态包括空闲或占用。该第二采集单元30包括分别安装于各机库内的多个感应检测装置。优选的,该感应检测装置为红外线传感器。
该无人机回收系统中,第二处理模块40用于根据第二采集单元30采集的信息筛选出处于空闲状态且距离无人机最近的机库。该第二处理模块40包括筛选单元41及第二比较单元42。其中,筛选单元41用于从第二采集单元30采集的信息中筛选出处于空闲状态的机库;第二比较单元42用于将筛选单元41筛选出的各机库对应的距离值进行比较。
该无人机回收系统中,第一采集单元10、第一处理模块20、第二采集单元30、第二处理模块40均与存储单元50连接,用于实现信息及数据的存储。传输单元60与存储单元50连接,用于将第二处理模块40筛选出的机库的位置坐标传输至无人机的地面终端系统,以便于地面终端系统规划回收路线及控制无人机沿回收路线进行回收入库。
本发明的基于分布式机库的无人机回收方法及系统,在无人机完成作业后,可根据无人机的剩余电量就近选择机库进行回收入库,无需返回至始发的机库。即,从A机库出发的无人机可在B机库实现降落回收,在B机库进行自动充电和贮存,大大提高了无人机的作业能力及作业范围。
以上结合具体实施例描述了本发明的技术原理。这些描述只是为了解释本发明的原理,而不能以任何方式解释为对本发明保护范围的限制。基于此处的解释,本领域的技术人员不需要付出创造性的劳动即可联想到本发明的其它具体实施方式,这些方式都将落入本发明的保护范围之内。
- 基于分布式机库的无人机回收方法及系统
- 一种基于无人机机库的智能调度系统及装置