一种基于车路云协同的智能公交车控制系统
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及智能网联汽车领域,尤其是涉及一种基于车路云协同的智能公交车控制系统。
背景技术
目前智能网联公交车主要是以“单车智能”为主,即依靠车载的传感系统、定位系统及决策控制系统对车辆进行自动驾驶控制。然而智能公交车仅依靠“单车智能”无法有序的统一管理与调度,也无法实现信号优先的高效通行,并且在系统故障情况下无法自行有效处理。
随着LTE-V和5G等车联网技术的发展,基于车路云协同的智能决策与控制成为解决上述问题的重要手段,尤其适用于行驶路线及场景较为固定、现阶段落地应用可能性大的公交车辆,因此如何利用车、路、云等多源信息,控制智能公交车高效、有序的运行,且具备故障情况下的远程接管能力成为是本领域技术人员亟需解决的问题。
发明内容
本发明的目的就是为了克服智能公交车仅依靠“单车智能”无法有序的统一管理与调度,无法实现信号优先的高效通行,并且在系统故障情况下无法自行有效处理等缺陷而提出的一种基于车路云协同的智能公交车控制系统。
本发明的目的可以通过以下技术方案来实现:
一种基于车路云协同的智能公交车控制系统,包括:
感知子系统,对智能公交车及路端周边环境目标信息进行数据采集和数据处理,生成车端感知信息和路端感知信息;
云控子系统,获取对智能公交车进行智能调度、信号优先引导及远程监控与干预控制的数据信息,生成云端指令;
通信子系统,实现车端、路端及云端之间的无线通信;
车路云协同决策与控制子系统,根据所述云端指令、车端感知信息及路端感知信息,控制智能公交车进行自动行驶。
所述感知子系统设有车端感知模块和路端感知模块,通过车端感知模块生成车端感知信息,通过路端感知模块生成路端感知信息。
所述通信子系统包括车端V2X通信模块和路/云端V2X通信模块,所述路/云端V2X通信模块与车端V2X通信模块通过LTE-V或5G的无线通信方式连接。
进一步地,所述路/云端V2X通信模块通过以太网与路端感知模块、云控子系统连接,所述车端V2X通信模块通过以太网与车路云协同决策与控制子系统连接。
所述云控子系统设有云端智能调度模块、云端信号优先模块、云端远程监控模块和云端远程干预与控制模块。
进一步地,所述云端智能调度模块获取智能公交车行驶区域高精度地图,对智能公交车行驶的全局路径进行规划;所述云端信号优先模块获取智能公交车实时位置及路口交通信号灯信息,计算得到智能公交车的引导车速;所述云端远程监控模块对车端及路端的设备的运行状态及关键参数进行监控;所述云端远程干预与控制模块根据云端远程监控模块的监控信息,判断智能公交车行驶是否存在异常,若是则获取云端驾驶舱的远程操控指令,并发送到车路云协同决策与控制子系统。
进一步地,所述全局路径包括运行线路起点和终点之间的位置坐标信息;车端的设备包括车端的传感及计算设备、底盘系统,路端的设备包括路端的传感及计算设备;所述远程操控指令包括方向盘转角、油门踏板开度、制动踏板开度。
所述车路云协同决策与控制子系统包括信息融合模块、决策指令判断模块、局部运动规划模块、运动控制模块和线控底盘模块。
进一步地,车端感知模块对智能公交车周边环境目标信息的数据采集和数据处理,根据处理结果生成车端感知信息传输给车路云协同决策与控制子系统的信息融合模块;路端感知模块对路端环境目标信息的数据采集和数据处理,根据处理结果生成路端感知信息,通过通信子系统传输给车路云协同决策与控制子系统的信息融合模块。
进一步地,所述信息融合模块,将感知子系统传输过来的车端感知信息和路端感知信息进行融合和处理,形成包括其他交通参与者的障碍物占据的栅格地图;
所述决策指令判断模块,根据所述栅格地图判断全局路径上是否存在有碰撞风险的交通参与者,若有存在碰撞风险的出现,启动局部运动规划模块,否则按照云端信号优先模块的引导车速行驶;
所述局部运动规划模块,根据存在碰撞风险的交通参与者的信息进行局部运动规划,包括局部路径和局部车速,并发送给运动控制模块;
所述运动控制模块,根据云控子系统的全局路径和引导车速,或者局部路径和局部车速,输出自车所需的行驶指令,并传输给线控底盘模块;
所述线控底盘模块,判断智能公交车行驶是否存在异常,若否则执行运动控制模块输出的行驶指令,若是则执行云端远程干预与控制模块发送的远程操控指令。
进一步地,所述运动控制模块根据决策指令判断模块判断有存在碰撞风险的交通参与者出现时,根据局部路径和局部车速输出行驶指令,决策指令判断模块判断碰撞风险解除后,运动控制模块根据全局路径和引导车速输出行驶指令。
与现有技术相比,本发明具有以下有益效果:
本发明基于LTE-V和5G先进车联网技术,进行有序的统一管理与调度,在常规工况下控制智能公交车按照云端的智能调度及信号优先引导指令自动行驶,在云端监控异常或存在碰撞风险等非常规工况下控制智能公交车实现局部运动规划或通过云端进行远程干预控制,既可保证智能公交车在常规工况下高效、有秩序的运行,也可保证非常规工况下智能公交车行驶的安全性。
附图说明
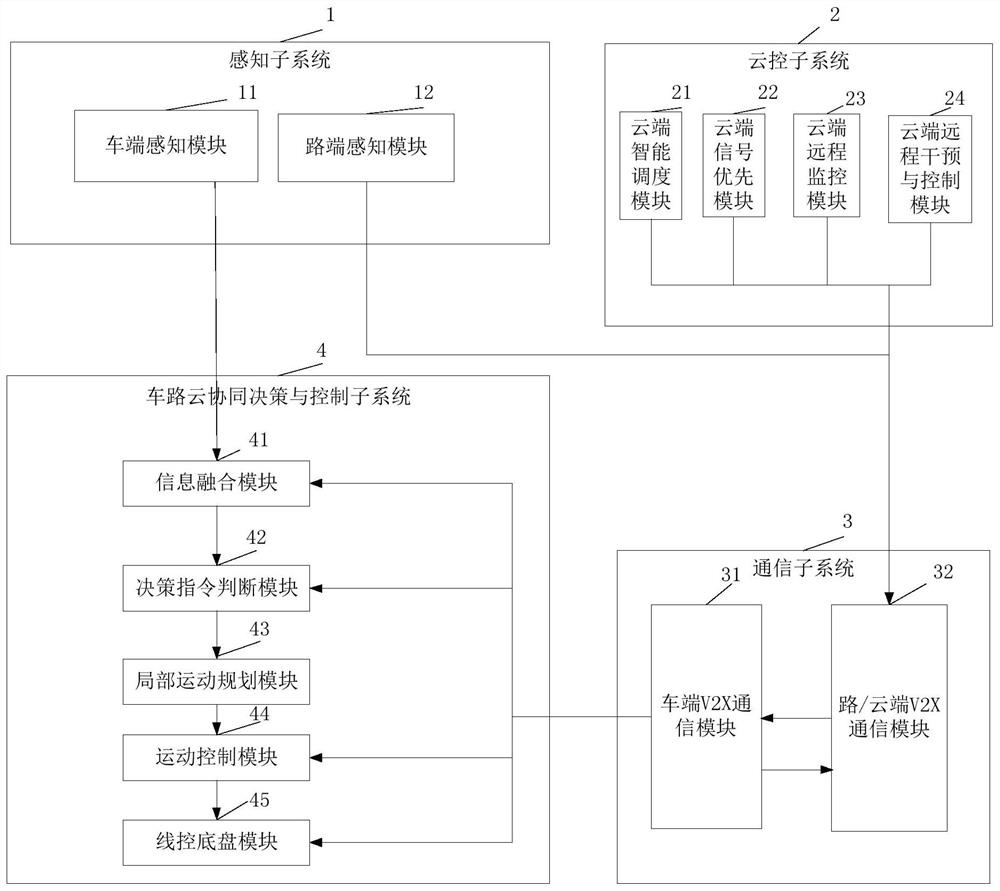
图1为本发明的结构示意图;
图2为本发明的数据处理流程示意图。
附图标记:
1-感知子系统;2-云控子系统;3-通信子系统;4-车路云协同决策与控制子系统;11-车端感知模块;12-路端感知模块;21-云端智能调度模块;22-云端信号优先模块;23-云端远程监控模块;24-云端远程干预与控制模块;31-车端V2X通讯模块;32-路/云端V2X通讯模块;41-信息融合模块;42-决策指令判断模块;43-局部运动规划模块;44-运动控制模块;45-线控底盘模块。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
实施例
如图1所示,本发明实施例公开了一种基于车路云协同的智能公交车控制系统,该系统包括:
感知子系统1,对智能公交车及路端周边环境目标信息进行数据采集和数据处理,生成车端感知信息和路端感知信息;
云控子系统2,获取对智能公交车进行智能调度、信号优先引导及远程监控与干预控制的数据信息,生成云端指令;
通信子系统3,实现车端、路端及云端之间的无线通信;
车路云协同决策与控制子系统4,根据云端指令、车端感知信息及路端感知信息,控制智能公交车进行自动行驶。
感知子系统1设有车端感知模块11和路端感知模块12,车端感知模块11对智能公交车周边环境目标信息的数据采集和数据处理,根据处理结果生成车端感知信息传输给车路云协同决策与控制子系统4的信息融合模块41;路端感知模块12对路端环境目标信息的数据采集和数据处理,根据处理结果生成路端感知信息,通过通信子系统3传输给车路云协同决策与控制子系统4的信息融合模块41。
云控子系统2设有云端智能调度模块21、云端信号优先模块22、云端远程监控模块23和云端远程干预与控制模块24。
云端智能调度模块21获取智能公交车行驶区域高精度地图,对智能公交车行驶的全局路径进行规划;云端信号优先模块22获取智能公交车实时位置及路口交通信号灯信息,计算得到智能公交车的引导车速;云端远程监控模块23对车端及路端的设备的运行状态及关键参数进行监控;云端远程干预与控制模块24根据云端远程监控模块的监控信息,判断智能公交车行驶是否存在异常,若是则获取云端驾驶舱的远程操控指令,并发送到车路云协同决策与控制子系统4。
当智能公交车行驶存在异常时,由位于云端驾驶舱内的安全员对智能公交车进行远程操控,发送远程操控指令到车路云协同决策与控制子系统4。
全局路径包括运行线路起点和终点之间的位置坐标信息;车端的设备包括车端的传感及计算设备、底盘系统,路端的设备包括路端的传感及计算设备;远程操控指令包括方向盘转角、油门踏板开度、制动踏板开度。
通信子系统3包括车端V2X通信模块31和路/云端V2X通信模块32,路/云端V2X通信模块32与车端V2X通信模块31通过LTE-V或5G的无线通信方式连接。
路/云端V2X通信模块32通过以太网与路端感知模块12、云控子系统2连接,车端V2X通信模块31通过以太网与车路云协同决策与控制子系统4连接。
车路云协同决策与控制子系统4包括信息融合模块41、决策指令判断模块42、局部运动规划模块43、运动控制模块44和线控底盘模块45。
信息融合模块41,将感知子系统1传输过来的车端感知信息和路端感知信息进行融合和处理,形成包括其他交通参与者的障碍物占据的栅格地图;
决策指令判断模块42,根据栅格地图判断全局路径上是否存在有碰撞风险的交通参与者,若有存在碰撞风险的交通参与者出现,启动局部运动规划模块43,否则按照云端信号优先模块22的引导车速行驶;
局部运动规划模块43,根据存在碰撞风险的交通参与者的信息进行局部运动规划,包括局部路径和局部车速,并发送给运动控制模块44;
运动控制模块44,根据云控子系统2的全局路径和引导车速,或者局部路径和局部车速,输出自车所需的行驶指令,行驶指令包括方向盘转角、驱动电机扭矩、制动液压力,并传输给线控底盘模块45;
线控底盘模块45,判断智能公交车行驶是否存在异常,若否则执行运动控制模块44输出的行驶指令,若是则执行云端远程干预与控制模块24发送的远程操控指令。
本实施例中,交通参与者包括车辆、行人和自行车,行驶指令包括方向盘转角、驱动电机扭矩和制动液压力。
运动控制模块44根据决策指令判断模块42判断有存在碰撞风险的交通参与者出现时,根据局部路径和局部车速输出行驶指令,决策指令判断模块42判断碰撞风险解除后,运动控制模块44根据全局路径和引导车速输出行驶指令。
此外,需要说明的是,本说明书中所描述的具体实施例,所取名称可以不同,本说明书中所描述的以上内容仅仅是对本发明结构所做的举例说明。凡依据本发明构思的构造、特征及原理所做的等效变化或者简单变化,均包括于本发明的保护范围内。本发明所属技术领域的技术人员可以对所描述的具体实例做各种各样的修改或补充或采用类似的方法,只要不偏离本发明的结构或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
- 一种基于车路云协同的智能公交车控制系统
- 一种智能公交车路协同控制系统及其使用方法