钻孔导向器
文献发布时间:2023-06-19 11:35:49
相关申请的交叉引用
本申请要求于2018年11月16日提交并题为“Foot&Ankle–Hand&Wrist DrillGuide”的美国临时专利申请序列号62/768,299。
背景技术
1.
本发明通常涉及外科工具和器械,并且更具体地涉及用于精确钻孔和导丝放置的多轴钻孔导向器组件。
2.
在整形外科手术期间,常常在骨头中钻孔。在某些手术中,使用钻孔导向器排齐钻头,以确保钻孔隧道处于适当的位置。许多待钻孔的骨表面具有严重的轮廓,每个患者的轮廓各不相同。由于轮廓,可能难以将钻孔导向器适当地靠在骨骼上。当在ACL重建期间使用钻孔导向器协助钻通胫骨隧道时,尤其如此。
许多常规钻孔导向器组件与导向臂和钻孔导向套筒结合使用。常规钻孔导向器组件还需要螺纹机构以防止导向臂从钻孔导向器组件中掉出。此外,许多传统的钻孔导向套筒具有固定的几何形状。这些套筒被锤入骨中,这可能导致未对准。
因此,需要一种具有多于一种类型的特征的钻孔导向器,以用于将钻孔导向器相对于骨头和钻孔导向臂固定到适当位置,所述钻孔导向臂为钻头放置提供何种各样的角度。
相关技术章节免责声明描述:就以上在相关技术章节描述或本公开的其他地方讨论的具体专利/公布/产品而言,这些讨论不应被认为是承认所讨论的专利/公布/产品是出于专利法目的的现有技术。例如,所讨论的专利/公布/产品中的一些或所有可能在时间上不够早,可能没有反映在时间上足够早地发展的主题和/或可能不足以实现等同于专利法目的的现有技术。就以上在相关技术章节描述和/或整个申请中讨论的具体专利/公布/产品而言,其描述/公开内容均以引用方式以其各自的整体并入本文。
发明内容
本发明的实施方案涉及一种用于精确钻孔和导丝放置的多轴钻孔导向器组件。根据一个方面,所述钻孔导向器组件包括导向臂,所述导向臂具有第一端部和第二端部以及从所述第一端部朝向所述第二端部延伸的弯曲狭槽。所述钻孔导向器组件还包括具有第一端部和第二端部的弯曲导向延伸臂。所述弯曲导向延伸臂的所述第一端部可在所述导向臂的所述弯曲狭槽内滑动。所述钻孔导向器组件另外具有探头臂,所述探头臂可旋转地连接到所述导向臂的所述第二端部。所述探头臂可旋转到相对于所述导向臂非平面的位置。
根据另一个方面,所述钻孔导向器组件包括导向臂,所述导向臂具有第一端部和第二端部以及从所述第一端部朝向所述第二端部延伸的弯曲狭槽。所述钻孔导向器组件还包括具有第一端部和第二端部的弯曲导向延伸臂。所述弯曲导向延伸臂的所述第一端部可在所述导向臂的所述弯曲狭槽内滑动。所述钻孔导向器组件另外具有附接到所述弯曲导向延伸臂的所述第二端部的钻孔导向器。所述钻孔导向器沿第一轴线延伸。所述钻孔导向器组件还包括具有第一端部和第二端部的探头臂。所述探头臂的所述第一端部可旋转地连接到所述导向臂的所述第二端部。所述探头臂可朝向所述弯曲导向延伸臂旋转。探头附接到所述探头臂的所述第二端部,并且所述探头沿第二轴线延伸。在第一构造中,所述第一轴线相对于所述第二轴线成第一角度,并且在第二构造中,所述第一轴线相对于所述第二轴线成第二角度。所述第一角度与所述第二角度不同。
根据又一个方面,所述钻孔导向器组件包括导向臂,所述导向臂具有第一端部和第二端部以及从所述第一端部朝向所述第二端部延伸的弯曲狭槽。所述钻孔导向器组件还包括具有第一端部和第二端部的弯曲导向延伸臂。所述弯曲导向延伸臂的所述第一端部可在所述导向臂的所述弯曲狭槽内滑动。所述钻孔导向器组件具有探头臂,所述探头臂具有第一端部和第二端部。所述探头臂的所述第一端部可旋转地连接到所述导向臂的所述第二端部。锥形探头附接到所述探头臂的所述第二端部。
参考下文描述的实施方案,本发明的这些和其他方面将变得显而易见并得到阐明。
附图说明
本发明的一个或多个方面作为示例在说明书结论处的权利要求中被特别指出并清楚地要求保护。通过以下结合附图的描述,本发明的前述和其他目的、特征和优点将变得显而易见,其中:
图1是根据一个实施方案的钻孔导向器组件的侧视立体示意图;
图2是根据一个实施方案的探头组件的探头的侧视立体示意图;
图3是根据一个实施方案的钻孔导向器组件的俯视立体示意图;
图4是根据一个实施方案的枢轴锁定螺钉的侧视立体示意图;
图5是根据一个实施方案的第一构造中的钻孔导向器组件的侧视立体示意图;
图6是根据一个实施方案的第二构造中的钻孔导向器组件的侧视立体示意图;并且
图7是根据一个实施方案的钻孔导向器的特写透视示意图。
具体实施方式
下面参考附图中所示的非限制性示例更全面地解释本发明的各方面及其某些特征、优点和细节。省略了对公知结构的描述,以免不必要地使本发明在细节上变得模糊。然而,应当理解,详细描述和具体的非限制性示例虽然指示了本发明的方面,但仅以说明的方式给出,而不是以限制的方式给出。根据本公开,在本发明的基本概念的精神和/或范围内的各种替换、修改、添加和/或布置对于本领域技术人员而言将是显而易见的。
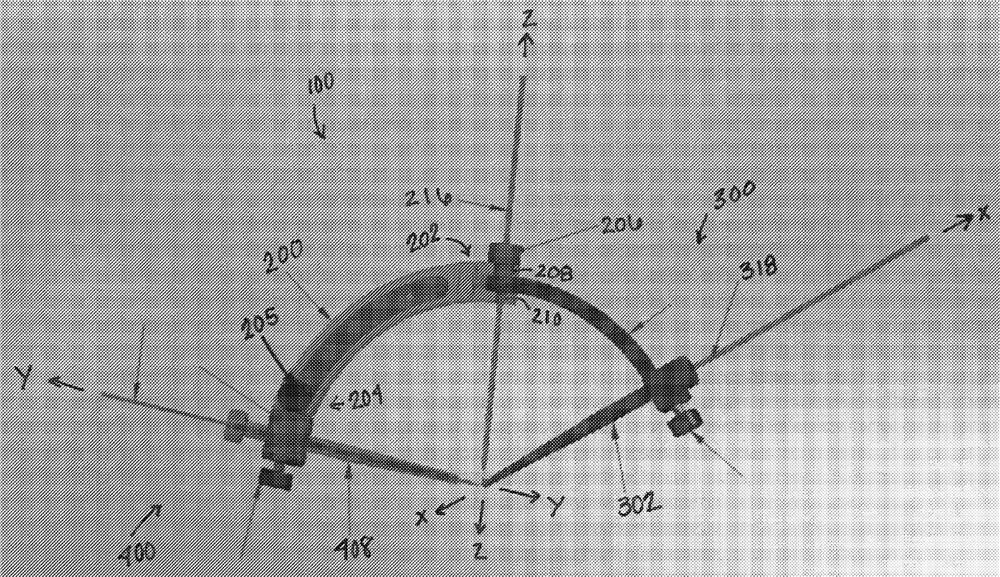
现在参考附图,其中相同的附图标号始终指代相同的部分,图1示出了根据一个实施方案的钻孔导向器组件100的侧视立体示意图。钻孔导向器组件100包括弯曲(curved或bent)导向臂200。导向臂200具有连接到探头组件300的第一端部202和连接到钻孔导向器子组件400的第二端部204。探头组件300包括沿纵向第一轴线x–x延伸的探头302。钻孔导向器408连接到钻孔导向器子组件400并沿第二轴线y–y延伸,所述第二轴线y–y相对于所描绘的实施方案中的第一轴线x–x是横向的。
现在转到图2,示出了根据一个实施方案的探头组件300的探头302的立体示意图。探头302包括具有第一端部306和第二端部308的细长轴304。在所描绘的实施方案中,探头302是锥形的,其直径从第一端部306向第二端部308减小。探头302的第一端部306包括用于保持探头302的定位的凸边圆柱形盖310,如下文详细描述。探头302的第二端部308是圆形的。在所描绘的实施方案中,探头302的第二端部308是球形的。探头302的圆形或球形第二端部308保护任何关节面,同时前进到关节中的期望位置。
仍然参考图2,圆形或球形第二端部308包括具有圆周的外表面312。长钉314从圆形或球形第二端部308的外表面312延伸。如图2所示,长钉314延伸到点316。长钉314相对于第一轴线x–x(通过探头302)成一定角度延伸。在所描绘的实施方案中,长钉314相对于第一轴线x–x大约或等于90度(即,基本上垂直)。如下所述,长钉314用于夹持骨头,同时还为钻销位置提供目标。在一个实施方案中,探头302是空心的,使得第一端部306和第二端部308是敞开的,从而允许第一导丝318(图1)通过探头302以进一步固定钻孔导向器408的位置。
参考图3,示出了根据一个实施方案的钻孔导向器组件100的俯视立体示意图。探头302通过探头臂320连接到导向臂200。在所描绘的实施方案中,探头臂320以类似于导向臂200的方式弯曲(curved或bent)。探头臂320包括第一端部322和第二端部324。第一端部322连接到导向臂200,如下文详细描述。第二端部324连接到探头302。
探头臂320的第二端部324包括沿第一轴线x–x延伸穿过其中的通道326。通道326的尺寸和构造被设置成适应探头302进出通道326的移动。探头302的盖310用作止动件并防止探头302完全通过通道326滑动。在所描绘的实施方案中,探头臂320的第二端部324是立方体的或者是矩形的。尽管第二端部324可以具有其他几何形状,但是第二端部324的立方体或矩形形状容纳锁定机构328。
在图3所示的实施方案中,锁定机构328是锁定螺钉。当探头302处于期望位置(即,处于通道326内的特定深度)时,锁定螺钉328延伸到第二端部324中的通道326中。在所描绘的实施方案中,锁定螺钉328横向于第一轴x–x。具体来说,锁定螺钉328沿基本垂直于第一轴x–x的方向或轴线延伸。为了将探头302固定在通道326内,锁定螺钉328拧紧在通道326内的探头302上。
如上所述,探头臂320的第一端部322连接到导向臂200。特别地,探头臂320的第一端部322通过可枢转连接器206可旋转地附接到导向臂200。可枢转连接器206是图3所示的实施方案中的枢轴锁定螺钉。枢轴锁定螺钉206延伸到导向臂200的第一端部202中,如图1所示。探头臂320优选地可围绕枢轴锁定螺钉206旋转多达总共240度。然而,根据替代实施方案,探头臂320可围绕枢轴锁定螺钉206旋转超过总共转240度(例如,在某些实施方案中高达和超过360度),如本领域普通技术人员结合对本公开的综述应理解。
现在转到图4,示出了根据一个实施方案的枢轴锁定螺钉206的侧视立体示意图。枢轴锁定螺钉206包括连接到螺纹210的第一圆柱形部分208(具有第一直径),其中一个或多个附加的圆柱形部分212A、212B附接于其间。在所描绘的实施方案中,枢轴锁定螺钉206具有:具有第一直径的第一圆柱形部分208,其连接到具有第二直径的第二圆柱形部分212A;第二圆柱形部分212A,其连接到具有第三直径的第三圆柱形部分212B;以及第三圆柱形部分212B,其连接到螺纹210。在一个实施方案中,第一直径大于第二直径,第二直径大于第三直径,并且螺纹210的直径小于第三直径。
在使用中,探头臂320的第一端部322围绕附加圆柱形部分212A、212B中的至少一个延伸,而螺纹210被拧入导向臂200中,并且导向臂200的一部分围绕第一圆柱形部分208(图1)延伸。在图4所示的实施方案中,枢轴锁定螺钉206是空心的,从而通过第一圆柱形部分308、附加圆柱形部分212A、212B和螺纹210提供延伸穿过枢轴锁定螺钉206的通道214,以用于放置第二导丝216(图1和图3)。第二导丝216沿着不同于第一轴线x–x和第二轴线y–y的第三轴线z–z延伸。
仍然参考图4,枢轴锁定螺钉206用于连接探头臂320和导向臂200。枢轴锁定螺钉206还可用于在获得期望角度之后将探头臂320锁定在适当位置。如上所述,枢轴锁定螺钉206穿过导向臂200的第一端部202然后穿过探头臂320。通过将螺纹210拧入钻孔导向臂200的第一端部202来固定枢轴锁定螺钉206。通过沿顺时针方向拧紧枢轴锁定螺钉206来实现锁定动作,使导向臂200压缩探头臂320。
图5和图6分别示出了第一构造和第二构造中的钻孔导向器组件100的侧视透视示意图。导向臂200包括沿导向臂200的长度延伸的弯曲(curved或bent)狭槽218。特别地,狭槽218开始于导向臂200的第二端部204并朝向导向臂200的第一端部202延伸。弯曲(curved或bent)狭槽218的尺寸和构造被设置成可滑动地容纳钻孔导向器子组件400的钻孔导向延伸臂402。因此,钻孔导向延伸臂402弯曲(curved或bent)以装配在钻孔导向臂200中的狭槽218内。在其第一端部404处,钻孔导向延伸臂402可在钻孔导向臂200中的狭槽218内自由滑动,而其第二端部406连接到钻孔导向器408。
导向臂200包括连接器205(例如,锁定螺钉),以将钻孔导向延伸臂402固定(secure或fix)在狭槽218内的适当位置。如图1和图3所示,连接器205延伸到导向臂200的第二端部204中。连接器205相对于第二导丝216成一定角度锁定钻孔导向器408。换句话说,连接器205相对于第三轴线z–z成一定角度锁定第一轴线x–x。
简要地转到图7,示出了根据一个实施方案的钻孔导向器408的特写透视示意图。在所描绘的实施方案中,钻孔导向延伸臂402的第二端部406是立方体的或者矩形的,以容纳连接器410。在所描绘的实施方案中,连接器410是锁定螺钉,其相对于第二轴线y–y成一定角度延伸到钻孔导向延伸臂402的第二端部406中。具体来说,锁定螺钉410沿基本垂直于第二轴线y–y的方向或轴线延伸。
仍然参考图7,钻孔导向器408具有连接到圆柱形盖414的锥形细长轴412。在一个实施方案中,钻孔导向器408是空心的,使得可以通过盖414和细长轴412中的通道418插入钻销416。在一个实例实施方案中,钻孔导向器408是空心的以容纳.072直径的钻孔导向器416(但是可以使用其他尺寸的钻销,如本领域普通技术人员结合对本公开的综述所应理解和领会)。盖414的外径大于通道418的内径,使得盖414防止钻孔导向器408完全通过通道418滑动并进入手术部位。
同样如图7所示,钻孔导向器408的细长轴412包括在自由端422处的冠部420。通常,冠部420是一个或多个在钻孔导向器408的自由端422处的锯齿状或其他锋利边缘。在使用中,首先将探头302放置在期望位置,然后使钻孔导向器408前进,直到冠部420与骨头接触。此后,然后将锁定螺钉410拧紧以将钻孔导向器408固定在适当位置。
再次参考图5,在第一构造中,钻孔导向延伸臂402处于导向臂200中的狭槽218内的第一位置。当钻孔导向延伸臂402处于第一位置时,钻孔导向器408相对于探头302成第一角度。换句话讲,第一轴线x–x相对于第二轴线y–y成第一角度。移动到图6所示的第二构造,钻孔导向延伸臂402在狭槽218内(至少部分地)移动到第二位置。在第二位置,钻孔导向器408相对于探头302成第二角度。如下所示,第一轴线x–x对于第二轴线y–y成第二角度。第一角度与第二角度不同。在所描绘的实施方案中,第二角度大于第一角度。在一些情况下,第一轴线x–x相对于第二轴线y–y横向,尽管第一轴线x–x和第二轴线y–y可能是相同的轴线。
仍然参考图5和图6,在第一构造和第二构造两者中,探头302和钻孔导向器408在钻孔空间102处相遇或朝向钻孔空间102延伸。在所描绘的实施方案中,第二导丝216延伸穿过枢轴锁定螺钉206并且也在钻孔空间102处相遇或朝向钻孔空间102延伸。延伸通过探头302的第一导丝318也在钻孔空间102处相遇或朝向钻孔空间102延伸。第一导丝216和第二导丝318可选地用于进一步固定钻孔导向器408的位置。上面参考图5和图6描述的移动是钻孔导向器408在一个平面内的移动,以实现第一构造和第二构造。通过围绕枢轴锁定螺钉206朝向钻孔导向器子组件400旋转探头臂320,可以实现第三构造,如图3所示。
在图5和图6中,钻孔导向器组件100基本上是平面的,这意味着钻孔导向臂200在与钻孔导向器408(以及钻孔导向延伸臂402)和探头302(以及探头臂320)大致相同的平面内延伸。在第三构造中,探头臂320围绕枢轴锁定螺钉206和第三轴线z–z旋转,使得探头302和探头臂320不再与钻孔导向臂200和钻孔导向器408(以及钻孔导向延伸臂402)基本上平面,如图3所示。然而,尽管将探头302和探头臂320旋转到另一个平面中,但是探头302仍然与钻孔导向器408在钻孔空间102处相遇或延伸到钻孔空间102。在图3所示的实施方案中,第二导丝318延伸穿过枢轴锁定螺钉206,并且也与探头302和钻孔导向器408在钻孔空间102处相遇或延伸到钻孔空间102。因此,在第一构造、第二构造和第三构造中,探头302(以及第一导丝318)和钻孔导向器408(以及钻销416),以及在一些情况下,第二导丝216,全部会聚在钻孔空间102处。
如本文所定义和使用的所有定义应被理解为优先于字典定义、以引用方式并入的文档中的定义和/或所定义术语的普通含义。
尽管已经在本文中描述和示出了各种实施方案,但本领域的普通技术人员将容易设想到用于执行功能和/或获得结果和/或本文所述的优点中的一个或多个的各种其他装置和/或结构,并且此类变型和/或修改中的每一个都被认为在本文所述的实施方案的范围内。更一般地,本领域技术人员将容易地理解,本文所述的所有参数、尺寸、材料和构型均是示例性的,并且实际参数、尺寸、材料和/或构型将取决于本发明的教导内容用于其的一个或多个特定应用。仅使用常规实验,本领域技术人员将认识到或能够确定本文所述的特定实施方案的许多等同形式。因此,应当理解,前述实施方案仅通过示例给出,并且在所附权利要求及其等同形式的范围内,可以不同于具体描述和受权利要求保护的方式来实践实施方案。本公开的实施方案涉及本文所述的每个单独的特征、系统、制品、材料、套件和/或方法。此外,如果这些特征、系统、制品、材料、套件和/或方法不是相互矛盾的,则两个或更多个这样的特征、系统、制品、材料、套件和/或方法的任何组合也包括在本公开的范围内。
本文所用的术语仅用于描述特定实施方案的目的,并且并非旨在对本发明进行限制。如本文所用,除非上下文另有明确指示,否则单数形式“一个”、“一种”和“该”也旨在包括复数形式。还应当理解,术语“包括(comprise)”(以及“包括(comprise)”的任何形式,诸如“包括(comprises)”和“包括(comprising)”)、“具有(have)”(以及“具有(have)”的任何形式,诸如“具有(has)”和“具有(having)”)、“包含(include)”(以及“包含(include)”的任何形式,诸如“包含(includes)”和“包含(including)”)、以及“含有(contain)”(以及“含有(contain)”的任何形式,诸如“含有(contains)”和“含有(containing)”)为开放式系动词。因此,"包括"、"具有"、"包含"或"含有"一个或多个步骤或元件的方法或装置。同样,“包括”、“具有”、“包含”或“含有”一个或多个特征的方法的步骤或装置的元件具有那些一个或多个特征,但不限于仅具有那些一个或多个特征。此外,以某种方式构造的装置或结构至少以该方式构造,但是也可以以未列出的方式构造。
以下权利要求中的所有装置或步骤加上功能元件的对应结构、材料、操作和等同物,如果有的话,旨在包括用于与如具体要求保护的其他要求保护的元件组合地执行功能的任何结构、材料或操作。已经出于说明和描述的目的给出了本发明的描述,但是该描述不是穷举的或者将本发明限制为所公开的形式。在不脱离本发明的范围和精神的情况下,许多修改和变化对于本领域的普通技术人员而言将是显而易见的。选择和描述实施方案是为了最好地解释本发明的一个或多个方面的原理和实际应用,并使本领域的其他普通技术人员能够理解本发明的一个或多个方面,以用于具有适合于所设想的特定用途的各种修改的各种实施方案。
- 用于伸缩给送器的结合有导向柱的第一和第二横梁;伸缩给送器;用于凿孔的钻孔装置和使用导向柱的方法
- 用于连续导向钻孔的一体式发送器测量和钻孔同步进行(SWB)的挖壕动力装置