一种车辆与ADAS传感器标靶的校准方法及可动基座
文献发布时间:2023-06-19 11:26:00
技术领域
本申请涉及汽车维护修理和制造领域,尤其是涉及一种车辆与ADAS传感器标靶的校准方法及可动基座。
背景技术
高级驾驶辅助系统(ADAS系统)是利用安装在车上的各式各样传感器(毫米波雷达、激光雷达、单\双目摄像头以及卫星导航),在汽车行驶过程中随时来感应周围的环境,收集数据,进行静态、动态物体的辨识、侦测与追踪,并结合导航地图数据,进行系统的运算与分析,从而预先让驾驶者察觉到可能发生的危险,有效增加汽车驾驶的舒适性和安全性。
为了实现上述ADAS系统上的功能,各式各样的ADAS系统传感器位置必须准确地安装在汽车的对应位置上;因此在安装ADAS系统传感器,必须在车辆上找到对应的位置。
目前,美国HUNTER公司(专利公开号:CN109791045A)在校准传感器的标定板上设计和安装带有测量相机的横梁,通过相机对车轮上安装的四轮定位仪目标靶进行照相,通过对相机成像的数值分析,指示移动标定板来实现对正。
申请人认为上述装置在校准车辆和标靶时,需要调节汽车位置,存在操作不易的问题。
发明内容
为了解决校准车辆和标靶时操作不易,本申请提供一种便于操作的车辆与ADAS传感器标靶的校准方法及可动基座。
第一方面,本申请提供的一种便于操作的车辆与ADAS传感器标靶的校准方法采用如下的技术方案:
一种车辆与ADAS传感器标靶的校准方法,包括以下步骤:
在待校车辆两个后轮的的轴线上安装定位校准辅助件;
在可动基座上安装ADAS标靶以及处于同一轴线上两个可调校准辅助件;
将可动基座置于待校车辆的待位置校准的一侧,使得两个定位校准辅助件和两个可调校准辅助件之间大致构成一个矩形;
主机基于获取两个可调校准辅助件以及两个定位校准辅助件的相对位置信息,计算获得实时的待校车辆的车架中心线、待校车辆和可动基座之间的几何中心线以及两侧相对的定位校准辅助件和可调校准辅助件之间的距离信息;
平行于待校车辆移动可动基座,直至车架中心线和几何中心线重合;
调节可动基座相对于待校车辆之间的角度,使得两侧相对的定位校准辅助件和可调校准辅助件之间的距离相等;
移动可动基座,调节可动基座和待校车辆之间的距离,直至两侧相对的定位校准辅助件和可调校准辅助件之间的距离均等于预设测试距离。
通过采用上述技术方案,通过在可动基座上安装调校准辅助件,在待校车辆上安装定位校准辅助件,使得主机可以获取可动基座的位置和待校车辆的位置,主机位置信息计算,可以获得待校车辆和可动基座之间的偏转角度和偏移距离;调节时,操作者能够根据偏转角度和偏移距离,移动可动基座,使得可动基座的中点处在待校车辆的中轴线上,之后通过调节基座的角度和待校车辆的距离,实现可动基座和待校车辆的中轴线重合,且距离等于预设距离。而此时由于可动基座的特定位置上安装ADAS标靶,因此ADAS标靶跟随可动基座也到了校准的位置;整体过程中操作者无需移动汽车,仅需移动可动基座就可以实现ADAS标靶和待校车辆之间的校准,校准方便且便于操作。
优选的,所述定位校准辅助件和可调校准辅助件均为四轮定位仪测量靶,所述主机包括相机和计算机,所述相机获取定位校准辅助件和可调校准辅助件的图像信息,所述计算机基于获取的图像信息获取定位校准辅助件和可调校准辅助件的图像的相对位置信息。
通过采用上述技术方案,通过相机拍摄获取定位校准辅助件和可调校准辅助件的测量靶的图像数据,之后计算机通过现有的四轮定位仪测试方法通过图像数据转化为位置数据,从而能够快速获取定位校准辅助件和可调校准辅助件的图像的相对位置信息。
优选的,所述定位校准辅助件和可调校准辅助件均为内置有无线模块的线阵CCD四轮定位测量头,所述主机分别无线通信获取定位校准辅助件和可调校准辅助件输出的相对位置信息。
通过采用上述技术方案,线阵CCD四轮定位测量头除了不能获取矩形对角上的线阵CCD四轮定位测量头相对位置外,能够获得矩形相邻的两个角上的线阵CCD四轮定位测量头的相对位置信息,而通过主机同时获取四个线阵CCD四轮定位测量头通过无线模块输出的相对位置信息,就能够通过计算快速算出定位校准辅助件和可调校准辅助件的相对位置信息。
优选的,所述主机基于两个定位校准辅助件的相对位置信息计算获得所述待校车辆的车架中心线;所述主机基于两个可调校准辅助件以及两个定位校准辅助件的相对位置信息计算获得待校车辆和可动基座之间的几何中心线。
通过采用上述技术方案,通过两个定位校准辅助件的相对位置信息做中垂线,就可以获得待校车辆的车架中心线;通过主机基于两个可调校准辅助件的相对位置信息获得两个可调校准辅助件的中点,基于两个定位校准辅助件的相对位置信息获得两个定位校准辅助件的中点,连接两个中点即可以获得几何中心线。
第二方面,本申请提供一种应用于上述车辆与标靶校准方法的可动基座,采用如下的技术方案:
一种应用于车辆与标靶校准方法的可动基座,包括可动底座、主基体、附基体、校准安装梁和ADAS相机靶架,所述主基体固定安装于可动底座上侧,所述附基体水平连接于所述主基体的一侧,所述校准安装梁水平固定于主基体远离附基体的一侧,所述ADAS相机靶架固定连接于附基体上侧;所述校准安装梁的两端固定连接有供所述定位校准辅助件的辅助件安装管;所述校准安装梁的两侧设置有雷达靶座。
通过采用上述技术方案,可动底座的设置,使得基座可以进行运动调节;通过水平设置的校准安装梁两端固定辅助件安装管,使得定位校准辅助件无需其他夹持部件能够快速的安装在校准安装梁上;校准安装梁的两侧水平滑移连接有雷达靶座,使得校准安装梁还可以作为水平的滑移底座供雷达标靶安装,以适合各种类型车辆的安装。
优选的,所述可动底座包括运动层、调中层、调距层和调向层,所述运动层的底部安装有若干万向轮,所述调中层沿平行于所述校准安装梁长度方向水平滑移于运动层上,所述调距层沿垂直于所述校准安装梁长度方向水平滑移于调中层上,所述调向层以竖直方向为轴向转动连接于调距层上,所述主基体固定安装于所述调向层上,且所述调距层和所述主基体中心轴线重合。
通过采用上述技术方案,通过运动层、调中层、调距层和调向层的四层设计,在标靶和待校车辆校准的过程中,首先可以通过移动运动层让可动基座任意滑移,直至可动基座整体置于待校车辆的待位置校准的一侧,并使得两个定位校准辅助件和两个可调校准辅助件之间大致构成一个矩形。之后通过移动调中层,使得主基体平行于待校车辆移动,直至车架中心线和几何中心线重合;而后通过转动调向层调节可动基座相对于待校车辆之间的角度,使得主基体两侧相对的定位校准辅助件和可调校准辅助件之间的距离相等;最后移动调距层,调节主基体和待校车辆之间的距离,直至两侧相对的定位校准辅助件和可调校准辅助件之间的距离均等于预设测试距离;完成ADAS标靶的位置校正。整体过程中,由于调中层、调距层和调向层其他自由度被限制,从而减少了平移时带来转动或偏移,或转动时带来偏移的问题出现,方便了主基体的调节。
优选的,所述运动层上安装有平行于所述校准安装梁长度方向的调中丝杆,所述调中层底部固定连接有安装于所述调中丝杆上的调中滑块,所述运动层上设置有用于驱使所述调中丝杆转动的调中驱动件;所述调中层上安装有垂直于所述校准安装梁长度方向的调距丝杆,所述调距层底部固定连接有安装于所述调距丝杆上的调距滑块,所述调中层上设置有用于驱使所述调距丝杆转动的调距驱动件。
通过采用上述技术方案,通过调中驱动件驱动调中丝杆转动,能够使得调中层的滑移更加省力且利于微小地调节调中层的位置;同理,通过调距驱动件驱动调距丝杆转动,能够使得调距层的滑移更加省力且利于微小地调节调距层的位置。
优选的,所述调中驱动件滑移连接于所述运动层上,所述调中驱动件包括联动所述调中丝杆转动的调中联动位以及解除和所述调中丝杆联动的调中断联位,所述调中驱动件上连接有用于截止所述调向层转动的第一截止件;当所述调中丝杆处于调中联动位时,第一截止件接近所述调向层,使得所述调向层被限制转动;当所述调中丝杆处于调中断联位时,第一截止件远离所述调向层,使得所述调向层可以转动;
所述调距驱动件滑移连接于所述调中层上,所述调距驱动件包括联动所述调距丝杆转动的调距联动位以及解除和所述调中丝杆联动的调距断联位,所述调距驱动件上连接有用于截止所述调向层转动的第二截止件;当所述调距丝杆处于调距联动位时,第二截止件接近所述调向层,使得所述调向层被限制转动;当所述调距丝杆处于调距断联位时,第二截止件远离所述调向层,使得所述调向层可以转动。
通过采用上述技术方案,当所述调中丝杆处于调中联动位时,第一截止件接近所述调向层,使得所述调向层被限制转动,因此当调中层调中的过程中,调向层无法转动;同理,当所述调距丝杆处于调距联动位时,第二截止件接近所述调向层,使得所述调向层被限制转动,因此当调距层调中的过程中,调向层无法转动;
同时,当所述调距丝杆处于调距断联位时,第二截止件远离所述调向层,使得所述调向层可以转动,当所述调中丝杆处于调中断联位时,第一截止件远离所述调向层,使得所述调向层可以转动因此当调向层转动的过程中,调中层和调距层无法滑移。进一步保证了调节的准确性。
优选的,所述调向层底部固定连接有架高盘,使得调向层和调距层之间产生截止间隙,所述调向层面向调距层的端面构成刹车面,所述第一截止件和第二截止件可插入截止间隙的抵接刹车面。
通过采用上述技术方案,由于调向层底部的刹车面足够大,因此在调向层水平位置发生微调后,第一截止件和第二截止件也可插入截止间隙的抵接刹车面限制调向层转动。
优选的,所所述附基体沿竖直方向可滑移地连接在所述主基体上, 所述校准安装梁的两侧水平滑移连接有雷达靶座。
通过采用上述技术方案,使得ADAS相机靶架的高度可以调节和雷达靶座水平位置可以调节,从而使得调节能够适应不同的车型。
综上所述,本申请包括以下至少一种有益技术效果:
1.车辆与标靶校准仅需移动可动基座操作方便;
2.利用现有的四轮定位仪系统主机就能够实现车辆与标靶校准,无需使得制造商和维修商无需额外购置ADAS校准设备。
附图说明
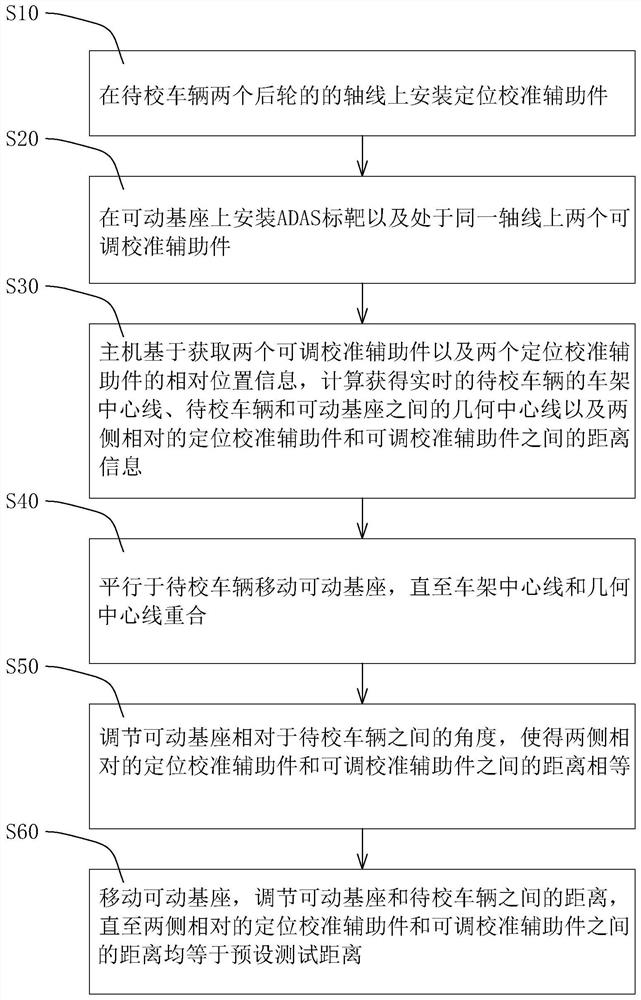
图1是车辆与ADAS传感器标靶的校准方法的流程示意图;
图2是校准辅助件为四轮定位仪测量靶时的测量示意图;
图3是校准辅助件为线阵CCD四轮定位测量头时的测量示意图;
图4是可动基座的结构示意图;
图5是可动底座的结构示意图;
图6是可动底座的爆炸结构示意图;
图7是图6中A的放大示意图;
图8是图6中B的放大示意图。
附图标记说明:1、主机;2、可动基座;3、待校车辆;4、定位校准辅助件;5、可调校准辅助件;21、可动底座;22、主基体;23、附基体;24、校准安装梁;25、ADAS相机靶架;26、雷达靶座;27、辅助件安装管;211、运动层;212、调中层;213、调距层;214、调向层;215、万向轮;216、架高盘;301、调中丝杆;302、调中滑块;303、调中驱动件;304、调中驱动杆;305、调中手轮;306、调中主动轮;307、调中从动轮;401、调距丝杆;402、调距滑块;403、调距驱动件;404、调距驱动杆;405、调距手轮;406、调距主动轮;407、调距从动轮;50、第一截止件;501、第一竖杆;502、第一横杆;503、第一刹车块;60、第二截止件;601、第二竖杆;602、第二横杆;603、第二刹车块。
具体实施方式
以下结合附图1-8对本申请作进一步详细说明。
一种车辆与ADAS传感器标靶的校准方法,可通过现有的四轮定位仪系统和可动基座2配合实现对车辆与ADAS传感器标靶的校准,如图1所示,具体包括以下步骤:
S10、在待校车辆3两个后轮的的轴线上安装定位校准辅助件4;
其中,定位校准辅助件4可以直接采用现有的汽车四轮定位仪上的校准辅助件;即定位校准辅助件4可以为四轮定位仪测量靶或者线阵CCD四轮定位测量头。
定位校准辅助件4和后轮的安装方式,一般先通过在后轮轮毂的外壁上夹紧固定定位夹具,使得定位夹具的中心轴和后轮轮毂的中心轴同轴。之后将四轮定位仪测量靶或者线阵CCD四轮定位测量头插接固定在定位夹具的中心轴上,实现四轮定位仪测量靶或者线阵CCD四轮定位测量头安装汽车后轮毂的轴线。值得一提的是,本申请中应用的定位夹具,本领域中应用的可实现上述功能的任一定位夹具,故不再赘述。
S20、在可动基座2上安装ADAS标靶以及处于同一轴线上两个可调校准辅助件5;
ADAS标靶为汽车ADAS传感器的标定靶,一般本申请中所指的ADAS标靶至少包括ADAS雷达标定靶和ADAS相机标定靶。其中,当ADAS雷达标定靶和ADAS相机标定靶在可动基座2相对于车辆位置准确时,仅在车辆上的ADAS相机安装位置准确,才能获得获取ADAS相机标定靶的标准图像信息;同理尽在ADAS雷达的安装位置准确才能获得获取ADAS雷达标定靶的标准雷达信息。
两个可调校准辅助件5和上述的定位校准辅助件4构成汽车四轮定位仪上的校准辅助件。如图2所示,因此当定位校准辅助件4为四轮定位仪测量靶时,则可调校准辅助件5为四轮定位仪测量靶。如图3所示,当定位校准辅助件4为线阵CCD四轮定位测量头时,则可调校准辅助件5为线阵CCD四轮定位测量头。
S30、主机1基于获取两个可调校准辅助件5以及两个定位校准辅助件4的相对位置信息,计算获得实时的待校车辆3的车架中心线、待校车辆3和可动基座2之间的几何中心线以及两侧相对的定位校准辅助件4和可调校准辅助件5之间的距离信息;
主机1、定位校准辅助件4、可调校准辅助件5三者可构成了四轮定位仪系统。即可通过现有的四轮定位仪系统直接获取主机1、定位校准辅助件4、可调校准辅助件5。
如图2所示,而当定位校准辅助件4和可调校准辅助件5均为四轮定位仪测量靶,主机1包括相机和计算机,相机获取定位校准辅助件4和可调校准辅助件5的图像信息,计算机基于获取的图像信息获取定位校准辅助件4和可调校准辅助件5的图像的相对位置信息。
如图3所示,因此当定位校准辅助件4和可调校准辅助件5均为线阵CCD四轮定位测量头的情况下,定位校准辅助件4和可调校准辅助件5将内置无线模块,无线模块一般采用蓝牙模块。主机1能够通过分别无线通信获取定位校准辅助件4和可调校准辅助件5输出的相对位置信息。
而上述两种方式下,主机1计算获取定位校准辅助件4和可调校准辅助件5的位置方式可以直接采用四轮定位仪系统计算获得。故不在赘述。
具体的,主机1基于两个定位校准辅助件4的相对位置信息做中垂线,就可以计算获得待校车辆3的车架中心线;通过两个定位校准辅助件4的相对位置信息通过主机1基于两个可调校准辅助件5的相对位置信息获得两个可调校准辅助件5的中点,基于两个定位校准辅助件4的相对位置信息获得两个定位校准辅助件4的中点,连接两个中点即可以获得待校车辆3和可动基座2之间的几何中心线。而两侧相对的定位校准辅助件4和可调校准辅助件5之间的距离信息可以通过定位校准辅助件4和可调校准辅助件5的相对位置信息之间计算获得。
S40、平行于待校车辆3移动可动基座2,直至车架中心线和几何中心线重合;
通过主机1的反馈,操作人员平行于待校车辆3移动可动基座2,能够使得可动基座2的中点相对于待校车辆3移动,当车架中心线和几何中心线重合时,实现可动基座2的中点处在待校车辆3的车架中心线上。
S50、调节可动基座2相对于待校车辆3之间的角度,使得两侧相对的定位校准辅助件4和可调校准辅助件5之间的距离相等;
通过主机1的反馈,操作人员调节可动基座2相对于待校车辆3之间的角度,当两侧相对的定位校准辅助件4和可调校准辅助件5之间的距离相等时,则可动基座2将平行于待校车辆3。
S60、移动可动基座2,调节可动基座2和待校车辆3之间的距离,直至两侧相对的定位校准辅助件4和可调校准辅助件5之间的距离均等于预设测试距离。
通过移动移动可动基座2,调节可动基座2和待校车辆3之间的距离,当两侧相对的定位校准辅助件4和可调校准辅助件5之间的距离均等于预设测试距离;则ADAS标靶位置完全对正,完成ADAS标靶的位置校正。
综上,整体过程中操作者无需移动汽车,仅需移动可动基座2就可以实现ADAS标靶和待校车辆3之间的校准,校准方便且便于操作。
如图4所示,本申请提供一种应用于上述车辆与标靶校准方法的可动基座2,包括可动底座21、主基体22、附基体23、校准安装梁24和ADAS相机靶架25,主基体22固定安装于可动底座21上侧,附基体23水平连接于所述主基体22的一侧,校准安装梁24水平固定于主基体22远离附基体23的一侧,ADAS相机靶架25固定连接于附基体23上侧;校准安装梁24的两端固定连接有供所述定位校准辅助件4的辅助件安装管27;校准安装梁24的两侧安装有雷达靶座26。
如图4所示,进行车辆与标靶校准时,在可动基座2的ADAS相机靶架25上安装ADAS相机标定靶,在雷达靶座26上安装ADAS雷达标定靶。在校准安装梁24两端的辅助件安装管27内插接固定可调校准辅助件5。之后将可动基座2移动至待校车辆3的需要安装ADAS传感器的一侧,如待校车辆3前侧要安装ADAS传感器,则可动基座2移动至待校车辆3的前侧;若待校车辆3后侧要安装ADAS传感器,则可动基座2移动至待校车辆3的后侧。
同时为了使得可动基座2能够适应对各类车辆进行校准,校准安装梁24的两侧安装有雷达靶座26可水平滑移的安装在校准安装梁24的上端面;附基体23沿竖直方向可滑移的固定连接在所述主基体22上。
具体的,如图4所示,雷达靶座26在校准安装梁24的上端面沿水平方向开设滑道,雷达靶座26嵌入滑道,并滑移连接在滑道内,并且雷达靶座26上设置有定位螺栓;在旋松定位螺栓时,能够滑移雷达靶座26,调节雷达靶座26的位置,而在旋紧定位螺栓后,也能够实现雷达靶座26位置的固定。同时为了保证雷达靶座26位置的准确性,在校准安装梁24的端面两侧上设置了刻度尺,便于操作人员对应雷达靶座26的位置。
同理的,如图4所示,主基体22上竖直设置有滑移管,附基体23上固定有插接于滑移管内的插接杆。并且滑移管上设置有定位螺栓;在旋松定位螺栓时,可以滑移插接杆,调节ADAS相机靶架25的高度位置,而在旋紧定位螺栓后,也能够固定ADAS相机靶架25的高度位置。
如图4、图5所示,可动底座21包括由下至上依次包括运动层211、调中层212、调距层213和调向层214,运动层211的底部安装有若干万向轮215,调中层212沿平行于校准安装梁24长度方向水平滑移于运动层211上,调距层213沿垂直于校准安装梁24长度方向水平滑移于调中层212上,调向层214以竖直方向为轴向转动连接于调距层213上,主基体22固定安装于所述调向层214上,且所述调距层213和所述主基体22中心轴线重合。
如图4、图5所示,通过运动层211、调中层212、调距层213和调向层214的四层设计,在标靶和待校车辆3校准的过程中,首先可以通过移动运动层211让可动基座2任意滑移,直至可动基座2整体置于待校车辆3的待位置校准的一侧,并使得两个定位校准辅助件4和两个可调校准辅助件5之间大致构成一个矩形。之后通过移动调中层212,使得主基体22平行于待校车辆3移动,直至车架中心线和几何中心线重合;而后通过转动调向层214调节可动基座2相对于待校车辆3之间的角度,使得主基体22两侧相对的定位校准辅助件4和可调校准辅助件5之间的距离相等;最后移动调距层213,调节主基体22和待校车辆3之间的距离,直至两侧相对的定位校准辅助件4和可调校准辅助件5之间的距离均等于预设测试距离;完成ADAS标靶的位置校正。整体过程中,由于调中层212、调距层213和调向层214其他自由度被限制,从而减少了平移时带来转动或偏移,或转动时带来偏移的问题出现,方便了主基体22的调节。
进一步的,如图4、图6所示,运动层211上安装有平行于所述校准安装梁24长度方向的调中丝杆301,调中层212底部固定连接有安装于调中丝杆301上的调中滑块302,运动层211上设置有用于驱使调中丝杆301转动的调中驱动件303;通过调中驱动件303驱动调中丝杆301转动,能够使得调中层212的滑移更加省力且利于微小地调节调中层212的位置。
如图4、图6所示,调中驱动件303滑移连接于运动层211上,调中驱动件303包括联动调中丝杆301转动的调中联动位以及解除和所述调中丝杆301联动的调中断联位,调中驱动件303上连接有用于截止所述调向层214转动的第一截止件50;当调中丝杆301处于调中联动位时,第一截止件50接近调向层214,使得调向层214被限制转动;当调中丝杆301处于调中断联位时,第一截止件50远离所述调向层214,使得调向层214可以转动。
具体的,如图6、图7所示,调中驱动件303包括转动连接在运动层211侧壁上的调中驱动杆304、固定连接在调中驱动杆304端部的调中手轮305以及键连接在调中固定杆上的调中主动轮306,调中主动轮306是齿轮;调中丝杆301面向调中驱动件303的一侧穿出运动层211的侧壁,且在调中丝杆301穿出的一侧上固定连接有和调中主动轮306啮合的调中从动轮307。当调中驱动杆304向运动层211一侧滑移时,调中驱动杆304的键插入调中主动轮306中,调中驱动杆304可驱动调中主动轮306转动,第一截止件50接近调向层214,调中驱动件303处于调中联动位;当调中驱动杆304向远离运动层211一侧滑移时,调中驱动杆304的键脱离调中主动轮306中,调中驱动杆304无法驱动调中主动轮306转动,第一截止件50远离调向层214,调中驱动件303处于调中断联位。
进一步的,如图4、图6所示,调中层212上安装有垂直于所述校准安装梁24长度方向的调距丝杆401,调距层213底部固定连接有安装于所述调距丝杆401上的调距滑块402,调中层212上设置有用于驱使所述调距丝杆401转动的调距驱动件403。通过调距驱动件403驱动调距丝杆401转动,能够使得调距层213的滑移更加省力且利于微小地调节调距层213的位置。
如图4、图6所示,调距驱动件403滑移连接于调中层212上,调距驱动件403包括联动所述调距丝杆401转动的调距联动位以及解除和调距丝杆401联动的调距断联位,调距驱动件403上连接有用于截止所述调向层214转动的第二截止件60;当所述调距丝杆401处于调距联动位时,第二截止件60接近所述调向层214,使得所述调向层214被限制转动;当所述调距丝杆401处于调距断联位时,第二截止件60远离所述调向层214,使得所述调向层214可以转动。
具体的,如图6、图8所示,调距驱动件403包括转动连接在调中层212侧壁上的调距驱动杆404、固定连接在调距驱动杆404端部的调距手轮405以及键连接在调距固定杆上的调距主动轮406,调距主动轮406是齿轮;调距丝杆401面向调距驱动件403的一侧穿出调中层212的侧壁,且在调距丝杆401穿出的一侧上固定连接有和调距主动轮406啮合的调距从动轮407。当调距驱动杆404向调中层212一侧滑移时,调距驱动杆404的键插入调距主动轮406中,调距驱动杆404可驱动调距主动轮406转动,第二截止件60接近调向层214,调距驱动件403处于调距联动位;当调距驱动杆404向远离调中层212一侧滑移时,调距驱动杆404的键从调距主动轮406中脱离,调距驱动杆404无法驱动调距主动轮406转动,第一截止件50远离调向层214,调距驱动件403处于调距断联位。
具体的,如图5所示,调向层214底部固定连接有架高盘216,使得调向层214和调距层213之间产生截止间隙,调向层214面向调距层213的端面构成刹车面,第一截止件50和第二截止件60可插入截止间隙的抵接刹车面。进一步的,为了提升第一截止件50和第二截止件60的截止调向层214转向的效果,刹车面可设置为有径向外侧至径向内侧倾斜且距离调距层213距离逐步减小的斜面。
具体的,如图5、图7所示,第一截止件50包括第一竖杆501、第一横杆502和第一刹车块503。第一竖杆501竖直设置,且第一竖杆501底部一侧滑移连接在运动层211上并与调中驱动杆304联动,能够随调中驱动杆304滑移而同步滑移,第一竖杆501的顶端至调向层214和调距层213之间调距间隙处的同一高度;第一横杆502的一端通过螺栓水平固定连接在第一竖杆501的顶端,第一横杆502的一端可伸入调向层214和调距层213之间调向层214和调距层213之间产生截止间隙;即当调中驱动件303处于调中联动位时,第一横杆502将伸入截止间隙中;当调中驱动件303处于调中断联位时,第一横杆502将从截止间隙中脱离。第一刹车块503可采用橡胶材质,第一刹车块503固定连接于第一横杆502面向调向层214一侧的上端面,用于和刹车面抵触,限制调向层214转动。
如图5、图8所示,第二截止件60和第一截止件50结构类似。第二截止件60包括第二竖杆601、第二横杆602和第二刹车块603。603第二竖杆601竖直设置,且第二竖杆601底部一侧滑移连接在调中层212上并与调距驱动杆404联动,能够随调距驱动杆404滑移而同步滑移,第二竖杆601的顶端至调向层214和调距层213之间调距间隙处的同一高度;第二横杆602的一端通过螺栓水平固定连接在第二竖杆601的顶端,第二横杆602的一端可伸入调向层214和调距层213之间调向层214和调距层213之间产生截止间隙;即当调距驱动件403处于调距联动位时,第二横杆602将伸入截止间隙中;当调距驱动件403处于调距断联位时,第二横杆602将从截止间隙中脱离。第二刹车块603可采用橡胶材质,第二刹车块603固定连接于第二横杆602面向调向层214一侧的上端面,用于和刹车面抵触,限制调向层214转动。
值得一提的是,本实施例中当调中驱动件303处于调中联动位时,第一竖杆501与调中层212之间至少具有20公分的间距,同时调中驱动件303的滑移距离为25公分;当调距驱动件403处于调距联动位时时,第二竖杆601与调距层213之间至少具有20公分的间距,同时调距驱动件403的滑移距离为25公分。因此在实际微调调中层212位置和调距层213位置的情况下,调中层212不会撞到第一竖杆501,调距层213也不会撞到第二竖杆601。
综上,在标靶和待校车辆3校准的过程中:
首先可以通过移动运动层211直至可动基座2整体置于待校车辆3的待位置校准的一侧,并使得两个定位校准辅助件4和两个可调校准辅助件5之间大致构成一个矩形。
之后将调中丝杆301移动至调中联动位,调距丝杆401移动至调距断联位;调距层213和调向层214被截止。之后转动调中丝杆301,使得主基体22平行于待校车辆3移动,直至车架中心线和几何中心线重合。
而后将调中丝杆301移动至调中断联位,调距丝杆401移动至调距断联位;调距层213和调中层212被截止。通过转动调向层214调节可动基座2相对于待校车辆3之间的角度,使得主基体22两侧相对的定位校准辅助件4和可调校准辅助件5之间的距离相等。
最后将调中丝杆301移动至调中断联位,调距丝杆401移动至调距联动位;调向层214和调中层212被截止。移动调距层213,调节主基体22和待校车辆3之间的距离,直至两侧相对的定位校准辅助件4和可调校准辅助件5之间的距离均等于预设测试距离;完成ADAS标靶的位置校正。
以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
- 一种车辆与ADAS传感器标靶的校准方法及可动基座
- 一种ADAS标靶调整方法、装置和车辆诊断设备