一种提高滑动导向钻进效率的顶驱主轴控制方法
文献发布时间:2023-06-19 11:50:46
技术领域
本发明涉及石油工程钻井技术领域,特别是一种提高滑动导向钻进效率的顶驱主轴控制方法。
背景技术
随着钻井技术的不断进步,以及油气勘探开发的需要,定向井、水平井以及大位移井钻井越来越多。采用弯螺杆(或弯接头)加随钻测量仪器(MWD)的滑动导向仍然是目前最常用的定向方式,其是在钻柱不旋转的情况下,仅依靠井底动力钻具带动钻头旋转破岩,通过滑动导向工具改变井眼的井斜角和方位角,从而控制井眼轨迹,但由于钻柱不旋转,钻柱与井壁之间为静摩擦,摩阻值高,容易托压,随着井斜角和水平位移的增加,滑动钻进的弊端愈加明显,主要表现在以下方面:(1)钻头难以保持恒定的钻压,导致机械钻速大幅下降,工具面不稳定,影响滑动钻进轨迹控制效果;(2)为了给钻头施加钻压,司钻需要过度释放钩载,操作不当发生憋泵,易损坏钻头、动力钻具等;(3)司钻需要频繁上提、下放钻具,释放钻具摩阻和扭矩,重新定向工具面,降低了滑动钻进效率。
为解决上述技术难题,国内外相继开展了滑动钻进中控制顶驱双向扭转钻柱降阻提速方法研究。经检索,CN101466911A公开了一种《摆动钻柱的装置和方法》,该专利其主要内容是包括如下步骤:(a)在第一方向上旋转所述钻柱,直到到达第一极限位置;(b)在第二方向上旋转所述钻柱,直到到达第二极限为止;所述第一和第二极限的基础在于旋转期间所施加能量的量值。该方法为在两个旋转方向上分别设定所施加的能量值来控制钻柱摆动幅度,由能量公式J=∫ωτdt可知,能量值与扭矩τ和摆动角速度ω两个参数相关,因而设定能量值摆动钻柱方法不科学,影响降阻效果。公开号为CN106050216A公开了《一种提高滑动钻进效率的顶驱扭摆减阻方法及装置》,该专利详细阐述了控制顶驱扭摆钻柱的正反向扭矩设定方法和相关装置,没有提及摆工具面、角度扭摆、以及扭摆工作中修正工具面等功能,难以满足滑动导向钻进工艺要求。公开号为CN108227495A公开了《一种具有自适应性的滑动导向钻井控制系统及控制方法》,该专利讲述的是如何根据设计工具面角与MWD实测工具面角的差值,实时控制顶驱的旋转,实现滑动导向钻井中井下工具面角自适应调整,没有提及通过控制顶驱正反向扭转钻柱降阻提速的方法。
以上述专利为代表的顶驱控制系统及方法,功能单一,难以满足水平井、大位移等复杂结构井滑动导向实际的工艺要求;且控制方法偏理论,与实际情况存在较大差距,实用性较差。
发明内容
本发明旨在针对上述现有技术所存在的缺陷和不足,提供一种功能齐全,更加高效、实用的提高滑动导向钻进效率的顶驱主轴控制方法。
本发明是通过以下技术方案实现的:
一种提高滑动导向钻进效率的顶驱主轴控制方法包括:
第一步:根据钻柱型号设定顶驱主轴正向扭转极限扭矩T
第二步:摆工具面,根据设计工具面与实际工具面的差值,按设定角度值控制顶驱主轴正反向扭转,将工具面调整到合适角度;
第三步:摆好工具面后,启动绞车下放钻柱的同时控制顶驱主轴正反双向扭转;当井深或水平位移不大时,按角度值双向扭转;当井深或水平位移较大时,按角度值或正反扭矩值双向扭转;
第四步:若在按角度值或正反扭矩值控制顶驱主轴正反双向扭转过程中,工具面发生漂移,与设计工具面相别较大时,控制顶驱主轴实时修正工具面;
第五步:滑动导向结束,或摩阻值较低无托压现象时,停止顶驱主轴扭转。
上述方案中进一步包括:
所述第一步中还包括设定摆工具面速度v
进一步的,所述摆工具面速度v
钻柱空载旋转最大扭矩T
所述第二步中摆工具面方法为:若设计工具面θ
进一步的,根据钻井工况及实钻数据分析,初设扭转角度值ψ,控制顶驱主轴从静止开始先正向旋转角度值ψ停止,然后反向旋转角度值2ψ停止,再正向旋转角度值2ψ,就这样一直在2ψ角度范围内正反双向扭转,直到停止,扭转速度为v
扭转角度值ψ实时调整方法为:
若实测工具面角θ
若井下实测工具面角θ
根据上述调整方法实时调整扭转角度值ψ,直到实测工具面角θ
所述第三步中按照正反扭矩值双向扭转的方法为:
根据实测的钻柱空载旋转最大扭矩T
顶驱主轴从静止开始首先正转,直到实际扭矩值达到T
正向扭转扭矩值T
若实测工具面角θ
若实测工具面角θ
若实测工具面角θ
若井下实测工具面角θ
根据上述调整方法实时调整正向扭转扭矩值T
所述第四步中,按设定角度值或正反扭矩值双向扭转过程中,工具面发生漂移,若设计工具面θ
按设定角度值ψ扭转过程中,修正工具面步骤为:
若θ
若θ
按设定扭矩值扭转过程中,修正工具面步骤为:
若θ
若θ
根据上述调整方法实时修正工具面直到实测工具面角θ
进一步的,当调整工具面角、按角度值或正反扭矩值双向扭转,或扭转过程中修正工具面时,当正向扭矩值T
本发明具有如下有益效果:
本发明的方法综合考虑了滑动导向的各种工况,具有精确控制摆工具面、按角度双向扭转、按扭矩双向扭转、以及在按角度或扭矩扭转过程中实时修正工具面等各种功能,满足大位移井、水平井等复杂结构井滑动定向工艺要求;同时该控制方法可操作性强,更加实用。按照该控制方法,在现场应用表明,滑动导向钻进中摩阻、扭矩平均降低50%以上,最高可达80%,平均机械钻速提高30%以上,降阻提速效果明显。
附图说明
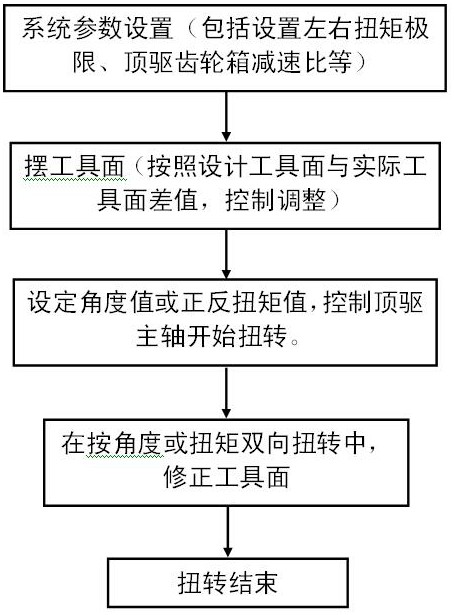
图1为本发明所述的控制方法的流程图。
图2为基于本发明所述的控制方法的顶驱主轴双向扭转控制系统人机交互界面。
具体实施方式
下面结合附图对本发明实施例中的技术方案进行详尽地描述。
本发明技术方案的工作原理为:在滑动导向过程中,通过该控制方法,按照设定角度或正反向扭矩值控制顶驱主轴双向扭转,顶驱主轴带动钻柱双向扭转,从而将钻柱与井壁之间的静摩擦变为动摩擦,从而大幅度降低摩阻;通过设定角度,可以精确控制顶驱旋转摆工具面,并可以在扭转过程中精确修正工具面,极大地提高了滑动导向钻进效率。
根据上述工作原理,本发明提供了一种提高滑动导向钻进效率的顶驱主轴控制方法,包括以下四项功能:精确控制顶驱主轴旋转摆工具面;按设定角度值ψ精确控制顶驱主轴正反双向扭转;按正向扭转扭矩值T
实施例1:
为了实现上述功能,给出一种提高滑动导向钻进效率的顶驱主轴控制方法包括:
第一步:根据钻柱型号设定顶驱主轴正向扭转极限扭矩T
第二步:摆工具面,根据设计工具面与实际工具面的差值,按设定角度值控制顶驱主轴正反向扭转,将工具面调整到合适角度;
第三步:摆好工具面后,启动绞车下放钻柱的同时控制顶驱主轴正反双向扭转;当井深或水平位移不大时,按角度值双向扭转;当井深或水平位移较大时,按角度值或正反扭矩值双向扭转;
第四步:若在按角度值或正反扭矩值控制顶驱主轴正反双向扭转过程中,工具面发生漂移,与设计工具面相别较大时,控制顶驱主轴实时修正工具面;
第五步:滑动导向结束,或摩阻值较低无托压现象时,停止顶驱主轴扭转。
其中:
所述第一步中还包括设定摆工具面速度v
进一步的,所述摆工具面速度v
钻柱空载旋转最大扭矩T
所述第二步中摆工具面方法为:若设计工具面θ
进一步的,根据钻井工况及实钻数据分析,初设扭转角度值ψ,控制顶驱主轴从静止开始先正向旋转角度值ψ停止,然后反向旋转角度值2ψ停止,再正向旋转角度值2ψ,就这样一直在2ψ角度范围内正反双向扭转,直到停止,扭转速度为v
扭转角度值ψ实时调整方法为:
若实测工具面角θ
若井下实测工具面角θ
根据上述调整方法实时调整扭转角度值ψ,直到实测工具面角θ
所述第三步中按照正反扭矩值双向扭转的方法为:
根据实测的钻柱空载旋转最大扭矩T
顶驱主轴从静止开始首先正转,直到实际扭矩值达到T
正向扭转扭矩值T
若实测工具面角θ
若实测工具面角θ
若实测工具面角θ
若井下实测工具面角θ
根据上述调整方法实时调整正向扭转扭矩值T
所述第四步中,按设定角度值或正反扭矩值双向扭转过程中,工具面发生漂移,若设计工具面θ
按设定角度值ψ扭转过程中,修正工具面步骤为:
若θ
若θ
按设定扭矩值扭转过程中,修正工具面步骤为:
若θ
若θ
根据上述调整方法实时修正工具面直到实测工具面角θ
进一步的,当调整工具面角、按角度值或正反扭矩值双向扭转,或扭转过程中修正工具面时,当正向扭矩值T
实施例2:
一种提高滑动导向钻进效率的顶驱主轴控制方法包括:
第一步:根据钻柱型号设定顶驱主轴正向扭转极限扭矩T
第二步:摆工具面,根据设计工具面与实际工具面的差值,按设定角度值控制顶驱主轴正反向扭转,将工具面调整到合适角度;
第三步:摆好工具面后,启动绞车下放钻柱的同时控制顶驱主轴正反双向扭转;当井深或水平位移不大时,按角度值双向扭转;当井深或水平位移较大时,按角度值或正反扭矩值双向扭转;
第四步:若在按角度值或正反扭矩值控制顶驱主轴正反双向扭转过程中,工具面发生漂移,与设计工具面相别较大时,控制顶驱主轴实时修正工具面;
第五步:滑动导向结束,或摩阻值较低无托压现象时,停止顶驱主轴扭转。
其中:
设定摆工具面速度v
设定正向扭转极限扭矩T
一般地,控制顶驱主轴旋转摆工具面速度v
控制顶驱主轴正反双向扭转速度v
钻柱空载旋转最大扭矩T
正向扭转极限扭矩T
正向扭转扭矩值T
一般地,井斜及水平位移较小时,T
一般地,若设计工具面θ
按设定角度值ψ控制顶驱主轴正反向扭转的步骤为:
根据钻井工况及实钻数据分析,初设角度ψ,控制顶驱主轴从静止开始先正向旋转角度ψ停止,然后反向旋转角度2ψ停止,再正向旋转角度2ψ,就这样一直在2ψ角度范围内正反双向扭转,直到停止,正反向扭转速度为v
扭转角度值ψ可以实时调整,调整原则为:
若实测工具面角θ
若井下实测工具面角θ
根据上述调整方法,直到实测工具面角θ
按设定扭矩值精确控制顶驱主轴正反双向扭转的方法为:
根据实测的钻柱空载旋转最大扭矩T
顶驱主轴从静止开始首先正转,直到实际扭矩值达到T
正向扭转扭矩值T
若实测工具面角θ
若实测工具面角θ
若实测工具面角θ
若井下实测工具面角θ
根据上述调整方法,直到实测工具面角θ
按设定角度值或扭矩值正反双向扭转过程中,若|θ
按设定角度值ψ扭转过程中,修正工具面步骤为:
若θ
若θ
按设定扭矩值扭转过程中,修正工具面步骤为:
若θ
若θ
当调整工具面角、按设定角度值或正反向扭矩值扭转,或扭转过程中修正工具面时,当正向扭矩值T
实施例3:
参照附图1的顶驱主轴控制方法的工艺流程图。具体实施流程如下:
第一步:系统参数设置,主要是根据钻柱型号设置顶驱主轴左右扭转的极限扭矩,并根据顶驱齿轮箱的结构设置减速比;
第二步:摆工具面,根据设计工具面与实际工具面的差值,控制顶驱旋转将工具面调整到合适角度;
第三步:摆好工具面后,启动绞车下放钻柱的同时控制顶驱主轴双向扭转。当井深或水平位移不大时,建议按设置角度值扭转;当井深或水平位移较大时,可按角度或正反扭矩值双向扭转;
第四步:若在按角度值或正反扭矩值扭转过程中,工具面发生漂移,与设计工具面相别较大时,实时修正工具面;
第五步:滑动导向结束,或摩阻值较低无托压现象时,停止顶驱主轴扭转作业。
附图2为基于本发明所述的顶驱主轴控制方法的顶驱主轴双向扭转控制系统人机交互界面,主要包括摆工具面、扭矩扭转,角度扭转,以及扭转过程中通过扭转冲撞来修正工具面等功能。具体控制方法说明如下:
摆工具面:摆工具面是按钻井工程设计进行准确导向的前提,是定向的必须步骤。比如,在定向某个井段,设计工具面θ
按设定扭矩值扭转:在某井实际定向过程中,当井深2637米,井斜60.4°时,滑动定向摩阻为12~16吨,摩阻较高,托压严重。此时在附图1的扭矩扭转一栏中,设置左旋扭矩为1600N.m,右旋扭矩为2300N.m,点击“扭转开始”按钮,控制钻柱按设定左右扭矩值双向扭转,扭转后摩阻降到4吨以内,降阻效果明显。需要结束扭转动作时,点击“扭转结束”按钮即可。
按设定角度值扭摆:在某井实际定向过程中,当井深2892米,井斜63.5°时,滑动定向摩阻为24吨,摩阻较高,托压严重。此时在附图1的角度扭转一栏中,设置旋转角度为500°,点击“扭转开始”按钮,控制钻柱按设定角度值双向扭转,左右扭转总幅度为1000°,实施角度扭转后摩阻降到4.5吨,降阻效果明显。需要结束扭转动作时,点击“扭转结束”按钮即可。
扭转冲撞:在按设定扭矩值或角度值左右双向扭转过程中,若实际工具面θ
以上具体实施方式,对本发明的技术方案和有益效果进行了进一步详细说明,所应指出的是,本发明所述的顶驱主轴的控制方法同样适用于电动转盘,以上仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种提高滑动导向钻进效率的顶驱主轴控制方法
- 一种提高滑动钻进效率的顶驱扭摆减阻方法及装置