一种半自主与定位的老人监护机器人及其系统
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及机器人领域,具体涉及一种半自主与定位的老人监护机器人及其系统。
背景技术
如今,老龄化水平不断提高,子女工作压力大,不能时刻陪伴在父母身边照顾,但老年人意外摔倒的现象常有发生,尤其是独居老人。据统计,摔倒已经成为中国65岁以上老年人因伤致死的首位原因,老年人意外摔倒后如能得到及时救助,可以有效降低80%的死亡风险和26%的住院长期治疗风险。而市面上也涌现出大量健康监测手环及家庭监控摄像头,但大多数摄像头只具备定点监测功能,对于像卫生间、卧室这种较私人的空间,存在监控死角;同时,现有摄像头缺乏智能化控制,不能及时准确查看,如:不具备自主触发以及由此引发的自主移动监测功能,用户意外摔倒导致生命体征出现异常后,不能自主触发并移动到其身边,近距离查看用户跌倒后所处的状态,需人为发现,以致于耽误最佳治疗时间;另外,现有监控摄像头也不具备照明功能,当用户意外摔倒后且所处环境较暗时,不能为周围环境补光以更准确地帮助监护人员判断用户的状态。综上所述,提出一种用户意外摔倒后,可自主触发并自主移动到用户身边,且近距离查看用户所处情况的机器人是有必要的,以此保障意外发生时用户的居家人身安全,在监护人员与被监护者之间筑起一座桥梁。
发明内容
本发明的目的在于克服现有技术的缺点与不足,提供一种半自主与定位的老人监护机器人及其系统,通过设置视觉识别模块和声音定位模块以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种半自主与定位的老人监护机器人,包括电源模块,机箱,还包括控制模块、底盘、视觉识别模块、网络通讯模块、声音定位模块、用于接收生命体征信息的蓝牙模块和总开关,所述底盘连接有三个全向移动轮系,所述视觉识别模块由摄像头、舵机、舵机固定块、同步照明灯和继电器组成;所述声音定位模块包括三个分贝传感器,六轴陀螺仪和霍尔编码器;所述分贝传感器设于机箱侧壁,且处于一平面,相互之间呈120°夹角;
所述蓝牙模块接收到生命体征异常信息后,分贝传感器将通过声音识别被监护者的位置,控制模块控制机器人前往被监护者所处位置,视觉识别模块自动识别被监护者的所处环境,摄像头进行俯仰角对其进行近距离查看;当周围环境光线不足时,视觉识别模块中的照明功能将启动,与摄像头进行同步俯仰,达到光线聚焦的目的,使监护人员更清晰地通过视觉识别模块查看被监护者的状态;
优选的,所述视觉识别模块、声音定位模块和网络通讯模块实现远程监控功能,其中,三个分贝传感器监测老人呼救方位,将世界角度平均分为120度,以此判断跌落时发出的微弱声音或呼救声,以多个传感器融合的方式,全方位监测与分析声音来向,传入到单片机后,与六轴陀螺仪的偏航角进行数据比对融合,从而将机器人坐标转化为老人所在的世界坐标偏航角,信息进一步处理后,进行底盘运动学解算。
优选的,所述六轴陀螺仪与分贝传感器数据进行融合运算,其中分贝传感器感知老人摔倒位置的分贝突变世界方位,六轴陀螺仪作为机器人坐标与世界坐标转换的介媒,以此达到老人跌倒位置到机器人角度的转换;
优选的,所述同步照明灯与所述摄像头相固定,以实现光线与摄像头角度的同步俯仰;
优选的,所述三个全向移动轮系在同一平面且相互之间呈120°夹角,底盘的下表面与所述全向轮系最低点距离为43mm;
优选的,所述视觉识别模块通过固定支架安装在机箱的侧壁上,并与底盘平面呈60°~120°夹角,视觉识别模块的中心点与所述底盘上表面距离为134mm;
优选的,所述同步照明灯采用多个12V LED灯串联;
优选的,所述继电器用于触发控制同步照明灯,减低机器人功耗;
作为一种优选的方案,所述霍尔编码器安装在电机末端,用作计算运动控制解算中的速度与位移数据;
作为一种优选的方案,所述分贝传感器的最低点与所述底盘固定块上表面距离为42mm;
作为一种优选的方案,所述总开关安装在机箱的顶部,总开关顶部与所述底盘上表面距离为192mm;
基于上述提供的一种半自主与定位的老人监护机器人,本发明还提供一种半自主与定位的老人监护机器人系统,包括一种半自主与定位的老人监护机器人,所述机器人为上述任一项所述的机器人,还包括主动控制唤醒方式、被动控制唤醒方式和手环通讯方式;
所述主动控制唤醒方式是在机器人端的算法自主控制,在算法中结合了分贝信息与偏航角信息,在空旷空间的自主方位定向,以此达到自主导航的目的,其中,三个分贝传感器监测老人呼救方位,将世界角度平均分为120度,以此判断跌落时发出的微弱声音或呼救声,以多个传感器融合的方式,全方位监测与分析声音来向,传入到单片机后,与陀螺仪的偏航角进行数据比对与融合,从而将机器人坐标转化为老人所在的世界坐标偏航角,信息进一步处理后,进行底盘运动学解算;
所述被动控制唤醒方式以网络作为介媒,用手机与机器人上的网络通讯模块进行数据交互,既进行手机单方面控制信号的输出,机器人也将健康信息传输到手机端,以此进行数据整合与处理;
移动动控制中,全向移动底盘控制使用传统运动解算,在接收来自分贝定位系统中的信号,使用PID角度环控制的方式,以分贝定位系统数据作为输入,角度环作为闭环控制算法,实际偏航角与输入的差作为系统误差作为反馈,最后得出闭环系统的离散输出,输入到全向轮运动解算当中,得出底层中各个电机的运动输出,从而达到机器人自主移动至老人摔倒或呼喊位置;
所述手环通讯方式选用了补码浮点数据储存与自定义通讯协议方式,将手环中老人的心率信息进行补码拆解成四个十六进制可传输式数据,自定义十六进制帧头帧尾将数据包装起来,最终传输到机器人端进行数据接收与解包,再由机器人作为中间介媒,与手机进行数据交互。
本发明工作流程:
被监护者意外摔倒后,蓝牙模块会接收到生命体征的异常信息,分贝传感器将通过声音识别被监护者的位置,控制模块控制机器人前往被监护者所处位置,视觉识别模块会自动识别被监护者所处环境,摄像头进行俯仰角对其进行近距离查看;当周围环境光线不足时,视觉识别模块中的照明功能将启动,与摄像头进行同步俯仰,达到光线聚焦的目的,使监护人员更清晰地通过视觉识别模块查看被监护者的状态。
与现有技术相比,本发明的有益效果为:
1.本发明中,通过设置声音定位模块,机器人中的分贝传感器通过识别被监护者的求救声音,结合主动触发与被动触发的唤醒方式,使机器人自动前往被监护者所处位置,保证被监护者发生意外摔倒后迅速移到其身边,避免错过最佳的治疗时机;
2.本发明中,通过设置视觉识别模块,当机器人自动前往被监护者所处位置后,视觉识别模块能自动识别被监护者所处环境,摄像头可进行俯仰角对其进行近距离查看;当周围环境较暗时,视觉识别模块中的照明功能将启动,与摄像头进行同步俯仰,达到光线聚焦的目的,使监护人员可以更清晰地通视觉识别模块查看被监护者的状态;
3.本发明中,通过设置主动控制唤醒方式、被动控制唤醒方式和手环通讯方式,使机器人根据数据分析自动且准确的前往被监护者所处位置,实现机器人与其他终端设备数据交互,监护人员通过终端设备实时观察到被监护者的生命体征信息,对其进行相应的监护调整。
附图说明
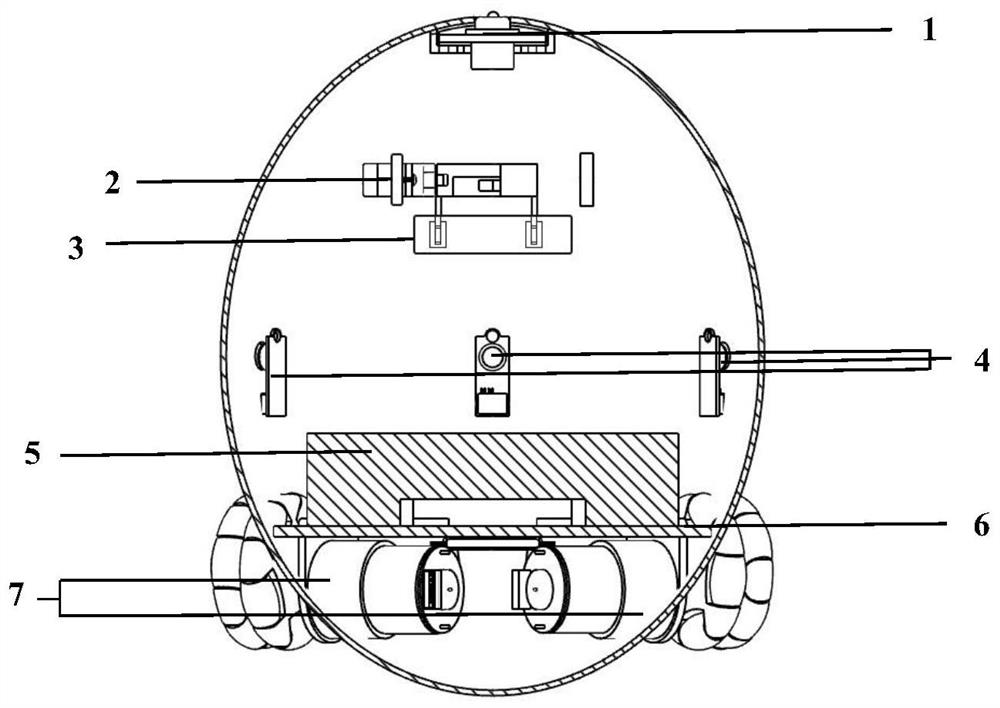
图1为本发明整体结构示意图;
图2为本发明横向剖面示意图;
图3为本发明内部结构示意图;
图4为本发明软件架构示意图;
图5为本发明主动控制唤醒方式软件架构示意图;
图6为本发明被动控制唤醒方式软件架构示意图;
图7为本发明移动动控制软件架构示意图;
图中:1、总开关;2、视觉识别模块;3、同步照明灯;4、分贝传感器;5、控制模块;6、底盘;7、全向移动轮系;8、电源模块。
具体实施方式
下面结合实施例及附图对本发明作进一步详细的描述,但本发明的实施方式不限于此。
请参阅图1-7,本发明提供一种技术方案:
一种半自主与定位的老人监护机器人,包括电源模块8,机箱,还包括控制模块5、底盘6、视觉识别模块2、网络通讯模块、声音定位模块、用于接收生命体征信息的蓝牙模块和总开关1,所述底盘6连接有三个全向移动轮系,所述视觉识别模块2由摄像头、舵机、舵机固定块、同步照明灯3和继电器组成;所述声音定位模块包括三个分贝传感器4,六轴陀螺仪和霍尔编码器;所述分贝传感器4设于机箱侧壁,且处于一平面,相互之间呈120°夹角;
所述蓝牙模块接收到生命体征异常信息后,分贝传感器4将通过声音识别被监护者的位置,控制模块5控制机器人前往被监护者所处位置,视觉识别模块2自动识别被监护者的所处环境,摄像头进行俯仰角对其进行近距离查看;当周围环境光线不足时,视觉识别模块2中的照明功能将启动,与摄像头进行同步俯仰,达到光线聚焦的目的,使监护人员更清晰地通过视觉识别模块2查看被监护者的状态;
本发明中,通过设置声音定位模块,机器人中的分贝传感器4通过识别被监护者的求救声音,结合主动触发与被动触发的唤醒方式,使机器人自动前往被监护者所处位置,保证被监护者发生意外摔倒后迅速移到其身边,避免错过最佳的治疗时机;通过设置视觉识别模块2,当机器人自动前往被监护者所处位置后,视觉识别模块2能自动识别被监护者所处环境,摄像头可进行俯仰角对其进行近距离查看;当周围环境较暗时,视觉识别模块2中的照明功能将启动,与摄像头进行同步俯仰,达到光线聚焦的目的,使监护人员可以更清晰地通视觉识别模块2查看被监护者的状态;
所述视觉识别模块2、声音定位模块和网络通讯模块实现远程监控功能,其中,三个分贝传感器4监测老人呼救方位,将世界角度平均分为120度,以此判断跌落时发出的微弱声音或呼救声,以多个传感器融合的方式,全方位监测与分析声音来向,传入到单片机后,与六轴陀螺仪的偏航角进行数据比对融合,从而将机器人坐标转化为老人所在的世界坐标偏航角,信息进一步处理后,进行底盘6运动学解算;所述六轴陀螺仪与分贝传感器4数据进行融合运算,其中分贝传感器4感知老人摔倒位置的分贝突变世界方位,六轴陀螺仪作为机器人坐标与世界坐标转换的介媒,以此达到老人跌倒位置到机器人角度的转换;所述同步照明灯3与所述摄像头相固定,以实现光线与摄像头角度的同步俯仰;所述三个全向移动轮系在同一平面且相互之间呈120°夹角,底盘6的下表面与所述全向轮系最低点距离为43mm;所述视觉识别模块2通过固定支架安装在机箱的侧壁上,并与底盘6平面呈60°~120°夹角,视觉识别模块2的中心点与所述底盘6上表面距离为134mm,所述同步照明灯3采用多个12V LED灯串联;所述继电器用于触发控制同步照明灯3,减低机器人功耗;
所述霍尔编码器安装在电机末端,用作计算运动控制解算中的速度与位移数据;利用霍尔传感器在电机后的从动关系,单片机通过读取单位时间的脉冲,再通过半径公式转换,得出单个轮子的转速,通过运动解算,便可以实现对全向轮移动底盘6的机器人坐标下的x,y轴方位速度控制。
所述分贝传感器4的最低点与所述底盘6固定块上表面距离为42mm;所述总开关1安装在机箱的顶部,总开关1顶部与所述底盘6上表面距离为192mm;
基于上述提供的一种半自主与定位的老人监护机器人,本发明还提供一种半自主与定位的老人监护机器人系统,包括一种半自主与定位的老人监护机器人,所述机器人为上述任一项所述的机器人,还包括主动控制唤醒方式、被动控制唤醒方式和手环通讯方式;
如图5所示,所述主动控制唤醒方式是在机器人端的算法自主控制,在算法中结合了分贝信息与偏航角信息,在空旷空间的自主方位定向,以此达到自主导航的目的,其中,三个分贝传感器4监测老人呼救方位,将世界角度平均分为120度,以此判断跌落时发出的微弱声音或呼救声,以多个传感器融合的方式,全方位监测与分析声音来向,传入到单片机后,与陀螺仪的偏航角进行数据比对与融合,从而将机器人坐标转化为老人所在的世界坐标偏航角,信息进一步处理后,进行底盘6运动学解算;
如图6所示,所述被动控制唤醒方式以网络作为介媒,用手机与机器人上的网络通讯模块进行数据交互,既进行手机单方面控制信号的输出,机器人也将健康信息传输到手机端,以此进行数据整合与处理;
如图7所示,移动动控制中,全向移动底盘6控制使用传统运动解算,在接收来自分贝定位系统中的信号,使用PID角度环控制的方式,以分贝定位系统数据作为输入,角度环作为闭环控制算法,实际偏航角与输入的差作为系统误差作为反馈,最后得出闭环系统的离散输出,输入到全向轮运动解算当中,得出底层中各个电机的运动输出,从而达到机器人自主移动至老人摔倒或呼喊位置;
所述手环通讯方式选用了补码浮点数据储存与自定义通讯协议方式,将手环中老人的心率信息进行补码拆解成四个十六进制可传输式数据,自定义十六进制帧头帧尾将数据包装起来,最终传输到机器人端进行数据接收与解包,再由机器人作为中间介媒,与手机进行数据交互。
本发明中,通过设置主动控制唤醒方式、被动控制唤醒方式和手环通讯方式,使机器人根据数据分析自动且准确的前往被监护者所处位置,实现机器人与其他终端设备数据交互,监护人员通过终端设备实时观察到被监护者的生命体征信息,对其进行相应的监护调整。
本发明工作流程:
被监护者意外摔倒后,蓝牙模块会接收到生命体征的异常信息,分贝传感器4将通过声音识别被监护者的位置,控制模块5控制机器人前往被监护者所处位置,视觉识别模块2会自动识别被监护者所处环境,摄像头进行俯仰角对其进行近距离查看;当周围环境光线不足时,视觉识别模块2中的照明功能将启动,与摄像头进行同步俯仰,达到光线聚焦的目的,使监护人员更清晰地通过视觉识别模块2查看被监护者的状态。
上述为本发明较佳的实施方式,但本发明的实施方式并不受上述内容的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
- 一种半自主与定位的老人监护机器人及其系统
- 一种半自主与定位的老人监护机器人及其系统