一种基于AGV的主起整流罩调姿平台柔性入位装置及方法
文献发布时间:2023-06-19 11:49:09
技术领域
本发明属于飞机数字化装配领域,尤其是涉及一种基于AGV的主起整流罩调姿平台柔性入位装置及方法。
背景技术
AGV(Automation Guided Vehicle)是指装备有电磁或光学等自动引导装置,能够沿着规定的引导路径行驶并且具有安全保护以及各种移栽功能的运输车。AGV在工厂物流自动化、自动化装配线等领域有着相当广泛的应用。
AGV平台一般按照行走方式分为单向行走、双向行走、全向行走。与传统的传送辊道或传送带相比,AGV系统输送线路具有施工简单、路径灵活、不占用空间、较好的移动性、柔软等优点。因此,应用AGV智能导航运输系统,可以大大节省人力成本,提高车间作业安全,改善车间工作环境,提高运输效率,且不易发生安全事故。
如公开号为CN110550118A的中国专利文献公开了一种增程转运对接AGV设备,包括半挂车平台和基于麦克纳姆轮的全向移动平台;还包括剪叉升降平台,还包括自动对接装置,控制升降平台的垂直方向运动到对接位置,还包括车载发电机组,设备的能源来源为车载发电机组。
公开号为CN210707694U的中国专利文献公开了一种AGV转运车,其升降结构包括固持插销、升降板、驱动机构,升降板固定在车体的滑轨组上,一组对称的固持插销安装在升降板,并在驱动机构带动下垂直于升降板伸缩运动夹持待抬升的物体。
然而,现有的AGV的引导路线不是最优解,行程不够精确,系统维护成本高,对AGV的应用造成阻碍。且现有AGV平台的顶升系统在装配工作时无法实现柔性入位,导致安装入位时冲击较大。
发明内容
为解决现有技术存在的上述问题,本发明提供了一种基于AGV的主起整流罩调姿平台柔性入位装置及方法,用于主起整流罩及装置的移动、运输,该设备可按照设计规划的路径移动,并进行产品的柔性入位和撤离。
一种基于AGV的主起整流罩调姿平台柔性入位装置,包括AGV车架以及安装在AGV车架上的驱动系统、顶升系统、控制系统、导航系统和安全系统;
所述的驱动系统包括安装在AGV车架下部的驱动轮组和支撑轮组,用于驱动AGV车架的整体运动;
所述的顶升系统包括安装在AGV车架上部的多个顶升气囊,用于实现对整流罩调姿平台的举升和下降入位;
所述的控制系统用于控制驱动系统和顶升系统,以实现驱动轮组的全向运动以及举升气囊的升降运动;
所述的导航系统与控制系统电连接,用于实时优化路径,并将优化后的路径发送给控制系统,以实现驱动系统按照导航系统的路径规划进行运动;
所述的安全系统安装在AGV车架的上部或四周侧壁,用于实现驱动系统的急停与快速恢复。
进一步地,所述的驱动轮组包括驱动轮、伺服电机、高扭矩精密减速机和独立悬挂系统;
所述的伺服电机、高扭矩精密减速机和独立悬挂系统安装在AGV车体的下部,伺服电机的输出轴与高扭矩精密减速机通过联轴器传动连接,高扭矩精密减速机的输出轴穿过独立悬挂系统后与驱动轮连接;所述的伺服电机与控制系统电连接,通过控制系统对伺服电机进行控制。
每处驱动轮组都设计为独立悬挂,可增强对地面的适应性。多轮组合可以实现在二维平面内任意方向移动功能,包括前进、后退、左右横行、斜行、中心回转、任意曲线移动等全向移动形式。
优选地,所述的驱动轮采用麦克纳姆轮。
进一步地,所述顶升气囊的外部设有圆筒形的气囊罩壳,气囊罩壳与气囊通过螺栓连接。所述的气囊罩壳在顶升气囊处于顶升位置时,辅助增加气囊的刚性。
进一步地,所述的AGV车架上设有电力系统,所述的电力系统包括蓄电池、逆变器及充电装置,所述的蓄电池及逆变器安装在AGV车架内部,AGV车体的侧边预留充电装置的充电插座结构。
所述导航系统采用视觉导航的模式,因此AGV具有自导引功能。导航系统由相机、镜头、光源、处理系统,导航彩带组成,可实现色带导引及二维码定位,实现设备的自导引行驶。按固定路径实现主起整流罩及集成化调整系统的运输。通过二维码,可以设置AGV的减速位置及停止位置,用于增加AGV的定位精度。
进一步地,所述的安全系统包括声光警示灯、急停开关、安全触边及扫描仪;所述的声光警示灯、急停开关、安全触边及扫描仪均安装在AGV车架的四周或上部。
本发明还提供了一种基于AGV的主起整流罩调姿平台柔性入位方法,采用上述基于AGV的主起整流罩调姿平台柔性入位装置,包括以下步骤:
(1)AGV移动至调姿平台下方,顶升系统开始工作,顶升气囊上升到最大伸长高度,
(2)顶升气囊将调姿平台顶起脱离地面,通过导航系统规划的路径,控制系统控制驱动系统,使柔性入位装置装载着调姿平台行驶到定位点后停止行驶;
(3)顶升系统开始工作,多个顶升气囊同步开始放气,顶升气囊从最大伸长高度开始同步下降;顶升气囊放气下降过程中刚度下降,气囊在气不充足时具有一定程度的挠性,减轻调姿平台底座的定位销与定位底座配合时的冲击,以实现调姿平台柔性入位。
与现有技术相比,本发明具有以下有益效果:
1、本发明采用顶升气囊来实现整体底座的举升与下降入位,当调姿平台需要柔性入位时,气囊需放气下降。该气囊在气不充足时具有一定程度的挠性,较软,可适应调姿平台单元的柔性入位;
2、每处轮组都设计有独立悬挂,可增强对地面的适应性,避免打滑现象。多轮组合可以实现在二维平面内任意方向移动功能,包括前进、后退、左右横行、斜行、中心回转、任意曲线移动等全向移动形式;
附图说明
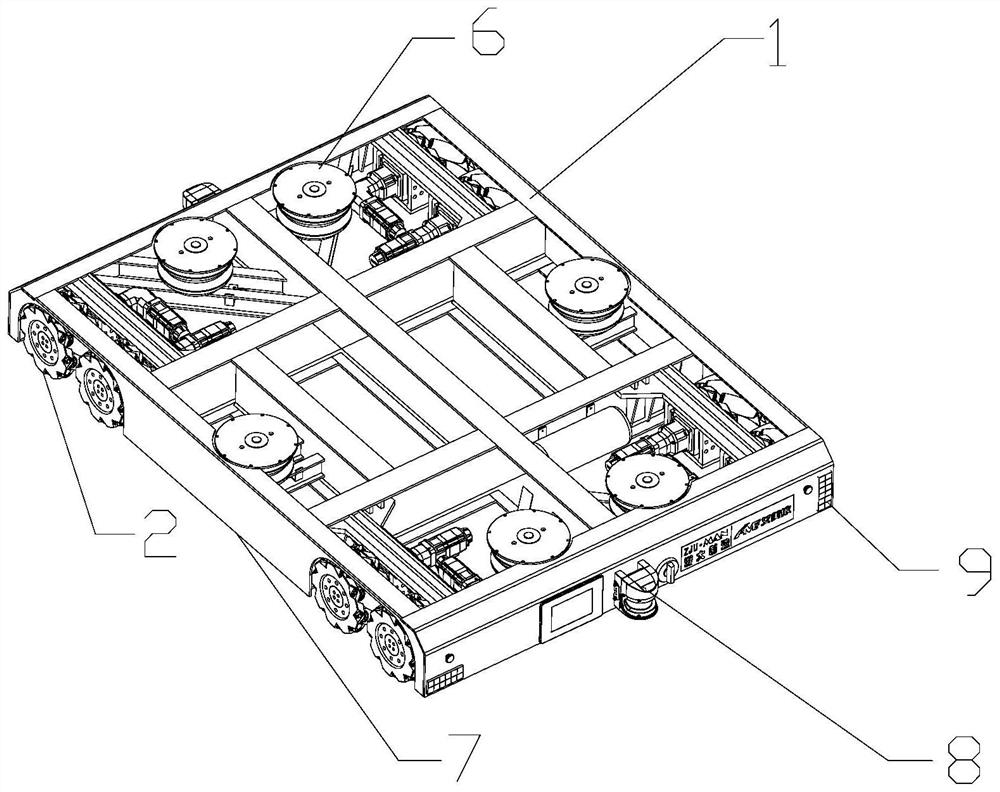
图1为本发明一种基于AGV的主起整流罩调姿平台柔性入位装置的整体结构示意图;
图2为本发明实施例中驱动轮组的结构示意图;
图3为本发明实施例中顶升系统的结构示意图。
图中:1-AGV车架;2-麦克纳姆轮;3-独立悬挂系统;4-高扭矩精密减速机;5-伺服电机;6-顶升系统;61-顶升气囊;62-气囊罩壳;7-安全触边;8-安全扫描仪;9-声光警示灯。
具体实施方式
下面结合附图和实施例对本发明做进一步详细描述,需要指出的是,以下所述实施例旨在便于对本发明的理解,而对其不起任何限定作用。
应理解的是,文中时用的术语仅处于描述特定实例实施方式的目的,而无意进行限制。除非上下文另外明确地指出,否则如文中使用的单数形式“一”、“一个”以及“所述”也可以表示包括复数形式,术语“包括”、“包含”、“含有”以及“具有”是包含性的,并且因此指明所陈述的特征、步骤、操作、元件、和/或它们的组合。文中描述的方法步骤以及操作不解释为必须要求它们所描述或所说明的特征顺序执行,除非明确指出执行顺序,还应当理解,可以使用另外或替代的步骤。
尽管可以使用术语第一、第二、第三等来描述多个元件、部件、区域、层和/或部段,但是这些元件、部件、区域、层和/或部段不应被这些术语所限制。这些术语可以仅用来将一个元件、部件、区域、层和/或部段与另一元件、部件、区域、层和/或部段分开。除非上下文明确地指出,否则诸如“第一”、“第二”之类的术语在文中使用时并不暗示顺序或次序。因此,以下讨论的第一元件、部件、区域、层和/或部段在不脱离实例实施方式的教导下可以被称作第二元件、部件、区域、层和/或部段。
如图1~3所示,一种基于AGV的主起整流罩调姿平台柔性入位装置,包括AGV车架1以及安装在AGV车架1上的驱动系统、顶升系统6、控制系统、导航系统和安全系统。
驱动系统包括安装在AGV车架下部的驱动轮组和支撑轮组,用于驱动AGV车架的整体运动。
本实施例中,驱动轮组和支撑轮组各有四处。如图2所示,驱动轮组由麦克纳姆轮2、独立悬挂系统3、高扭矩精密减速机4及伺服电机5构成。驱动轮组通过独立悬挂安装系统固定在AGV车架1下方。伺服电机5的输出轴与高扭矩精密减速机4通过齿轮传动连接,高扭矩精密减速机4的输出轴穿过独立悬挂系统3后与麦克纳姆轮2连接。
相对应的,支撑轮组包括支撑轮和独立悬挂系统,支撑轮通过独立悬挂系统安装在AGV车架的下部。
驱动轮组和支撑轮组中,都设计为独立悬挂,可增强对地面的适应性,避免打滑现象。多轮组合可以实现在二维平面内任意方向移动功能,包括前进、后退、左右横行、斜行、中心回转、任意曲线移动等全向移动形式。并且AGV运输车具备驻车制动功能,停车状态时能自动驻车。
如图3所示,顶升系统6由顶升气囊61和气囊罩壳62构成,采用顶升气囊61来实现整体底座的举升与下降入位。本实施例中,AGV车架上设置了六个顶升气囊61,顶升气囊61与AGV车架1通过螺栓固连。在底座单元底部与顶升气囊61的连接处有凹槽,顶升气囊61与底座单元无摩擦。该气囊在安装时设定整流罩调整系统的举升行程为110mm。当底座举升达到110mm行程时,气囊已处于最高伸长高度,气压足气囊具有较强的刚性。当AGV运输整流罩调整系统时,气囊需处于最大行程状态。当气囊放气下降时,气囊内气压降低,气囊内气不充足,因此具有一定程度的挠性,较软,可实现调姿平台单元的柔性入位。
AGV车架上还设有电力系统,电力系统包括蓄电池、逆变器及充电装置,蓄电池及逆变器安装在AGV车架内部,AGV车体的侧边预留充电装置的充电插座结构。
蓄电池可采用磷酸铁锂蓄电池组,用于为AGV车提供动力。电池组采用模块化设计,可以快速拆卸更换。并配备BMS系统,具备电池管理功能。逆变器将直流电源逆变为交流三相380V,为AGV电机驱动器供电。电力系统采用具有保护功能的充电装置,车体侧边预留充电插座的结构,内置4米长电缆卷盘装置,以实现电缆的可靠存储组成。车体上的卷管器、充电机、电池均为内置式布置。
本实施例中,控制系统采用德国SIEMENS公司的Simotion控制系统,具有稳压装置、漏电保护、断电保护和过载保护功能。并且采用德国SIEMENS公司的伺服驱动系统,基于Profinet现场总线,实现设备各轴运动控制,AGV车配备导航系统,行走平稳,具有启缓,缓停功能。行走顺畅、稳定且转向灵活;可实现车身直行、转弯、斜行及原地打转,并具备自动导航功能,具备协同运动功能和承载实时监测功能。而且AGV平台配置手持式操作单元,具有系统全向移动,速度,档位控制功能。既可实现自动导航模式下工作平台按指定路径移动,同时可人工通过遥控控制AGV运输车前进后退、左右横移和回转。
本实施例的导航系统采用视觉导航的模式,因此整个AGV具有自导引功能。导航系统由相机、镜头、光源、处理系统,导航彩带组成,可实现色带导引及二维码定位,在运动路径优化后,可按固定路径实现主起整流罩及集成化调整系统的运输,实现设备的自导引行驶。通过二维码,可以设置AGV的减速位置及停止位置,用于增加AGV的定位精度。
安全系统由安全触边7、安全扫描仪8及声光警示灯9组成。在车体对角安装有三色状态指示灯,在启动、运行过程中有连续的声、光警示作用,警示音量响亮,保证操作人员清晰可辨。车体四角及手持遥控器上均设置有急停开关,在紧急情况下,按下急停开关可使设备停止动作。车体四周装有安全触边7,遇阻后可输出信号,强制停车并发出警报。车体对角装有非接触式避障传感器,可实现360°全方位覆盖检测,区域的形状任意可设置,从而使车体在运动过程中可自动检测障碍物、自动减速并刹车,保证0.5m的安全距离,从而保证车体的安全。
利用上述基于AGV的主起整流罩调姿平台柔性入位装置的过程,包括以下步骤:
(1)AGV移动至调姿平台下方,顶升系统开始工作,顶升气囊上升到最大伸长高度,
(2)顶升气囊将调姿平台顶起脱离地面,通过导航系统规划的路径,控制系统控制驱动系统,使柔性入位装置装载着调姿平台行驶到定位点后停止行驶;
(3)顶升系统开始工作,多个顶升气囊同步开始放气,顶升气囊从最大伸长高度开始同步下降;顶升气囊放气下降过程中刚度下降,气囊在气不充足时具有一定程度的挠性,减轻调姿平台底座的定位销与定位底座配合时的冲击,以实现调姿平台柔性入位。
以上所述的实施例对本发明的技术方案和有益效果进行了详细说明,应理解的是以上所述仅为本发明的具体实施例,并不用于限制本发明,凡在本发明的原则范围内所做的任何修改、补充和等同替换,均应包含在本发明的保护范围之内。
- 一种基于AGV的主起整流罩调姿平台柔性入位装置及方法
- 十三自由度主被动柔顺调姿对接平台及其柔性对接方法