医用瓶盖内盖覆膜机
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及一种自动化设备,特别涉及一种医用瓶盖内盖覆膜机。
背景技术
医用瓶盖由外盖、内盖和胶塞组成,内盖上需要进行覆膜,将底膜密封、牢固的覆在内盖口上,实现对瓶内液体和胶塞的密封,目前内盖覆膜都是先采用冷裁切的方式对底膜进行裁切,裁切好的底膜圆片采用热压合治具热压合在内盖开口端面上即可,底膜边缘散在内盖外侧,且由于冷切割底膜,底膜上容易有粉尘和碎屑残留,易污染医用瓶内药液,且底膜边缘伸出内外外侧的散口很容易影响其与外盖的组装,以及因摩擦出现碎屑,且目前内盖覆膜都是有多个工序和多台简单治具组成,生产效率低,不良率高,容易混料,给医用瓶内药液使用安全埋下隐患。
发明内容
为了克服上述缺陷,本发明提供了一种医用瓶盖内盖覆膜机,该医用瓶盖内盖覆膜机能够全自动对医用瓶内盖进行高精度覆膜,覆膜位置准确,覆膜效率高,无碎屑污染医用瓶内药液。
本发明为了解决其技术问题所采用的技术方案是:一种医用瓶盖内盖覆膜机,包括机架、内盖上料装置、底膜上料盘、底膜收料盘、激光裁切装置、底膜支撑载具、第一转盘、第一转盘驱动装置、第一内盖载具、底膜取料机构、热压覆膜机构和控制系统,所述第一转盘能够间歇转动的安装于机架上,第一转盘驱动装置驱动第一转盘间歇旋转,至少一个第一内盖载具固定安装于第一转盘上,各个第一内盖载具均匀间隔的分布于第一转盘上同一圆环区域内,第一内盖载具能够在水平方向止动的定位内盖,内盖上料装置能够将内盖逐个放置于指定位置的第一内盖载具上定位,第一转盘能够带动第一内盖载具顺序到达底膜取料机构和热压覆膜机构的工作区域内;
底膜上料盘能够将底膜料带间歇的送至底膜支撑载具上,底膜支撑载具能够托持底膜料带并定位裁切下来的底膜;
激光裁切装置固定设于机架上,激光裁切装置能够对底膜支撑载具上的底膜料带进行裁切;
底膜收料盘能够将经过裁切的底膜废料进行收料;
底膜取料机构能够将底膜支撑载具上底膜移送至其工作区域内指定位置上的第一内盖载具上的内盖表面,底膜取料机构上还设有至少一个加热点,加热点能够发热,各个加热点能够紧抵接触内盖边缘的底膜表面;
热压覆膜机构包括固定于机架上的热压支架,热压支架上设有能够升降运动的热压头和热压驱动装置,所述热压头能够发热,热压驱动装置驱动热压头升降运动,热压头能够紧抵接触内盖边缘的底膜一圈表面;
控制系统控制内盖上料装置、底膜上料盘、底膜收料盘、激光裁切装置、第一转盘驱动装置、底膜取料机构、热压头和热压驱动装置运行。
作为本发明的进一步改进,所述内盖上料装置包括振动盘、出料通道、上料载具、上料夹爪、上料驱动装置、错位挡料块和错位驱动装置,所述上料载具固定安装于第一转盘外侧的机架上,上料载具上形成有与内盖外形匹配的料槽,该料槽侧壁上设有进料口,振动盘能够实现内盖有序排列输出,振动盘出料口通过出料通道与料槽的进料口连通,上料夹爪能够夹紧和松开内盖,上料驱动装置能够带动上料夹爪升降运动以及在料槽和指定位置的第一内盖载具之间往返运动,所述错位挡料块夹设于上料载具和出料通道出口之间,错位挡块能够沿垂直输送通道输送方向往复运动,错位挡块上设有一衔接通道,该衔接通道能够将出料通道的出料口和上料载具上料槽的进料口连通,该衔接通道内仅能够容纳一个内盖,该衔接通道随错位挡块运动能够与料槽进料口连通或与料槽进料口错位,错位驱动装置驱动错位挡料块往复运动,控制系统控制振动盘、上料夹爪、上料驱动装置和错位驱动装置运行。
作为本发明的进一步改进,所述上料载具能够沿垂直输送通道输送方向往复运动安装于机架上,上料载具上沿其运动方向间隔的设有两个料槽,第一内盖载具上也形成两个间隔设置且与内盖外形匹配的定位凹槽,还设有上料载具驱动装置,所述上料驱动装置包括上料固定架、第一升降滑块、第一水平滑块、第一升降驱动装置和第一水平驱动装置,所述第一水平滑块沿水平往复滑动的安装于上料固定架上,第一升降滑块沿纵向升降运动的安装于第一水平滑块上,第一升降驱动装置和第一水平驱动装置分别驱动第一升降滑块和第一水平滑块运动,所述上料载具上设有有料感应装置,有料感应装置能够感应到上料载具的料槽内上盖并传信于控制系统,控制系统控制第一升降驱动装置和第一水平驱动装置启停运动。
作为本发明的进一步改进,所述底膜支撑载具能够升降运动的安装于第一转盘外侧机架上,还设有底膜支撑驱动装置,底膜支撑驱动装置驱动底膜支撑载具往复升降运动,底膜支撑载具表面上设有负压气孔,负压气孔与负压提供装置连通,经激光裁切装置裁切下来的底膜能够止动的负压吸引于负压气孔上,控制系统控制负压提供装置启停。
作为本发明的进一步改进,所述底膜取料机构包括取料支架、负压吸头、第二升降滑块、第二水平滑块、第二升降驱动装置和第二水平驱动装置,所述第二水平滑块沿水平往复滑动的安装于取料支架上,第二升降滑块沿纵向升降运动的安装于第二水平滑块上,负压吸头固定安装于第二升降滑块上,负压吸头上形成有负压吸盘,至少一个加热点间隔的固定安装于负压吸头侧壁上,第二升降驱动装置和第二水平驱动装置分别驱动第二升降滑块和第二水平滑块运动,控制系统控制第二升降驱动装置、第二水平驱动装置和负压吸盘启停动作。
作为本发明的进一步改进,还设有热压修边机构,所述热压修边机构包括修边支架、修边支架上设有能够升降运动的热压修边头和修边驱动装置,所述热压修边头能够套设于位于其正下方的第一内盖载具上的内盖外侧,热压修边头内侧壁能够贴合于内盖圆周外侧,热压修边头内侧壁能够发热,修边驱动装置驱动热压修边头升降运动,控制系统控制热压修边头和修边驱动装置运行。
作为本发明的进一步改进,还设有气密性检测机构,所述气密性检测机构包括密封检测支架、第三升降滑块、第三升降驱动装置、密封头、弹性件、抽真空装置和真空度检测传感器,所述密封检测支架固定安装于第一转盘外侧的支架上,第三升降滑块沿纵向升降运动的安装于密封检测支架上,密封头纵向能够滑动设定距离的安装于第三升降滑块上,弹性件给密封头提供向下的弹性保持力,密封头内形成密封腔体,该密封腔体下侧底面上形成穿孔,穿孔内设有密封圈,所述密封圈能够紧密的套设于内盖圆周外侧,密封头下侧底面止挡于内盖上端的台阶面上,弹性件给密封头提供向下的弹性保持力,密封头的密封腔体内侧和内盖之间形成一个密封空间,密封头侧壁上设有抽气口,抽真空装置能够通过抽气口给密封腔体内抽真空,真空度检测传感器能够感应密封腔体内的真空度并传信于控制系统。
作为本发明的进一步改进,还设有第二转盘、第二转盘驱动装置、第二内盖载具、翻面搬运机构、外观检测机构、排料通道和不良品排料机构,第二转盘能够转动的安装于机架上,且第二转盘位于第一转盘一侧,第二转盘驱动装置驱动第二转盘旋转,至少一个第二内盖载具固定安装于第二转盘上,各个第二内盖载具均匀间隔的分布于第二转盘上同一圆环区域内,第二内盖载具能够在水平方向止动的定位内盖,翻面搬运机构包括翻面支架、摆臂、摆臂驱动装置、翻面夹爪和翻面夹紧驱动装置,翻面支架固定安装于机架上,翻面支架位于第一转盘和第二转盘之间,摆臂能够绕水平转轴转动的安装于翻面支架上,摆臂驱动装置驱动摆臂转动,翻面夹爪安装于摆臂端部,翻面夹紧驱动装置驱动翻面夹爪夹紧或松开内盖,外观检测机构包括检测支架和CCD成像装置,检测支架固定安装于第二转盘上,所述CCD成像装置固定安装于检测支架上,CCD成像装置能够对位于其正下方的第二内盖载具上的内盖成像,CCD成像装置传信于控制系统,排料通道固定安装于机架上,不良品排料机构包括排料支架、第三水平滑块、第四升降滑块、第三水平驱动装置、第四升降驱动装置、排料夹爪和排料夹紧驱动装置,所述排料支架固定安装于机架上,第三水平滑块沿水平方向滑动的安装于排料支架上,第四升降滑块能够沿纵向升降滑动的安装于第三水平滑块上,排料夹爪固定安装于第四升降滑块上,第三水平驱动装置、第四升降驱动装置和排料夹紧驱动装置分别驱动第三水平滑块和第四升降驱动装置和排料夹爪动作,控制系统控制第三水平驱动装置、第四升降驱动装置和排料夹紧驱动装置动作。
作为本发明的进一步改进,所述外观检测机构、排料通道和不良品排料机构均为两个,两个外观检测机构间隔的设于第二转盘外侧的支架上,两个排料通道间隔的固定安装于机架上,两个不良品排料机构间隔的设于第二转盘外侧的支架上,两个不良品排料机构分别能够将第二转盘上的第二内盖载具上的不良内盖送入两个排料通道内。
作为本发明的进一步改进,所述第一转盘上还能够沿第一转盘径向滑动的设有定位叉,所述定位叉能够紧密套设于内盖圆周外侧,第一转盘上还固定设有定位叉驱动装置,定位叉驱动装置驱动定位叉滑动,控制系统控制定位叉驱动装置运行。
本发明的有益效果是:本发明通过内盖上料装置实现了医用瓶内盖的全自动上料,且一次上两个内盖,实现两个内盖同步覆膜,采用激光实现底膜的热切割,切割后的底膜圆片尺寸精度高,无粉尘和碎屑,避免了底膜表面粘有碎屑污染医用瓶内药液,底膜通过热压贴合后,再通过加热使其伸出内盖边缘外侧部分的底膜去除,实现修边的效果,且修边的过程中也不会产生碎屑和粉尘,实现了内盖开口与底膜完美、牢固、精确的结合在一起,后续还通过气密性检测、外观检测等步骤实现底膜与内盖开口结合密封性和脏污等检测,确保底膜将内盖开口稳定密封,并确保内盖内部无任何污染物质,确保医用瓶使用安全性,本发明实现了医用瓶内盖的全自动贴膜,避免人工操作,贴膜效率高,贴膜位置精确、牢固,底膜裁切无粉尘和碎屑,医用瓶使用安全。
附图说明
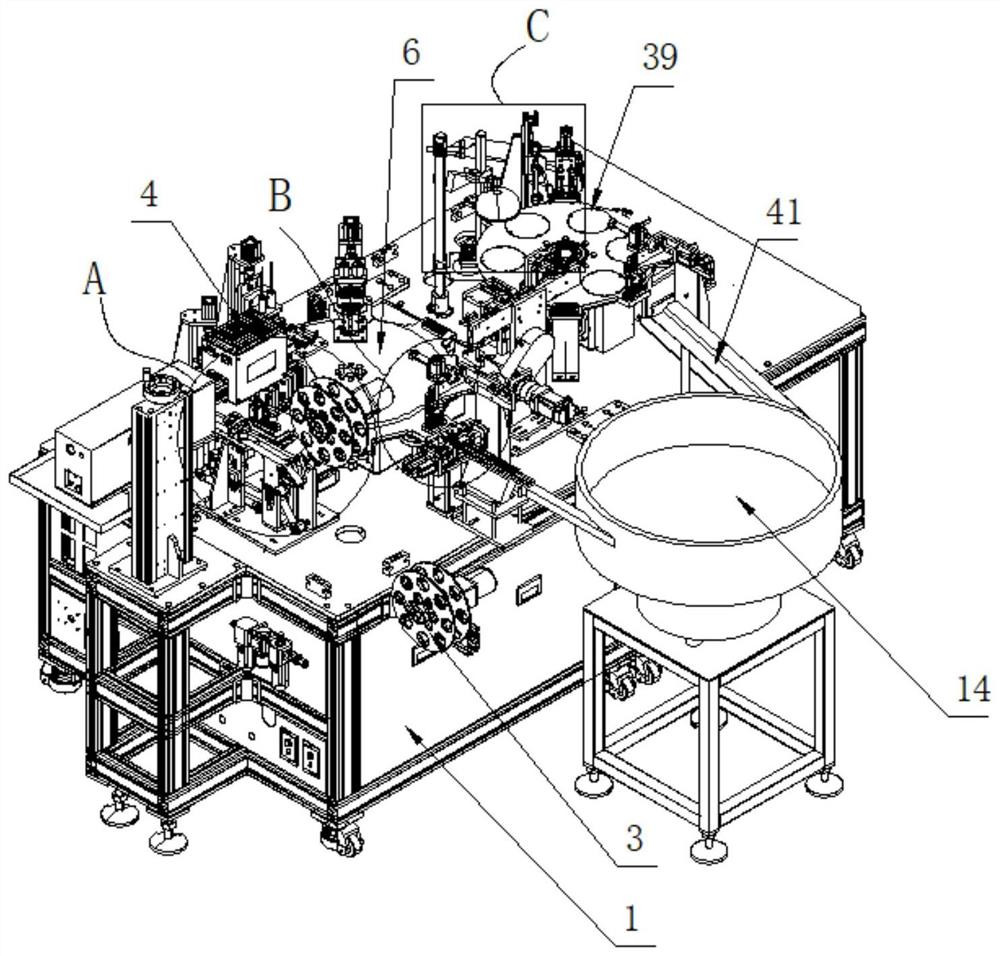
图1为本发明的第一立体图;
图2为图1中A部放大图;
图3为图1中B部放大图;
图4为图1中C部放大图;
图5为本发明的第二立体图;
图6为图5中D部放大图;
图7为图5中E部放大图;
图8为本发明的主视图;
图9为本发明的俯视图;
图10为本发明的右视图;
图11为翻面机构立体图;
图12为翻面机构主视图;
图13为翻面机构俯视图;
图14为翻面机构右视图。
具体实施方式
实施例:一种医用瓶盖内盖覆膜机,包括机架1、内盖上料装置、底膜上料盘2、底膜收料盘3、激光裁切装置4、底膜支撑载具5、第一转盘6、第一转盘驱动装置、第一内盖载具7、底膜取料机构、热压覆膜机构和控制系统,所述第一转盘6能够间歇转动的安装于机架1上,第一转盘驱动装置驱动第一转盘6间歇旋转,至少一个第一内盖载具7固定安装于第一转盘6上,各个第一内盖载具7均匀间隔的分布于第一转盘6上同一圆环区域内,第一内盖载具7能够在水平方向止动的定位内盖8,内盖上料装置能够将内盖逐个放置于指定位置的第一内盖载具7上定位,第一转盘6能够带动第一内盖载具7顺序到达底膜取料机构和热压覆膜机构的工作区域内;
底膜上料盘2能够将底膜料带9间歇的送至底膜支撑载具5上,底膜支撑载具5能够托持底膜料带9并定位裁切下来的底膜;
激光裁切装置4固定设于机架1上,激光裁切装置4能够对底膜支撑载具5上的底膜料带9进行裁切;
底膜收料盘3能够将经过裁切的底膜废料进行收料;
底膜取料机构能够将底膜支撑载具5上底膜移送至其工作区域内指定位置上的第一内盖载具7上的内盖表面,底膜取料机构上还设有至少一个加热点10,加热点10能够发热,各个加热点10能够紧抵接触内盖边缘的底膜表面;
热压覆膜机构包括固定于机架1上的热压支架11,热压支架11上设有能够升降运动的热压头12和热压驱动装置13,所述热压头12能够发热,热压驱动装置13驱动热压头12升降运动,热压头12能够紧抵接触内盖边缘的底膜一圈表面;
控制系统控制内盖上料装置、底膜上料盘2、底膜收料盘3、激光裁切装置4、第一转盘驱动装置、底膜取料机构、热压头12和热压驱动装置13运行。
医用瓶盖的内盖8由内盖上料装置逐个送到第一转盘6的第一内盖载具7上定位,第一转盘6定角度间歇转动,将内盖8逐渐的送到底膜取料机构和热压覆膜机构工作区域,底膜料带9由底膜上料盘2送料,由底膜收料盘3收料,底膜料带9经过底膜支撑载具5表面,底膜料带9由底膜支撑载具5托持,激光裁切装置4对底膜料带9进行激光切割形成圆形底膜,底膜取料机构将裁切下来的底膜送到其工作区域内指定位置上的第一内盖载具7上的内盖8表面上,底膜取料机构上的加热点10对底膜和内盖边缘进行多点加热点10焊连接,经过点焊底膜的内盖8随第一转盘6转动到达热压覆膜机构的工作区域,热压驱动装置13驱动热压头12下降抵压在底膜上侧表面上,将底膜与内盖上端面进行全面热压贴合牢固,该装置实现了医用瓶盖内盖8的全自动覆膜,底膜由激光进行热切割,避免了有粉尘和碎屑出现,进而避免了碎屑进入医用瓶内污染药剂,全自动覆膜,覆膜效率高,避免了人工操作,节省人工。
所述内盖上料装置包括振动盘14、出料通道15、上料载具16、上料夹爪17、上料驱动装置、错位挡料块18和错位驱动装置19,所述上料载具16固定安装于第一转盘6外侧的机架1上,上料载具16上形成有与内盖外形匹配的料槽,该料槽侧壁上设有进料口,振动盘14能够实现内盖有序排列输出,振动盘14出料口通过出料通道15与料槽的进料口连通,上料夹爪17能够夹紧和松开内盖,上料驱动装置能够带动上料夹爪17升降运动以及在料槽和指定位置的第一内盖载具7之间往返运动,所述错位挡料块18夹设于上料载具16和出料通道15出口之间,错位挡块能够沿垂直输送通道输送方向往复运动,错位挡块上设有一衔接通道,该衔接通道能够将出料通道15的出料口和上料载具16上料槽的进料口连通,该衔接通道内仅能够容纳一个内盖,该衔接通道随错位挡块运动能够与料槽进料口连通或与料槽进料口错位,错位驱动装置19驱动错位挡料块18往复运动,控制系统控制振动盘14、上料夹爪17、上料驱动装置和错位驱动装置19运行。内盖由振动盘14进行排料和上料,内盖从出料通道15经错位挡料块18的衔接通道上进入上料载具16的料槽内,通过错位挡料块18左右滑动与上料槽进料口正对或错位实现进料和挡料,然后通过上料夹爪17将上料载具16的料槽内的内盖送到第一转盘6上内盖载具内定位,该种上料结构上料效率高,除了采用该种上料方式外,还可以采用人工上料,料仓上料等上料方式,此为本领域技术人员根据本专利很容易想到的等同替换结构。
所述上料载具16能够沿垂直输送通道输送方向往复运动安装于机架1上,上料载具16上沿其运动方向间隔的设有两个料槽,第一内盖载具7上也形成两个间隔设置且与内盖外形匹配的定位凹槽,还设有上料载具驱动装置58,所述上料驱动装置包括上料固定架20、第一升降滑块21、第一水平滑块22、第一升降驱动装置23和第一水平驱动装置24,所述第一水平滑块22沿水平往复滑动的安装于上料固定架20上,第一升降滑块21沿纵向升降运动的安装于第一水平滑块22上,第一升降驱动装置23和第一水平驱动装置24分别驱动第一升降滑块21和第一水平滑块22运动,所述上料载具16上设有有料感应装置,有料感应装置能够感应到上料载具16的料槽内上盖并传信于控制系统,控制系统控制第一升降驱动装置23和第一水平驱动装置24启停运动。
该机构能够实现两个内盖上料,在覆膜和热压合工序可以实现两个内盖同步进行,有利于内盖覆膜效率。
所述底膜支撑载具5能够升降运动的安装于第一转盘6外侧机架1上,还设有底膜支撑驱动装置,底膜支撑驱动装置驱动底膜支撑载具5往复升降运动,底膜支撑载具5表面上设有负压气孔,负压气孔与负压提供装置连通,经激光裁切装置4裁切下来的底膜能够止动的负压吸引于负压气孔上,控制系统控制负压提供装置启停。在底膜支撑载具5上设置负压气孔底膜料带9由负压气孔进行负压吸引,然后再进行激光裁切,裁切后的底膜保持稳定的负压吸引定位,待底膜取料机构抓取底膜时,负压气孔松开底膜,由底膜取料机构将底膜取走,该结构能够确保底膜位置准确,确保其能够精确的覆在内盖表面,并与内盖通心定位。
所述底膜取料机构包括取料支架25、负压吸头26、第二升降滑块27、第二水平滑块28、第二升降驱动装置29和第二水平驱动装置30,所述第二水平滑块28沿水平往复滑动的安装于取料支架25上,第二升降滑块27沿纵向升降运动的安装于第二水平滑块28上,负压吸头26固定安装于第二升降滑块27上,负压吸头26上形成有负压吸盘,至少一个加热点10间隔的固定安装于负压吸头26侧壁上,第二升降驱动装置29和第二水平驱动装置30分别驱动第二升降滑块27和第二水平滑块28运动,控制系统控制第二升降驱动装置29、第二水平驱动装置30和负压吸盘启停动作。
通过负压吸头26对底膜进行负压吸引定位取放料,在负压吸头26侧壁上设置加热点10,实现将底膜覆盖在内盖表面的同时,将底膜与内盖边缘进行多点加热点10焊,确保内盖与底膜保持稳定的连接状态,避免搬运过程中底膜移位。
还设有热压修边机构,所述热压修边机构包括修边支架31、修边支架31上设有能够升降运动的热压修边头32和修边驱动装置33,所述热压修边头32能够套设于位于其正下方的第一内盖载具7上的内盖外侧,热压修边头32内侧壁能够贴合于内盖圆周外侧,热压修边头32内侧壁能够发热,修边驱动装置33驱动热压修边头32升降运动,控制系统控制热压修边头32和修边驱动装置33运行。底膜在激光裁切时,底膜直径大于内盖上端外径,确保热压合时全面压合定位,伸出到内盖圆周外侧的底膜边缘,由热压修边机构的热压修边头32加热,是的底膜边缘紧贴在内盖上,实现底膜修边。
还设有气密性检测机构,所述气密性检测机构包括密封检测支架4734、第三升降滑块35、第三升降驱动装置36、密封头37、弹性件38、抽真空装置和真空度检测传感器,所述密封检测支架4734固定安装于第一转盘6外侧的支架上,第三升降滑块35沿纵向升降运动的安装于密封检测支架4734上,密封头37纵向能够滑动设定距离的安装于第三升降滑块35上,弹性件38给密封头37提供向下的弹性保持力,密封头37内形成密封腔体,该密封腔体下侧底面上形成穿孔,穿孔内设有密封圈,所述密封圈能够紧密的套设于内盖圆周外侧,密封头37下侧底面止挡于内盖上端的台阶面上,弹性件38给密封头37提供向下的弹性保持力,密封头37的密封腔体内侧和内盖之间形成一个密封空间,密封头37侧壁上设有抽气口,抽真空装置能够通过抽气口给密封腔体内抽真空,真空度检测传感器能够感应密封腔体内的真空度并传信于控制系统。热压覆膜后的内盖到达气密性检测机构位置处后,密封头37套设在内盖外侧,密封头37通过密封圈与内盖之间形成一个密封腔,通过抽真空装置对密封腔进行抽真空,由真空度检测传感器感应密封腔内真空度,进而判断底膜与内盖之间热压合情况,确保底膜与内盖之间保持密封覆合,避免医用瓶在使用过程中稳定的密封装置,避免漏液。
还设有第二转盘39、第二转盘驱动装置、第二内盖载具40、翻面搬运机构、外观检测机构、排料通道41和不良品排料机构,第二转盘39能够转动的安装于机架1上,且第二转盘39位于第一转盘6一侧,第二转盘驱动装置驱动第二转盘39旋转,至少一个第二内盖载具40固定安装于第二转盘39上,各个第二内盖载具40均匀间隔的分布于第二转盘39上同一圆环区域内,第二内盖载具40能够在水平方向止动的定位内盖,翻面搬运机构包括翻面支架42、摆臂43、摆臂驱动装置44、翻面夹爪45和翻面夹紧驱动装置46,翻面支架42固定安装于机架1上,翻面支架42位于第一转盘6和第二转盘39之间,摆臂43能够绕水平转轴转动的安装于翻面支架42上,摆臂驱动装置44驱动摆臂43转动,翻面夹爪45安装于摆臂43端部,翻面夹紧驱动装置46驱动翻面夹爪45夹紧或松开内盖,外观检测机构包括检测支架47和CCD成像装置48,检测支架47固定安装于第二转盘39上,所述CCD成像装置48固定安装于检测支架47上,CCD成像装置48能够对位于其正下方的第二内盖载具40上的内盖成像,CCD成像装置48传信于控制系统,排料通道41固定安装于机架1上,不良品排料机构包括排料支架49、第三水平滑块50、第四升降滑块51、第三水平驱动装置52、第四升降驱动装置53、排料夹爪54和排料夹紧驱动装置55,所述排料支架49固定安装于机架1上,第三水平滑块50沿水平方向滑动的安装于排料支架49上,第四升降滑块51能够沿纵向升降滑动的安装于第三水平滑块50上,排料夹爪54固定安装于第四升降滑块51上,第三水平驱动装置52、第四升降驱动装置53和排料夹紧驱动装置55分别驱动第三水平滑块50和第四升降驱动装置53和排料夹爪54动作,控制系统控制第三水平驱动装置52、第四升降驱动装置53和排料夹紧驱动装置55动作。
通过翻面搬运机构将第一转盘6的第一内盖载具7上的内盖夹紧后翻转180度并放到第二转盘39的第二内盖载具40上定位,第二转盘39等角度间歇转动,将翻面后的内盖送到外观检测机构处,由CCD成像装置48对内盖内侧进行成像,进而对底膜和内盖内侧进行外观检测,经检测后不合格的,由不良品排料机构送到排料通道41内,不良品由排料通道41进行排料收集,避免其与合格品混料,翻面机构上还设置相互垂直的水平导轨59和竖直导轨60,摆臂43端部与沿竖直滑动安装于竖直导轨上的竖直滑块连接,竖直导轨与沿水平导轨滑动的水平滑块连接,这样摆臂43、竖直导轨和水平导轨之间形成一个平行四边形结构,实现对摆臂43摆动的支撑和导向,确保翻面位置准确。
所述外观检测机构、排料通道41和不良品排料机构均为两个,两个外观检测机构间隔的设于第二转盘39外侧的支架上,两个排料通道41间隔的固定安装于机架1上,两个不良品排料机构间隔的设于第二转盘39外侧的支架上,两个不良品排料机构分别能够将第二转盘39上的第二内盖载具40上的不良内盖送入两个排料通道41内。由两个外观检测机构分别对内盖上底膜内侧面进行成像检测,一个用于检测底膜内侧面是否干净,另一个检测内盖内侧面上是否有黑点,合格的流入下一工序,不合格的由不良品排料机构排出,采用两个不良品排料机构进行排料,避免一个不良品排料机构没有将不良品排除干净,实现清空第二内盖载具40的作用,确保合格内盖中没有不良品混入。
所述第一转盘6上还能够沿第一转盘6径向滑动的设有定位叉56,所述定位叉56能够紧密套设于内盖圆周外侧,第一转盘6上还固定设有定位叉驱动装置57,定位叉驱动装置57驱动定位叉56滑动,控制系统控制定位叉驱动装置57运行。定位叉56在内盖进行覆膜、热压合、修边以及真空度检测过程中保持稳定的位置,避免其发生晃动影响覆膜和检测。
- 医用瓶盖内盖覆膜机
- 一种医用试剂瓶盖的多功能开盖器