仿人表情机器人的头部结构和机器人
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及智能机器技术领域,具体涉及一种仿人表情机器人的头部结构和一种机器人。
背景技术
随着机器人行业发展,服务机器人也在迅速发展,人形机器人作为服务机器人的一种,其具有与人类相类似的外表特征,需要服务人们的同时,可以实现一些简单的仿人基本动作。心理学研究表明,人类的情感表达与信息交流超过60%是由非语言来实现的,如表情,眼神,头部动作等,其中,头部动作与面部表情占很大一部分比重。因此,在仿人机器人研究中,头部动作与面部表情实现是拟人化的重要基础,设计一种能易于表达仿人表情动作的机器人头部具有重要的意义。
相关技术中,国内外学者在仿人表情机器人结构设计有大量的研究,但都仅限于实验室水平,结构简单的表情模仿度不高,结构复杂的难以实现且成本较高。
发明内容
为解决上述技术问题,本发明的目的在于提出一种仿人表情机器人的头部结构,本发明的颈部机构采用基于平行四边形改进的差速锥齿轮结构,可实现颈部的回转、俯仰与侧摆耦合运动,并加强颈部运动的平稳性,减小齿轮间隙产生的影响,面部表情实现机构采用仿生设计的多连杆机构,使头部狭小的空间中实现眼部、眉头与嘴部的动作变化,从而形成各种表情动作,结构简单紧凑,动作灵活,可真实地模仿人类的摆头、摇头与点头动作,并实现皱眉头、眼睑开合、眼球转动、嘴巴拉伸与开合运动,使仿人机器人更加拟人化,从而更容易与人们进行人机交互活动。
本发明采用的技术方案如下:
本发明提出了一种仿人表情机器人的头部结构,包括:面部表情实现机构1、颈部机构2与基座3,其中,所述面部表情实现机构1与所述颈部机构2相连接,所述颈部机构2和所述基座3相连接,所述颈部机构2包括基于平行四边形的差速锥齿轮结构,所述颈部机构2用于而实现颈部回转、俯仰与侧摆运动,所述面部表情实现机构1包括多连杆驱动结构和外部硅胶皮肤,所述面部表情实现机构1用于实现面部皱眉头、眼睑开合、眼球转动、嘴巴拉伸与开合运动。
本发明上述提出的仿人表情机器人的头部结构还可以具有如下附加技术特征:
根据本发明的一个实施例,所述颈部机构2包括颈部俯仰侧摆机构与颈部回转机构,其中,所述颈部俯仰侧摆机构包括颈部舵机一201、颈部支撑板一202、颈部支撑板三206、平行四边形锥齿轮结构208、颈部舵机二209、小齿轮一2010、大齿轮一2011、大齿轮二2012、小齿轮二2013,所述颈部舵机一201、所述颈部舵机二209与所述小齿轮一2010、所述小齿轮二2013通过传动轴键槽连接;所述小齿轮一2010、所述小齿轮二2013分别与所述大齿轮一2011、所述大齿轮二2012啮合传动;所述大齿轮一2011、大齿轮二2012与所述平行四边形锥齿轮结构208连接;所述大齿轮一2011、所述大齿轮二2012在极限位置不做齿,以实现机械限位与自锁功能;所述平行四边形锥齿轮结构208与所述颈部支撑板一202、颈部支撑板三206固定连接;所述颈部回转机构包括颈部舵机三207、颈部支撑板二203、回转轴204、头颈连接板205,所述颈部舵机三207与所述回转轴204固定连接,并且与所述颈部支撑板二203中的圆锥滚子轴承过渡配合,所述回转轴204与头颈连接板通过紧定螺丝夹紧固定,从而与所述面部表情实现机构1连接。
根据本发明的一个实施例,所述平行四边形锥齿轮结构208包括:四边形框架板一20801、四边形框架板二20802、四边形框架板三20807、四边形框架板四20808、锥齿轮全轴20803、锥齿轮半轴一20806、锥齿轮半轴二20812、锥齿轮一20804、锥齿轮二20809、锥齿轮三20810、轴承座一20805、轴承座二20811,其中,所述四边形框架板一20801、所述四边形框架板三20807通过所述锥齿轮半轴一20806、所述锥齿轮半轴二20812与所述锥齿轮一20804、所述锥齿轮三20810传动连接,并且所述锥齿轮半轴一20806和所述锥齿轮半轴二20812采用三个深沟球轴承过渡配合,所述四边形框架板二20802、四边形框架板四20808通过所述锥齿轮全轴20803与所述锥齿轮二20809传动连接,并且所述锥齿轮全轴20803采用两个深沟球轴承过渡配合。
根据本发明的一个实施例,所述面部表情实现机构1包括面部骨架101、面部外壳102、眉毛运动机构103、眼部运动机构104与嘴部运动机构105,其中,所述面部骨架101通过螺栓连接所述面部外壳102、所述眉毛运动机构103、所述眼部运动机构104与所述嘴部运动机构105,所述嘴部运动机构105通过两侧支撑轴与所述面部外壳102连接,所述面部外壳包括外部硅胶皮肤。
根据本发明的一个实施例,所述眉毛运动机构103包括眉毛一10301、眉毛二10309、眉毛水平支架10302、眉毛竖直支架一10305、眉毛竖直支架二10306、眉毛舵机一10303、眉毛舵机二10304、眉毛舵机三10307、眉毛舵机四10308,其中,所述眉毛舵机二10304、所述眉毛舵机三10307通过所述眉毛竖直支架一10305、所述眉毛竖直支架二10306与所述面部骨架101固定连接,并且输出舵臂与所述眉毛水平支架10302相连,所述眉毛水平支架10302支撑所述眉毛舵机一10303、所述眉毛舵机四10308,所述眉毛舵机一10303、眉所述毛舵机四10308舵臂分别连接所述眉毛一10301、所述眉毛二10309,以带动所述眉毛一10301和所述眉毛二10309运动。
根据本发明的一个实施例,,所述眼部运动机构104包括眼球一10401、眼球二10411、眼部支架10406、眼睑舵机一10405、眼睑舵机二10404、眼睑舵机三10408、眼睑舵机四10409、上眼睑一10403、上眼睑二10410、下眼睑一10402、下眼睑二10412、眼球上下舵机10407、眼球左右舵机10413,其中,所述眼睑舵机一10405、所述眼睑舵机二10404、所述眼睑舵机三10408、所述眼睑舵机四10409、所述眼球上下舵机10407在所述眼部支架10406上固定,所述眼球左右舵机10413跟随眼球上下运动;所述眼睑舵机二10404、所述眼睑舵机四10409带动所述上眼睑一10403、所述上眼睑二10410开合;所述眼睑舵机一10405、所述眼睑舵机三10408带动所述下眼睑一10402、所述下眼睑二10412开合;所述眼球上下舵机10407带动所述眼球一10401、所述眼球二10411与所述眼球左右舵机10413上下运动;所述眼球左右舵机10413带动所述眼球一10401、所述眼球二10411左右运动。
根据本发明的一个实施例,所述眼部运动机构104中,眼球上下与左右耦合运动采用平行杆与曲柄摇杆耦合传动,所述眼部运动机构104包括眼球一10401、眼球上下舵机10407、眼球二10411、眼球左右舵机10413、平行连杆10414、眼球左右杆一10415、眼球上下杆一10416、眼球上下杆二10417、眼球左右杆二10418、眼球上下杆三10419,其中,所述眼球左右舵机10413与所述平行连杆10414铰接,所述平行连杆10414与所述眼球左右杆一10415、所述眼球左右杆二10418铰接,所述眼球左右杆一10415、所述眼球左右杆二10418分别对应与所述眼球一10401、所述眼球二10411固定连接,所述眼球上下舵机10407通过所述眼球上下杆一10416、所述眼球上下杆二10417与所述眼球上下杆三10419传动,形成摆动导杆结构,带动所述眼球一10401、所述眼球二10411与所述眼球左右舵机10413上下运动。
根据本发明的一个实施例,所述嘴部运动机构105包括下巴10501、嘴角一10502、嘴角二10509、下嘴角舵机一10503、下嘴角舵机二10508、上嘴角舵机一10504、上嘴角舵机二10507、下巴舵机一10505、下巴舵机二10506,其中,所述下嘴角舵机一10503、所述下嘴角舵机二10508、所述上嘴角舵机一10504、所述上嘴角舵机二10507、所述下巴舵机一10505、所述下巴舵机二10506均安装在所述面部骨架101上;所述下嘴角舵机一10503、所述上嘴角舵机一10504带动所述嘴角一10502在面颊xy两方向上运动;所述下嘴角舵机二10508、所述上嘴角舵机二10507带动所述嘴角二10509在面颊xy两方向上运动;所述下巴舵机一10505、所述下巴舵机二10506带动所述下巴10501开合运动,所述嘴角一10502、所述嘴角二10509通过弹性材料与牙床相连接。
本发明还提出了一种机器人,包括本发明上述的仿人表情机器人的头部结构。
本发明的有益效果:
本发明的本发明的颈部机构采用基于平行四边形改进的差速锥齿轮结构,可实现颈部的回转、俯仰与侧摆耦合运动,并加强颈部运动的平稳性,减小齿轮间隙产生的影响,面部表情实现机构采用仿生设计的多连杆机构,使头部狭小的空间中实现眼部、眉头与嘴部的动作变化,从而形成各种表情动作,结构简单紧凑,动作灵活,可真实地模仿人类的摆头、摇头与点头动作,并实现皱眉头、眼睑开合、眼球转动、嘴巴拉伸与开合运动,使仿人机器人更加拟人化,从而更容易与人们进行人机交互活动。
附图说明
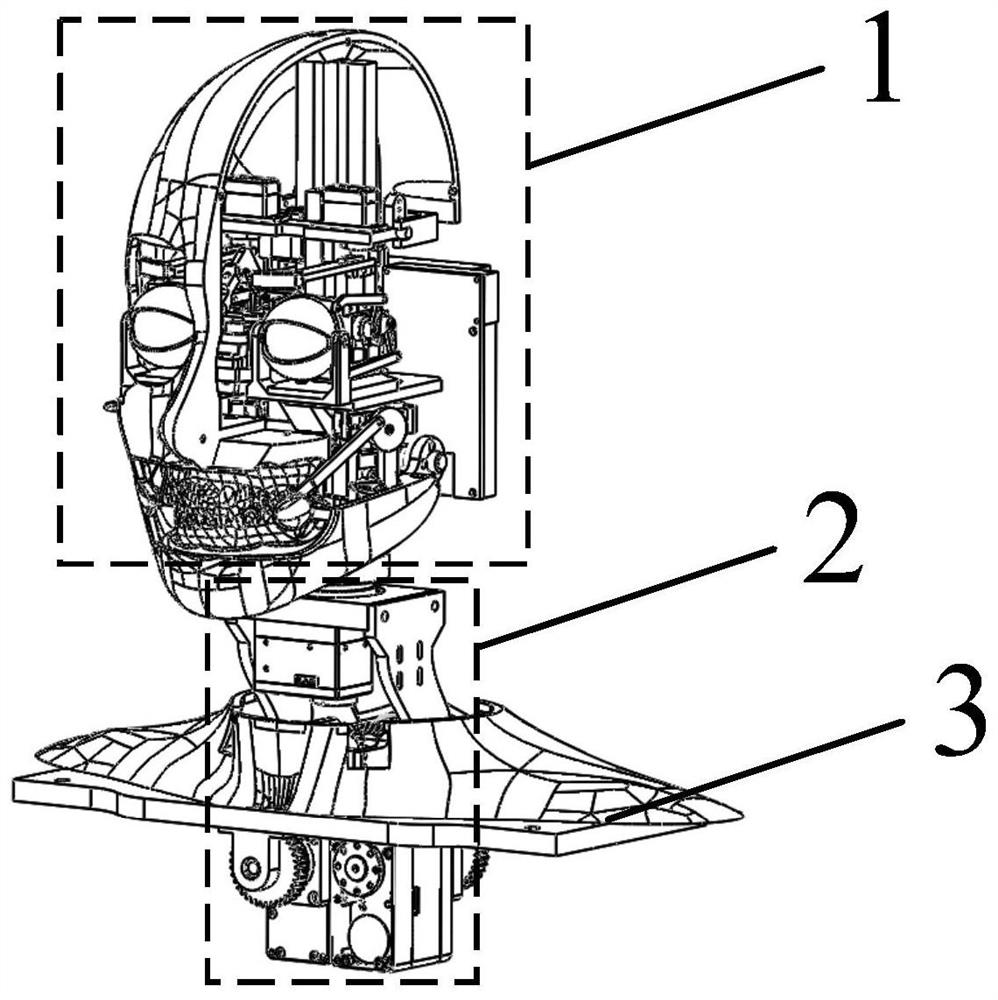
图1是根据本发明的一个实施例的仿人表情机器人的头部结构的结构示意图;
图2是根据本发明一个实施例的颈部机构的立体图;
图3是根据本发明一个实施例的颈部机构的正视图;
图4是根据本发明一个实施例的颈部机构右视图;
图5是根据本发明一个实施例的平行四边形锥齿轮结构的示意图;
图6是根据本发明一个实施例的面部表情实现机构的示意图;
图7是根据本发明一个实施例的眉毛运动机构示意图;
图8是根据本发明一个实施例的眼部运动机构的示意图;
图9是根据本发明一个实施例的眼球运动机构示意图;
图10是根据本发明一个实施例的嘴部运动机构示意图。
具体实施方式
本发明是发明人基于对以下问题的研究和认知做出的:
针对仿人表情机器人,针对颈部结构,目前大都采用连杆机构来实现颈部运动,然而,连杆机构并不能提供较大力矩来实现头部的俯仰与侧摆,这是因为头部运动时,颈部所受到的力矩是通过颈部杠杆原理放大后的力矩,在颈部如此狭小的空间中很难安置大力矩电机。虽然还提出一种差速锥齿轮机构,该结构头部运动时会产生较大抖动现象,因为头部所有重量都集中在锥齿轮啮合位置,运动时依靠啮合部分传动来实现颈部运动非常不稳定,而且该结构中电机的横向摆放非常影响颈部的仿生设计。
针对面部结构,目前面部表情运动机构采用滑轮与柔索的方式拉动皮肤时,然而该方式的运动方向不易控制,很难实现稳定的表情变化动作,且实现所需结构过于复杂,表情模仿度也不高。虽然有采用气动肌肉的方式实现表情变换,但气动肌肉的方式成本较高,而且以目前现有水平很难制作出可以类似人类面部肌肉运动的气动人工肌肉,该方式不具备实用价值。
总的来说,仿人表情头部的实现分为颈部三自由度和面部表情运动的实现。颈部实现的关键在于需要在电机尺寸大小、颈部外形满足仿人化的要求下,克服头部重量经过杠杆原理放大后的力矩。而面部表情实现关键在于外部皮肤的驱动方式,需要采用合适且稳定的结构,在头部狭小的空间中,实现仿人的器官与皮肤运动变化。
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
下面结合附图来描述本发明提出的仿人表情机器人的头部结构和机器人。
图1是根据本发明的一个实施例的仿人表情机器人的头部结构的结构示意图。如图1所示,该仿人表情机器人的头部结构包括:面部表情实现机构1、颈部机构2与基座3。其中,
面部表情实现机构1与颈部机构2相连接,颈部机构2和基座3相连接,颈部机构2包括基于平行四边形的差速锥齿轮结构,颈部机构2用于而实现颈部回转、俯仰与侧摆运动,面部表情实现机构1包括多连杆驱动结构和外部硅胶皮肤,面部表情实现机构1用于实现面部皱眉头、眼睑开合、眼球转动、嘴巴拉伸与开合运动。
具体地,颈部机构采用基于平行四边形改进的差速锥齿轮结构,可实现颈部的回转、俯仰与侧摆耦合运动,并加强颈部运动的平稳性,减小齿轮间隙产生的影响。面部表情实现机构采用仿生设计的多连杆机构,机构运动方向与人类面部表情动作方向相适应,应用平行四连杆、摆动导杆与四连杆两驱动结构组合,带动外部硅胶皮肤变形,在头部狭小的空间中实现眼部、眉头与嘴部的动作变化,从而形成各种表情动作。
该头部结构具有三自由度颈部机构与面部表情实现机构,结构简单紧凑、性能可靠且成本较低,可以灵活实现面部多种表情动作,可真实地模仿人类的摆头、摇头与点头动作,并实现皱眉头、眼睑开合、眼球转动、嘴巴拉伸与开合运动,使仿人机器人更加拟人化,从而更容易与人们进行人机交互活动。
图2是根据本发明一个实施例的颈部机构的立体图,图3是根据本发明一个实施例的颈部机构的正视图;图4是根据本发明一个实施例的颈部机构右视图。如图2-4所示,颈部机构2包括颈部俯仰侧摆机构与颈部回转机构。其中,颈部俯仰侧摆机构包括颈部舵机一201、颈部支撑板一202、颈部支撑板三206、平行四边形锥齿轮结构208、颈部舵机二209、小齿轮一2010、大齿轮一2011、大齿轮二2012、小齿轮二2013,颈部舵机一201、颈部舵机二209与小齿轮一2010、小齿轮二2013通过传动轴键槽连接;小齿轮一2010、小齿轮二2013分别与大齿轮一2011、大齿轮二2012啮合传动;大齿轮一2011、大齿轮二2012与平行四边形锥齿轮结构208连接;大齿轮一2011、大齿轮二2012在极限位置不做齿,以实现机械限位与自锁功能;平行四边形锥齿轮结构208与颈部支撑板一202、颈部支撑板三206固定连接;
颈部回转机构包括:颈部舵机三207、颈部支撑板二203、回转轴204、头颈连接板205,颈部舵机三207与回转轴204固定连接,并且与颈部支撑板二203中的圆锥滚子轴承过渡配合,回转轴204与头颈连接板通过紧定螺丝夹紧固定,从而与面部表情实现机构1连接。
具体地,如图2-4所示,颈部舵机一201、颈部舵机二209带动小齿轮一2010、小齿轮二2013旋转,然后小齿轮一2010、小齿轮二2013分别与大齿轮一2011、大齿轮二2012啮合传动,从而带动平行四边形锥齿轮结构208运行,实现差动特性,输出两个方向的运动。
进一步地,根据本发明的一个实施例,如图5所示,平行四边形锥齿轮结构208结合四边形框架稳定的特点改进差速锥齿轮机构,平行四边形锥齿轮结构208包括:四边形框架板一20801、四边形框架板二20802、四边形框架板三20807、四边形框架板四20808、锥齿轮全轴20803、锥齿轮半轴一20806、锥齿轮半轴二20812、锥齿轮一20804、锥齿轮二20809、锥齿轮三20810、轴承座一20805、轴承座二20811,其中,
四边形框架板一20801、四边形框架板三20807通过锥齿轮半轴一20806、锥齿轮半轴二20812与锥齿轮一20804、锥齿轮三20810传动连接,并且锥齿轮半轴一20806和锥齿轮半轴二20812采用三个深沟球轴承过渡配合,四边形框架板二20802、四边形框架板四20808通过锥齿轮全轴20803与锥齿轮二20809传动连接,并且锥齿轮全轴20803采用两个深沟球轴承过渡配合。
具体地,如图5所示,平行四边形锥齿轮结构208为四边形改进的差速锥齿轮结构示意图。锥齿轮一20804、锥齿轮三20810转动角度之和为锥齿轮二20809绕锥齿轮半轴一20806、锥齿轮半轴二20812的转动角度,从而输出颈部的侧摆运动;两者之差为锥齿轮二20809自转的转动角度,从而输出颈部的俯仰运动。颈部舵机三207驱动回转轴204带动头颈连接板205旋转。
颈部机构使用平行四边形框架改进差速锥齿轮机构,加强颈部运动的平稳性,减小齿轮间隙对颈部三自由度运动的影响,将头部重量集中在平行四边形框架上,减小锥齿轮啮合传动时所承受的头部力矩,从而消除颈部运动时的抖动,使运动平滑,实现逼真的颈部三自由度运动。并采用齿轮传动的方式,将电机从两侧水平放置转移为竖直放置,并通过传动比放大电机力矩,并且齿轮在极限位置不做齿,从而实现机械限位与自锁功能。
根据本发明的一个实施例,如图6所示,面部表情实现机构1按照仿生机理设计,采取稳定可靠的多连杆驱动外部硅胶皮肤运动的方式,面部表情实现机构1包括面部骨架101、面部外壳102、眉毛运动机构103、眼部运动机构104与嘴部运动机构105,其中,
面部骨架101作为整体支架,通过螺栓连接面部外壳102、眉毛运动机构103、眼部运动机构104与嘴部运动机构105,嘴部运动机构105通过两侧支撑轴与面部外壳102连接,面部外壳包括外部硅胶皮肤,完成整体面部表情实现机构。
具体地,面部表情实现机构1采取稳定可靠的多连杆驱动外部硅胶皮肤运动的方式。眉毛运动机构103、眼部运动机构104与嘴部运动机构105输出各器官对应运动,从而带动附着于面部外壳102的硅胶皮肤产生相应的变形,模仿类人运动。
根据本发明的一个实施例,如图7所示,眉毛运动机构103采用仿人眉毛运动机理设计,眉毛运动机构103包括眉毛一10301、眉毛二10309、眉毛水平支架10302、眉毛竖直支架一10305、眉毛竖直支架二10306、眉毛舵机一10303、眉毛舵机二10304、眉毛舵机三10307、眉毛舵机四10308,其中,
眉毛舵机二10304、眉毛舵机三10307通过眉毛竖直支架一10305、眉毛竖直支架二10306与面部骨架101固定连接,并且输出舵臂与眉毛水平支架10302相连,眉毛水平支架10302支撑眉毛舵机一10303、眉毛舵机四10308,眉毛舵机一10303、眉毛舵机四10308舵臂分别连接眉毛一10301、眉毛二10309,以带动眉毛一10301和眉毛二10309运动。
具体地,眉毛运动机构103采用仿人眉毛运动机理设计连杆机构。眉毛舵机二10304、眉毛舵机三10307带动眉毛水平支架10302上下摆动,从而驱动眉毛一10301、眉毛二10309、眉毛舵机一10303、眉毛舵机四10308一起上下摆动,带动外部硅胶皮肤上下挤压,模仿眉头上扬,压眉头的动作。眉毛舵机一10303、眉毛舵机四10308分别驱动眉毛一10301、眉毛二10309左右摆动,带动外部皮肤左右挤压变形,从而实现邹眉头。
根据本发明的一个实施例,如图8所示,眼部运动机构104包括眼球一10401、眼球二10411、眼部支架10406、眼睑舵机一10405、眼睑舵机二10404、眼睑舵机三10408、眼睑舵机四10409、上眼睑一10403、上眼睑二10410、下眼睑一10402、下眼睑二10412、眼球上下舵机10407、眼球左右舵机10413,其中,
眼睑舵机一10405、眼睑舵机二10404、眼睑舵机三10408、眼睑舵机四10409、眼球上下舵机10407在眼部支架10406上固定,眼球左右舵机10413跟随眼球上下运动;眼睑舵机二10404、眼睑舵机四10409带动上眼睑一10403、上眼睑二10410开合;眼睑舵机一10405、眼睑舵机三10408带动下眼睑一10402、下眼睑二10412开合;眼球上下舵机10407带动眼球一10401、眼球二10411与眼球左右舵机10413上下运动;眼球左右舵机10413带动眼球一10401、眼球二10411左右运动。
具体地,眼部运动机构采用曲柄摇杆与平行四连杆机构模拟眼部动作。眼睑舵机二10404、眼睑舵机四10409带动上眼睑一10403、上眼睑二10410开合;眼睑舵机一10405、眼睑舵机三10408带动下眼睑一10402、下眼睑二10412开合;眼球上下舵机10407带动眼球一10401、眼球二10411与眼球左右舵机10413上下运动;眼球左右舵机10413带动眼球一10401、眼球二10411左右运动。
根据本发明的一个实施例,如图9所示,眼部运动机构104中,眼球上下与左右耦合运动采用平行杆与曲柄摇杆耦合传动,眼部运动机构104包括眼球一10401、眼球上下舵机10407、眼球二10411、眼球左右舵机10413、平行连杆10414、眼球左右杆一10415、眼球上下杆一10416、眼球上下杆二10417、眼球左右杆二10418、眼球上下杆三10419,其中,
眼球左右舵机10413与平行连杆10414铰接,平行连杆10414与眼球左右杆一10415、眼球左右杆二10418铰接,眼球左右杆一10415、眼球左右杆二10418分别对应与眼球一10401、眼球二10411固定连接,眼球上下舵机10407通过眼球上下杆一10416、眼球上下杆二10417与眼球上下杆三10419传动,形成摆动导杆结构,带动眼球一10401、眼球二10411与眼球左右舵机10413上下运动。
具体地,眼球左右舵机10413通过平行连杆10414带动眼球左右杆一10415、眼球左右杆二10418、眼球一10401、眼球二10411同时运动,眼球上下舵机10407通过眼球上下杆一10416、眼球上下杆二10417与眼球上下杆三10419传动,形成摆动导杆结构,带动眼球一10401、眼球二10411与眼球左右舵机10413上下运动,从而实现眼球上下左右耦合运动,动作灵活。
根据本发明的一个实施例,如图9所示,嘴部运动机构105包括下巴10501、嘴角一10502、嘴角二10509、下嘴角舵机一10503、下嘴角舵机二10508、上嘴角舵机一10504、上嘴角舵机二10507、下巴舵机一10505、下巴舵机二10506,其中,下嘴角舵机一10503、下嘴角舵机二10508、上嘴角舵机一10504、上嘴角舵机二10507、下巴舵机一10505、下巴舵机二10506均安装在面部骨架101上;下嘴角舵机一10503、上嘴角舵机一10504带动嘴角一10502在面颊xy两方向上运动;下嘴角舵机二10508、上嘴角舵机二10507带动嘴角二10509在面颊xy两方向上运动;下巴舵机一10505、下巴舵机二10506带动下巴10501开合运动,嘴角一10502、嘴角二10509通过弹性材料与牙床相连接,通过特殊弹性材料与牙床相连接,从而使动作相互耦合,结合下巴开合运动实现多样的嘴部变。
具体地,x、y方向指在三维空间坐标系中的x、y方向,即上下方向和左右方向。下嘴角舵机一10503、上嘴角舵机一10504带动嘴角一10502在面颊xy两方向上耦合运动;下嘴角舵机二10508、上嘴角舵机二10507带动嘴角二10509在面颊xy两方向上耦合运动;下巴舵机一10505、下巴舵机二10506带动下巴10501开合运动,三种动作相互耦合,实现多样的结构运动变化,从而带动弹性材料与外部硅胶皮肤变形,实现嘴部的动作变化。
由上,面部表情实现机构具有眉毛、眼部与嘴部运动机构,可以实现皱眉头、眼睑开合、眼球转动、嘴巴拉伸与开合运动。眉毛运动机构采用四舵机三连杆结构,实现眉毛上下,左右的耦合运动,运动方向模仿真实眉毛在面部的运动方向;眼部运动机构结合平行四连杆、摆动导杆相结合,实现上下眼睑开合与眼球上下左右耦合运动;嘴部运动机构采用四连杆两驱动机构,模拟两侧嘴角在面部x、y方向拉伸运动,并结合下巴开合,形成多种运动组合,带动嘴部硅胶皮肤变形,模拟多样的嘴部变化。该面部表情实现机构在头部狭小空间中,以人类基本的表情器官动作变化为参考,实现逼真的表情动作,该结构简单,均采用刚性连接传动,运行稳定,成本较低。
综上,根据本发明实施例的仿人表情机器人的头部结构,颈部机构采用基于平行四边形改进的差速锥齿轮结构,可实现颈部的回转、俯仰与侧摆耦合运动,并加强颈部运动的平稳性,减小齿轮间隙产生的影响,面部表情实现机构采用仿生设计的多连杆机构,使头部狭小的空间中实现眼部、眉头与嘴部的动作变化,从而形成各种表情动作,结构简单紧凑,动作灵活,可真实地模仿人类的摆头、摇头与点头动作,并实现皱眉头、眼睑开合、眼球转动、嘴巴拉伸与开合运动,使仿人机器人更加拟人化,从而更容易与人们进行人机交互活动。
此外,本发明还提出一种机器人,包括本发明上述的仿人表情机器人的头部结构。
根据本发明实施例的机器人,通过上述的仿人表情机器人的头部结构,颈部机构采用基于平行四边形改进的差速锥齿轮结构,可实现颈部的回转、俯仰与侧摆耦合运动,并加强颈部运动的平稳性,减小齿轮间隙产生的影响,面部表情实现机构采用仿生设计的多连杆机构,使头部狭小的空间中实现眼部、眉头与嘴部的动作变化,从而形成各种表情动作,结构简单紧凑,动作灵活,可真实地模仿人类的摆头、摇头与点头动作,并实现皱眉头、眼睑开合、眼球转动、嘴巴拉伸与开合运动,使机器人更加拟人化,从而更容易与人们进行人机交互活动。
在本发明的描述中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。“多个”的含义是两个或两个以上,除非另有明确具体地限定。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件车厢内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必针对相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 仿人表情机器人头部结构及机器人头部控制系统
- 一种仿人表情机器人的头部结构和机器人