一种室内智能消毒机器人
文献发布时间:2023-06-19 11:37:30
技术领域
本发明属于室内消毒设备设施技术领域,具体涉及一种室内智能消毒机器人。
背景技术
室内消毒的主要作用在于:杀灭污染室内空气的有害微生物。常用方法有自然通风、紫外线灯消毒、臭氧及其他化学消毒剂(过氧乙酸熏蒸、过氧化氢气溶胶喷雾、乳酸熏蒸)消毒和静电等空气净化器消毒等。
在实际的消毒过程中,现有的室内消毒措施存在如下技术问题:
1.消毒时间长;
2.消毒液体有残留,并且有消毒液的刺激性味道;
3.有消毒死角的问题;
4.对空气无净化功能。
例如,中国发明专利申请号为CN202010268379.X的专利申请文献公开了一种室内消毒系统,应用于空调器,所述室内消毒系统包括控制模块及与所述控制模块通信连接的浓度检测模块和消毒水喷射开关,所述控制模块还与所述空调器的遥控模块和通风模块通信连接;
所述控制模块(110)用于在接收到所述遥控模块(200)发送的开始消毒信号时,控制所述通风模块(300)开启通风,并在第一预设时长后控制所述消毒水喷射开关(120)打开以开启消毒;
所述浓度检测模块(130)用于在消毒过程中实时检测当前房间的消毒水浓度并发送至所述控制模块(110);
所述控制模块(110)还用于在所述消毒水浓度达到第一设定值时,控制所述消毒水喷射开关(120)关闭以停止消毒。
上述现有技术公开了一种室内消毒系统,在实际的应用过程中,即存在着上述消毒液体有残留并且有消毒液的刺激性味道及存在消毒死角的问题。
基于现有技术存在的上述技术问题,本发明提出一种室内智能消毒机器人。
发明内容
本发明提供一种室内智能消毒机器人。
为达到上述目的,本发明采用以下技术方案:
一种室内智能消毒机器人,包括:
激光雷达,用于获取环境点云数据;
主控制器,连接于所述激光雷达以接收所述环境点云数据;
供电装置,连接于所述主控制器以为所述机器人供电;
电机,连接于所述主控制器以根据所述主控制器的指令实现电机的动作;
行走装置,连接于所述电机以受所述电机的驱动而行走;
紫外线发生装置,设置在所述行走装置上并随所述行走装置一起行进,连接于所述主控制器以根据所述主控制器的控制产生紫外线光;
等离子消毒及过滤装置,设置在所述行走装置上并随所述行走装置一起行进,连接于所述主控制器以对室内空气进行消毒及过滤。
进一步地,所述主控制器通过电机控制器连接于所述电机。
进一步地,所述行走装置为轮式小车或履带式小车。
进一步地,所述主控制器还连接有用于环境监控图像采集的摄像头。
进一步地,所述主控制器还连接有环境传感器。
进一步地,所述环境传感器为温湿度传感器、PM2.5传感器、CO
进一步地,所述主控制器还连接有功放,所述功放用于语音提示及示警。
进一步地,所述紫外线发生装置包括紫外驱动器和连接于所述紫外驱动器的紫外灯管,所述紫外驱动器连接于所述主控制器。
进一步地,所述等离子消毒及过滤装置包括用于过滤尘埃颗粒的第一过滤器、用于吸附空气中异味分子的第二过滤器和等离子发生装置,其中,所述第一过滤器、所述第二过滤器和所述等离子发生装置均连接于所述主控制器。
进一步地,所述第二过滤器采用活性炭过滤。
进一步地,所述等离子发生装置通过等离子驱动装置连接于所述主控制器。
与现有技术相比,本发明的优越效果在于:
本发明所述的室内智能消毒机器人,通过电机、紫外线发生装置和等离子消毒及过滤装置的配合设置,替代了消毒液的消毒方式,消除了采用消毒液带来的消毒液体有残留并且有消毒液的刺激性味道的技术问题;
本发明所述的室内智能消毒机器人,通过激光雷达、电机控制器和电机的配合设置,使电机能够方便的进行位置的调整,避免了存在消毒死角的问题。
附图说明
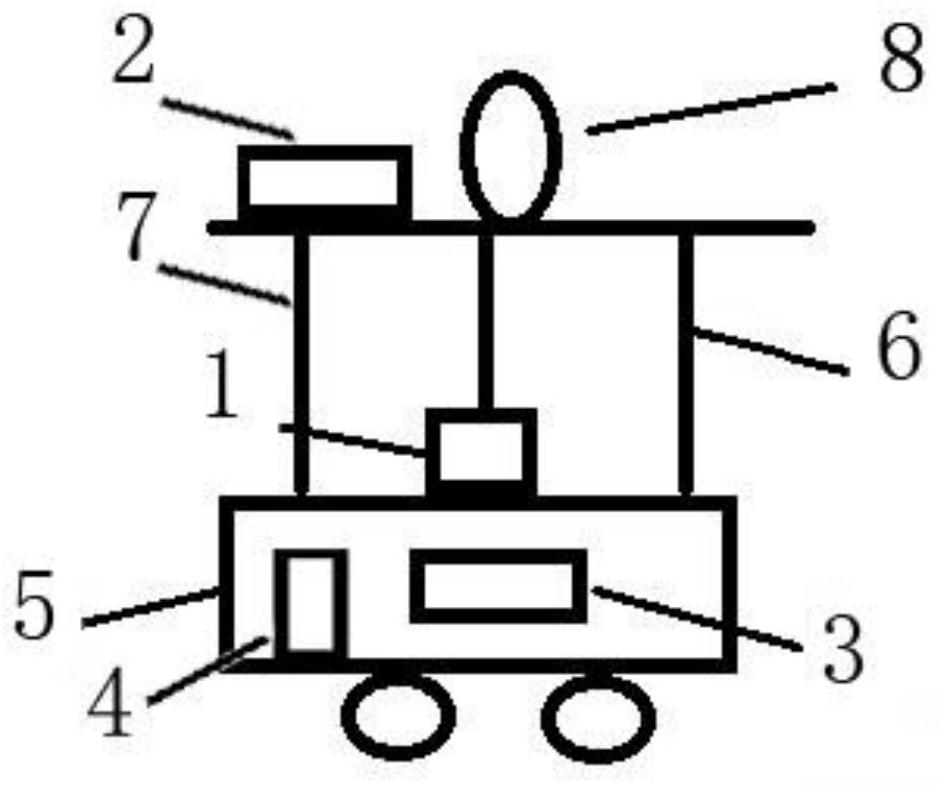
图1是本发明实施例中的室内智能消毒机器人的示意图;
图2是本发明实施例中的紫外线发生装置的示意图;
图3是本发明实施例中的等离子消毒及过滤装置的示意图。
图中,1-激光雷达、2-主控制器、3-供电装置、4-电机、5-行走装置、6-紫外线发生装置、61-紫外驱动器、62-紫外灯管、7-等离子消毒及过滤装置、71-第一过滤器、72-第二过滤器、8-摄像头。
具体实施方式
为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述,需要说明的是,在不冲突的情况下,本申请的实施例及实施例中的特征可以相互组合。
实施例
如图1所示,所述室内智能消毒机器人,包括:
激光雷达1,用于获取环境点云数据;
主控制器2,连接于所述激光雷达1以接收所述环境点云数据;
供电装置3,连接于所述主控制器2以为所述机器人供电;
电机4,连接于所述主控制器2以根据所述主控制器2的指令实现电机4的动作;
行走装置5,连接于所述电机4以受所述电机4的驱动而行走;
紫外线发生装置6,设置在所述行走装置5上并随所述行走装置5一起行进,并连接于所述主控制器2以根据所述主控制器2的控制产生紫外线光;
等离子消毒及过滤装置7,连接于所述主控制器以对室内空气进行消毒及过滤。
在上述实施例中,所述环境点云数据用于:通过SLAM技术进行室内地图的构建与机器人定位使用,通过所述SLAM技术构建所述室内智能消毒机器人对自身和周边环境的空间的认知,有了这个基础,所述室内智能消毒机器人就进行路径规划去达要去的目的地,在此过程中还能够检测躲避遇到的障碍物,保证运行安全;
所述供电装置3采用蓄电池,所述供电装置3设有充电接口;
所述主控制器2采用PLC、单片机或PC机的一种。
在上述实施例中,紫外线光作用于微生物,能破坏微生物的脱氧核糖核酸(DNA)与核糖核酸(RNA),打破有机物分子的S-H和C-H键,能够有效杀除霉菌、革兰氏阳性致病菌、革兰氏阴性致病菌、需氧细菌芽孢和真菌分生孢子、金黄色葡萄球菌、枯草杆菌、酵母菌等细菌,在一定时间内能够抑制细菌的繁衍,提高了消毒的效果。
在上述实施例中,所述行走装置5为轮式小车或履带式小车,所述主控制器2根据室内地图与机器人定位对环境进行判断,通过控制所述电机4的启动、加速、前进、转向、减速、停步等动作实现所述行走装置5的上述移动,所述行走装置5载有所述紫外线发生装置6和所述等离子消毒及过滤装置7以对环境进行消毒作业。
所述主控制器2通过电机控制器连接于所述电机4。
所述主控制器2还连接有用于环境监控图像采集的摄像头8。
在上述实施例中,所述主控制器2可对图像数据进行分析,判断是否有物体进入,如果在消毒过程中,当有人或者物体进入时,及时控制所述紫外线发生装置6和所述等离子消毒及过滤装置7停止工作,停止消毒;
所述主控制器2通过图像识别传感器进行对图像数据进行分析。
所述主控制器2还连接有环境传感器。
在上述实施例中,所述环境传感器为温湿度传感器、PM2.5传感器、CO
所述主控制器2还连接有功放,所述功放用于语音提示及示警。
如图2所示,所述紫外线发生装置6包括紫外驱动器61和连接于所述紫外驱动器61的紫外灯管62,所述紫外驱动器61连接于所述主控制器2。
在上述实施例中,所述紫外灯管能够安装在三个位置,一组安装在机器人内部,与等离子消毒一起对空气进行消毒,具体工作原理为,使用风扇将环境空气吸入位于机器人内部的消毒仓,空气经过机器人内部的紫外灯管,紫外灯管发出UVC对空气进行消毒;
另外一组紫外灯管安装在机器人的底盘下部,在机器人行进过程中对地面进行消毒;
第三组紫外灯管,同样安装在机器人的底盘下部,通过电缸或气缸使第三组紫外灯管能够伸出(例如伸入到机器人移动不到的沙发底下)进行消毒,基于上述基础的一种改进,将第三组紫外灯管上安装有电机,使第三组紫外灯管能够伸出后并进行旋转,基于上述基础的另一种改进,第三组紫外灯管还设有紫外镜面反光装置,使第三组紫外灯管能够以光束的形式进行消毒。
如图3所示,所述等离子消毒及过滤装置7包括用于过滤尘埃颗粒的第一过滤器71、用于吸附空气中异味分子的第二过滤器72和等离子发生装置,其中,所述第一过滤器71、所述第二过滤器72和所述等离子发生装置均连接于所述主控制器2,所述第一过滤器71和所述第二过滤器72配合工作,空气先经所述第一过滤器71过滤后再进入所述第二过滤器72中。
在上述实施例中,所述第一过滤器71采用布袋式空气过滤器,所述布袋式空气过滤器的滤网为500目;
所述第二过滤器采用活性炭过滤;
所述等离子发生装置为静态放电式等离子发生器。
所述等离子发生装置通过等离子驱动装置连接于所述主控制器。
本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书界定。
- 一种室内智能消毒机器人
- 一种大棚室内智能消毒机器人