一种高安全性的爬墙机器人
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及机器人技术领域,尤其涉及一种高安全性的爬墙机器人。
背景技术
随着现代城市的发展,高层建筑越来越多,高层建筑的灾害也频繁发生,但是由于建筑物较高,没有太多的支撑措施,对救援人员有较大的安全威胁;同时,对于许多山崖峭壁的救援勘测工作对救援人员也存在较大安全威胁,从而设计出爬墙机器人。
经检索,中国专利公开号为CN204527386U的专利,公开了一种履带式多吸盘爬墙机器人,包括爬墙车体和设置在爬墙车体上的机器人执行模块,所述爬墙车体包含车身主体、吸盘组件、滚轮、电机、履带、真空泵、电池和控制箱,四个滚轮转动设置在车身主体两侧并且每个滚轮均与一个电机连接由电机驱动,所述履带设置在车身主体一侧的两个滚轮上由滚轮驱动,吸盘组件水平设置在车身主体下侧并且与真空泵连接,所述电池与控制箱固定在车身主体内侧,电池、电机和真空泵均与控制箱连接。
上述专利存在以下不足:其为履带式爬墙机器人,而机器人在实际使用时,需要从平行的地面爬行至垂直的墙面,而上述专利爬行时,垂直上升力仅依靠履带和墙壁的摩擦力,使得从地面爬至墙面时,较为费力。
发明内容
本发明的目的是为了解决现有技术中存在的缺点,而提出的一种高安全性的爬墙机器人。
为了实现上述目的,本发明采用了如下技术方案:
一种高安全性的爬墙机器人,包括机体,所述机体上设置行走机构,机体的顶部外壁通过螺栓固定有支撑板,支撑板的顶部分别设置有吸附机构和辅助爬墙机构,所述辅助爬墙机构包括两组辅助爬墙组件和一组自适应调节组件,所述辅助爬墙组件包括两个橡胶滚轮,两个所述橡胶滚轮的相对一侧外壁转动连接有同一个辅助臂,辅助臂的另一侧转动连接于自适应调节组件,所述辅助臂的内壁开设有滑槽,滑槽的内壁活动连接有缓冲杆,缓冲杆的两侧外壁均固定安装有滑杆二,滑杆二滑动连接于支撑板的内壁上,且滑杆二的外壁套设有弹簧二,弹簧二的两端均焊接固定。
优选地:所述自适应调节组件包括调节滑块和弹簧一,所述调节滑块与两个辅助臂均转动连接,且所述调节滑块通过滑杆一滑动连接有固定架,固定架通过螺栓固定于支撑板的顶部外壁上,两个所述弹簧一分别套设于滑杆一的外壁上。
进一步地:所述行走机构包括四个滚轮和两个履带,四个所述滚轮均通过传动轴转动连接于机体的侧壁上,所述传动轴的外壁通过联轴器连接有驱动电机,驱动电机的壳体通过螺栓固定于机体的内侧壁上。
在前述方案的基础上:位于同一侧的两个所述滚轮均通过履带建立传动连接,所述履带的外侧壁焊接有均匀的防滑凸起。
在前述方案中更佳的方案是:所述吸附机构包括吸盘和气泵,所述气泵通过螺栓固定于支撑板的顶部外壁上,所述吸盘通过滑杆三滑动连接于支撑板的底部,吸盘与气泵通过管路连接,所述支撑板的顶部外壁通过螺栓固定有控制主板,所述驱动电机、电动伸缩杆和气泵均与控制主板电性连接,气泵的出气口与矩形管通过管路连接。
作为本发明进一步的方案:所述吸盘与支撑板的相对一侧外壁通过螺栓固定有同一个电动伸缩杆。
同时,所述支撑板的顶部四周外壁通过螺栓固定有矩形管,矩形管的内壁开设有排气孔。
作为本发明的一种优选的:所述排气孔的开口方向垂直于支撑板。
同时,所述吸盘的内壁通过四个滑台活动连接于过滤网。
作为本发明的一种更优的方案:所述滑台的内壁活动嵌接有滚珠,滑台与吸盘的相对一侧外壁设置有弹簧三。
本发明的有益效果为:
1.该高安全性的爬墙机器人,当从地面到爬墙时,橡胶滚轮先接触墙面,而橡胶滚轮的高度大于大于行走机构,从而使得装置向墙面移动时,橡胶滚轮对整个装置施加一个斜向上的力,其垂直方向的分力为装置的前端上升提供动力,从而使得装置更容易爬上墙面。
2.该高安全性的爬墙机器人,通过设置有滑杆二和弹簧二,当装置以一定的速度爬墙时,冲击力较大,而通过弹簧二的设置,橡胶滚轮受到冲击力,会使得辅助臂旋转,从而通过滑槽带动滑杆二向上,通过弹簧二进行缓冲,从而对冲击力吸收,达到保护装置的作用。
3.该高安全性的爬墙机器人,通过设置有自适应调节组件,当橡胶滚轮收到撞击时,其水平方向的分力会使得整个橡胶滚轮向后运动,使得调节滑块向后压缩弹簧一,而此时,由于辅助臂的缓冲通过杠杆原理实现,向后运动时,整个杠杆结构的受力臂减小,从而使得缓冲力度较大,从而使得本装置可根据撞击的速度,自适应调节缓冲的软硬效果。
4.该高安全性的爬墙机器人,通过设置有电动伸缩杆,由于依靠吸附力爬墙,吸附力的大小与装置的移动阻力相关,而吸附力的大小又可通过吸盘与墙面之间的间隙决定,通过电动伸缩杆的伸缩,即可对吸盘与墙面的间距进行调节,从而调节吸附力大小,可防止吸附力过大而造成的装置移动负荷较大,并且,本装置通过设置有矩形管,排气孔内开设排气孔,且排气孔的开口与支撑板垂直,即与装置移动面垂直,当气泵通过吸盘吸气形成负压吸附时,其吸入的气体通过矩形管内的排气孔排出,而根据动量守恒,当排气孔排气时,又会对装置施加一个垂直且面向墙面的反作用力,从而提高了吸附爬墙效果,增加安全性能。
5.该高安全性的爬墙机器人,通过设置有过滤网,其能对进入吸盘内的空气进行过滤,从而避免因堵塞造成的安全隐患,并且,通过滚珠与弹簧三的设置,其能保证吸盘的距离无论如何调节,过滤网均能可靠的对吸盘与墙面之间的间隙进行过滤,进一步提高安全性。
附图说明
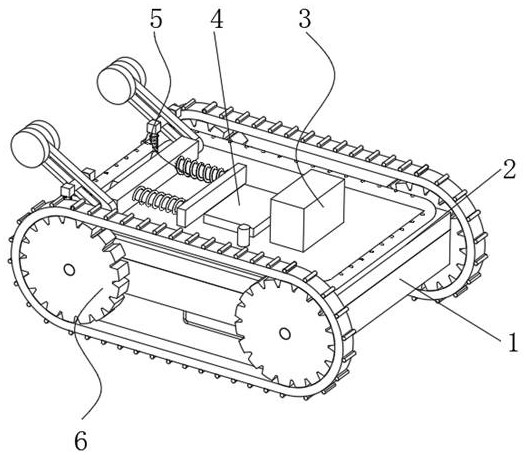
图1为本发明提出的一种高安全性的爬墙机器人的整体结构示意图;
图2为本发明提出的一种高安全性的爬墙机器人的行走机构结构示意图;
图3为本发明提出的一种高安全性的爬墙机器人的辅助爬墙机构结构示意图;
图4为本发明提出的一种高安全性的爬墙机器人的吸附机构结构示意图;
图5为本发明提出的一种高安全性的爬墙机器人的支撑板结构示意图;
图6为本发明提出的一种高安全性的爬墙机器人的吸盘结构示意图;
图7为本发明提出的一种高安全性的爬墙机器人的吸盘剖视结构示意图。
图中:1-机体、2-支撑板、3-吸附机构、4-控制主板、5-辅助爬墙机构、6-行走机构、7-传动轴、8-滚轮、9-履带、10-防滑凸起、11-驱动电机、12-橡胶滚轮、13-辅助臂、14-调节滑块、15-滑杆一、16-弹簧一、17-固定架、18-滑杆二、19-弹簧二、20-缓冲杆、21-滑槽、22-滑杆三、23-电动伸缩杆、24-吸盘、25-气泵、26-矩形管、27-排气孔、28-滑台、29-滚珠、30-过滤网、31-弹簧三。
具体实施方式
下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
下面详细描述本专利的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本专利,而不能理解为对本专利的限制。
在本专利的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本专利和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本专利的限制。
在本专利的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“设置”应做广义理解,例如,可以是固定相连、设置,也可以是可拆卸连接、设置,或一体地连接、设置。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本专利中的具体含义。
一种高安全性的爬墙机器人,如图1、3所示,包括机体1,所述机体1上设置行走机构6,机体1的顶部外壁通过螺栓固定有支撑板2,支撑板2的顶部分别设置有吸附机构3和辅助爬墙机构5,所述辅助爬墙机构5包括两组辅助爬墙组件和一组自适应调节组件,所述辅助爬墙组件包括两个橡胶滚轮12,两个所述橡胶滚轮12的相对一侧外壁转动连接有同一个辅助臂13,辅助臂13的另一侧转动连接于自适应调节组件,所述辅助臂13的内壁开设有滑槽21,滑槽21的内壁活动连接有缓冲杆20,缓冲杆20的两侧外壁均固定安装有滑杆二18,滑杆二18滑动连接于支撑板2的内壁上,且滑杆二18的外壁套设有弹簧二19,弹簧二19的两端均焊接固定,所述自适应调节组件包括调节滑块14和弹簧一16,所述调节滑块14与两个辅助臂13均转动连接,且所述调节滑块14通过滑杆一15滑动连接有固定架17,固定架17通过螺栓固定于支撑板2的顶部外壁上,两个所述弹簧一16分别套设于滑杆一15的外壁上,本装置在使用时,当从地面到爬墙时,橡胶滚轮12先接触墙面,而橡胶滚轮12的高度大于大于行走机构6,从而使得装置向墙面移动时,橡胶滚轮12对整个装置施加一个斜向上的力,其垂直方向的分力为装置的前端上升提供动力,从而使得装置更容易爬上墙面,并且,本装置通过设置有滑杆二18和弹簧二19,当装置以一定的速度爬墙时,冲击力较大,而通过弹簧二19的设置,橡胶滚轮12受到冲击力,会使得辅助臂13旋转,从而通过滑槽21带动滑杆二18向上,通过弹簧二19进行缓冲,从而对冲击力吸收,达到保护装置的作用,另外,本装置通过设置有自适应调节组件,当橡胶滚轮12收到撞击时,其水平方向的分力会使得整个橡胶滚轮12向后运动,使得调节滑块14向后压缩弹簧一16,而此时,由于辅助臂13的缓冲通过杠杆原理实现,向后运动时,整个杠杆结构的受力臂减小,从而使得缓冲力度较大,从而使得本装置可根据撞击的速度,自适应调节缓冲的软硬效果。
为了解决行走问题;如图1、2所示,所述行走机构6包括四个滚轮8和两个履带9,四个所述滚轮8均通过传动轴7转动连接于机体1的侧壁上,位于同一侧的两个所述滚轮8均通过履带9建立传动连接,所述履带9的外侧壁焊接有均匀的防滑凸起10,所述传动轴7的外壁通过联轴器连接有驱动电机11,驱动电机11的壳体通过螺栓固定于机体1的内侧壁上;当驱动电机11启动时,其能通过传动轴7带动滚轮8转动,从而通过履带9的转动实现装置的移动。
为了解决爬墙吸附问题;如图1、4所示,所述吸附机构3包括吸盘24和气泵25,所述气泵25通过螺栓固定于支撑板2的顶部外壁上,所述吸盘24通过滑杆三22滑动连接于支撑板2的底部,所述吸盘24与支撑板2的相对一侧外壁通过螺栓固定有同一个电动伸缩杆23,吸盘24与气泵25通过管路连接,所述支撑板2的顶部外壁通过螺栓固定有控制主板4,所述驱动电机11、电动伸缩杆23和气泵25均与控制主板4电性连接,所述支撑板2的顶部四周外壁通过螺栓固定有矩形管26,矩形管26的内壁开设有排气孔27,排气孔27的开口方向垂直于支撑板2,气泵25的出气口与矩形管26通过管路连接;当装置与墙面几乎平行时,启动气泵25,其能通过吸盘24将装置与墙面之间的气体抽出,从而通过气压作用使得装置吸附于墙面上,完成爬墙工作,并且,本装置通过设置有电动伸缩杆23,由于依靠吸附力爬墙,吸附力的大小与装置的移动阻力相关,而吸附力的大小又可通过吸盘24与墙面之间的间隙决定,通过电动伸缩杆23的伸缩,即可对吸盘24与墙面的间距进行调节,从而调节吸附力大小,可防止吸附力过大而造成的装置移动负荷较大,并且,本装置通过设置有矩形管26,排气孔27内开设排气孔27,且排气孔27的开口与支撑板2垂直,即与装置移动面垂直,当气泵25通过吸盘24吸气形成负压吸附时,其吸入的气体通过矩形管26内的排气孔27排出,而根据动量守恒,当排气孔27排气时,又会对装置施加一个垂直且面向墙面的反作用力,从而提高了吸附爬墙效果,增加安全性能。
为了解决过滤问题;如图6、7所示,所述吸盘24的内壁通过四个滑台28活动连接于过滤网30,滑台28的内壁活动嵌接有滚珠29,滑台28与吸盘24的相对一侧外壁设置有弹簧三31,由于气体进入吸盘24内时,杂质会随之进入,可能会造成堵塞,引起吸附力波动的情况,并且通过设置有过滤网30,其能对进入吸盘24内的空气进行过滤,从而避免因堵塞造成的安全隐患,并且,通过滚珠29与弹簧三31的设置,其能保证吸盘24的距离无论如何调节,过滤网30均能可靠的对吸盘24与墙面之间的间隙进行过滤,进一步提高安全性。
本实施例在使用时,当驱动电机11启动时,其能通过传动轴7带动滚轮8转动,从而通过履带9的转动实现装置的移动,橡胶滚轮12先接触墙面,而橡胶滚轮12的高度大于大于行走机构6,从而使得装置向墙面移动时,橡胶滚轮12对整个装置施加一个斜向上的力,其垂直方向的分力为装置的前端上升提供动力,并且,当装置以一定的速度爬墙时,冲击力较大,而通过弹簧二19的设置,橡胶滚轮12受到冲击力,会使得辅助臂13旋转,从而通过滑槽21带动滑杆二18向上,通过弹簧二19进行缓冲,从而对冲击力吸收,另外,当橡胶滚轮12收到撞击时,其水平方向的分力会使得整个橡胶滚轮12向后运动,使得调节滑块14向后压缩弹簧一16,而此时,由于辅助臂13的缓冲通过杠杆原理实现,向后运动时,整个杠杆结构的受力臂减小,从而使得缓冲力度较大,从而使得本装置可根据撞击的速度,自适应调节缓冲的软硬效果,当装置与墙面几乎平行时,启动气泵25,其能通过吸盘24将装置与墙面之间的气体抽出,从而通过气压作用使得装置吸附于墙面上,完成爬墙工作,由于气体进入吸盘24内时,杂质会随之进入,可能会造成堵塞,引起吸附力波动的情况,过滤网30能对进入吸盘24内的空气进行过滤,从而避免因堵塞造成的安全隐患,并且,通过滚珠29与弹簧三31的设置,其能保证吸盘24的距离无论如何调节,过滤网30均能可靠的对吸盘24与墙面之间的间隙进行过滤。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种高安全性的爬墙机器人
- 一种爬墙机器人及其串联机器人组