一种交通事故碰撞前车辆行驶轨迹计算方法及系统
文献发布时间:2023-06-19 11:35:49
技术领域
本发明涉及车辆轨迹计算领域,特别是涉及一种交通事故碰撞前车辆行驶轨迹计算方法及系统。
背景技术
交通事故发生后,交警通过事故现场勘察、事故形态分析等流程最终还原事故发生过程,而后出具交通事故责任认定书。事故发生前车辆是否违规变道或占道是影响事故主次责任划分的重要依据之一,因此有必要对碰撞前车辆的行驶轨迹进行还原。
目前国内外相关研究多集中于碰撞后车辆运行轨迹的分析,主要是基于PC-crash等动力学模拟仿真软件的再现方法。事故重建主要根据交通事故现场特征,如碰撞后车辆位移、损坏程度、拖痕长度、路面情况等,运用力学动量守恒与能量守恒的基本理论,对事故发生过程进行推理与验证。但车辆发生碰撞前,没有与其他车辆发生动量和能量交换,因此碰撞前车辆行驶轨迹无法有效模拟。
目前车辆行驶轨迹的确定通常是基于监控视频的还原方法,对无监控录像的事故地点,也可以根据路面制动痕迹进行判断,但现在车辆普遍配备了ABS(车辆防抱死系统),紧急制动时轮胎以边滚动边滑动的方式前进,路面制动痕迹通常不明显,也容易受到其他车辆痕迹或者现场勘察人员的破坏,另外制动痕迹还原法也不适用于碰撞前未采取制动措施的事故。
此外,现有技术中还原碰撞前车辆行驶轨迹的方法还包括基于定位系统的车辆轨迹还原方法和基于RFID定位技术的还原方法。基于定位系统的车辆轨迹还原方法为利用车载GPS、北斗等定位系统确定车辆在路面上的位置。但缺点一是定位系统信号采样频率较低(通常每5秒记录1次位置信息),而碰撞通常发生在极短的时间内,还原轨迹不准确。二是目前定位系统本身的误差大,存在定位偏移,尤其是在隧道,高架桥等位置。三是非营运车辆普遍没有配置定位系统,适用范围有限。RFID定位技术的还原方法是将车载射频卡安装在车辆上,射频卡内部存储车辆信息,由安装在路侧的射频卡读卡器读取车辆位置信息,相比GPS定位精度高,但成本也高,无法大批量安装。GPS定位精度低,RFID成本高,且两种方式均需要在车内安装相关设备,仅适用于营运车辆,适用范围有限。
发明内容
本发明旨在至少解决现有技术中存在的技术问题,特别创新地提出了一种交通事故碰撞前车辆行驶轨迹计算方法及系统。
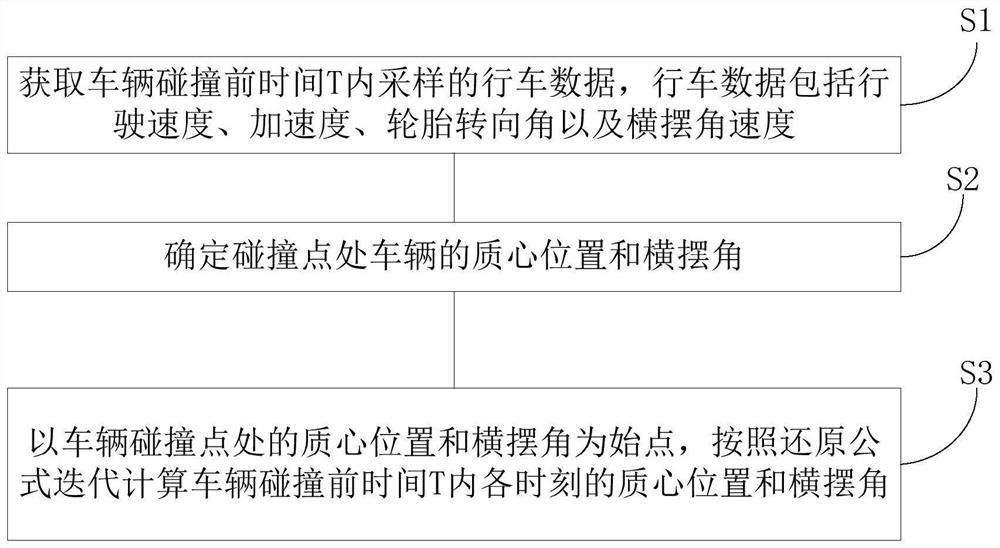
为了实现本发明的上述目的,根据本发明的第一个方面,本发明提供了一种交通事故碰撞前车辆行驶轨迹计算方法,包括:步骤S1,获取车辆碰撞前时间T内采样的行车数据,T大于0,所述行车数据包括行驶速度、加速度、轮胎转向角以及横摆角速度;步骤S2,确定碰撞点处车辆的质心位置和横摆角;步骤S3,以车辆碰撞点处的质心位置和横摆角为始点,即作为t=0时刻的质心位置和横摆角,按照还原公式迭代计算车辆碰撞前时间T内各时刻的质心位置和横摆角,所述还原公式为:
Δt表示计算步长,所述f表示行车数据的采样频率;所述Φ(t+Δt)和Φ(t)分别表示车辆碰撞前t+Δt时刻和t时刻的横摆角;所述w(t+Δt)和w(t)分别表示车辆碰撞前t+Δt时刻和t时刻的横摆角速度;X(t+Δt)和X(t)分别表示车辆碰撞前t+Δt时刻和t时刻车辆质心在大地坐标系XOY下的横轴X轴坐标;Y(t+Δt)和Y(t)分别表示车辆碰撞前t+Δt时刻和t时刻车辆质心在大地坐标系XOY下的纵轴Y轴坐标;v(t)和a(t)分别表示车辆碰撞前t时刻的行驶速度和加速度,v
上述技术方案:本方法能够计算出交通事故中车辆发生碰撞前各时刻车辆的质心位置和横摆角,进而获得碰撞前车辆的行驶轨迹,交警可结合该行驶轨迹和路面标线,判断车辆是否发生违规变道或占道等违法行为,为事故责任划分提供依据。行驶轨迹的精度依赖于计算步长Δt的大小,计算步长Δt最小可以设置为行车数据的采样周期,因此,通过设置合适的采样周期能够确保行驶轨迹具有较高的精度。车辆轨迹上的点由纵向平动(车辆质心的纵坐标)、横向平动(车辆质心的横坐标)和绕垂直于地面且通过车辆质心的竖直轴横摆运动三个自由度来表征,而非简单地仅通过质心位置表征,更符合真实情况,有利于判断事故车辆在碰撞前是否存在变道或占道等行为,上述还原公式将车辆在t+Δt和t时刻的运动近似当做匀变速直线运动,既能保证轨迹点计算的准确性又能加快计算速度。
在本发明的一种优选实施方式中,还包括:步骤S4,在大地坐标系XOY中建立路面标线,依据步骤S3中获取的车辆碰撞前时间T内各时刻的质心位置和横摆角在大地坐标系XOY中绘制车辆碰撞前时间T内的行驶轨迹。
上述技术方案:将路面标线和车辆碰撞前的行驶轨迹共同呈现在大地坐标系XOY中,便于认定交通事故责任。
在本发明的一种优选实施方式中,所述大地坐标系XOY以公路上任一点为坐标原点,以公路延伸方向的垂直方向为X轴方向,X轴逆时针旋转90°为Y轴;建立以车辆质心C为坐标原点,以车辆纵轴为x轴的相对坐标系xCy,x轴逆时针旋转90°为y轴,相对坐标系xCy的x轴正方向与大地坐标系XOY的X轴正方向之间的夹角为车辆的横摆角,车辆轮胎方向与相对坐标系xCy中x轴正方向的夹角为车辆的轮胎转向角。
上述技术方案:通过建立大地坐标系XOY和相对坐标系xCy能够简化计算,方便分析问题。
在本发明的一种优选实施方式中,在所述步骤S1中,从事件数据记录器获得车辆碰撞前时间T内的行车数据;和/或所述步骤S1中获取的行车数据的采样周期小于车辆碰撞时长。
上述技术方案:从事件数据记录器(简称EDR)获得行车数据,EDR数据的采样频率比GPS高,采样频率可以到达10Hz,相比GPS定位,采样时间间隔更小,因此计算精度更高;EDR设备为国家标准强制配备,EDR数据在未来交通事故重建中将发挥重要作用,因此本发明的适应范围广。获取的行车数据的采样周期小于车辆碰撞过程的平均时长能够确保获取的行驶轨迹计算精度。
在本发明的一种优选实施方式中,在所述步骤S2中,确定碰撞点处车辆的质心位置的过程包括步骤A和/或步骤B;所述步骤A为:以车辆碰撞现场的第一散落物起点或大面积散落物中心点作为碰撞点,基于碰撞点在大地坐标系中的位置坐标获得车辆碰撞时的质心位置坐标;所述步骤B为:将车辆制动印或挫划印的突变点作为碰撞点,基于碰撞点在大地坐标系中的位置坐标获得车辆碰撞时的质心位置坐标;当确定车辆在碰撞点处的质心位置的过程同时包括步骤A和步骤B时,还包括融合步骤A和步骤B获得的车辆碰撞时的质心位置坐标,将融合结果作为最终的车辆碰撞时的质心位置坐标的步骤。
上述技术方案:能够准确确定碰撞点位置以及碰撞点处质心位置,特别将步骤A和步骤B的结果融合后,更能提高碰撞点确定的准确性。
在本发明的一种优选实施方式中,在所述步骤S2中,确定碰撞点处车辆的横摆角的过程包括:步骤a,根据车辆前部变形部位和变形面宽度确定碰撞点处车辆的横摆角。
上述技术方案:根据实际碰撞情况确定横摆角,使确定的横摆角较为接近真实情况。
在本发明的一种优选实施方式中,在所述步骤S2中,确定碰撞点处车辆的横摆角的过程还包括:步骤b,根据交通事故现场图绘制交通事故中参与方停驶位置图,将所述参与方停驶位置图导入动力学模拟软件,所述动力学模拟软件根据车辆参数和路面参数,建立车辆及环境参数模型;步骤c,将步骤a中获得的碰撞点处横摆角和碰撞时刻的行驶速度作为初始条件在动力学模拟软件中进行碰撞过程重建,将重建结果与导入的参与方停驶位置图进行对比,若重建结果与导入的参与方停驶位置图不吻合,调整横摆角大小后继续重建,直到重建结果与导入的参与方停驶位置图吻合,将吻合时用于重建的横摆角作为最终的碰撞点处车辆的横摆角。
上述技术方案:通过不断重复循环修改横摆角,使得最终获得的横摆角更为接近真实情况。
为了实现本发明的上述目的,根据本发明的第二个方面,本发明提供了一种交通事故碰撞前车辆行驶轨迹还原系统,包括行车数据获取单元、处理单元和显示单元;所述行车数据获取单元从汽车设备获得车辆碰撞前时间T内采样的行车数据并输出给处理单元;所述处理单元执行本发明所述的交通事故碰撞前车辆行驶轨迹计算方法中的步骤获得车辆碰撞前时间T内车辆的质心位置坐标、偏摆角以及行驶轨迹;所述显示单元与处理单元连接,用于显示车辆碰撞前时间T内的行驶轨迹。
上述技术方案:本系统能够计算出交通事故中车辆发生碰撞前各时刻车辆的质心位置和横摆角,进而获得碰撞前车辆的行驶轨迹并显示,交警可结合该行驶轨迹和路面标线,判断车辆是否发生违规变道或占道等违法行为,为事故责任划分提供依据。行驶轨迹的精度依赖于计算步长Δt的大小,计算步长Δt最小可以设置为行车数据的采样周期,因此,通过设置采样周期能够确保行驶轨迹具有较高精度。车辆轨迹上的点由纵向平动(车辆质心的纵坐标)、横向平动(车辆质心的横坐标)和绕垂直于地面且通过车辆质心的竖直轴横摆运动三个自由度来表征,而非简单地仅通过质心位置表征,能够更符合真实情况,有利于判断事故车辆在碰撞前是否存在变道或占道等行为,上述还原公式将车辆在t+Δt和t时刻的运动近似当做匀变速直线运动,既能保证轨迹点计算的准确性又能加快计算速度。
附图说明
图1是本发明一具体实施方式中交通事故碰撞前车辆行驶轨迹计算方法的流程示意图;
图2是本发明一具体实施方式中大地坐标系XOY和相对坐标系xCy示意图。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,需要理解的是,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,除非另有规定和限定,需要说明的是,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,也可以通过中间媒介间接相连,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
本发明公开了一种交通事故碰撞前车辆行驶轨迹计算方法,在一种优选实施方式中,如图1所示,该方法包括:
步骤S1,获取车辆碰撞前时间T内采样的行车数据,T大于0,行车数据包括行驶速度、加速度、轮胎转向角以及横摆角速度;T优选但不限于为秒级时间,如5秒。横摆角为车辆纵轴与地面坐标系的横轴的夹角,如图2所示,行车速度可分别通过车辆上的速度传感器、加速度传感器、转向角传感器、横摆角传感器以及横摆角速度传感器获得。
步骤S2,确定碰撞点处车辆的质心位置和横摆角;首先需要确定碰撞点位置,一般来说交警在绘制交通事故现场图中会根据经验标记出第一碰撞点(即本申请的碰撞点)位置,由于该碰撞点位置位于车辆上,以及碰撞点与车辆质心的位置关系确定,因此可以获得碰撞点处车辆质心的位置(即车辆发生碰撞时车辆质心的位置)。碰撞点处车辆的横摆角可根据事故现场通过经验判断。
步骤S3,以车辆碰撞点处的质心位置和横摆角为始点,即作为t=0时刻的质心位置和横摆角,按照还原公式迭代计算车辆碰撞前时间T内各时刻的质心位置和横摆角,知道前后两个时刻的时间差Δt后,根据前一个时刻的横摆角、大地坐标系XOY下的横轴坐标和纵轴坐标按照还原公式迭代出下一个时刻的横摆角、大地坐标系XOY下的横轴坐标和纵轴坐标,轨迹计算的初始条件由碰撞位置时刻的横摆角和质心坐标决定,通过逐点迭代计算,即可确定行驶轨迹坐标点,还原公式为:
其中,0≤t≤T,
在本实施方式中,优选的,步骤S1中获取的行车数据的采样周期小于车辆碰撞时长,车辆碰撞时长为从车辆开始碰撞到碰撞结束整个碰撞过程的时长,优选的,这里的车辆碰撞时长可取车辆碰撞过程的时长的平均值,优选但不限于为150ms。Δt优选但不限于为1倍采样周期、2倍采样周期、……。
在本实施方式中,优选的,为便于分析问题和计算,如图2所示,大地坐标系XOY以公路上任一点为坐标原点,以公路延伸方向的垂直方向X轴方向,X轴方向与坐标原点处的公路延伸方向垂直,X轴逆时针旋转90°为Y轴;建立以车辆质心C为坐标原点,以车辆纵轴为x轴的相对坐标系xCy,x轴逆时针旋转90°为y轴,相对坐标系xCy的x轴正方向与大地坐标系XOY的X轴正方向之间的夹角为车辆的横摆角Φ,车辆轮胎方向与相对坐标系xCy中x轴正方向的夹角为车辆的轮胎转向角δ。大地坐标系XOY为固结于大地的静坐标系,相对坐标系xCy为固结于车辆质心C处的相对坐标系,并以车辆纵轴为x轴,车辆前进方向为x轴正方向,以x轴逆时针旋转90°为y轴,轮胎方向与xCy坐标系的x轴正方向的夹角为方向角也存在一个夹角为轮胎在该时刻下的转向角δ。
在一种优选实施方式中,还包括:步骤S4,在大地坐标系XOY中建立路面标线,依据步骤S3中获取的车辆碰撞前时间T内各时刻的质心位置和横摆角在大地坐标系XOY中绘制车辆碰撞前时间T内的行驶轨迹。
在一种优选实施方式中,在步骤S1中,从事件数据记录器获得车辆碰撞前时间T内的行车数据。
在本实施方式中,EDR(Event Data Recorder,事件数据记录器)是内置于车辆ACM(Airbag Control Modules,气囊控制模块)中的一块数据存储芯片,可以记碰撞故发生前5s和碰撞过程中车辆运动参数及驾驶行为,也称为汽车“黑匣子”。2006年美国高速公路交通管理局发布了定义和强制EDR标准的规范:49CFR Part 563,协议规定汽车生产商必须配备并开放EDR数据供公众监督。美国记录在EDR中的数据至少包括15个类别:碰撞前行驶速度、引擎转速、气囊是否点爆、制动状态、安全带是否使用、油门踏板位置、ΔV——时间曲线、车辆档位、转向角、转向角率等。中国也在2017年9月发布GB7258-2017《机动车运行安全技术条件》规定乘用车应配备能记录碰撞等特定事件发生时的车辆行驶速度、制动状态等数据信息的事件数据记录系统(EDR)。该要求自2021年1月1日起实施。为了配合GB7258-2017的执行,国家标准委正在制定强制性国家标准《汽车事件数据记录系统》,从征求意见稿的内容看,A级数据23项,B级数据50项(A级为强制执行,B级为有条件的主机厂选择性配置),较美国标准记录的数据更为丰富。因此EDR数据在未来交通事故调查,交通事故重建中将发挥重要作用。
在一种优选实施方式中,在步骤S2中,确定碰撞点处车辆的质心位置的过程包括步骤A和/或步骤B;
步骤A为:以车辆碰撞现场的第一散落物起点或大面积散落物中心点作为碰撞点,基于碰撞点在大地坐标系中的位置坐标获得车辆碰撞时的质心位置坐标;
步骤B为:将车辆制动印或挫划印的突变点作为碰撞点,基于碰撞点在大地坐标系中的位置坐标获得车辆碰撞时的质心位置坐标;
当确定车辆在碰撞点处的质心位置的过程同时包括步骤A和步骤B时,还包括融合步骤A和步骤B获得的车辆碰撞时的质心位置坐标,将融合结果作为最终的车辆碰撞时的质心位置坐标的步骤。融合处理的方法优选但不限于为步骤A和步骤B获取的质心位置连线的中点位置作为最终的质心位置。
在本实施方式中,碰撞时车体碰撞变形部位正处于碰撞点处,由于车体的碰撞变形部位与车辆质心的位置关系是一定的,因此可以获得碰撞点处的质心位置坐标。
在一种优选实施方式中,在步骤S2中,确定碰撞点处车辆的横摆角的过程包括:
步骤a,根据车辆前部变形部位和变形面宽度确定碰撞点处车辆的横摆角。
在本实施方式中,碰撞时刻横摆角的意思就是碰撞方向,一般来说,若车辆的变形部非车辆前部,那车辆在事故中可能不是责任方,若碰撞车辆前部变形,该车辆可能是责任方,通常情况下前车是正常行驶的,根据后车的变形部位可以大致估算前车尾部与后车前部的接触角度,将该接触角度作为碰撞时的横摆角。步骤a中方法虽然能够快速得到碰撞点处车辆的横摆角,但是得到的横摆角精度不高,需要通过步骤b,步骤c进行优化处理。
在一种优选实施方式中,在步骤S2中,确定碰撞点处车辆的横摆角的过程还包括:
步骤b,根据交通事故现场图绘制交通事故中参与方停驶位置图,优选但不限于通过AUTOCAD绘制,将所述参与方停驶位置图导入动力学模拟软件,动力学模拟软件根据车辆参数和路面参数,建立车辆及环境参数模型;动力学模拟软件优选但不限于为现有的PC-Crash、PreScan或者CarSim,这些动力学模拟软件能够重建车辆碰撞后行驶轨迹。
步骤c,将步骤a中获得的碰撞点处横摆角和碰撞时刻的行驶速度作为初始条件在动力学模拟软件中进行碰撞过程重建,将重建结果与导入的参与方停驶位置图进行对比,若重建结果与导入的参与方停驶位置图不吻合,调整横摆角大小后继续重建,直到重建结果与导入的参与方停驶位置图吻合,将吻合时用于重建的横摆角作为最终的碰撞点处车辆的横摆角。
在本实施方式中,优选的,吻合和不吻合的定义为:获取重建结果中所有参与方在事故中的停驶位置,将这些位置与导入的参与方停驶位置图中的位置一一对应(按照参与方名称、开始、停止这些参数对应),如重建结果中车辆A的起始位置与导入的参与方停驶位置图中车辆A的起始位置对应,重建结果中车辆A的停止位置与导入的参与方停驶位置图中车辆A的停止位置对应,计算所有对应位置对的差值绝对值,若数值最大的差值绝对值小于等于预设的差值阈值,认为重建结果与导入的参与方停驶位置图吻合,若数值最大的差值绝对值大于预设的差值阈值,认为重建结果与导入的参与方停驶位置图不吻合。
本发明公开了一种交通事故碰撞前车辆行驶轨迹还原系统,在一种优选实施方式中,该系统包括行车数据获取单元、处理单元和显示单元;行车数据获取单元从汽车设备获得车辆碰撞前时间T内采样的行车数据并输出给处理单元;处理单元执行上述交通事故碰撞前车辆行驶轨迹计算方法中的步骤获得车辆碰撞前时间T内车辆的质心位置坐标、偏摆角以及行驶轨迹;显示单元与处理单元连接,用于显示车辆碰撞前时间T内的行驶轨迹。
在本实施方式中,优选的,汽车设备为事件数据记录器。
事故现场路面痕迹、散落物痕迹和车辆停驶位置进行对比,若数据吻合度较差,则通过调整横摆角使重建结果与实际数据吻合最好。数据吻合效果最好时的角度为碰撞时刻的横摆角,定义为Φ(t0)。用CAD绘制事故车辆停驶位置,将CAD图导入动力学模拟软件,
步骤b,将所述步骤a中获得碰撞点处的横摆角作为碰撞点处的初步横摆角在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
- 一种交通事故碰撞前车辆行驶轨迹计算方法及系统
- 一种车辆行驶轨迹调整方法及车辆行驶轨迹调整系统