驾驶辅助装置
文献发布时间:2023-06-19 11:14:36
相关申请的交叉引用:本申请基于在2018年10月26日申请的日本申请号2018-202106号,并在此引用其记载内容。
技术领域
本公开涉及基于车周围的物体检测信息来执行驾驶辅助的驾驶辅助装置。
背景技术
专利文献1中记载有检测从邻接车道的后方接近本车的其它车辆并进行通知的系统。在该系统中,为了抑制当本车在交叉点转弯时检测在本车的转弯方向的外侧直行的其它车辆且不必要地执行通知,而在识别为本车正在交叉点转弯时,使本车的转弯方向的外侧的警告区域向接近本车的方向变窄。此外,所谓的警告区域是在检测到侵入到该区域的物体的情况下进行通知的区域。
专利文献1:日本特开2012-243069号公报
根据专利文献1,能够抑制本车在交叉点转弯时的无用通知。另一方面,为了左转或右转而从通常的行驶状态进入交叉点的本车若结束在交叉点的转弯,则离开交叉点,恢复到通常的行驶状态。在离开交叉点恢复到通常的行驶状态时,在保持警告区域变窄的状态下,难以适当地检测接近本车的其它车辆并进行通知,而担心本车的行驶安全性。
发明内容
鉴于上述情况,本公开的目的在于提供一种驾驶辅助装置,该驾驶辅助装置能够在从本车进入交叉点到离开交叉点并恢复到通常的行驶状态期间,适当地检测周围的物体并进行通知。
本公开提供一种驾驶辅助装置,具备:物体检测部,检测本车的左后侧方和右后侧方中的至少任意一方的物体;区域设定部,在上述本车的左后侧方和右后侧方中的至少任意一方设定警告区域;通知部,在通过上述物体检测部检测到物体在上述警告区域内的情况下,执行通知;判定部,判定上述本车在交叉点转弯时的转弯开始和转弯结束;以及区域变更部,在通过上述判定部判定出上述转弯开始的情况下,向接近本车的方向缩小上述警告区域,在通过上述判定部判定出上述转弯结束的情况下,基于上述转弯结束时之后的上述本车的行驶状态来扩大被缩小的上述警告区域。
根据本公开,在通过判定部判定出转弯开始的情况下,区域变更部向接近本车的方向缩小警告区域。因此,能够抑制无用的通知。并且,在通过判定部判定出转弯结束的情况下,区域变更部基于转弯结束时之后的本车的行驶状态来扩大被缩小的警告区域。因此,在判定出本车转弯结束后,在扩大被缩小的警告区域时,也根据本车的行驶状态(例如,行驶速度、行驶距离、行驶时间等)来扩大警告区域,从而能够避免无用的通知并且适时且适当地扩大警告区域。其结果是,能够在从本车进入交叉点到离开交叉点并恢复到通常的行驶状态期间,适当地检测周围的物体,抑制无用的通知,并且确保本车的行驶安全性。
附图说明
通过参照附图进行下述的详细描述,有关本公开的上述目的以及其它目的、特征、优点变得更加明确。
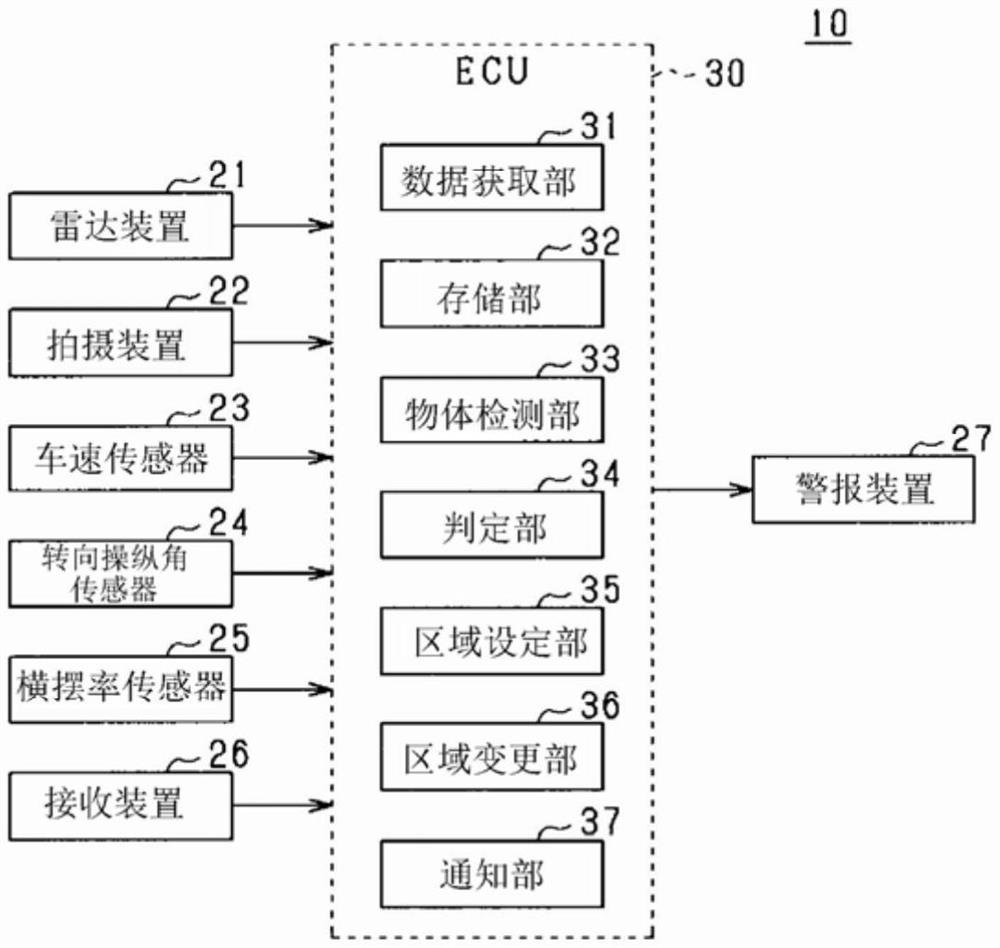
图1是表示实施方式所涉及的驾驶辅助装置的框图。
图2是表示本车与警告区域的位置关系的图。
图3是ECU所执行的驾驶辅助控制的流程图。
图4是对交叉点转弯时的曲线半径的变化进行说明的图。
图5的(a)~(e)是表示从本车进入交叉点开始转弯到结束转弯从交叉点离开的警告区域的变化的图。
图6的(a)和(b)是表示本车在交叉点转弯时的警告区域的变化的图。
图7的(a)和(b)是表示本车在交叉点转弯时的警告区域的变化的图。
具体实施方式
如图1所示,实施方式所涉及的驾驶辅助系统10具备:雷达装置21、拍摄装置22、车速传感器23、转向操纵角传感器24、横摆率传感器25、接收装置26、警报装置27以及ECU30。
雷达装置21例如是将毫米波段的高频信号作为发送波的公知的毫米波雷达。在本车可以仅设置一个雷达装置21,也可以设置多个雷达装置21。雷达装置21例如设置于本车的后端部等,将进入规定的检测角的区域设为能够检测物体的检测范围,检测检测范围内的物体的位置。具体而言,以规定周期发送探测波,并通过多个天线接收反射波。能够根据该探测波的发送时刻和反射波的接收时刻,来计算与物体的距离。另外,根据被物体反射的反射波的因多普勒效应而变化的频率,来计算相对速度。另外,能够根据由多个天线接收到的反射波的相位差,来计算物体的方位。此外,只要能够计算物体的位置以及方位,就能够确定该物体相对于本车的相对位置。
拍摄装置22例如可以是CCD相机、CMOS图像传感器、近红外线相机等单眼相机,也可以是立体相机。在本车可以仅设置一个拍摄装置22,也可以设置多个拍摄装置22。拍摄装置22例如安装于车辆的车宽方向中央的规定高度,从俯瞰视角拍摄朝向车辆前方或后方以规定角度范围扩展的区域。拍摄装置22提取所拍摄的图像中的表示物体的存在的特征点。具体而言,基于所拍摄的图像的亮度信息来提取边缘点,并对提取出的边缘点进行霍夫变换。在霍夫变换中,例如,提取多个边缘点连续地排列的直线上的点、直线彼此正交的点作为特征点。拍摄装置22将依次拍摄的拍摄图像作为传感检测信息向ECU30依次输出。
雷达装置21以及拍摄装置22是获取本车的周边信息的周边监视装置的一个例子。作为周边监视装置,除上述装置外,也可以具备超声波传感器、LIDAR(Light Detectionand Ranging/Laser Imaging Detection and Ranging:光检测和测距仪/激光成像检测和测距仪)等发送探测波的传感器。雷达装置21等的毫米波雷达、声纳、LIDAR等发送探测波的传感器将基于接收信号的扫描结果作为传感检测信息向ECU30依次输出,其中,上述接收信号是在接收到被障碍物反射的反射波的情况下获得的信号。
如图2所示,通过在本车40的后端部在左右各一处设置雷达装置21,能够检测本车40的后方以及后侧方的物体。设置于本车40的后端部左侧的雷达装置21L能够在检测区域70L检测物体。设置于本车40的后端部右侧的雷达装置21R能够在检测区域70R检测物体。
上述的各种周边监视装置不限于检测本车40的后方、后侧方的物体,也可以检测前方、前侧方的物体,作为位置信息来利用。另外,也可以根据所使用的周边监视装置的种类,来变更作为监视对象的对象物体。例如,在使用拍摄装置22的情况下,优选将道路标志、建筑物等静止物体作为对象物体。另外,在使用雷达装置21的情况下,优选将反射功率较大的物体作为对象物体。另外,也可以根据对象物体的种类、位置、移动速度,来选择要使用的周边监视装置。
车速传感器23是检测本车40的行驶速度的传感器,不作限定,例如,能够使用可检测车轮的旋转速度的车轮速度传感器。被用作车速传感器23的车轮速度传感器例如安装于车轮的轮部分,将与车辆的车轮速度相应的车轮速度信号向ECU30输出。
转向操纵角传感器24例如安装于车辆的转向杆,将与伴随驾驶员的操作的方向盘的转向操纵角的变化相应的转向操纵角信号向ECU30输出。
横摆率传感器25可以仅设置一个,也可以设置多个。在仅设置一个的情况下,例如,设置于本车40的中央位置。横摆率传感器25将与本车40的转向操纵量的变化速度相应的横摆率信号向ECU30输出。在设置有多个横摆率传感器25的情况下,也可以使用各个检测值的平均值、中间值等。另外,也可以在计算多个横摆率的检测值的平均值等时,进行加权。
接收装置26是GPS接收装置,是GNSS(Global Navigation Satellite System:全球导航卫星系统)接收装置的一个例子。通过接收装置26,能够接收来自卫星定位系统的定位信号,该卫星定位系统通过人造卫星确定地面的当前位置。
警报装置27是用于通知驾驶员等的装置,例如能够例示设置于本车40的车室内的扬声器、蜂鸣器等在听觉上通知的装置、显示器等在视觉上通知的装置等,但并不限定于此。警报装置27通过基于来自ECU30的控制指令发出警报声等,例如对驾驶员通知有与物体碰撞的危险等。
ECU30具备数据获取部31、存储部32、物体检测部33、判定部34、区域设定部35、区域变更部36以及通知部37。ECU30具备CPU、ROM、RAM、I/O等,通过CPU执行安装于ROM的程序来实现这些各功能。由此,ECU30基于从雷达装置21、拍摄装置22、车速传感器23、转向操纵角传感器24、横摆率传感器25、接收装置26获取的信息,来创建对警报装置27的控制指令,并输出,从而作为执行本车40的驾驶辅助的驾驶辅助装置发挥功能。
数据获取部31获取由雷达装置21、拍摄装置22、各种传感器23~25获取的检测数据和由接收装置26接收到的定位信号。
存储部32存储由数据获取部31获取的各种数据、以及基于各种数据计算出的计算值。存储部32也能够将本车40在交叉点转弯时的本车40的曲线半径的历史存储为转弯曲线历史。此外,所谓的交叉点是指十字路口、丁字路口和其它两条或更多条道路相交时的该两条或更多条道路(在人行道和车道有区别的道路中,为车道)相交的部分。转弯曲线历史例如可以是存储在从本车40实际进入交叉点到离开并恢复到通常的行驶状态期间得到的本车40的曲线半径的数据,也可以在本车40在交叉点行驶时适当地更新或者添加。转弯曲线历史也可以与交叉点的位置、形态(形状、大小等)建立关联地存储。此外,以下,存在将曲线半径简称为半径的情况。
物体检测部33能够基于从雷达装置21、拍摄装置22等周边监视装置获取的检测数据,来检测本车40的左后侧方和右后侧方中的至少任意一方的物体。例如,如图2所示,能够基于与在雷达装置21L、21R的检测区域70L、70R检测出的物体信息相关的数据,来检测本车40的左后侧方、右后侧方的物体。
判定部34判定本车40在交叉点转弯时的转弯开始和转弯结束。优选判定部34构成为基于存储于存储部32的转弯曲线历史和当前的本车40的半径,来判定本车40在交叉点转弯时的转弯开始和转弯结束。判定部34也可以构成为基于当前的本车40的位置信息、周边信息等,来读取与转弯的交叉点相应的转弯曲线历史。判定部34能够基于车速传感器23、转向操纵角传感器24、横摆率传感器25等的检测值,来计算当前的本车40的半径R。
判定部34例如也可以基于由存储部32存储的转弯曲线历史,读取规定的半径作为转弯开始半径Rs或者转弯结束半径Re,通过转弯开始半径Rs或转弯结束半径Re与当前的本车40的半径R的比较,来判定转弯开始和转弯结束。由此,能够迅速地执行适合于本车40的当前的行驶状态的判定。其结果是,能够进行适合于本车40的当前的行驶状态的警告区域的设定或变更。此外,转弯开始半径Rs和转弯结束半径Re可以设定为不同的值(Re>Rs或Re<Rs),也可以设定为相等的值(Rs=Re)。
判定部34例如也可以获取实际的行驶中的本车40的半径R,与所读取的转弯开始半径Rs进行比较,在满足R≤Rs的情况下,判定为本车40在交叉点开始了转弯。进一步,判定部34也可以按每个判定处理周期计数满足R≤Rs的情况,当在规定的周期数中连续地判定为满足R≤Rs的情况下,判定为本车40在交叉点开始了转弯。
另外,判定部34例如也可以获取实际的行驶中的本车40的半径R,与所读取的转弯结束半径Re进行比较,在满足R>Re的情况下,判定为本车40在交叉点的转弯结束了。进一步,判定部34也可以按每个判定处理周期计数满足R>Re的情况,当在规定的周期数中连续地判定为满足R>Re的情况下,判定为本车40在交叉点开始了转弯。
判定部34也可以构成为一并使用存储于存储部32的转弯曲线历史以外的信息,来进行与本车40的转弯的开始、结束相关的判定。例如,也可以将从拍摄装置22获取的本车40的周围的物体信息(例如,周围的车辆、行人、区划线等路面标识、道路标志等)、从接收装置26获取的位置信息、地理信息、交通信息等与转弯半径一并使用,来进行本车40的转弯的开始、结束的判定。
区域设定部35对本车40的左后侧方和右后侧方中的至少任意一方设定警告区域。警告区域被设定为在检测到侵入到该区域的物体的情况下,进行通知的区域。在雷达装置21的检测区域内,警告区域能够设定为任意的形状以及大小,但优选如图2所示的警告区域71L、71R那样,在本车40的左右的后侧方,以车道宽度左右的横向宽度设定成带状。
例如,如图2所示,在雷达装置21L的检测区域70L内,设定从本车40的左后端沿着行驶方向(图2中用Y轴表示的方向)向后方延伸并且沿着横向宽度方向(图2中X轴所示的方向)向左方延伸的带状的警告区域71L。另外,区域设定部35在雷达装置21R的检测区域70R内,设定从本车40的右后端沿着行驶方向向后方延伸并且沿着横向宽度方向向右方延伸的带状的警告区域71R。区域设定部35也可以仅设定本车40的左后侧方的警告区域71L和右后侧方的警告区域71R中的任一方,也可以设定双方。例如,也可以仅在与本车40的行驶车道邻接的邻接车道侧设定警告区域。
区域设定部35也可以使用从拍摄装置22获取的本车40的周围的路面标识、道路标志等信息、从接收装置26获取的本车40的位置信息、地理信息、交通信息等,来进行警告区域的设定。
在通过判定部34判定出转弯开始的情况下,区域变更部36向接近本车40的方向缩小警告区域。通过缩小警告区域,能够抑制其它车辆侵入到由于交叉点的转弯而设定在成为本车道的车道等不适当的位置的警告区域,而执行无用的通知。而且,在本车40开始转弯后通过判定部34判定出转弯结束的情况下,区域变更部36基于转弯结束时之后的本车40的行驶状态来扩大在转弯开始时之后被缩小的警告区域。在扩大被缩小的警告区域时,通过根据本车40的行驶状态来扩大警告区域,能够抑制其它车辆侵入到设定在不适当的位置的警告区域而执行无用的通知,并且适时且适当地扩大警告区域。
优选区域变更部36构成为对设定在与本车40在交叉点转弯的方向相反的后侧方的警告区域,执行大小的变更(缩小或扩大)。具体而言,区域变更部36优选在本车40在交叉点左转的情况下(向左转弯的情况下),变更设定在右后侧方的警告区域,优选在本车40在交叉点右转的情况下(向右转弯的情况下),变更设定在左后侧方的警告区域。
区域变更部36缩小警告区域的方向是接近本车40的方向即可。例如,可以是本车40的行驶方向(图2中用Y轴表示的方向),也可以是本车40的横向宽度方向(图2中用X轴表示的方向)。区域变更部36扩大警告区域的方向是与缩小的方向相反、远离本车40的方向即可。在区域变更部36扩大警告区域时,优选在本车40成为通常的行驶状态的时刻之前,扩大为成为与缩小警告区域之前的警告区域相同的大小、以及与本车40的位置关系。
区域变更部36也可以在通过判定部34判定出转弯开始的时刻,将警告区域缩小到规定的大小,也可以在从本车40开始转弯到结束转弯期间,阶段性地缩小警告区域。
区域变更部36也可以使用从拍摄装置22获取的本车40的周围的路面标识、道路标志等信息、从接收装置26获取的本车40的位置信息、地理信息、交通信息等,来确定警告区域的变更的方向、变更的程度。例如,当在交叉点转弯时,为了抑制检测在本车40的行驶车道行驶的其它车辆并执行通知,也可以基于由拍摄装置22识别出的区划线,来缩小警告区域,以不在本车道内设定范围。
区域变更部36也可以构成为在通过判定部34判定出转弯结束的情况下,根据转弯结束时之后的本车40的行驶距离、行驶时间、行驶速度中的至少任意一个来扩大被缩小的警告区域。此外,本车40的行驶距离、行驶时间、行驶速度例示表示本车40的行驶状态的参数,也可以使用表示本车40的行驶状态的其它参数(例如,能够由加速度传感器检测的本车40的加速度等)。
在转弯结束时之后,本车40行驶的行驶距离越长,本车40的行驶状态越接近通常的行驶状态。另外,在转弯结束时之后,本车40行驶的行驶时间越长,本车40的行驶状态越接近通常的行驶状态。另外,转弯结束时之后的本车40的行驶速度越快,本车40的行驶状态越接近通常的行驶状态。
因此,通过在转弯结束时之后本车40行驶的行驶距离或者行驶时间越长、或者本车40的行驶速度越快,越扩大警告区域,能够避免无用的通知,并且扩大警告区域直到恢复到通常的行驶状态。区域变更部36也可以伴随着本车40的行驶速度、行驶距离、行驶时间的上升,阶段性地(阶梯状地)扩大警告区域,也可以连续地(线状或曲线状地)扩大警告区域。
或者,区域变更部36也可以对表示本车40的行驶状态的参数设定用于扩大警告区域的扩大执行阈值,在行驶速度等超过该扩大执行阈值的情况下,进行警告区域的扩大。例如,也可以对本车40的行驶速度、行驶距离、行驶时间设定用于扩大警告区域的扩大执行阈值(扩大执行速度、扩大执行距离、扩大执行时间),在行驶速度、行驶距离、行驶时间分别超过扩大执行速度、扩大执行距离、扩大执行时间的情况下,进行警告区域的扩大。通过设定扩大执行阈值,即使在作出转弯结束判定的情况下,也能够使警告区域的扩大执行延迟,直到本车40的行驶状态满足规定的条件。扩大执行阈值例如能够基于交叉点的形态、周边信息、地理信息等来设定。
对于扩大执行阈值而言,可以对表示本车40的行驶状态的一个参数设定一个,也可以阶段性地设定多个。例如,可以对本车40的行驶速度设定一个扩大执行速度,在作出转弯结束的判定后,在本车40的行驶速度超过该扩大执行速度的情况下,将警告区域扩大到缩小前的大小。另外,例如,也可以对本车40的行驶速度设定多个不同的速度的扩大执行速度,每当本车40的行驶速度超过被设定为更快的速度的扩大执行阈值时,将警告区域扩大得更大。若更具体地说明,则可以按照速度从慢到快的顺序,设定第一扩大执行速度、第二扩大执行速度、第三扩大执行速度,在本车40的行驶速度超过第一扩大执行速度的情况下,将警告区域扩大规定的大小的量,在本车40的行驶速度超过第二扩大执行速度的情况下,进一步扩大警告区域,在本车40的行驶速度超过第三扩大执行速度的情况下,将警告区域恢复到缩小前的大小。
在通过物体检测部33检测到物体在警告区域内的情况下,通知部37向警报装置27发出指令执行通知。虽然未图示,但也可以与通知一起执行本车40的驾驶控制(例如,避免碰撞控制)。
使用图3的流程图对ECU30所执行的驾驶辅助控制进行说明。图3所示的处理在本车40的驾驶中以规定的时间间隔被重复执行。
首先,在步骤S101中,从雷达装置21、拍摄装置22、车速传感器23、转向操纵角传感器24、横摆率传感器25、接收装置26适当地获取各种传感器类的检测值、定位信息等,并进入步骤S102。
在步骤S102中,从存储于ECU30的转弯曲线历史中读取转弯开始半径Rs。接着,在步骤S103中,从存储于ECU30的转弯曲线历史中读取转弯结束半径Re。然后,进入步骤S104。
在步骤S104中,判定基于转向操纵角传感器24等的检测值得到的本车40的半径R是否为转弯开始半径Rs以下。在R≤Rs的情况下,进入步骤S105,对于转弯开始计数器Cs,向上计数为Cs=Cs+1,之后进入步骤S106。在R>Rs的情况下,进入步骤S110,将计数器Cs重置为Cs=0,之后进入步骤S111。
在步骤S106中,判定计数器Cs是否为规定的计数器阈值Ls以上。在连续的Ls周期中,当在步骤S104中判定为R≤Rs的情况下,步骤S106中的Cs≥Ls的条件成立。在Cs≥Ls的情况下,进入步骤S107,判定为转弯开始,并且进入步骤S108,执行警告区域的缩小。在步骤S108中,例如,在判定为转弯开始的时刻,以1个阶段将警告区域缩小到规定的大小,但并不限定于此。也可以根据从转弯开始时起的经过时间、本车40的行驶状态、本车40的周边的物体信息等,逐渐将警告区域缩小到规定的大小。在Cs<Ls的情况下,进入步骤S109,不执行警告区域的变更。在步骤S108、S109之后,进入步骤S120。
另一方面,在步骤S111中,判定本车40是否正在转弯。在比当前周期靠前的周期中作出转弯开始判定,并且之后未作出转弯结束判定的情况下,判定为本车40正在转弯。在本车40正在转弯的情况下,进入步骤S112。在本车40不是正在转弯的情况下,进入步骤S118,不执行警告区域的变更。
在步骤S112中,判定所检测到的本车40的半径R是否超过转弯结束半径Re。在R>Re的情况下,进入步骤S113,对转弯结束计数器Ce向上计数为Ce=Ce+1,之后进入步骤S114。在R≤Re的情况下,进入步骤S117,将计数器Ce重置为Ce=0,之后进入步骤S118,不执行警告区域的变更。
在步骤S114中,判定计数器Ce是否为规定的计数器阈值Le以上。在连续的Le周期中,在步骤S112中判定为R>Re的情况下,步骤S113中的Ce≥Le的条件成立。在Ce≥Le的情况下,进入步骤S115,判定为转弯结束,进一步进入步骤S116,执行警告区域的扩大。在步骤S116中,获取或计算表示本车40的行驶状态的参数(行驶距离、行驶时间、行驶速度等),根据行驶状态,来执行警告区域的扩大。在判定为转弯结束的时刻,可以以1个阶段将警告区域扩大到规定的大小,也可以根据从转弯结束时起的经过时间、本车40的行驶状态、本车40的周边的物体信息等,逐渐将警告区域扩大到规定的大小。在Ce<Le的情况下,进入步骤S118,不执行警告区域的变更。在步骤S116、S118之后,进入步骤S120。
在步骤S120中,基于在步骤S108、S109、S116、S118中确定的警告区域,判定是否在警告区域内检测到物体。当在警告区域内检测到物体的情况下,进入步骤S121,向警报装置27输出了执行通知的指令之后,结束1个周期的处理。当在警告区域内未检测到物体的情况下,不执行通知,保持原样结束1个周期的处理。
图4是描绘出在本车40在交叉点转弯的情况下,在图3所示的驾驶辅助处理的每个周期中所检测到的本车40的半径R的图。此外,图4例示出将转弯开始半径Rs和转弯结束半径Re设定为相同的值的情况。
若为了在交叉点转弯,而转向操纵本车40,则基于转向操纵角传感器24等计算的本车40的检测半径R变小,在某一周期中,若R≤Rs,则计数器Cs被设定为1。随着在连续的周期中维持R≤Rs的状态,计数器Cs被向上计数,若达到Cs=Ls,则判定为本车40处于转弯开始的状态。在转弯时的处理周期中,检测半径R在大致恒定推移之后变大。检测半径R增大,在某一周期中,若R>Re,则计数器Ce被设定为1。随着在连续的周期中维持R>Re的状态,计数器Ce被向上计数,若达到Ce=Le,则判定为本车40处于转弯结束的状态。
另外,图4中描绘的本车40的半径的变化被存储于ECU30中,从而能够作为转弯曲线历史来利用。如图4所示,在本车40在交叉点转弯时检测的半径R在转弯开始前显著变小,在转弯时成为大致恒定,从转弯结束起显著增大。因此,转弯开始半径Rs优选设定为半径R的降低率变小时的半径R的值。即,优选设定为半径R降低时的拐点或者拐点附近的半径R的值。另外,转弯结束半径Re优选设定为半径的上升率增大的半径的值。即,优选设定为半径R上升时的拐点或者拐点附近的半径R的值。
此外,在图4中,例示出Re=Rs的情况,但并不限定于此。也可以考虑阈值As、Ae的值,设定为Re<Rs,调整为转弯开始判定时的检测半径R和转弯结束判定时的检测半径R一致。
使用图5对通过图3所示的驾驶辅助处理而警告区域变化的情形进行说明。图5例示了本车40进入交叉点(丁字路口)之后,在交叉点向左方转弯并左转,并且结束转弯从交叉点离开的情况,并示出了本车40在交叉点转弯时的警告区域的变化。在图5中,Y轴表示本车40的行驶方向,X轴表示本车40的横向宽度方向。X轴和Y轴正交。
如图5的(a)所示,本车40转弯的交叉点是行驶方向为从图5的左方向右方的2车道的道路50和行驶方向为从图5的下方向上方的2车道的道路60交叉的丁字路口。对于道路50而言,在由区划线53划分的车道51、52(行驶方向相同)中,在车道51上行驶。道路60具有由区划线63划分而成的车道61、62(行驶方向相同)。在本车40的右后侧方设定有在本车40的行驶方向(Y方向)上延伸成带状的警告区域71。警告区域71表示本车40沿车道51行驶的通常行驶状态下的警告区域,Y方向的大小为Yd,X方向的大小为Xd。
接下来,如图5的(b)所示,若本车40从车道51朝向车道61为了左转而开始转弯,则本车40的半径R成为转弯开始半径Rs以下,作出转弯开始判定。其结果是,本车40的警告区域向接近本车40的方向缩小,成为警告区域72。警告区域72的大小在本车40的行驶方向上缩小为Ys,另一方面,在本车40的横向宽度方向上没有缩小,维持Xd。
如图5的(c)所示,在作出本车40的转弯结束判定之前,本车40的警告区域被设定为警告区域72的大小。本车40的用虚线所示的区域75表示转弯开始后仍未缩小本车40的警告区域的情况的警告区域的范围。区域75的范围在作为本车40的行驶车道的车道61中,到达本车40的后方位置,被设定在不适当的位置。因此,如果在车道61中跟随本车40的其它车辆41侵入到区域75内,且警告区域被设定在区域75的范围内,则会检测到其它车辆41并执行通知。根据本车40的被缩小的警告区域72,由于能够避免警告区域的范围到达本车40的后方,因此能够抑制检测其它车辆41而进行无用的通知。
并且,若本车40进行转弯,则本车40的半径R超过转弯结束半径Re,作出转弯结束判定。若作出转弯结束判定,则如图5的(d)所示,作为本车40的警告区域,添加比警告区域72向本车40侧延伸的警告区域73。对于警告区域73的大小,在本车40的行驶方向上为Yr,在本车40的横向宽度方向上为Xd。若作出转弯结束判定,则本车40的警告区域扩大警告区域73的量。
本车40的当前的行驶速度越快,警告区域73的行驶方向的大小Yr扩大得越大,如图5的(e)所示,继续警告区域73的Y方向的扩大,直到Ys+Yr=Yd,最终成为警告区域74。警告区域74的大小、警告区域74和本车40的位置关系与警告区域71的情况相同。转弯结束判定后,本车40大体沿着车道61行驶,因此警告区域73大体沿着车道61扩大,能够避免在车道61中警告区域扩大到本车40的后方的情况。能够抑制在车道61中检测到其它车辆41而进行无用的通知的情况,并且适时且适当地扩大警告区域。此外,也可以从转弯结束判定时起的行驶距离或者行驶时间越长,大小Yr扩大得越大。
在图5中,例示出沿着本车40的行驶方向缩小警告区域,然后扩大恢复到原来的大小的情况来进行说明,但缩小和扩大的方向并不限定于该方向。例如,也可以如图6的(a)所示的警告区域76那样,在作出了转弯开始判定的情况下,将本车40的横向宽度方向的大小缩小为Xs,在作出了转弯结束判定的情况下,如图6的(b)所示的警告区域77那样,在横向宽度方向上扩大Xr的量。
如图6的(a)所示,警告区域76在车道61中到达本车40的后方位置,但向接近本车40的方向缩小,因此能够抑制检测到其它车辆41而进行无用的通知。另外,在车道62中在本车40的横向宽度方向上缩小警告区域76,因此也能够抑制在本车40的转弯时检测到超过本车40而在车道62上行驶的其它车辆42并进行通知的情况。
在图6的(b)中,本车40的当前的行驶速度越快,大小Xr扩大得越大,继续警告区域77的Y方向的扩大,直到Xs+Xr=Xd。本车40的行驶速度越快,将大小Xr扩大得越大,因此能够抑制在车道61、车道62中检测到其它车辆41、其它车辆42而进行无用的通知的情况,并且适时且适当地扩大警告区域。此外,对于大小Xr,也与图5中的大小Yr相同,可以从转弯结束判定时起的行驶距离或者行驶时间越长扩大得越大。
另外,也可以如图7的(a)所示的警告区域78那样,在作出转弯开始判定的情况下,将本车40的行驶方向的大小缩小为Ys,并且将横向宽度方向的大小缩小为Xs。在该情况下,也可以在作出了转弯结束判定之后,如图7的(b)所示的警告区域79那样,在行驶方向上扩大Yr的量,在横向宽度方向上扩大Xr的量。如图7的(a)所示,警告区域78能够避免在车道61中警告区域的范围到达本车40的后方的情况,并且在车道62中在本车40的横向宽度方向上被缩小。因此,与在图5、6中说明的情况相同,能够抑制检测到其它车辆41、其它车辆42而进行无用的通知。另外,如图7的(b)所示,本车40的行驶速度越快,警告区域79的大小Yr、Xr扩大得越大,因此能够抑制在车道61、车道62中检测到其它车辆41、其它车辆42而进行无用的通知,并且适时且适当地扩大警告区域。
根据上述的实施方式,能够得到以下的作用效果。
ECU30具备:物体检测部33、判定部34、区域设定部35、区域变更部36以及通知部37。物体检测部33检测本车40的左后侧方和右后侧方中的至少任意一方的物体。区域设定部35在本车40的左后侧方和右后侧方中的至少任意一方设定警告区域71~79。在通过物体检测部33检测到物体在警告区域71~79内的情况下,通知部37执行通知。判定部34判定本车40在交叉点转弯时的转弯开始和转弯结束。在通过判定部34判定出转弯开始的情况下,区域变更部36向接近本车40的方向缩小警告区域71,因此能够避免警告区域到达不适当的范围的状态,并能够抑制对不需要通知的其它车辆41、42等执行通知。进一步,在判定出转弯开始之后,在通过判定部34判定出转弯结束的情况下,区域变更部36根据转弯结束时之后的本车40的行驶状态(例如,行驶速度、从转弯结束时起的行驶距离或者行驶时间)来扩大被缩小的警告区域72等。因此,在判定出本车40的转弯结束后,在扩大被缩小的警告区域时,也根据本车40的行驶状态来扩大警告区域,从而能够避免无用的通知并且适时且适当地扩大警告区域。根据由ECU30执行的驾驶辅助处理,在从本车40进入交叉点到离开交叉点并恢复到通常的行驶状态期间,能够适当地检测周围的物体,抑制无用的通知,并且确保本车40的行驶安全性。
此外,区域变更部36向接近本车40的方向变更警告区域即可。例如,区域变更部36也可以构成为在通过判定部34判定出转弯开始的情况下,沿着本车40的行驶方向缩小警告区域71,在通过判定部34判定出转弯结束的情况下,沿着本车40的行驶方向扩大被缩小的警告区域72。另外,例如,区域变更部36也可以在通过判定部34判定出转弯开始的情况下,沿着本车40的横向宽度方向缩小警告区域71,在通过判定部34判定出转弯结束的情况下,沿着本车40的横向宽度方向扩大被缩小的警告区域。进一步,例如,也可以在行驶方向和横向宽度方向双方,进行警告区域的缩小或扩大。能够适当地设定缩小或扩大警告区域的方向,以能够抑制对在车道61中跟随本车40的其它车辆41、在本车40转弯时超过本车40并在车道62上行驶的其它车辆42进行无用地检测并通知的情况。
区域变更部36也可以构成为在通过判定部34判定出转弯结束的情况下,根据转弯结束时之后的本车40的行驶距离、行驶时间、行驶速度中的至少任一个来扩大被缩小的警告区域。在转弯结束时之后,本车40行驶的行驶距离或者行驶时间越长、或者本车40的行驶速度越快,越扩大警告区域,从而能够避免无用的通知,并且将警告区域扩大到恢复到通常的行驶状态。
此外,优选区域变更部36构成为在通过判定部34判定出转弯结束的情况下,在判定转弯开始前的警告区域71的大小的范围内扩大被缩小的警告区域72等。此外,也可以根据转弯结束判定时的本车40的行驶状态,将被缩小的警告区域72等在转弯结束判定时立即扩大到原来的警告区域71的大小。
ECU30还具备存储部32,该存储部存储转弯曲线历史,上述转弯曲线历史是本车40在交叉点转弯时的本车40的曲线半径的历史。而且,判定部34基于转弯曲线历史,来判定本车40在交叉点转弯时的转弯开始和转弯结束。更具体而言,通过对基于本车40的转弯曲线历史设定的转弯开始半径Rs或转弯结束半径Re与当前的本车40的半径的检测值R的比较,来判定转弯开始和转弯结束。因此,能够迅速地执行适合于本车40的当前的行驶状态的判定。其结果是,能够进行适合于本车40的当前的行驶状态的警告区域的设定或变更。
本公开以实施例为基准进行了描述,但应理解为本公开并不限定于该实施例、构造。本公开也包含各种变形例、等同范围内的变形。其中,各种组合、方式,进一步仅包含它们中一个要素、一个以上、或一个以下的其它组合、方式也纳入到本公开的范畴、思想范围。
- ECO驾驶辅助装置、ECO驾驶辅助信息生成装置、ECO驾驶辅助信息计算装置、ECO驾驶状态显示装置、ECO驾驶辅助系统和ECO驾驶辅助信息计算方法
- 驾驶辅助方法以及利用该驾驶辅助方法的驾驶辅助装置、驾驶辅助系统、自动驾驶控制装置、车辆、程序