具有可调节的压缩阻尼和回弹阻尼的车辆
文献发布时间:2023-06-19 11:57:35
相关申请的交叉引用
本申请是国际申请,其要求于2018年11月21日提交的题目为“VEHICLE HAVINGADJUSTABLE COMPRESSION AND REBOUND DAMPING(具有可调节的压缩阻尼和回弹阻尼的车辆)”的美国申请No.16/198,280的优先权,该美国申请的全部内容通过参引并入本文中。
技术领域
本公开涉及用于车辆的改进的悬架特性,并且特别地,涉及用于减震器的比如压缩阻尼和/或回弹阻尼之类的阻尼控制的系统和方法。
背景技术
可调节减震器是已知的。在美国公开的专利申请No.2016/0059660(于2015年11月6日提交,题目为“VEHICLE HAVING SUSPENSION WITH CONTINUOUS DAMPING CONTROL(具有带有连续阻尼控制的悬架的车辆)”)和美国公开的申请2018/0141543(于2017年11月17日提交,题目为“VEHICLE HAVING ADJUSTABLE SUSPENSION(具有可调节悬架的车辆)”)中公开了用于对可调节减震器的一个或更多个可调节特性进行控制的系统和方法。
发明内容
在本公开的示例性实施方式中,提供了一种休闲车辆。该休闲车辆包括多个地面接合构件、由所述多个地面接合构件支承的框架、多个悬架、多个可调节减震器、定位在休闲车辆上并且被配置成向控制器提供传感器信息的至少一个传感器以及操作性地联接至传感器和所述多个可调节减震器的控制器。悬架中的每个悬架将地面接合构件联接至框架。控制器被配置成:从传感器接收传感器信息,基于传感器信息确定与休闲车辆执行转弯有关的拐弯事件,并且基于拐弯事件向所述多个可调节减震器中的至少一个可调节减震器提供用以导致所述多个可调节减震器中的所述至少一个可调节减震器的阻尼特性的降低的一个或更多个命令。
在一些情况下,控制器被配置成:基于传感器信息确定与拐弯事件相对应的转弯的方向,基于转弯的方向确定所述多个可调节减震器中的至少一个内部可调节减震器,并且向所述至少一个内部可调节减震器提供用以导致压缩阻尼特性的降低和回弹阻尼特性的增加的一个或更多个命令。在一些示例中,所述至少一个传感器包括惯性测量单元(IMU),传感器信息包括指示横向加速度值的加速度信息,并且控制器被配置成通过基于将横向加速度值与第一阈值进行比较来确定休闲车辆正在转弯而确定拐弯事件。
在一些变型中,传感器信息还包括指示横摆率的横摆率信息。控制器还被配置成通过基于将横摆率与第二阈值进行比较来确定休闲车辆正在转弯而确定拐弯事件。在一些情况下,所述至少一个传感器还包括转向传感器,并且传感器信息还包括指示与方向盘相对应的转向位置或转向率的转向信息。此外,控制器被配置成通过基于将转向位置与第三阈值进行比较来确定休闲车辆正在转弯而确定拐弯事件。
在一些变型中,传感器信息包括指示横摆率的横摆率信息和指示转向位置或转向率的转向信息。控制器还被配置成:使横摆率信息优先于转向信息,使得控制器被配置成:即使转向位置或转向率指示转弯在第二方向上或不指示转弯,也基于横摆率指示转弯在第一方向上来确定车辆正在第一方向上执行转弯。在一些情况下,传感器信息包括指示横向加速度值的加速度信息和指示横摆率的横摆率信息。控制器还被配置成:使加速度信息优先于横摆率信息,使得控制器被配置成:即使横摆率指示转弯在第二方向上或不指示转弯,也基于横向加速度值指示转弯在第一方向上来确定车辆正在第一方向上执行转弯。在一些示例中,传感器信息包括指示转向位置或转向率的转向信息和指示横向加速度值的加速度信息。控制器还被配置成:使加速度信息优先于转向信息,使得控制器被配置成:即使转向位置或转向率指示转弯在第二方向上或不指示转弯,也基于横向加速度值指示转弯在第一方向上来确定车辆正在第一方向上执行转弯。
在本公开的另一示例性实施方式中,提供了一种休闲车辆。该休闲车辆包括多个地面接合构件、由所述多个地面接合构件支承的框架、多个悬架、多个可调节减震器、定位在休闲车辆上并且被配置成向控制器提供拐弯信息的第一传感器、定位在休闲车辆上并且被配置成向控制器提供加速度信息的第二传感器以及操作性地联接至传感器和所述多个可调节减震器的控制器。悬架中的每个悬架将地面接合构件联接至框架。控制器被配置成:从第一传感器接收拐弯信息,从第二传感器接收加速度信息,基于拐弯信息确定与休闲车辆执行转弯相对应的拐弯事件,基于加速度信息确定休闲车辆在转弯期间的位置,并且基于拐弯事件和休闲车辆在转弯期间的位置向所述多个可调节减震器中的所述至少一个可调节减震器提供用以导致对所述多个可调节减震器中的所述至少一个可调节减震器的阻尼特性的调节的一个或更多个命令。
在一些情况下,第二传感器是加速度计或IMU。在一些示例中,控制器被配置成通过基于指示纵向减速度的加速度信息来确定车辆正在进入转弯而确定休闲车辆在转弯期间的位置。此外,控制器还被配置成:基于拐弯事件确定所述多个可调节减震器的多个阻尼特性,基于确定车辆正在进入转弯而对所述多个阻尼特性进行偏置,并且基于多个经偏置的阻尼特性生成所述一个或更多个命令。在一些情况下,控制器被配置成:通过另外地增加所述多个可调节减震器中的前部可调节减震器的压缩阻尼以及另外地降低所述多个可调节减震器中的后部可调节减震器的压缩阻尼来对所述多个阻尼特性进行偏置。在一些示例中,控制器被配置成:通过另外地增加所述多个可调节减震器中的后部可调节减震器的回弹阻尼以及另外地降低所述多个可调节减震器中的前部可调节减震器的回弹阻尼来对所述多个阻尼特性进行偏置。
在一些情况下,控制器被配置成通过基于指示纵向加速度的加速度信息来确定车辆正在退出转弯而确定休闲车辆在转弯期间的位置。此外,控制器还被配置成:基于拐弯事件确定所述多个可调节减震器的多个阻尼特性,基于确定车辆正在退出转弯而对所述多个阻尼特性进行偏置,并且基于多个经偏置的阻尼特性生成所述一个或更多个命令。在一些示例中,控制器被配置成:通过另外地增加所述多个可调节减震器中的后部可调节减震器的压缩阻尼以及另外地降低所述多个可调节减震器中的前部可调节减震器的压缩阻尼来对所述多个阻尼特性进行偏置。在一些变型中,控制器被配置成:通过另外地增加所述多个可调节减震器中的前部可调节减震器的回弹阻尼以及另外地降低所述多个可调节减震器中的后部可调节减震器的回弹阻尼来对所述多个阻尼特性进行偏置。
在本公开的另一示例性实施方式中,提供了一种休闲车辆。该休闲车辆包括多个地面接合构件、由所述多个地面接合构件支承的框架、多个悬架、多个可调节减震器、定位在休闲车辆上并且被配置成向控制器提供传感器信息的传感器以及操作性地联接至传感器和所述多个可调节减震器的控制器。悬架中的每个悬架将地面接合构件联接至框架。控制器被配置成:从传感器接收传感器信息,基于传感器信息确定与休闲车辆相对应的制动事件,并且基于制动事件向所述多个可调节减震器中的至少一个可调节减震器提供用以减少所述多个可调节减震器中的所述至少一个可调节减震器的阻尼特性的一个或更多个命令。
在一些情况下,控制器被配置成提供用以减少所述多个可调节减震器中的所述至少一个可调节减震器的回弹阻尼特性的一个或更多个命令。在一些示例中,控制器被配置成提供用以减少所述多个可调节减震器中的所述至少一个可调节减震器的压缩阻尼特性的一个或更多个命令。在一些变型中,传感器是制动器传感器,并且传感器信息是指示制动器踏板的致动的信息。在一些情况下,控制器被配置成向所述多个可调节减震器中的前部可调节减震器提供用以增加压缩阻尼特性以及用以减少回弹阻尼特性的命令。在一些示例中,控制器被配置成向所述多个可调节减震器中的后部可调节减震器提供用以增加回弹阻尼特性以及用以减少压缩阻尼特性的命令。
在本公开的另一示例性实施方式中,提供了一种休闲车辆。该休闲车辆包括多个地面接合构件、由所述多个地面接合构件支承的框架、多个悬架、多个可调节减震器、定位在休闲车辆上并且被配置成向控制器提供制动信息的第一传感器、定位在休闲车辆上并且被配置成提供加速度信息的第二传感器以及操作性地联接至传感器和所述多个可调节减震器的控制器。悬架中的每个悬架将地面接合构件联接至框架。控制器被配置成:从第一传感器接收制动信息,从第二传感器接收加速度信息,基于制动信息确定与休闲车辆相对应的制动事件,基于加速度信息确定来自所述多个可调节减震器的可调节减震器的阻尼特性减小的量,并且基于拐弯事件向可调节减震器提供用以将前部可调节减震器的阻尼特性调节至所确定的量的一个或更多个第一命令。
在一些情况下,第二传感器是加速度计,并且加速度信息指示休闲车辆的纵向减速度。在一些示例中,第二传感器是惯性测量单元(IMU),并且加速度信息指示休闲车辆的纵向减速度。在一些变型中,第二传感器是制动器传感器,并且加速度信息指示休闲车辆的纵向减速度。在一些情况下,可调节减震器是定位在休闲车辆的后部部分处的减震器。
在一些变型中,控制器被配置成:基于加速度信息确定减速度值,并且响应于确定减速度值低于第一阈值而维持可调节减震器的压缩阻尼。在一些示例中,控制器被配置成:基于加速度信息确定减速度值;响应于确定减速度值大于第一阈值且低于第二阈值而将可调节减震器的压缩阻尼减小至第一值;以及响应于确定减速度值大于第一阈值和第二阈值而将可调节减震器的压缩阻尼减小至第二值,其中,第二值低于第一值。
在本公开的另一示例性实施方式中,提供了一种休闲车辆。该休闲车辆包括多个地面接合构件、由所述多个地面接合构件支承的框架、多个悬架、多个可调节减震器、定位在休闲车辆上并且被配置成向控制器提供空中信息和着陆信息的传感器以及操作性地联接至传感器和所述多个可调节减震器的控制器。悬架中的每个悬架将地面接合构件联接至框架。控制器被配置成:从传感器接收空中信息;基于空中信息来确定指示休闲车辆在空中的空中事件;基于空中事件来提供用以导致所述多个可调节减震器的回弹阻尼特性从离地前回弹值降低至自由降落回弹值的一个或更多个第一命令;从所述至少一个传感器接收着陆信息;基于着陆信息来确定指示休闲车辆在空中事件之后已经着陆的着陆事件;基于空中事件和着陆事件来确定休闲车辆在空中的持续时间;基于着陆事件和休闲车辆在空中的持续时间来提供用以导致所述多个可调节减震器的回弹阻尼特性从自由降落回弹值增加至着陆后回弹值以防止着陆跳动的一个或更多个第二命令;以及提供用以导致所述多个可调节减震器的回弹阻尼特性从着陆后回弹值降低至离地前回弹值的一个或更多个第三命令。
在一些情况下,传感器是加速度计或IMU。在一些示例中,传感器是惯性测量单元(IMU)。在一些变型中,所述一个或更多个第三命令使所述多个可调节减震器的回弹阻尼特性从着陆后回弹值逐渐降低至离地前回弹值。在一些示例中,控制器还被配置成:使着陆后回弹值随着休闲车辆在空中的持续时间增加而增加。在一些变型中,控制器还被配置成:响应于确定持续时间低于第一阈值而将着陆后回弹值设定为与离地前回弹值相同的值。在一些情况下,所述控制器还被配置成:响应于确定持续时间低于第一阈值而将所述多个可调节减震器中的前部减震器的着陆后回弹值偏置成与所述多个可调节减震器中的后部减震器的着陆后回弹值不同;并且基于对着陆后回弹值的偏置来生成所述一个或更多个第二命令。在一些情况下,控制器被配置成通过另外地增加前部减震器的着陆后回弹值来偏置着陆后回弹值。
在一些示例中,控制器被配置成:基于空中事件来提供用以导致所述多个可调节减震器的压缩阻尼特性从离地前压缩值逐渐增加至着陆后压缩值的一个或更多个第四命令;基于着陆事件和持续时间来提供用以导致将所述多个可调节减震器的压缩阻尼特性维持在着陆后压缩值的一个或更多个第五命令;并且提供用以导致所述多个可调节减震器的压缩阻尼特性从着陆后压缩值降低至离地前压缩值的一个或更多个第六命令。在一些情况下,控制器还被配置成:响应于确定持续时间低于第一阈值而将着陆后压缩值设定为与离地前压缩值相同的值。在一些示例中,控制器还被配置成:响应于确定持续时间低于第一阈值而将所述多个可调节减震器中的前部减震器的着陆后压缩值偏置成与所述多个可调节减震器中的后部减震器的着陆后压缩值不同,并且基于对着陆后压缩值的偏置来生成所述一个或更多个第五命令。在一些变型中,控制器还被配置成:响应于确定持续时间低于第一阈值而将所述多个可调节减震器中的前部减震器的着陆后压缩值偏置成与所述多个可调节减震器中的后部减震器的着陆后压缩值不同,并且基于对着陆后压缩值的偏置来生成所述一个或更多个第五命令。在一些示例中,自由降落回弹值大致为零。
在本公开的另一示例性实施方式中,提供了一种休闲车辆。该休闲车辆包括多个地面接合构件、由所述多个地面接合构件支承的框架、多个悬架、多个可调节减震器、定位在休闲车辆上并且被配置成向控制器提供加速度信息的传感器以及操作性地联接至传感器和所述多个可调节减震器的控制器。悬架中的每个悬架将地面接合构件联接至框架。控制器被配置成:从所述至少一个传感器接收加速度信息;基于加速度信息来确定车辆的取向;并且基于车辆的取向来向所述多个可调节减震器中的至少一个可调节减震器提供用以导致对所述多个可调节减震器中的所述至少一个可调节减震器的阻尼特性的调节的一个或更多个命令。
在一些情况下,传感器是加速度计或IMU。在一些示例中,传感器是IMU。在一些变型中,休闲车辆还包括操作者界面,该操作者界面被配置成向控制器提供指示模式选择的一个或更多个用户输入。控制器被配置成:基于从操作者界面接收指示对攀爬模式的选择的用户输入来提供用以导致阻尼特性的调节的一个或更多个命令。在一些示例中,所述至少一个传感器包括第二传感器,该第二传感器被配置成向控制器提供车辆速度信息。控制器还被配置成:从第二传感器接收指示休闲车辆的车辆速度的车辆速度信息;并且响应于确定车辆速度大于阈值而将车辆从攀爬模式转换到不同的操作模式。
在一些变型中,控制器还被配置成:基于加速度信息来确定休闲车辆的纵向加速度和横向加速度;基于纵向加速度和横向加速度来确定休闲车辆的俯仰角和侧倾角,并且控制器被配置成基于俯仰角和侧倾角来确定休闲车辆的取向。在一些示例中,控制器被配置成:基于纵向加速度和横向加速度来确定休闲车辆的取向处于平坦地面上;并且基于确定休闲车辆处于平坦地面上来提供用以导致所述多个可调节减震器中的所述至少一个可调节减震器的压缩阻尼特性的增加和回弹阻尼特性的降低的一个或更多个命令。
在一些情况下,控制器被配置成:基于纵向加速度和横向加速度来确定来自所述多个可调节减震器的至少一个上坡可调节减震器和至少一个下坡可调节减震器;并且向所述至少一个上坡可调节减震器提供用以导致回弹阻尼特性的增加和压缩阻尼特性的降低的一个或更多个命令。在一些示例中,控制器还被配置成:基于纵向加速度和横向加速度来确定来自所述多个可调节减震器的至少一个上坡可调节减震器和至少一个下坡可调节减震器;并且向所述至少一个下坡可调节减震器提供用以导致压缩阻尼特性的增加的一个或更多个命令。
在本公开的另一示例性实施方式中,提供了一种休闲车辆。该休闲车辆包括多个地面接合构件、由所述多个地面接合构件支承的框架、多个悬架、多个可调节减震器、定位在休闲车辆上并且被配置成向控制器提供传感器信息的传感器以及操作性地联接至传感器和所述多个可调节减震器的控制器。悬架中的每个悬架将地面接合构件联接至框架。控制器被配置成:从所述至少一个传感器接收传感器信息;基于传感器信息来确定与休闲车辆在穿越斜坡时滑动相对应的滑动事件;并且基于对滑动事件的确定来向所述多个可调节减震器中的至少一个可调节减震器提供用以导致对所述多个可调节减震器中的所述至少一个可调节减震器的阻尼特性进行调节的一个或更多个命令。
在一些情况下,所述至少一个传感器包括惯性测量单元(IMU)。此外,传感器信息包括指示横向加速度值的加速度信息。控制器被配置成通过基于将横向加速度值与第一阈值进行比较来确定休闲车辆正在滑动而确定滑动事件。在一些示例中,传感器信息还包括指示横摆率的横摆率信息。控制器还被配置成基于横摆率来确定拐弯。在一些变型中,传感器信息包括指示横向加速度值的加速度信息和指示横摆率的横摆率信息。控制器还被配置成使加速度信息优先于横摆率信息,使得控制器被配置成:即使横摆率未超过第二阈值,也基于横向加速度值超过第一阈值来确定车辆在穿越斜坡时正在滑动。
在一些情况下,传感器信息包括指示转向位置或转向率的转向信息和指示横向加速度值的加速度信息。控制器还被配置成使加速度信息优先于转向信息,使得控制器被配置成:即使转向位置或转向率未超过第二阈值,也基于横向加速度值超过第一阈值来确定车辆在穿越斜坡时正在滑动。在一些变型中,传感器信息指示横向加速度。控制器还被配置成:基于横向加速度来确定与滑动事件相对应的滑动的方向;基于滑动的方向来确定所述多个可调节减震器中的至少一个前面的可调节减震器,并且控制器被配置成通过向所述至少一个前面的可调节减震器提供用以导致压缩阻尼特性的增加和回弹阻尼特性的降低的一个或更多个命令来提供所述一个或更多个命令。
在一些示例中,传感器信息指示横向加速度。控制器还被配置成:基于横向加速度来确定与滑动事件相对应的滑动的方向;基于滑动的方向来确定所述多个可调节减震器中的至少一个后面的可调节减震器,并且控制器被配置成通过向所述至少一个后面的可调节减震器提供用以导致压缩阻尼特性的降低和回弹阻尼特性的增加的一个或更多个命令来提供所述一个或更多个命令。在一些变型中,传感器信息指示纵向加速度。控制器还被配置成:基于纵向加速度来确定车辆的取向;基于车辆的取向来确定所述多个可调节减震器的多个阻尼特性;基于车辆的取向来对所述多个阻尼特性进行偏置;并且基于多个经偏置的阻尼特性生成所述一个或更多个命令。
在一些情况下,控制器被配置成通过另外地增加所述多个可调节减震器中的下坡可调节减震器的压缩阻尼以及另外地降低所述多个可调节减震器中的上坡可调节减震器的压缩阻尼来对所述多个阻尼特性进行偏置。在一些示例中,控制器被配置成通过另外地增加所述多个可调节减震器中的上坡可调节减震器的回弹阻尼来对所述多个阻尼特性进行偏置。
在本公开的另一示例性实施方式中,提供了一种用于调节在包括至少一个沙丘的地形上行驶的休闲车辆的多个可调节减震器的方法和车辆。例如,该方法和车辆基于车辆的纵向加速度来确定休闲车辆的取向,基于车辆的横向加速度来确定休闲车辆的滑动,基于休闲车辆的取向和滑动来检测休闲车辆正在滑动越过沙丘,并且在休闲车辆继续越过沙丘时对所述多个可调节减震器的至少一个阻尼特性进行调节,以使休闲车辆转弯到沙丘中。
在一些情况下,该方法和车辆基于滑动来确定所述多个可调节减震器中的至少一个前面的可调节减震器和至少一个后面的可调节减震器,并且向所述至少一个前面的可调节减震器提供用以导致压缩阻尼特性的增加和回弹阻尼特性的降低的一个或更多个命令。在一些示例中,该方法和车辆基于滑动来确定所述多个可调节减震器中的至少一个前面的可调节减震器和至少一个后面的可调节减震器,并且向所述至少一个后面的可调节减震器提供用以导致回弹阻尼特性的增加和压缩阻尼特性的降低的一个或更多个命令。
在一些变型中,该方法和车辆基于取向来确定所述多个可调节减震器中的至少一个上坡可调节减震器和至少一个下坡可调节减震器,并且向所述至少一个上坡可调节减震器提供用以导致压缩阻尼特性的增加的一个或更多个命令。在一些情况下,该方法和车辆基于取向来确定所述多个可调节减震器中的至少一个上坡可调节减震器和至少一个下坡可调节减震器,并且向所述至少一个下坡可调节减震器提供用以导致回弹阻尼特性的增加和压缩阻尼特性的降低的一个或更多个命令。
在考虑例示了如当前领会到的实施本发明的最佳模式的说明性实施方式的以下详细描述时,本公开的附加特征对本领域技术人员而言将变得明显。
附图说明
通过参照结合附图考虑时的以下详细描述,本系统和方法的前述方面和许多附加特征将变得更加容易领会并且变得更好理解,在附图中:
图1示出了本公开的车辆的各部件的代表性视图,该车辆具有悬架,该悬架具有多个连续阻尼控制减振器以及与车辆的控制器一体结合的多个传感器;
图2示出了联接至车辆悬架的可调节阻尼减振器;
图3示出了用于车辆比如ATV的x轴线、y轴线和z轴线;
图4示出了用于图1的车辆的示例性动力系统的代表性视图;
图5示出了图1的车辆的示例性控制器的代表性视图;
图6示出了示例性车辆的第一立体图;
图7示出了图6的示例性车辆的第二立体图;
图8示出了图6的示例性车辆的侧视图;
图9示出了图6的示例性车辆的仰视图;
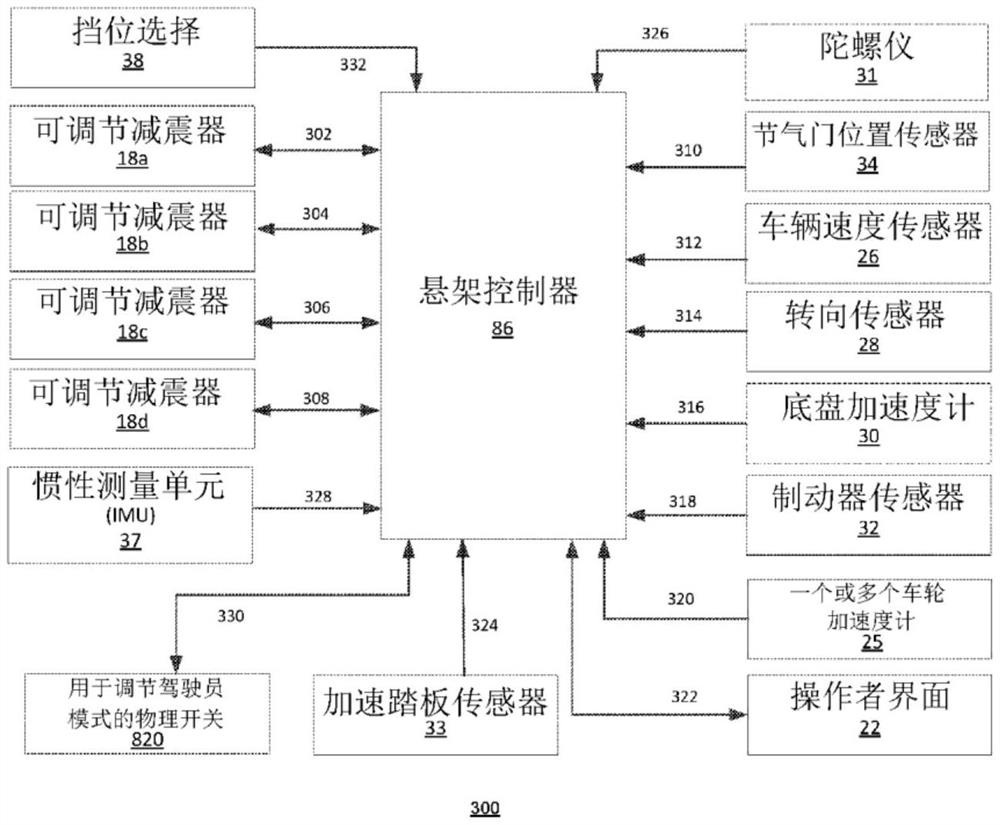
图10示出了用于对一个或更多个减震器的阻尼进行控制的示例性控制系统;
图11示出了对悬架控制器在拐弯事件和/或制动事件期间的操作进行描述的示例性流程图;
图12示出了在制动事件期间对车辆的可调节减震器进行调节的悬架控制器的示例;
图13示出了在拐弯事件期间对车辆的可调节减震器进行调节的悬架控制器的示例;
图14示出了对悬架控制器86在空中事件和着陆事件期间的操作进行描述的示例流程图;
图15示出了车辆在离地前阶段、自由降落阶段和着陆后阶段期间的压缩阻尼特性和回弹阻尼特性的示例表示;
图16示出了对在攀爬操作中执行的悬架控制器进行描述的示例性流程图;
图17示出了在攀爬操作中执行的对车辆的可调节减震器进行调节的悬架控制器的示例;
图18示出了在攀爬操作中执行的对车辆的可调节减震器进行调节的悬架控制器的另一示例;
图19示出了在攀爬操作中执行的对车辆的可调节减震器进行调节的悬架控制器的另一示例;
图20示出了在攀爬操作中执行的对车辆的可调节减震器进行调节的悬架控制器的另一示例;
图21示出了对悬架控制器在滑动事件期间的操作进行描述的示例性流程图;
图22示出了在滑动事件期间对可调节减震器进行调节的悬架控制器的另一示例;
图23示出了在滑动事件期间对可调节减震器进行调节的悬架控制器的另一示例;
图24示出了图示用于执行车辆的惯性测量的实时校正的方法的示例性流程图;
图25示出了图示悬架控制器中的逻辑部件的示例的示例性示意框图;
图26示出了对悬架控制器在驾驶员模式之间切换时的操作进行描述的示例性流程图;
图27示出了用于调节驾驶模式的示例性物理开关;
图28示出了用于调节驾驶员模式的示例性图形用户界面;
图29示出了对用于实现车辆所用的外出辅助的方法进行描述的示例性流程图;
图30图示了图1的车辆的摆动杆的代表性视图;以及
图31图示了另一示例性车辆的视图。
具体实施方式
出于促进对本公开的原理的理解的目的,现在将参照下面描述的在附图中图示的实施方式。下面公开的实施方式并不意在穷举或限制于以下详细描述中公开的精确形式。而是,选择并描述实施方式以使得本领域技术人员可以利用这些实施方式的教示。
现在参照图1,本公开涉及车辆10,该车辆10具有位于多个地面接合构件12与车辆框架14之间的悬架系统11。示例性地面接合构件12包括车轮、滑雪板、导轨、胎面或用于将车辆相对于地面进行支承的其他合适的设备。悬架通常包括弹簧16和联接在地面接合构件12与框架14之间的减震器18。弹簧16可以包括例如螺旋弹簧、板簧、空气弹簧或其他气体弹簧。空气或气体弹簧16可以是可调节的。例如,参见转让给本受让人的美国专利No.7,950,486,该美国专利的全部公开内容通过参引并入本文中。
可调节减震器18通常通过A形臂式连杆70(参见图2)或其他类型的连杆联接在车辆框架14与地面接合构件12之间。弹簧16也联接在地面接合构件12与车辆框架14之间。图2图示了安装在A形臂式连杆70上的可调节减震器18,该可调节减震器18具有以可枢转的方式联接至车辆框架14的第一端部和以可枢转的方式联接至与车轮12一起移动的A形臂式连杆70的第二端部。阻尼控制启用器74通过一个或更多个线缆76联接至控制器20。示例性阻尼控制启用器是下述电子控制阀:该电子控制阀被启用以增加或降低可调节减震器18的阻尼特性。
在一个实施方式中,可调节减震器18包括安装在减震器本体的基部处或安装在减震器18的阻尼活塞内部的电磁阀。通过将附加的流体引入至减震器的内部、将流体从减震器的内部移除、和/或增加或降低流体可以从减震器的阻尼活塞的第一侧穿过至减震器的阻尼活塞的第二侧的容易性而增大或减小减震器的刚度。在另一实施方式中,可调节减震器18包括位于减震器18内部的磁流变流体。通过改变由磁流变流体所经历的磁场而增大或减小减震器的刚度。在转让给本受让人的于2015年11月6日提交的题目为“VEHICLE HAVINGSUSPENSION WITH CONTINUOUS DAMPING CONTROL(具有带有连续阻尼控制的悬架的车辆)”的美国公开的专利申请No.2016/0059660中提供了示例性可调节减震器的附加细节,该专利申请的全部公开内容通过参引明确地并入本文中。
在一个实施方式中,与地面接合构件12中的每个地面接合构件12邻近地定位有弹簧16和减震器18。例如,在全地形车辆(ATV)中,与四个车轮12中的每个车轮邻近地设置有弹簧16和可调节减震器18。例如,在雪地车中,为两个前滑雪板和后胎面中的每一者设置有一个或更多个弹簧16和一个或更多个可调节减震器18。一些制造商提供呈空气弹簧或液压预载环的形式的可调节弹簧16。这些可调节弹簧16允许操作者在旅途中调节驾乘高度。然而,驾乘舒适性大多来自于由减震器18所提供的阻尼。
在图示的实施方式中,控制器20提供用于调节可调节减震器18的阻尼特性的信号和/或命令。例如,控制器20提供用于以连续或动态的方式调节减震器18的阻尼的信号。换句话说,可调节减震器18可以被调节成提供不同的压缩阻尼、回弹阻尼或压缩阻尼和回弹阻尼两者。在一个实施方式中,可调节减震器18包括用于调节压缩阻尼的第一可控制式阀以及用于调节回弹阻尼的第二可控制式阀。在另一实施方式中,可调节减震器包括控制压缩阻尼和回弹阻尼两者的组合阀。
在本公开的图示的实施方式中,在操作车辆的驾驶员能够容易触及的位置中设置有操作者界面22。例如,操作者界面22是邻近驾驶员的座椅安装在仪表板上或者一体地结合到车辆内的显示器上的单独的用户界面。操作者界面22包括用户输入设备,以允许驾驶员或乘客在车辆的操作期间基于遇到的道路状况手动调节减震器18的阻尼,或者通过选择驾乘模式为减震器18选择预先编程的主动阻尼曲线。在一个实施方式中,所选择的驾乘模式(例如,所选择的驾驶员模式)仅改变悬架系统11的特性,比如改变减震器18的阻尼曲线。在一个实施方式中,所选择的驾乘模式改变悬架系统11和其他车辆系统比如传动系扭矩管理系统50或转向系统104的特性。
用于操作者界面22的示例性输入设备包括杆、按钮、开关、软键盘以及其他合适的输入设备。操作者界面22还可以包括用于向操作者传送信息的输出设备。示例性输出设备包括灯、显示器、音频设备、触觉设备以及其他合适的输出设备。在另一图示的实施方式中,用户输入设备位于车辆10的方向盘、车把或其他转向控制装置上,以有助于阻尼调节的致动。例如,参照图27,物理开关820可以位于车辆10的方向盘、车把或其他转向控制装置上。显示器24也设置在操作者界面22上或靠近操作者界面22设置或者一体地结合到车辆10的仪表板显示器中,以显示与压缩阻尼特性和/或回弹阻尼特性有关的信息。
如下面进一步详细说明的,控制器20接收来自操作者界面22的用户输入并且相应地调节可调节减震器18的阻尼特性。操作者可以独立地调节前减震器18和后减震器18,以调节车辆10的驾乘特性。在某些实施方式中,减震器18中的每个减震器18均是可独立调节的,使得减震器18的阻尼特性从车辆10的一侧相对于另一侧进行改变。一侧对一侧的调节在急转弯或车辆的相反侧上的减震器18的不同的阻尼曲线改善了车辆的操纵特性的其他操纵期间是期望的。减震器18的阻尼响应可以在几毫秒内改变,以提供阻尼在道路中的坑洼、凹陷或其他驾驶状况下的几乎瞬时的变化。附加地和/或替代性地,控制器20可以独立地调节前减震器18和/或后减震器18的阻尼特性。除了其他优点之外,调节前减震器18和/或后减震器18的阻尼特性的优点还在于,车辆10能够在崎岖地形中更有效地操作。
控制器20与多个车辆状况传感器40通信(例如,提供、发送、接收和/或获得)。例如,与每个地面接合构件12邻近地联接有车轮加速度计25。控制器20与加速度计25中的每个加速度计通信。例如,加速度计25可以提供指示地面接合构件以及悬架部件16和18在车辆穿越不同地形时的运动的信息。此外,控制器20可以与附加的车辆状况传感器40比如车辆速度传感器26、转向传感器28、底盘支承的加速度计30、底盘支承的陀螺仪31、惯性测量单元(IMU)37(图10中示出)、物理开关820(图10中示出)以及对车辆10的一个或更多个特性进行监测的其他传感器。
加速度计30说明性地是支承在车辆10的底盘上的用以提供指示车辆10在操作期间的加速力的信息的三轴加速度计。在一些情况下,加速度计30位于车辆10的中央位置(例如,重心位置)处或靠近车辆10的中央位置(例如,重心位置)。在其他情况下,加速度计30位于不靠近车辆10的重心的位置处。在图6至图9中图示的示例性车辆200中,底盘加速度计30沿着车辆200的纵向中心线平面122定位。在图3中示出了用于车辆10的x轴线、y轴线和z轴线,车辆10说明性地为ATV。
陀螺仪31说明性地是支承在底盘上的用以提供车辆在操作期间的惯性测量值比如侧倾率、俯仰率和/或横摆率的指示的三轴陀螺仪。在一个实施方式中,加速度计30不位于车辆10的重心处,并且由控制器20使用陀螺仪31的读数以确定车辆10在车辆10的重心处的加速度值。在一个实施方式中,加速度计30和陀螺仪31被一体地结合到控制器20比如悬架控制器86中。
在一些示例中并且参照图10,诸如IMU 37之类的IMU支承在底盘上,以提供车辆10在操作期间的惯性测量值——其包括角速度和/或加速力——的指示。IMU 37可以包括加速度计30和/或陀螺仪31的功能。因此,在一些情况下,加速度计30和/或陀螺仪31是可选的,并且可以不被包括在车辆10中。在其他情况下,车辆10可以包括陀螺仪31和加速度计30,而不是IMU 37。
控制器20还可以与附加的车辆状况传感器40比如制动器传感器32、节气门位置传感器34、车轮速度传感器36和/或档位选择传感器38通信。
参照图4,图示了车辆10的传动系扭矩管理系统50的一个实施方式。传动系扭矩管理系统50控制由地面接合构件12中的每个地面接合构件施加的扭矩的量。传动系扭矩管理系统50向地面接合构件12中的一个或更多个地面接合构件12提供正扭矩,以通过动力系统60为车辆10的运动供以动力。传动系扭矩管理系统50还向地面接合构件12中的一个或更多个地面接合构件12提供负扭矩,以通过制动系统75使车辆10的运动减慢或停止。在一个示例中,地面接合构件12中的每个地面接合构件具有制动系统75的相关联的制动器。
动力系统60包括原动机62。示例性原动机62包括内燃发动机、两冲程内燃发动机、四冲程内燃发动机、柴油发动机、电动马达、混合动力发动机以及其他合适的动力源。为了启动原动机62,提供了动力供应系统64。动力供应系统64的类型取决于所使用的原动机62的类型。在一个实施方式中,原动机62是内燃发动机,并且动力供应系统64是拉动式启动系统和电启动系统中的一者。在一个实施方式中,原动机62是电动马达,并且动力供应系统64是将一个或更多个电池电联接至电动马达的开关系统。
原动机62联接有变速器66。变速器66将原动机62的输出轴61的转速转换成变速器66的输出轴63的更快转速或更慢转速中的一者。可以设想的是,变速器66可以额外地使输出轴63以与输出轴61的速度相同的速度旋转。
在图示的实施方式中,变速器66包括可换档变速器68和无级变速器(“CVT”)71。在一个示例中,CVT 71的输入构件联接至原动机62。可换档变速器68的输入构件又联接至CVT71的输出构件。在一个实施方式中,可换档变速器68包括前进高档位设置、前进低档位设置、空档档位设置、驻车档位设置以及倒车档位设置。从原动机62传送至CVT 71的动力被提供给CVT 71的驱动构件。该驱动构件又通过带将动力提供给从动构件。在美国专利No.3,861,229、美国专利No.6,176,796、美国专利No.6,120,399、美国专利No.6,860,826以及美国专利No.6,938,508中公开了示例性CVT,所述美国专利的公开内容通过参引明确地并入本文中。从动构件将动力提供给可换档变速器68的输入轴。尽管变速器66被图示为包括可换档变速器68和CVT 71两者,但是变速器66可以仅包括可换档变速器68和CVT 71中的一者。此外,变速器66可以包括一个或更多个附加部件。
变速器66还联接至至少一个差速器73,所述至少一个差速器73又联接至至少一个地面接合构件12。差速器73可以将动力从变速器66传送至地面接合构件12中的一个地面接合构件12或传送至多个地面接合构件12。在ATV实施方式中,设置有前差速器和后差速器中的一者或两者。前差速器为ATV的两个前车轮中的至少一个前车轮供以动力,并且后差速器为ATV的两个后车轮中的至少一个后车轮供以动力。在具有用于使至少操作者和乘客处于并排式构型的坐置部的并排式车辆的实施方式中,设置有前差速器和后差速器中的一者或两者。前差速器为并排式车辆的两个前车轮中的至少一个前车轮供以动力,并且后差速器为并排式车辆的多个后车轮中的至少一个后车轮供以动力。在一个示例中,并排式车辆具有三个轴并且为每个轴均设置有差速器。在图6至图9中图示了示例性并排式车辆200。
在一个实施方式中,制动系统75包括防抱死制动器。在一个实施方式中,制动系统75包括主动下降控制和/或发动机制动。在一个实施方式中,制动系统75包括制动器,并且在一些实施方式中,制动系统75包括单独的驻车制动器。制动系统75可以联接至原动机62、变速器66、差速器73和地面接合构件12或位于地面接合构件12之间的连接驱动构件中的任一者。在一个示例中,制动器传感器32监测何时应用制动系统75。在一个示例中,制动器传感器32监测何时应用用户可致动的制动器输入装置、比如车辆200中的制动器踏板232(参见图7)。
参照图5,控制器20具有至少一个相关联的存储器76。控制器20提供对车辆10的各种部件的电子控制。此外,控制器20操作性地联接至如上所述的多个车辆状况传感器40,所述多个车辆状况传感器40监测车辆10的各种参数或车辆10周围的环境。控制器20执行某些操作(例如,提供命令)以控制其他车辆部件的一个或更多个子系统。在某些实施方式中,控制器20形成处理子系统的一部分,该处理子系统包括具有存储器、处理装置和通信硬件的一个或更多个计算设备。控制器20可以是单个设备或分布式设备,并且控制器20的功能可以通过硬件执行和/或作为非暂时性计算机可读存储介质比如存储器76上的计算机指令来执行。
如图5的实施方式中图示的,控制器20被表示为包括若干个控制器。这些控制器可以各自为单个设备或分布式设备,或者这些控制器中的一个或更多个控制器可以一起为单个设备或分布式设备的一部分。这些控制器的功能可以通过硬件执行和/或作为非暂时性计算机可读存储介质比如存储器76上的计算机指令来执行。
在一个实施方式中,控制器20包括经由网络78进行通信的至少两个单独的控制器。在一个实施方式中,网络78是CAN网络。在于2005年9月1日提交的序列号为No.11/218,163的美国专利申请中公开了关于示例性CAN网络的细节,该美国专利申请的公开内容通过参引明确地并入本文中。当然,可以使用任何合适类型的网络或数据总线来代替CAN网络。在一个实施方式中,针对一些连接使用两线串行通信。
参照图5,控制器20包括操作者界面控制器80,该操作者界面控制器80通过操作者界面22控制与操作者的通信。原动机控制器82控制原动机62的操作。变速器控制器84控制变速器系统66的操作。
悬架控制器86控制悬架系统11的可调节部分。示例性可调节部件包括可调节减振器18、可调节弹簧16和/或可构造稳定杆。在转让给本受让人的于2015年11月6日提交的题目为“VEHICLE HAVING SUSPENSION WITH CONTINUOUS DAMPING CONTROL(具有带有连续阻尼控制的悬架的车辆)”的美国公开的专利申请No.2016/0059660中提供了关于可调节减振器、可调节弹簧和可构造稳定杆的附加细节,该专利申请的全部公开内容通过参引明确地并入本文中。
通信控制器88控制车辆10的通信系统90与远程设备之间的通信,远程设备比如为其他车辆、个人计算设备比如手机或平板电脑、维护一个或更多个数据库的中央计算机系统、以及远离车辆10或由车辆10的驾乘者携带的其他类型的设备。在一个实施方式中,车辆10的通信控制器88经由无线网络与配对的设备通信。示例性无线网络是利用蓝牙协议的射频网络。在该示例中,通信系统90包括射频天线。通信控制器88控制设备与车辆10的配对以及车辆10与远程设备之间的通信。在一个实施方式中,车辆10的通信控制器88经由蜂窝网络与远程设备通信。在该示例中,通信系统90包括蜂窝天线,并且通信控制器88从蜂窝网络接收蜂窝信息并且向蜂窝网络发送蜂窝信息。在一个实施方式中,车辆10的通信控制器88经由卫星网络与远程设备通信。在该示例中,通信系统90包括卫星天线,并且通信控制器88从卫星网络接收信息并且向卫星网络发送信息。在一个实施方式中,车辆10能够经由射频网状网络与其他车辆10通信,并且通信控制器88和通信系统90配置成使得能够经由网状网络进行通信。在于2016年9月12日提交的题目为“VEHICLE TO VEHICLE COMMUNICATIONSDEVICE AND METHODS FOR RECREATIONAL VEHICLES(用于休闲车辆的车辆对车辆通信设备和方法)”、序列号为No.15/262,113的美国专利申请中公开了示例性车辆通信系统,该美国专利申请的全部公开内容通过参引明确地并入本文中。
转向控制器102控制转向系统104的各部分。在一个实施方式中,转向系统104是动力转向系统并且包括一个或更多个转向传感器28(图1中示出)。在转让给本申请的受让人的题目为“VEHICLE(车辆)”、案卷为PLR-06-22542.02P且序列号为No.12/135,107的美国专利申请中提供了示例性传感器和电子动力转向单元,该美国专利申请的公开内容通过参引明确地并入本文中。车辆控制器92控制灯、载荷、附件、底盘级功能和其他车辆功能。驾乘高度控制器96控制车辆的预载荷和操作高度。在一个实施方式中,驾乘高度控制器直接地或通过悬架控制器86控制弹簧16,以调节车辆10的驾乘高度。在一个示例中,与运动型驾乘模式相比,驾乘高度控制器96在舒适型驾乘模式下提供更大的离地间隙。
敏捷性控制器100控制车辆10的制动系统和车辆10的稳定性。敏捷性控制器100的控制方法可以包括一体地结合到制动电路(ABS)中使得稳定性控制系统可以通过结合电子制动控制修正减振器阻尼来改善动态响应(车辆操纵和稳定性)。
在一个实施方式中,控制器20包括位置确定器110并且/或者经由网络78与位置确定器110通信。位置确定器110确定车辆10的当前地理位置。示例性位置确定器110是基于与全球卫星系统的相互作用来确定车辆10的位置的GPS单元。
参照图6至图9,图示了示例性并排式车辆200。如所图示的,车辆200包括多个地面接合构件12。说明性地,地面接合构件12是车轮204和相关联的轮胎206。如本文中所提到的,地面接合构件12中的一个或更多个地面接合构件12操作性地联接至用以向车辆200的运动供以动力的动力系统60(参见图4)和用以使车辆200的运动减慢的制动系统75。
参照图6中的图示的实施方式,第一组车轮通常对应于前轴208,其中,车辆200的每侧上具有第一组车轮中的一个车轮。第二组车轮通常对应于后轴210,其中,车辆200的每侧上具有第二组车轮中的一个车轮。尽管前轴208和后轴210中的每一者均被示出为在每侧上具有单个地面接合构件12,但是在相应的前轴208和后轴210的每侧上可以包括多个地面接合构件12。如图6中构造的,车辆200是四轮两轴式车辆。
参照图9,前轴208的车轮204通过前部独立悬架214联接至车辆200的框架212。图示的实施方式中的前部独立悬架214是双A形臂式悬架。对于前部独立悬架214而言,可以使用其他类型的悬架系统。后轴210的车轮204通过后部独立悬架216联接至车辆200的框架212。对于后部独立悬架216而言,可以使用其他类型的悬架系统。
返回图6,车辆200包括货物承载部分250。货物承载部分250定位在操作者区域222的后方。操作者区域222包括坐置部224和多个操作者控制装置。在图示的实施方式中,坐置部224包括一对凹背座椅。在一个实施方式中,坐置部224是长条座椅。在一个实施方式中,坐置部224包括多排座椅,所述多排座椅是凹背座椅或长条座椅或凹背座椅和长条座椅的组合。示例性操作者控制装置包括方向盘226、档位选择器228、加速器踏板230(参见图7)和制动器踏板232(参见图7)。方向盘226操作性地联接至前轴208的车轮以控制车轮相对于框架212的取向。档位选择器228操作性地联接至可换档变速器68,以选择可换档变速器68的档位。示例性档位包括一个或更多个前进档位、一个或更多个倒车档位以及驻车档位设置。加速器踏板230操作性地联接至原动机62,以控制车辆200的速度。制动器踏板232操作性地联接至与车轮204中的一个或更多个车轮204相关联的制动器单元,以使车辆200的速度减慢。
操作者区域222由防滚架240保护。参照图6,在车辆200的操作者侧和车辆200的乘客侧均设置有侧部保护构件242。在图示的实施方式中,侧部保护构件262各自是一体的管状构件。
在图示的实施方式中,货物承载部分250包括具有底板256和多个直立壁的货厢234。底板256可以是扁平的、有轮廓的,并且/或者包括若干部段。货物承载部分250的各部分还包括接纳膨胀保持器(未示出)的安装件258。膨胀保持器可以将各种附件联接至货物承载部分250。在Whiting等人于2004年7月13日提交的题目为“Vehicle ExpansionRetainers(车辆膨胀保持器)”的美国专利No.7,055,454中提供了这些安装件和膨胀保持器的附加细节,该美国专利的全部公开内容通过参引明确地并入本文中。
前悬架214A和214B各自分别包括减振器260。类似地,后悬架216A和216B各自包括减振器262。在一个实施方式中,减振器260和减振器262中的每一者都是由车辆200的控制器20控制的可电子调节的减振器18。
在转让给本受让人的美国专利No.8,827,019和美国专利No.9,211,924中提供了关于车辆200的附加细节,所述美国专利的全部公开内容通过参引明确地并入本文中。其他示例性休闲车辆包括ATV、多用途车辆、雪地车、设计成用于越野使用的其他休闲车辆、公路摩托车、以及其他合适的车辆(例如,图31)。
图10示出了用于控制减震器18的阻尼的示例性控制系统300。在一些情况下,控制系统300可以被包括在上述车辆10和/或车辆200中。例如,悬架控制器86可以与来自上述车辆10和/或200的一个或更多个实体(例如,传感器、设备、控制器和/或子系统)通信(例如,接收和/或提供)。另外,和/或替代性地,车辆10和200可以是相同的车辆(例如,车辆200可以包括来自车辆10的实体、比如悬架控制器86)。
另外,控制器20可以如上面在图5中所述包括悬架控制器86。悬架控制器86可以如上所述与多个车辆状况传感器40通信。此外,悬架控制器86可以向可调节减震器18a、18b、18c和18d中的每一者提供信息(例如,一个或更多个命令)。例如,悬架控制器86可以提供用于调节可调节减震器18a、18b、18c和18d的压缩阻尼特性和/或回弹阻尼特性的命令。
尽管在图10中提供了示例性传感器、设备、控制器和/或子系统,但是在美国公开专利申请No.2016/0059660(其于2015年11月6日提交,题目为“VEHICLE HAVINGSUSPENSION WITH CONTINUOUS DAMPING CONTROL(具有带有连续阻尼控制的悬架的车辆)”)和美国公开申请2018/0141543(其于2017年11月17日提交,题目为“VEHICLE HAVINGADJUSTABLE SUSPENSION(具有可调节悬架的车辆)”)中提供了由悬架控制器86使用以调节减震器18的另外的示例性传感器、设备、控制器和/或子系统,这两个专利均被转让给本受让人并且这两个专利各自的全部公开内容通过参引明确地并入本文中。
说明性控制系统300不意在建议关于本公开的实施方式的使用范围或功能的任何限制。说明性控制系统300也不应该被解释为具有与其中所图示的任何单个实体或实体的组合有关的任何依赖性或要求。另外,在实施方式中,图10中所描绘的各种实体可以与其中描绘的其他实体中的各种实体(和/或未图示的实体)结合。例如,悬架控制器86可以被包括在控制器20内,并且可以如上所述与一个或更多个车辆状况传感器40通信。下面将描述悬架控制器86和/或控制系统300中的其他实体的功能。
图11示出了对悬架控制器86在拐弯事件和/或制动事件期间的操作进行描述的示例流程图。图12和图13示出了在拐弯事件和/或制动事件期间调节车辆10的减震器18的悬架控制器86的示例。如下面将更详细描述的,为了在制动事件和/或拐弯事件期间的更好的性能,车辆比如车辆10可以使用控制器20(例如,悬架控制器86)来调节回弹阻尼和/或压缩阻尼。例如,在拐弯事件期间,悬架控制器86可以减小(例如,降低)内部可调节减震器18的压缩阻尼,这可以使车辆10在拐弯期间较低地驾乘并且/或者在内部地面接合构件12遇到颠簸时不容易翻倒。此外,悬架控制器86可以减小外部可调节减震器18的回弹阻尼,这可以促进冲击扩展以使车辆10平坦并且/或者使车辆10的车轮更好地跟随地面以提供更好的牵引力。另外,和/或替代性地,悬架控制器86可以增加外部可调节减震器18的压缩阻尼并且/或者增加内部可调节减震器18的回弹阻尼。
在制动事件期间,悬架控制器86可以基于减速度率(例如,减速值)来减小后部可调节减震器18的压缩阻尼,这可以使车辆10在颠簸和/或崎岖的道路上的稳定性增加。此外,通过减小后部可调节减震器18的压缩阻尼,悬架控制器86可以使后部地面接合构件12更好地吸收诸如颠簸之类的事件。而且,悬架控制器86还可以减小前部可调节减震器18的回弹阻尼,这可以促进冲击扩展以使车辆10平坦并且/或者使车辆10的车轮更好地跟随地面以提供更好的牵引力。另外,和/或替代性地,悬架控制器86可以增加前部可调节减震器18的压缩阻尼并且/或者增加后部可调节减震器18的回弹阻尼。通过增加后部可调节减震器18的回弹阻尼,车辆10可以在制动事件期间能够更好地控制俯仰本体的运动和/或重量传递。此外,悬架控制器86可以在车辆10在制动时遇到颠簸的情况下保持车辆10更平坦和/或更稳定。
在操作中,在步骤402处,悬架控制器86可以从一个或更多个传感器、比如转向传感器28接收转向信息。转向信息可以指示方向盘、比如方向盘226的转向位置、转向角和/或转向率。转向位置和/或转向角可以指示车辆10的方向盘的位置和/或角度。转向率可以指示方向盘的位置和/或角度在一段时间内的变化。
在步骤404处,悬架控制器86可以从一个或更多个传感器、比如陀螺仪31和/或IMU37接收横摆率信息。该横摆信息指示车辆10的横摆率。
在步骤406处,悬架控制器86可以从诸如IMU 37和/或底盘加速度计30之类的一个或更多个传感器接收指示车辆10的加速度率或减速度率的加速度信息。加速度信息可以指示车辆的多轴加速度值、比如纵向加速度和/或横向加速度。在一些示例中,悬架控制器86可以从诸如节气门位置传感器34和/或加速器踏板传感器33之类的另一传感器接收信息。悬架控制器86使用该信息来确定加速度率。例如,悬架控制器86可以使用来自节气门位置传感器的节气门位置和/或来自加速踏板传感器33的加速器踏板230的位置来确定车辆10是正在加速还是减速。
在步骤408处,悬架控制器86可以从诸如制动器传感器32之类的传感器接收制动器信息。制动器信息可以指示制动器踏板232的位置(例如,制动和/或不制动)。另外,和/或替代性地,制动器信息可以指示制动器踏板232上的制动器压力的量。
在步骤410处,悬架控制器86可以从操作者界面22和/或一个或更多个其他控制器(例如,控制器20)接收车辆10的操作模式。每种模式可以包括回弹阻尼和/或压缩阻尼的不同设定值。操作者(例如,用户)可以在操作者界面22上输入操作模式。操作者界面22可以向控制器20和/或悬架控制器86提供指示操作模式的用户输入。悬架控制器86可以使用用户输入来确定车辆10的操作模式。
在步骤412处,悬架控制器86可以确定拐弯事件(例如,转弯)是否正在发生。此外,悬架控制器86可以确定转弯的方向(例如,左转弯或右转弯)。例如,悬架控制器86可以基于指示转向率、转向角和/或转向位置的转向信息、指示横摆率的横摆率信息和/或指示横向加速度的加速度信息来确定拐弯事件和/或转弯的方向。悬架控制器86可以将转向率、转向角、转向位置、横摆率和/或横向加速度与一个或更多个对应的阈值(例如,预定、预编程和/或用户定义的阈值)进行比较以确定拐弯事件。悬架控制器86可以使用转向率、转向角、转向位置、横摆率和/或横向加速度的正值和/或负值来确定转弯的方向。
在一些示例中,悬架控制器86可以基于转向率、转向角和/或转向位置大于阈值来确定拐弯事件。在这样的示例中,方法400可以移至步骤414。否则,如果悬架控制器86确定转向率、转向角和/或转向位置低于阈值,则方法400可以移至步骤418。在一些变型中,悬架控制器86可以基于横摆率确定拐弯事件。例如,基于横摆率大于阈值,悬架控制器86可以确定正在发生拐弯事件。在一些情况下,悬架控制器86可以基于横向加速度来确定拐弯事件。例如,基于横向加速度大于阈值,悬架控制器86可以确定正在发生拐弯事件。
在一些变型中,悬架控制器86可以确定转向信息、横摆率信息和/或加速度信息的优先顺序,并且基于优先级确定拐弯事件。例如,在一些示例中,转向位置和/或转向角、转向率、横摆率和横向加速度都可以指示转弯。在其他示例中,转向位置和/或转向角、转向率、横摆率和/或横向加速度可能会冲突(例如,转向位置可以不指示转弯,而横摆率可以指示转弯;横摆率可以不指示转弯,而横向加速度可以指示转弯)。例如,在反向转向或滑动时,车辆10可以沿一个方向比如左转弯(例如,由横摆率和/或横向加速度指示的转弯)转弯;但是,转向位置可以指示沿相反方向的转弯比如右转弯,也可以不指示转弯。在这样的示例中,悬架控制器86可以使横向加速度和/或横摆率优先于转向率、转向角和/或转向位置。例如,悬架控制器86可以确定车辆10正在转弯并且该转弯是左转弯。
在一些变型中,悬架控制器86可以使横向加速度优先于横摆率并且使横摆率优先于转向率、转向角和/或转向位置。换句话说,即使横摆率、转向率、转向角和/或转向位置不指示转弯,悬架控制器86也可以基于横向加速度指示转弯来确定正在发生拐弯事件和/或转弯的方向。此外,即使转向率、转向角和/或转向位置不指示转弯,悬架控制器86也可以基于横摆率指示转弯来确定正在发生拐弯事件和/或转弯的方向。
在步骤414处,悬架控制器86可以确定车辆10的拐弯状态。拐弯状态可以指示车辆10是正在进入拐弯事件、处于拐弯事件中还是驶出拐弯事件。另外,和/或替代性地,拐弯状态可以指示车辆10在拐弯事件中是正在制动、加速还是减速。例如,悬架控制器86可以基于加速度信息(例如,纵向加速度)和/或制动器信息(例如,制动器踏板232的位置和/或制动器踏板232上的压力的量)来确定拐弯状态。如将在下面解释的,悬架控制器86可以基于拐弯事件、车辆10的制动和/或车辆10的加速度/减速度来调节和/或偏置可调节减震器18。
在步骤416处,悬架控制器86可以执行可调节减震器18中的一个或更多个可调节减震器的拐弯状况修正器。例如,悬架控制器86可以基于(例如,从指示车辆10正在转弯的步骤412)检测到拐弯事件来调节(例如,增加和/或降低)可调节减震器18中的一个或更多个可调节减震器的回弹阻尼和/或压缩阻尼。图13示出了在拐弯事件期间车辆10的悬架。例如,响应于检测到拐弯事件,悬架控制器86可以向可调节减震器18提供信息(例如,一个或更多个命令)。例如,悬架控制器86可以(例如,基于转向位置或转向率、横摆率和/或横向加速度)确定车辆10正在向左转弯。作为响应,悬架控制器86可以向内部可调节减震器18a和/或18c提供用于降低压缩阻尼(CD)和/或增加回弹阻尼(RD)的信息302和/或306。通过降低内部可调节减震器18a和/或18c的压缩阻尼,车辆10可以在崎岖的地形中拐弯时更好地吸收该侧的颠簸和/或更稳定。此外,车辆10可以在拐弯时坐置得更低,因为当车辆“在摆动杆上”扭转时,内部将更容易移动通过压缩冲程。另外,通过增加内部可调节减震器18a和/或18c上的回弹,车辆10可以在拐弯事件期间控制侧倾梯度和/或侧倾率。同样,悬架控制器86可以向外部可调节减震器18b和/或18d提供用于增加压缩阻尼(CD)和/或降低回弹阻尼(RD)的信息304和/或308。在悬架控制器86确定和/或执行拐弯状况修正器之后,方法400可以移动返回至步骤402并且连续地重复。
在一些变型中,在拐弯事件期间,悬架控制器86可以基于拐弯状态(例如,车辆10的制动和/或车辆10的加速度/减速度)来调节(例如,增加和/或降低)可调节减震器18中的一个或更多个可调节减震器的回弹阻尼和/或压缩阻尼。例如,在拐弯事件期间,悬架控制器86可以如上所述调节内部可调节减震器18和/或外部可调节减震器18的压缩阻尼和/或回弹阻尼。另外,和/或替代性地,基于制动、加速度率和/或减速度率,悬架控制器86可以使前部可调节减震器18和后部可调节减震器18的压缩阻尼和/或回弹阻尼进一步偏置(例如,进一步增加一定值或百分比和/或进一步减少一定值或百分比)。通过偏置压缩阻尼和/或回弹阻尼,车辆10可以改善在拐弯进入和驶出时的重量传递,并且还可以改善车辆的横摆响应。
换句话说,响应于检测到拐弯事件,悬架控制器86可以如上所述调节内部可调节减震器18/外部可调节减震器18。然后,基于车辆10慢下来,悬架控制器86可以检测并且/或者确定车辆的纵向减速度(例如,负纵向加速度)。基于检测到纵向减速度,悬架控制器86还可以偏置(例如,改变和/或确定)前部可调节减震器18/后部可调节减震器18的压缩阻尼和/或回弹阻尼。例如,基于纵向减速度,悬架控制器86可以使前部可调节减震器18a和18b的压缩阻尼另外增加(例如,增加一定百分比或值)并且/或者使后部可调节减震器18c和18d的压缩阻尼另外降低(例如,降低一定百分比或值)。此外,悬架控制器86可以另外增加后部减震器18c和18d的回弹阻尼并且/或者另外降低前部减震器18a和18b的回弹阻尼。
例如,悬架控制器86可以如上所述基于减震器是内部减震器还是外部减震器来调节减震器18的压缩阻尼和/或回弹阻尼(例如,将压缩阻尼设定为值73)。然后,基于拐弯状态(例如,正纵向加速度/负纵向加速度),悬架控制器86还可以偏置压缩阻尼和/或回弹阻尼。例如,如果悬架控制器86检测到正加速度,则悬架控制器86可以降低前部压缩阻尼(例如,将压缩阻尼从73设定为62),而如果悬架控制器86检测到负加速度,则悬架控制器86可以增加前部压缩阻尼(例如,将压缩阻尼从73设定为80)。对于回弹阻尼,悬架控制器86可以类似地操作。
另外,和/或替代性地,悬架控制器86可以基于正纵向加速度/负纵向加速度大于或小于一个或更多个阈值来不同地偏置压缩阻尼和/或回弹阻尼。例如,如果加速度大于第一阈值,则悬架控制器86可以将压缩阻尼从第一值(例如73)设定为第二值(例如62)。如果加速度大于第二阈值,则悬架控制器86可以将压缩阻尼从第一值(例如73)设定为第三值(例如59)。另外,和/或替代性地,如果加速度大于第三阈值,则悬架控制器86可以将压缩阻尼从第一值(例如73)设定为第四值(例如44)。对于负加速度和/或制动,悬架控制器86同样可以类似地操作。
在拐弯事件结束(例如,退出转弯)时,车辆10可以加速(例如,操作者可以致动加速器踏板230)。基于检测到正加速度(例如,纵向加速度),悬架控制器86可以使前部减震器18/后部减震器18进一步偏置。例如,基于正纵向加速度,悬架控制器86可以另外增加后部可调节减震器18c和18d的压缩阻尼并且/或者另外降低前部可调节减震器18a和18b的压缩阻尼。此外,悬架控制器86可以另外增加前部减震器18a和18b的回弹阻尼并且/或者另外降低后部减震器18c和18d的回弹阻尼。在执行拐弯状况修正器之后,方法400可以移动返回至步骤402。
如果悬架控制器86没有检测到拐弯事件,则方法400可以移至步骤418。在步骤418处,悬架控制器86可以确定制动事件是否正在发生。例如,悬架控制器86可以确定制动器踏板232是否被致动。换句话说,悬架控制器86可以确定或检测制动事件(例如,车辆10是否正在制动)。如果悬架控制器86确定制动器踏板232未被致动,则方法400移动返回至402并且然后重复。如果悬架控制器86确定制动器踏板232被致动,则方法400移至步骤410。
在步骤420处,悬架控制器86可以确定车辆10的减速度率(例如,重力常数(G)的十分之二或G的一半)。例如,悬架控制器86可以从底盘加速度计30和/或IMU 37确定车辆10的减速度率。另外,和/或替代性地,悬架控制器86可以基于制动器踏板232上的制动器压力的量来确定和/或预测车辆10的减速度率。如上所提及的,制动器传感器32可以将制动器踏板232上的制动器压力的量提供给悬架控制器86。另外,和/或替代性地,悬架控制器86可以基于来自发动机扭矩传感器的发动机扭矩减小来确定和/或预测车辆10的减速度率。
在步骤422处,悬架控制器86可以执行可调节减震器18中的一个或更多个可调节减震器的制动状况修正器。例如,悬架控制器86可以基于(例如,从指示制动器踏板已经被致动的步骤408)检测到制动事件来调节(例如,增加和/或降低)可调节减震器18中的一个或更多个可调节减震器的回弹阻尼和/或压缩阻尼。图12示出了在制动事件期间车辆10的悬架。例如,响应于检测到致动事件,悬架控制器86可以在制动事件期间向可调节减震器18提供信息(例如,一个或更多个命令)。例如,悬架控制器86可以向前部可调节减震器18a和/或18c提供用于增加压缩阻尼(CD)并降低回弹阻尼(RD)的信息302和/或304。另外,悬架控制器86可以向后部可调节减震器18c和/或18d提供用于增加回弹阻尼(RD)并降低压缩阻尼(CD)的信息306和/或308。在悬架控制器86确定和/或执行制动状况修正器之后,方法400可以移动返回至步骤402并且连续地重复。
在一些示例中,响应于检测到制动事件,悬架控制器86可以使用来自步骤410的减速度率来调节一个或更多个可调节减震器18的回弹阻尼和/或压缩阻尼。例如,基于将减速度率与阈值进行比较,悬架控制器86可以调节回弹阻尼和/或压缩阻尼。例如,如果减速度率高于第一阈值(例如,高于G的十分之二),则悬架控制器86可以减小后部可调节减震器18c和/或18d的压缩阻尼。如果减速度低于第一阈值,则悬架控制器86可以不减小后部可调节减震器18c和/或18d的压缩阻尼(例如,维持当前压缩阻尼)。另外,和/或替代性地,如果减速度率高于第一阈值(例如,高于G的十分之二),但是低于第二阈值(例如,G的一半),则悬架控制器86可以将压缩阻尼减小至第一值。如果减速度高于第二阈值,则悬架控制器86可以将压缩阻尼减小至低于第一值的第二值(例如,较小的压缩阻尼值)。
在一些情况下,悬架控制器86可以使制动事件和/或拐弯事件的操作分开。例如,步骤412、414和416可以是可选的,并且方法400可以直接移至步骤418。
图14示出了描述悬架控制器86在空中事件和着陆事件期间的操作的示例流程图。将参照图15来描述图14。图15示出了图示车辆比如车辆10和/或车辆200在离地前阶段530、自由降落阶段535、以及着陆后阶段540期间的压缩阻尼特性和回弹阻尼特性的示例曲线图525。如下面将更详细地描述的,通过在自由降落和/或着陆后事件期间调节一个或更多个可调节减震器18的压缩阻尼和/或回弹阻尼,悬架控制器86可以通过防止车辆10跳动、卸载和/或降低地面接合构件12上的重量来增加车辆10着陆后的稳定性。另外,和/或替代性地,这也可以在比赛环境中提供更快的车辆10,因为在着陆事件之后,节气门可以更快地应用而无需轮胎(例如,地面接合构件12)旋转。另外,和/或替代性地,这也可以提供更稳定的车辆,因为车辆10将具有更好的牵引力,并且因此提供更好的用户控制。
在操作中,在步骤502处,悬架控制器86可以从车辆10的一个或更多个实体(例如,传感器、设备和/或子系统)接收信息(例如,输入信息)。例如,悬架控制器86可以从一个或更多个传感器、设备和/或子系统接收(例如,检索和/或获得)信息(例如,指示传感器读数的数据包和/或信号)。在一些情况下,悬架控制器86可以从底盘加速度计30和/或IMU 37接收指示x轴加速度、y轴加速度和/或z轴加速度的信息。例如,返回参照图3,底盘加速度计30和/或IMU 37可以测量车辆10的x轴加速度值、y轴加速度值和/或z轴加速度值,并且可以将加速度值提供给悬架控制器86。
在步骤506处,悬架控制器86可以确定空中事件是否正在发生。例如,悬架控制器86可以基于x轴加速度值、y轴加速度值和/或z轴加速度值的大小来确定空中事件是否正在发生。例如,悬架控制器86可以将x轴加速度值、y轴加速度值和/或z轴加速度值与一个或更多个阈值(例如,一个或更多个预定义、预编程和/或用户定义的阈值)进行比较,以确定车辆10是否处于自由降落中。如果x轴加速度值、y轴加速度值和/或z轴加速度值小于一个或更多个阈值,则方法500可以移至步骤508。如果x轴加速度值、y轴加速度值和/或z轴加速度值大于阈值,则方法500可以移动返回至步骤502并且重复。
在一些示例中,悬架控制器86可以使用两个或三个不同的阈值。例如,悬架控制器86可以将x轴加速度、y轴加速度和/或z轴加速度中的每一者的大小与不同的阈值进行比较。另外,和/或替代性地,悬架控制器86可以将x轴加速度和y轴加速度的大小与同一阈值进行比较。例如,在自由降落中,底盘加速度计30和/或IMU 37可以测量到车辆10在x轴线和y轴线上具有零或大致为零的加速度(例如,风、空气阻力和/或其他因素可能引起大致为零的加速度),而在z轴线上具有1G或大致为1G的加速度。由此,悬架控制器86可以将第一阈值用于x轴加速度值和y轴加速度值,并且将第二阈值用于z轴加速度值。在一些变型中,用于x轴线和y轴线的第一阈值可以是3G。在一些情况下,悬架控制器86可以组合(例如,计算)用于x轴加速度、y轴加速度和z轴加速度的加速度的大小,并且将组合的大小与阈值进行比较,以确定车辆10是否处于自由降落中。
在美国公开专利申请No.2016/0059660(其于2015年11月6日提交,题目为“VEHICLE HAVING SUSPENSION WITH CONTINUOUS DAMPING CONTROL(具有带有连续阻尼控制的悬架的车辆)”)和美国公开申请2018/0141543(其于2017年11月17日提交,题目为“VEHICLE HAVING ADJUSTABLE SUSPENSION(具有可调节悬架的车辆)”)中描述了空中事件的示例性检测,这两个专利均被转让给本受让人并且这两个专利各自的全部公开内容通过参引明确地并入本文中。
在步骤508处,悬架控制器86可以确定可调节减震器18中的一个或更多个可调节减震器的空中状况修正器。例如,悬架控制器86可以向可调节减震器18提供用于增加和/或逐渐增加压缩阻尼的信息(例如,一个或更多个命令)。通过增加可调节减震器18,车辆10可以在着陆时增加能量吸收。另外,悬架控制器86可以提供用于降低可调节减震器18的回弹阻尼的信息(例如,一个或更多个命令)。通过降低回弹阻尼,可调节减震器18可以更快地实现完全冲击扩展、增加着陆时的能量吸收、并且/或者增加减震器18的能够用于着陆的行程。例如,悬架控制器86可以将可调节减震器18的回弹阻尼减小至零或大致为零。
图15示出了指示车辆比如车辆10的压缩阻尼特性和回弹阻尼特性的曲线图525的示例。曲线图525仅是悬架控制器86在不同时间段上设定的可能的压缩阻尼特性和回弹阻尼特性的一个示例。曲线图525示出了三个阶段,离地前(例如,在空中前)阶段530、自由降落阶段535、以及着陆后阶段540。最初,在离地前阶段期间,可调节减震器18的回弹阻尼550和压缩阻尼555是稳定的。当发生空中事件时,悬架控制器86在自由降落阶段535上逐渐增加压缩阻尼55,并将回弹阻尼550降低到大致为零。着陆后阶段540将在下面讨论。
返回参照图14,在步骤510处,悬架控制器86可以确定着陆事件是否已经发生。例如,类似于步骤506,悬架控制器86可以基于x轴加速度值、y轴加速度值和/或z轴加速度值的大小来确定着陆事件是否正在发生。例如,悬架控制器86可以将x轴加速度值、y轴加速度值和/或z轴加速度值与一个或更多个阈值(例如,一个或更多个预定义的、预编程的和/或用户定义的阈值)进行比较,以确定车辆10是否已经着陆。如果x轴加速度值、y轴加速度值和/或z轴加速度值大于该一个或更多个阈值,则方法500可以移至步骤508。如果x轴加速度值、y轴加速度值和/或z轴加速度值小于阈值,则步骤510可以重复进行。
在一些示例中,悬架控制器86可以使用与步骤506中的阈值相同的阈值。例如,如上所述,在自由降落中,底盘加速度计30和/或IMU 37可以测量车辆10在x轴线和y轴线上具有零或大致为零的加速度,而在z轴线上具有1G或大致为1G的加速度。如此,悬架控制器86可以基于确定x轴线和/或y轴线上的加速度值是否大于第一阈值(例如,3G)和/或z轴线上的加速度值是否大于第二阈值来确定着陆事件是否正在发生。在一些情况下,悬架控制器86可以对关于x轴加速度、y轴加速度和z轴加速度的加速度大小进行组合(例如,计算),并且将组合的大小与阈值进行比较,以确定车辆10是否已经着陆。
在步骤512处,悬架控制器86可以确定空中事件的持续时间(例如,车辆10处于自由降落中的持续时间)。例如,悬架控制器86可以包括计时器,并且可以使用计时器来确定在步骤506处检测到空中事件与在步骤510处检测到着陆事件之间的持续时间。
在步骤514处,悬架控制器86可以执行用于可调节减震器18中的一个或更多个可调节减震器的着陆状况修正器。例如,悬架控制器86可以向可调节减震器18提供信息(例如,一个或更多个命令)用以将压缩阻尼和/或回弹阻尼调节至着陆后设定点一段时间。例如,悬架控制器86可以将回弹阻尼增加一段时间。同样,悬架控制器86可以将压缩阻尼维持在着陆后设定值处一段时间。通过维持压缩阻尼,车辆10能够更容易地度过冲击的着陆压缩冲程。
在步骤516处,悬架控制器86可以执行正常状况修正器。例如,悬架控制器86可以将压缩阻尼和/或回弹阻尼调节回至正常位置(例如,调节回至离地前位置)。例如,悬架控制器可以将回弹阻尼降低和/或逐渐降低回至正常设定值(例如,离地前回弹阻尼设定值)。另外,悬架控制器86可以将压缩阻尼降低回至正常设定值(例如,离地前压缩阻尼设定值)。
在一些变型中,悬架控制器86可以基于空中事件的持续时间来调节着陆后压缩阻尼设定值和/或回弹阻尼设定值。返回参照图15,压缩阻尼555正在逐渐增加,并且随着空中事件的持续时间增加而增加。如此,在着陆后阶段540期间,悬架控制器86可以基于空中事件来维持增加的压缩阻尼555。另外,和/或替代性地,悬架控制器86可以基于空中事件的持续时间来改变持续时间以维持增加的压缩阻尼555。例如,车辆10可能遇到小的隆起(例如,空中事件小于三百毫秒)。在这种情况下,悬架控制器86可以将空中事件的持续时间与阈值(例如,预编程的、预定义的和/或用户定义的阈值)进行比较。如果空中事件的持续时间小于阈值,则悬架控制器86可能不会维持增加的压缩阻尼555。相反,悬架控制器86可以响应于检测到着陆事件而将压缩阻尼减小和/或逐渐减小回至离地前530压缩阻尼555。
在一些示例中,如果空中事件的持续时间大于阈值,则悬架控制器86可以将增加的压缩阻尼555维持一段时间。在一些情况下,悬架控制器86可以基于空中事件的持续时间来确定维持增加的压缩阻尼555的时间段(例如,空中事件的持续时间越长,维持增加的压缩阻尼555的时间段越长)。
响应于检测到着陆事件(例如,着陆后阶段540的开始),悬架控制器86可以基于空中事件的持续时间来增加回弹阻尼550。例如,传统上,车辆10倾向于卸载轮胎(例如,车轮很轻)和/或在着陆时执行跳动。为了防止轮胎跳动或卸载,悬架控制器86基于空中事件的持续时间来增加可调节减震器18的回弹阻尼550(例如,随着空中事件的持续时间增加,回弹阻尼550在着陆之后增加)。在设定的时间段之后(例如,在车辆10完成其第一冲击压缩和回弹周期之后),悬架控制器86将回弹阻尼550降低和/或逐渐降低回至离地前阶段530的回弹阻尼设定值。通过增加回弹阻尼550,悬架控制器86减少了车辆10的跳动/卸载,从而导致着陆事件的稳定性和/或牵引力增加。
在一些示例中,车辆10可能遇到小的隆起或山丘,车辆10可能不会在着陆时执行跳动或在着陆时执行小的跳动。在这种示例中,悬架控制器86可以基于将空中事件的持续时间与阈值进行比较来调节压缩阻尼特性和/或回弹阻尼特性。例如,悬架控制器86可能不增加回弹阻尼550,并且相反地,响应于检测到着陆事件而将回弹阻尼550设定为离地前阶段530的回弹阻尼设定值。
另外,和/或替代性地,基于空中事件的持续时间,悬架控制器86可以将前部可调节减震器18和/或后部可调节减震器18的压缩阻尼和/或回弹阻尼偏置。例如,基于检测到空中事件的持续时间低于阈值(例如,车辆10遇到小的隆起或山丘),悬架控制器86可以另外针对后部可调节减震器18c和18d的着陆后回弹值增加回弹阻尼。响应于检测到空中事件而偏置前部减震器18和/或后部减震器18可以在行驶通过崎岖的地形时增加车辆10的稳定性和/或辅助车辆10。
图16示出了描述悬架控制器86在攀爬操作期间的操作的示例流程图。图17至图20示出了悬架控制器86在攀爬操作期间调节车辆10的可调节减震器18的示例。
通过在攀爬操作期间调节一个或更多个可调节减震器18的压缩阻尼和/或回弹阻尼,悬架控制器86可以增加在遇到岩石时的车辆10稳定性。例如,基于接收到的信息(例如,纵向加速度、横向加速度车辆速度、发动机速度和/或侧倾角),悬架控制器86可以确定车辆10的取向(例如,车辆10是否在平坦的地面上、是否面向上坡、是否面向下坡、乘客侧是否面向下坡、和/或驾驶员侧是否面向下坡)。基于车辆10的取向,悬架控制器86可以调节压缩阻尼和/或回弹阻尼以使车辆10倚靠在山丘和/或岩石中,从而导致车辆10在穿越障碍物时减小总的俯仰/侧倾角。另外,通过在车辆10处于平坦的地面上时调节压缩阻尼和/或回弹阻尼,车辆10具有增加的地面间隙。
在操作中,在步骤602处,悬架控制器86可以从车辆10的一个或更多个实体(例如,传感器、设备和/或子系统)接收信息(例如,输入信息)。例如,悬架控制器86可以从上述一个或更多个传感器、设备和/或子系统接收(例如,检索和/或获得)信息(例如,指示传感器读数的数据包和/或信号)。在一些情况下,悬架控制器86可以从例如IMU 37和/或底盘加速度计30的传感器接收纵向加速度率和/或横向加速度率。在一些示例中,悬架控制器86可以从例如陀螺仪31的传感器接收俯仰率、侧倾率、俯仰角、侧倾角和/或横摆率。在一些情况下,悬架控制器86可以从例如车辆速度传感器26的传感器接收车辆速度。
在一些示例中,悬架控制器86可以接收指示车辆10的操作模式的信息。例如,悬架控制器86可以从操作者界面22和/或另一控制器(例如,控制器20)接收指示操作模式的信息。例如,操作者界面22可以接收指示攀爬模式的选择的用户输入。操作者界面22可以将用户输入提供给悬架控制器86。悬架控制器86可以基于用户输入配置成在攀爬模式下进行操作。
在步骤604处,悬架控制器86可以确定车辆10是否处于攀爬模式。例如,基于指示操作模式的信息,悬架控制器86可以确定车辆10是否处于攀爬模式。如果车辆10处于攀爬模式,则方法600可以移至步骤606。如果车辆10未处于攀爬模式,则方法600可以返回至步骤602。
在步骤606处,悬架控制器86可以确定车辆速度是否低于阈值。例如,悬架控制器86可以将车辆速度与阈值进行比较。如果车辆速度小于阈值,则方法600可以移至步骤608。如果车辆速度不小于阈值,则方法600可以返回步骤602。换句话说,悬架控制器86可以在攀爬模式下进行操作,并在低的车辆速度下提供攀爬状况修正器。在较高的车辆速度下,悬架控制器86可能不会在攀爬模式下进行操作。相反,在较高的车辆速度下,悬架控制器86可以在不同的操作模式下进行操作,例如在正常模式或舒适模式下进行操作。在一些情况下,悬架控制器86可以使用发动机速度而不是车辆速度来确定是否在攀爬模式下进行操作和/或是否提供攀爬状况修正器。
在步骤608处,悬架控制器86可以确定车辆10的取向。例如,基于x轴加速度值、y轴加速度值和/或z轴加速度值的大小,悬架控制器86可以确定车辆10的纵向加速度和/或横向加速度。使用纵向加速度和/或横向加速度,悬架控制器86可以确定车辆10的侧倾角和/或俯仰角。然后,基于车辆的侧倾角和/或俯仰角,悬架控制器86可以确定车辆10是否在平坦的表面上、车辆10的前部是否面向上坡、车辆10的前部是否面向下坡、车辆10的乘客侧是否面向下坡、和/或车辆10的驾驶员侧是否面向下坡。另外,和/或替代性地,悬架控制器86可以基于来自陀螺仪31和/或IMU 37的侧倾率来确定取向,例如车辆10的乘客侧是否面向下坡和/或车辆10的驾驶员侧是否面向下坡。
在步骤610处,悬架控制器86可以执行攀爬状况修正器。例如,基于车辆10的取向,悬架控制器86可以提供用于调节可调节减震器18中的一个或更多个可调节减震器的压缩阻尼和/或回弹阻尼的信息(例如,一个或更多个命令)。在一些示例中,悬架控制器86可以增加下坡可调节减震器18的压缩阻尼。另外,和/或替代性地,悬架控制器86可以增加上坡可调节减震器18的回弹阻尼并且/或者降低上坡可调节减震器18的压缩阻尼。
图17至图20示出了使用方法600的可调节减震器18的回弹阻尼特性和压缩阻尼特性的示例。图17示出了车辆10在平坦的地面上的压缩阻尼特性和/或回弹阻尼特性。例如,在步骤608处,悬架控制器86可以(例如,基于纵向加速度值和/或横向加速度值)确定车辆10在平坦的地面上。基于车辆10的取向,悬架控制器86可以提供用于调节车辆10的阻尼特性的信息(例如,一个或更多个命令)。例如,悬架控制器86可以提供用于增加可调节减震器18a、18b、18c和18d的压缩阻尼及用于降低可调节减震器18a、18b、18c和18d的回弹阻尼的信息302、304、306、308。通过调节压缩阻尼和回弹阻尼,悬架控制器86可以使地面间隙最大化以避开障碍物、可以避免在处于平坦的地面上时的完全刚性压缩以消除不必要的不平稳性、并且可以允许地面接合构件12更快地落入地面中的孔中,从而不会使车辆10翻倒。
图18示出了在车辆10的前部面向下坡时车辆10的压缩阻尼特性和/或回弹阻尼特性。例如,在步骤608处,悬架控制器86可以(例如,基于纵向加速度值和/或横向加速度值)确定车辆10面向下坡。基于车辆10的取向,悬架控制器86可以提供用于调节车辆10的阻尼特性的信息(例如,一个或更多个命令)。例如,悬架控制器86可以提供用于增加可调节减震器18a和18b(例如,面向下坡的减震器)的压缩阻尼的信息302和304。另外,悬架控制器86可以提供用于增加可调节减震器18c和18d(例如,面向上坡的减震器)的回弹阻尼并且/或者降低可调节减震器18c和18d的压缩阻尼的信息306和308。
图19示出了在车辆10的前部面向上坡时车辆10的压缩阻尼特性和/或回弹阻尼特性。例如,在步骤608处,悬架控制器86可以(例如,基于纵向加速度值和/或横向加速度值)确定车辆10面向上坡。基于车辆10的取向,悬架控制器86可以提供用于调节车辆10的阻尼特性的信息(例如,一个或更多个命令)。例如,悬架控制器86可以提供用于增加可调节减震器18a和18b(例如,面向上坡的减震器)的回弹阻尼并且/或者降低可调节减震器18a和18b的压缩阻尼的信息302和304。另外,悬架控制器86可以提供用于增加可调节减震器18c和18d(例如,面向下坡的减震器)的压缩阻尼的信息306和308。
图20示出了在车辆10的乘客侧面向下坡时车辆10的压缩阻尼特性和/或回弹阻尼特性。例如,在步骤608处,悬架控制器86可以(例如,基于横向加速度值和/或纵向加速度值)确定车辆10的乘客侧面向下坡。基于车辆10的取向,悬架控制器86可以提供用于调节车辆10的阻尼特性的信息(例如,一个或更多个命令)。例如,悬架控制器86可以提供用于增加可调节减震器18b和18d(例如,面向下坡的减震器)的压缩阻尼的信息304和308。另外,悬架控制器86可以提供用于增加可调节减震器18a和18c(例如,面向上坡的减震器)的回弹阻尼并且/或者降低可调节减震器18a和18c的压缩阻尼的信息302和306。
在一些变型中,车辆10的一部分、例如车辆10的前部的乘客侧面向下坡。换句话说,车辆10可以成一定角度,使得一个车轮(例如,右前地面接合构件12b)面向下坡,且一个车轮(例如,左后地面接合构件12c)面向上坡。在这种情况下,在步骤608处,悬架控制器86可以基于纵向加速度值和/或横向加速度值确定俯仰角和/或侧倾角。基于俯仰角和侧倾角,悬架控制器86可以确定车辆的取向(例如,右前地面接合构件12b面向的取向)。基于车辆10的取向,悬架控制器86可以提供用于增加可调节减震器18b(例如,面向下坡的减震器)的压缩阻尼的信息304。另外,悬架控制器86可以提供用于增加可调节减震器18c(例如,面向上坡的减震器)的回弹阻尼并且/或者降低可调节减震器18c的压缩阻尼的信息306。另外,和/或替代性地,基于取向的角度,悬架控制器86可以提供用于维持和/或降低可调节减震器18a(例如,既不处于上坡也不处于下坡的减震器)的回弹阻尼的信息302;并且/或者用于维持和/或增加可调节减震器18a的压缩阻尼的信息302。另外,和/或替代性地,基于取向的角度,悬架控制器86可以提供用于降低可调节减震器18d(例如,既不处于上坡也不处于下坡的减震器)的回弹阻尼和/或维持可调节减震器18d的压缩阻尼的信息308。
在一些情况下,在车辆10处于攀爬模式时,悬架控制器86如图17所示可以增加、降低并且/或者保持压缩阻尼和/或回弹阻尼。另外,响应于确定了车辆10的取向(例如,步骤608),悬架控制器86如图18至图20所示可以另外地增加并且/或者降低压缩阻尼和/或回弹阻尼。换句话说,在这种情况下,如图18至图20所示的压缩阻尼/回弹阻尼的增加、降低和/或维持是以图17的压缩阻尼/回弹阻尼为基础的。
图21示出了描述悬架控制器86在滑坡事件期间的操作的示例流程图。图22和图23示出了悬架控制器86在滑坡事件期间调节车辆10的可调节减震器18的示例。通过在前部上坡滑动事件期间调节阻尼,车辆10可以更好地倚靠在山丘或沙丘中、更好地保持在陡峭的斜坡上、并且/或者在穿越山丘或沙丘时为用户提供更顺畅的驾乘(例如,更少的损伤)。通过在前部下坡滑动事件期间调节阻尼,车辆10可以更好地倚靠在山丘或沙丘中、增加车辆稳定性、并且/或者使车辆更容易穿越返回上坡。滑坡事件是在车辆10穿越斜坡(例如,山丘、沙丘、坡道)并开始沿至少一个方向滑动时的任何事件。
在操作中,在步骤652处,悬架控制器86可以从一个或更多个传感器、例如转向传感器28接收转向信息。转向信息可以指示方向盘、例如方向盘226的转向位置(例如,转向角)。转向位置和/或转向角可以指示车辆10的方向盘的位置和/或角度。转向率可以指示方向盘的位置和/或角度在一段时间内的变化。
在步骤654处,悬架控制器86可以从一个或更多个传感器、例如陀螺仪31和/或IMU37接收横摆率信息。横摆信息指示车辆10的横摆率。
在步骤656处,悬架控制器86可以从例如IMU 37和/或底盘加速度计30的一个或更多个传感器接收指示车辆10的加速度率或减速度率的加速度信息。加速度信息可以指示车辆的多轴加速度值,例如纵向加速度和/或横向加速度。在一些示例中,悬架控制器86可以从例如节气门位置传感器34和/或加速器踏板传感器33的另一传感器接收信息。悬架控制器86使用该信息来确定加速度率。例如,悬架控制器86可以使用来自节气门位置传感器的节气门位置和/或来自加速度踏板传感器的加速器踏板230的位置来确定车辆10是否正在加速和/或减速。
在步骤658处,悬架控制器86可以从操作者界面22和/或一个或更多个其他控制器(例如,控制器20)接收车辆10的操作模式。每种模式可以包括回弹阻尼和/或压缩阻尼的不同设定值。操作者(例如,用户)可以在操作者界面22上输入操作模式。操作者界面22可以向控制器20和/或悬架控制器86提供指示操作模式的用户输入。悬架控制器86可以使用用户输入来确定车辆10的操作模式。
在步骤660处,悬架控制器86可以确定滑坡事件(例如,车辆10在穿越斜坡时是否滑动)是否正在发生。例如,悬架控制器86可以基于指示转向率、转向角和/或转向位置的转向信息;指示横摆率的横摆率信息;指示横向加速度和/或纵向加速度的加速度信息;和/或其他信息(例如俯仰角或俯仰率)来确定滑坡事件。悬架控制器86可以将转向率、转向角、转向位置、横摆率、横向加速度和/或纵向加速度与一个或更多个阈值(例如,预定的、预编程的和/或用户定义的阈值)进行比较以确定滑坡事件。如果悬架控制器86确定车辆10处于滑坡事件,则方法650可以移至步骤662。如果悬架控制器86确定车辆10未处于滑坡事件,则方法可以移至步骤652。
在一些情况下,滑坡事件的检测可以类似于拐弯事件的检测。另外,基于滑坡事件的检测来调节减震器18的阻尼的命令可以类似于拐弯事件。例如,悬架控制器86可以优先处理转向信息、横摆率信息和/或加速度信息以确定滑坡事件。换句话说,转向位置和/或转向角、转向率、横摆率和/或横向加速度可能会冲突,并且悬架控制器86可以使横向加速度优先于转向位置、转向角、转向率和/或横摆率。例如,即使横摆率、转向率、转向角和/或转向位置未超过其对应的阈值,悬架控制器86也可以基于横向加速度值超过(例如,高于或低于)横向加速度阈值来确定滑坡事件正在发生。
在一些示例中,悬架控制器86可以使用车辆速度和/或发动机速度来确定车辆10是否处于滑坡事件。例如,悬架控制器86可以将车辆速度和/或发动机速度与阈值进行比较。如果悬架控制器86确定车辆速度和/或发动机速度大于阈值(例如,车辆10以高的车辆速度行驶),则方法650可以移至662。否则,方法650可以返回至652。换句话说,悬架控制器86可以在车辆以高的车辆速度移动时执行滑坡状况修正器。
在步骤662处,悬架控制器86可以确定滑动的方向。例如,基于横向加速度,悬架控制器86可以确定车辆10是向左侧滑坡还是向右侧滑坡。
在步骤664处,悬架控制器86可以确定车辆10的取向。例如,类似于步骤608,基于纵向加速度和/或横向加速度,悬架控制器86可以确定车辆10的前部是否面向上坡、车辆10的前部是否面向下坡、车辆10的乘客侧是否面向下坡、和/或车辆10的驾驶员侧是否面向下坡。
在步骤666处,悬架控制器86可以执行滑坡状况修正器。例如,基于滑动的方向和/或车辆10的取向,悬架控制器86可以提供用于调节一个或更多个可调节减震器18的压缩阻尼和/或回弹阻尼的信息(例如,一个或更多个命令)。例如,基于滑动的方向,悬架控制器86可以增加前面的可调节减震器18上的压缩阻尼并且/或者减小前面的可调节减震器18上的回弹阻尼。另外,和/或替代性地,悬架控制器86可以降低后面的可调节减震器18上的压缩阻尼并且/或者增加后面的可调节减震器18上的回弹阻尼。而且,基于取向(例如,车辆10的前部面向上坡和/或下坡),悬架控制器86还可以将前部减震器18和后部减震器18的压缩阻尼和/或回弹阻尼偏置。换句话说,悬架控制器86可以另外增加下坡可调节减震器18上的压缩阻尼。另外,和/或替代性地,悬架控制器86可以另外降低上坡减震器18的压缩阻尼并且/或者另外增加上坡减震器18的回弹阻尼。随后,方法650可以返回至步骤652。图22和图23将更详细地描述山丘状况修正器。
图22示出了车辆10以向上坡并且向左滑动的方式行驶。例如,悬架控制器86可以基于横向加速度和/或纵向加速度来确定车辆10正在向上坡670行驶并且向左滑动672。悬架控制器86可以以类似于拐弯事件期间的右转弯的方式来调节向左滑动672的压缩阻尼特性和/或回弹阻尼特性。换句话说,悬架控制器86可以增加前面的减震器18a和18c(例如,外部减震器)的压缩阻尼并且/或者降低前面的减震器18a和18c的回弹阻尼。另外,悬架控制器86可以降低前面的减震器18b和18d(例如,内部减震器)的压缩阻尼并且/或者增加前面的减震器18b和18d的回弹阻尼。对于向右滑动,悬架控制器86可以将减震器的压缩阻尼和/或回弹阻尼颠倒过来(例如,降低减震器18a和18c的压缩阻尼并且/或者增加减震器18a和18c的回弹阻尼;增加减震器18b和18d的压缩阻尼并且/或者降低减震器18b和18d的回弹阻尼)。
另外,和/或替代性地,悬架控制器86可以以类似于拐弯事件期间检测加速度的方式来偏置上坡取向670的前部可调节减震器18和/或后部可调节减震器18。例如,基于车辆10的上坡取向,悬架控制器86可以另外增加(例如,通过值或百分比)后部可调节减震器18c和18d(例如,下坡减震器)的压缩阻尼并且/或者另外降低(例如,通过以值或百分比)后部可调节减震器18c和18d(例如,下坡减震器)的回弹阻尼。另外,悬架控制器86可以另外降低前部可调节减震器18a和18b(例如,上坡减震器)的压缩阻尼并且/或者另外增加前部可调节减震器18a和18b(例如,上坡减震器)的回弹阻尼。
在确定了车辆的滑动672和取向670之后,悬架控制器86可以提供用于调节减震器18的信息(例如,一个或更多个命令)。例如,在上坡670和向左滑动672中,悬架控制器86可以提供用于维持或降低可调节减震器18a的回弹阻尼并且/或者维持或增加可调节减震器18a的压缩阻尼的信息302。另外,悬架控制器86可以提供用于增加可调节减震器18b的回弹阻尼并且/或者降低可调节减震器18b的压缩阻尼的信息304。而且,悬架控制器86可以提供用于增加可调节减震器18c的压缩阻尼并且/或者降低可调节减震器18c的回弹阻尼的信息306。另外,悬架控制器86可以提供用于维持或降低可调节减震器18d的压缩阻尼并且/或者增加可调节减震器18d的回弹阻尼的信息308。
图23示出了车辆10以向下坡并且向右滑动的方式行驶。例如,悬架控制器86可以基于横向加速度和/或纵向加速度来确定车辆10正在向下坡674行驶并且向右滑动676。悬架控制器86可以以类似于拐弯事件期间的左转弯的方式来调节向右滑动676的压缩阻尼特性和/或回弹阻尼特性。换句话说,悬架控制器86可以增加前面的减震器18b和18d(例如,外部减震器)的压缩阻尼并且/或者降低前面的减震器18b和18d(例如,外部减震器)的回弹阻尼。另外,悬架控制器86可以降低后面的减震器18a和18c(例如,内部减震器)的压缩阻尼并且/或者增加后面的减震器18a和18c(例如,内部减震器)的回弹阻尼。上面描述了向左滑动672。
另外,和/或替代性地,悬架控制器86可以以类似于拐弯事件期间检测减速度(例如,制动)的方式来偏置下坡取向674的前部可调节减震器18和/或后部可调节减震器18。例如,基于车辆10的下坡取向,悬架控制器86可以另外增加(例如,通过值或百分比)前部可调节减震器18a和18b(例如,下坡减震器)的压缩阻尼并且/或者另外降低(例如,通过值或百分比)前部可调节减震器18a和18b(例如,下坡减震器)的回弹阻尼。另外,悬架控制器86可以另外降低后部可调节减震器18c和18d(例如,上坡减震器)的压缩阻尼并且/或者另外增加后部可调节减震器18c和18d(例如,上坡减震器)的回弹阻尼。
在确定了车辆10的滑动和取向之后,悬架控制器86可以提供用于调节减震器18的信息(例如,一个或更多个命令)。例如,在下坡取向674和向右滑动676中,悬架控制器86可以提供用于降低或维持可调节减震器18a的压缩阻尼并且/或者增加或维持可调节减震器18a的回弹阻尼的信息302。另外,悬架控制器86可以提供用于增加可调节减震器18b的压缩阻尼并且/或者降低可调节减震器18b的回弹阻尼的信息304。而且,悬架控制器86可以提供用于降低可调节减震器18c的压缩阻尼并且/或者增加可调节减震器18c的回弹阻尼的信息306。另外,悬架控制器86可以提供用于维持或增加可调节减震器18d的压缩阻尼并且/或者降低或维持可调节减震器18d的回弹阻尼的信息308。
图24示出了示例性流程图,该流程图图示了用于执行车辆的惯性测量值的实时校正的方法。例如,IMU 37、陀螺仪31和/或底盘加速度计30可以测量车辆10的惯性测量值(例如,车辆10的加速度和/或角速度或速率)。在一些示例中,这些传感器可能不在车辆10的重心(CG)处,并且可以使用运动学变换来解决传感器不在CG处的问题。例如,如悬架控制器86的控制器可以使用传感器(例如,IMU 37、陀螺仪31和/或底盘加速度计30)与车辆10的CG之间的距离来确定偏移校正信息。使用偏移校正信息,悬架控制器86可以将测量的加速度值转换(例如,确定和/或计算)为CG加速度值(例如,估计的CG加速度)。另外,和/或替代性地,车辆10的CG也可能受到用户和/或货物的数量的影响。例如,驾驶员和乘客可以改变车辆10的CG。如此,悬架控制器86可以接收用户和/或货物信息,并使用用户和/或货物信息来确定第二偏移校正信息。悬架控制器86可以使用第一偏移校正和/或第二偏移校正来确定CG加速度值。
通过提供车辆10的惯性测量值的实时校正,悬架控制器86可允许IMU 37和/或其他传感器位于车辆10的CG以外的位置,同时仍为控制件提供准确的车辆惯性测量值估计。另外,和/或替代性地,悬架控制器86可以在给定关于车辆10的重量(例如,驾乘者)和/或重量的位置(例如,驾乘者的位置)的附加信息的情况下允许更准确的估计。下面将参照图25描述图24。
图25示出了示意性框图,该框图图示了悬架控制器86中的逻辑部件的示例。例如,悬架控制器86包括一个或更多个逻辑部件,如加速度和/或速度测量逻辑720、角加速度逻辑722、角加速度计算逻辑724、运动学函数逻辑726、重心(CG)处的估计加速度逻辑728、基于用户信息或货物信息的偏移校正逻辑730和/或基于传感器信息的偏移校正逻辑732。逻辑720、722、724、726、728、730和/或732是任何合适的逻辑配置,包括但不限于一个或更多个状态机、执行内核的处理器和/或根据需要的其他合适的结构。
另外,在一些示例中,悬架控制器86和/或控制器20可以包括存储器和一个或更多个处理器。存储器可以存储计算机可执行指令,该计算机可执行指令在由所述一个或更多个处理器执行时使处理器实施本文所讨论的方法和过程,包括方法700。另外,在实施方式中,图25中所描绘的各种部件(例如,逻辑)与图25中所描绘的其他部件中的各种部件(和/或未图示的部件)一体地结合,所有这些都被认为在本公开的范围内。
在操作中,在步骤702处,悬架控制器86(例如,逻辑720)可以从车辆10的一个或更多个实体(例如,传感器、设备和/或子系统)接收车辆运动信息。例如,悬架控制器86可以从一个或更多个传感器接收指示车辆10的加速度和/或速度的车辆运动信息。例如,逻辑720可以从例如IMU 37和/或底盘加速度计30的传感器接收x轴加速度值、y轴加速度值和/或z轴加速度值(例如,线性加速度值)。逻辑720还可以从例如IMU37和/或陀螺仪31的传感器接收x轴角速度值、y轴角速度值和/或z轴角速度值。
在步骤704处,悬架控制器86(例如,逻辑730)可以从车辆10的一个或更多个实体(例如,传感器、设备和/或子系统)接收用户信息或货物信息。在一些情况下,悬架控制器86可以从操作者界面22接收用户信息或货物信息。例如,操作者界面22可以向悬架控制器86提供指示车辆10中的驾乘者数量和/或与车辆10中的驾乘者对应的重量或质量的用户信息。另外,和/或替代性地,操作者界面22可以向悬架控制器86提供指示车辆10正在运载的货物的重量或质量的货物信息。
在一些示例中,悬架控制器86可以从一个或更多个传感器接收用户信息或货物信息。例如,一个或更多个传感器、例如安全带传感器可以向悬架控制器86提供指示车辆10中的驾车者数量的信息(例如,当用户戴上他们的安全带时,安全带传感器可以提供指示安全带接合至悬架控制器86的信息)。
在步骤706处,悬架控制器86(例如,逻辑722和/或724)可以确定车辆10的角加速度。例如,逻辑722可以过滤从例如IMU 37和/或陀螺仪31的传感器接收的角速度和/或速率。逻辑724可以区分角速率以用于确定角加速度。
在步骤708处,悬架控制器86(例如,逻辑732)可以基于传感器(例如,IMU 37、底盘加速度计30和/或陀螺仪31)与车辆10的CG之间的距离来确定第一偏移校正。车辆10的CG可以被进行预编程和/或预定义。另外,和/或替代性地,悬架控制器86(例如,逻辑732)可以基于传感器(例如,IMU 37、底盘加速度计30和/或陀螺仪31)与悬架控制器86之间的距离来确定第一偏移校正。
在步骤710处,悬架控制器86(例如,逻辑730)可以基于在步骤704处接收的用户和/或货物信息来确定第二偏移校正。例如,基于用户的数量、用户的重量/质量、和/或货物的重量/质量,逻辑730可以确定第二偏移校正。
在步骤712处,悬架控制器86(例如,逻辑726和/或728)可以确定在车辆10的CG处的估计加速度。例如,逻辑726可以从逻辑720(例如,线性加速度值)、逻辑724(例如,确定的角加速度值)、逻辑730(例如,基于用户信息或货物信息的第二偏移)和/或逻辑732(例如,基于传感器信息的第一偏移)接收信息。逻辑726可以使用运动学函数来确定车辆10的CG处的3轴估计加速度。逻辑726可以将车辆10的CG处的3轴估计加速度提供给逻辑728。方法700可以返回到步骤702,并且可以连续地重复。
在一些示例中,逻辑726可以在车辆10的CG处接收和/或存储3轴(例如,x轴线、y轴线和/或z轴线)估计加速度值。另外,和/或替代性地,方法400、500和/或700可以使用在车辆10的CG处的确定的估计加速度值来执行拐弯状况修正器(例如,步骤418)、制动状况修正器(例如,步骤412)、着陆状况修正器(例如,步骤415)和/或沙丘状况修正器(例如,步骤608)。例如,悬架控制器86可以使用车辆10的CG处的估计加速度值来确定和/或检测事件(例如,拐弯事件、制动事件、着陆事件、空中事件)。另外,和/或替代性地,悬架控制器86可以使用车辆10的CG处的估计加速度值来调节可调节减震器18的压缩阻尼和/或回弹阻尼。
图26示出了描述悬架控制器86当在驾驶员模式之间切换时的操作的示例性流程图。例如,操作者可以使用操作者界面22(例如,触摸屏)和/或物理开关来调整驾驶模式。例如,每个驾驶模式可以指示不同的压缩阻尼设定值和/或回弹阻尼设定值。如以下将说明的,悬架控制器86可以接收一个或更多个用户输入,并且可以基于用户输入改变驾驶模式。响应于改变驾驶模式,悬架控制器86可以提供用于调节可调节减震器18的压缩阻尼和/或回弹阻尼的一个或更多个命令。下面将参照图27和图28来描述图26。
图27示出了用于调节驾驶模式的示例性物理开关820。在一些示例中,物理开关820可以位于方向盘上、例如方向盘226上。物理开关820可以操作性地联接至悬架控制器86并且/或者与悬架控制器86通信。例如,悬架控制器86可以从物理开关820接收用户输入。开关820可以包括增加模式(+)按钮822(例如,改变输入设备的第一模式)、降低模式(-)按钮824(例如,改变输入设备的第二模式)和/或即时压缩开关826。当由用户致动和/或按下时,即时压缩开关826可以向悬架控制器86提供信息。基于来自即时压缩开关826的信息,悬架控制器86可以向可调节减震器18提供瞬时刚度。换句话说,悬架控制器86可以在短暂的时间内增加和/或显著增加可调节减震器18的压缩阻尼。
图28示出了示例性图形用户界面830。图形用户界面830可以显示在例如操作者界面22的界面上。例如,悬架控制器86可以使图形用户界面830显示在操作者界面22上。图形用户界面830可以包括一个或更多个模式,例如第一驾驶员模式832、第二驾驶员模式834、第三驾驶员模式836、和/或第四驾驶员模式838。图形用户界面830仅是示例性的,并且悬架控制器86可以包括多个驾驶员模式,包括多于或少于四个驾驶员模式。如以下将说明的,悬架控制器86可以接收多个用户输入,并且可以基于接收到的用户输入的数量来调整压缩阻尼特性和/或回弹阻尼特性。示例性的驾驶模式可以包括但不限于舒适模式、粗暴试验模式、操纵模式和/或攀爬模式。
在操作中,在步骤802处,悬架控制器86可以确定其是否已经从物理开关820接收到第一用户输入。例如,用户可以按下(例如,致动)增加模式(+)按钮822和/或降低模式(-)按钮824。物理开关820可以提供指示增加模式(+)按钮822和/或降低模式(-)按钮824的致动的信息。如果悬架控制器86已经接收到第一用户输入,则方法800可以移至步骤804。如果悬架控制器86没有接收到第一用户输入,则方法800可以保持在步骤802处。
在步骤804处,悬架控制器86可以使驾驶模式显示在操作者界面上、例如操作者界面22上。例如,基于从物理开关820接收第一用户输入,悬架控制器86可以使图形用户界面830显示在操作者界面22上。另外,和/或替代性地,图形用户界面830可以指示当前选择的驾驶员模式。
在步骤806处,悬架控制器86可以确定其是否已经接收到新的用户输入。例如,最初,当悬架控制器86接收到第一用户输入时,悬架控制器86可能不改变当前驾驶模式,例如第二驾驶员模式834。相反,如果悬架控制器86接收到两个或更多个用户输入(例如,第一用户输入和一个或更多个新的用户输入),则其可以改变当前驾驶模式。例如,在步骤802处,悬架控制器86可以接收指示增加模式(+)按钮822和/或降低模式(-)按钮824的致动的第一用户输入。在步骤806处,悬架控制器86可以接收指示增加模式(+)按钮822和/或降低模式(-)按钮824的第二致动的用户输入。
在步骤808处,基于新的用户输入,悬架控制器86可以改变请求的驾驶模式。例如,在接收到新的用户输入(例如,按钮822和/或按钮824的第二致动)之后,悬架控制器86可以将所请求的驾驶模式改变为更高或更低的驾驶模式。例如,如果当前驾驶模式是第二驾驶员模式834并且悬架控制器86在步骤806处接收到按钮822的致动,则悬架控制器86可以将所请求的驾驶模式改变为第三驾驶员模式836。如果悬架控制器86接收到按钮824的致动,则悬架控制器86可以将所请求的驾驶模式改变为第一驾驶员模式832。方法800可以返回至步骤806并且重复。在下一次迭代中,悬架控制器86可以接收另一新的用户输入(例如,按钮822和/或按钮824的第三致动)。在步骤808处,悬架控制器86可以基于按钮822或按钮824是否被致动来再次改变所请求的驾驶模式。
在一些情况下,在改变驾驶模式和/或调节可调节减震器18之前,悬架控制器86可以确定上述事件,例如拐弯事件、制动事件、空中事件和/或着陆事件是否正在发生。如果悬架控制器86确定事件正在发生,则悬架控制器86可以延迟和/或不改变主动驾驶模式,直到事件结束为止。例如,如果所请求的驾驶模式是第二驾驶员模式834并且发生事件,则悬架控制器86可以延迟和/或不改变为主动驾驶员模式(例如,第二驾驶员模式834),直到事件结束为止。
返回参照步骤806,如果悬架控制器86没有接收到新的输入,则方法800可以移至步骤810。在步骤810处,悬架控制器86可以确定其尚未接收到新的用户输入的时间量是否超过了计时器例如三秒。如果该时间量尚未超过计时器,则方法800可以返回至806。如果该时间量已经超过计时器,则方法可以移至步骤802并且重复。换句话说,在一段时间(例如3秒)之后,改变驾驶模式特征可能超时,并且用户可能需要提供另一第一输入以再次开始切换驾驶员模式的过程。
在一些示例中,悬架控制器86可以包括用于最高驾驶模式和最低驾驶模式(例如,第一驾驶员模式832和第四驾驶员模式838)的壁。例如,如果当前驾驶模式是第二驾驶员模式834并且悬架控制器86接收到两个以上的用户输入,则悬架控制器86可以将所请求的驾驶模式改变为最高驾驶模式、例如第四驾驶员模式838并且保持在最高驾驶模式处,而无论其他用户输入如何。换句话说,即使用户将增加模式(+)按钮822致动十次,悬架控制器86也可以继续选择最高驾驶模式(例如,另一驾驶员模式838)。
在一些示例中,控制器20可以包括转向控制器102(例如,动力转向控制器)。转向控制器102可以包括用于车辆10的多个动力转向模式。基于方法800,悬架控制器86如上所述可以确定驾驶模式(例如,悬架模式和/或动力转向模式)。悬架控制器86可以基于驾驶模式来调节可调节减震器18。另外,和/或替代性地,悬架控制器86可以将驾驶模式(例如,动力转向模式)提供给转向控制器102。转向控制器102可以基于从悬架控制器86接收到的驾驶模式来改变动力转向特性。在一些情况下,每个悬架模式对应一个或更多个动力转向模式。如此,通过操作者选择悬架模式(例如,使用方法800),操作者还可以选择对应的动力转向模式。因此,悬架控制器86可以将选择的驾驶模式提供给转向控制器102,并且转向控制器102可以实现动力转向模式特性。
车辆10可以包括在转向轴(例如,将方向盘、比如方向盘226连接至车辆框架的轴)上的传感器。例如应变仪或弹簧加载的接触传感器的传感器可以检测方向盘226上的力(例如,推力或拉力)。传感器可以操作性地联接至悬架控制器86并且/或者与悬架控制器86通信,并且可以向悬架控制器86提供指示方向盘226上的推力或拉力的信息。
悬架控制器86可以接收指示推力或拉力(例如,施加在方向盘226上的力)的信息,并且将施加在方向盘上的力与阈值进行比较。基于该比较结果,悬架控制器86可以提供用于瞬时增加可调节减震器18的压缩阻尼的一个或更多个命令(例如,将压缩阻尼设定为刚性阻尼水平)。换句话说,代替使用例如图27所示的即时压缩开关826的按钮,操作者可以推动或拉动方向盘226以引起可调节减震器18的瞬时刚性压缩阻尼。
图29示出了描述用于实现车辆的外出辅助的方法的示例性流程图。例如,操作者可能试图离开车辆、例如车辆10。在这样的示例中,悬架控制器86可以减小可调节减震器18的阻尼(例如,压缩阻尼),从而导致车辆10的高度降低。通过降低车辆高度,操作者可以更容易地离开车辆10。
在操作中,在步骤902处,悬架控制器86可以从车辆10的一个或更多个实体(例如,传感器、设备和/或子系统)接收信息(例如,输入信息)。例如,悬架控制器86可以从所述一个或更多个传感器、设备和/或子系统接收(例如,检索和/或获得)信息(例如,指示传感器读数的数据包和/或信号)。
在步骤904处,悬架控制器86可以确定操作者是否要(例如,打算)离开车辆10。例如,悬架控制器86可以从挡位选择传感器38接收指示车辆已经换挡至停车的信息。基于该信息,悬架控制器86可以确定操作者打算离开车辆10,并且方法900可以移至步骤906。如果悬架控制器86确定操作者不打算离开车辆10,则方法900可以移至步骤902。
在一些情况下,悬架控制器86可以基于发动机速度来确定操作者打算离开车辆。例如,悬架控制器86可以接收指示发动机速度为零或大致为零的信息。这样,悬架控制器86可以确定操作者打算离开车辆。在一些示例中,悬架控制器86可以基于指示车辆钥匙处于关闭位置和/或指示车辆速度(例如,来自车辆速度传感器26)的信息来确定操作者打算离开车辆。
在一些变型中,悬架控制器86可以接收指示车辆10正在上述攀爬模式下操作的信息。在攀爬模式中,车辆速度可以较低和/或大致为零以及/或者车辆可以在岩石上。这样,基于车辆10正在攀爬模式下操作,悬架控制器86可以确定停用外出辅助(例如,不导致车辆10被卡住),并且方法900可以返回至步骤902。
在步骤906处,悬架控制器86可以调节可调节减震器18的压缩阻尼。例如,悬架控制器86可以减小可调节减震器18的压缩阻尼。通过减小压缩阻尼,车辆10可以向操作者提供外出辅助(例如,基于降低车辆10的高度)。
图30示出了例如车辆10的车辆的摆动杆的代表性视图。例如,车辆10可以包括摆动杆1005。另外,摆动杆1005可以包括一个或更多个摆动杆可调节减震器1010。摆动杆可调节减震器1010可以联接至摆动杆1005和转向杆1015。摆动杆1005可以处于车辆的后部,并且位于靠近后部可调节减震器、例如减震器18c的位置。另外,车辆10可以包括多于一个的摆动杆1005和/或摆动杆可调节减震器1010。例如,在车辆10的另一侧部(例如,具有可调节减震器18d的侧部)上,车辆10可以包括第二摆动杆1005和/或第二摆动杆可调节减震器1010。
而且,类似于可调节减震器18,悬架控制器86可以提供用于调节摆动杆可调节减震器1010的阻尼特性的一个或更多个命令。例如,参照图11,响应于检测到拐弯事件,悬架控制器86可以提供用于增加和/或接合摆动杆可调节减震器1010的压缩阻尼一个或更多个命令。另外,和/或替代性地,悬架控制器86可以基于驾驶模式提供不同的阻尼特性。例如,在一些驾驶模式中,悬架控制器86可以响应于检测到的事件而增加和/或接合摆动杆可调节减震器1010的压缩阻尼。在其他驾驶模式中,悬架控制器86可能不会响应于检测到的事件而增加或接合摆动杆可调节减震器1010的压缩阻尼。例如,参照图26,基于改变驾驶模式,悬架控制器86可以提供用于调节摆动杆可调节减震器1010的压缩阻尼和/或回弹阻尼的一个或更多个命令。
在美国专利No.9,365,251(于2016年6月14日提交的,题目为“Side-by-sidevehicle(并排式车辆)”)中描述了示例性摆动杆,该专利被转让给本受让人并且全部公开内容通过参引明确地并入本文中。
图31图示了例如雪地机动车1100的示例性车辆1100的视图。如所图示的,车辆1100包括多个地面接合构件12。说明性地,地面接合构件12是履带传动组件1108和一对前滑雪板1112a和1112b。履带传动组件1108操作性地联接至动力系统60(参见图4),以为车辆1100的运动提供动力。车辆还可以包括座椅1102和座椅表面1104。而且,车辆可以包括车把1106。
另外,悬架1114和1116联接至车辆1100的框架以及一对前滑雪板1112a和1112b。悬架1114和1116可以包括可调节减震器、例如可调节减震器1110。而且,履带传动组件1108还可以联接至一个或更多个悬架和/或可调节减震器。
车辆1100可以是与车辆10相同的以及/或者可以包括车辆10的部件。例如,车辆1100可以包括上述多个车辆状况传感器40,并且还可以包括一个或更多个控制器、例如悬架控制器86。悬架控制器86可以从上述多个车辆状况传感器40接收信息。使用接收到的信息,悬架控制器86可以调节可调节减震器、例如如上所述的可调节减震器1110的压缩阻尼和/或回弹阻尼。在美国专利No.9,809,195和美国专利No.8,994,494中提供了关于车辆1100的其他详细信息,这两个专利被转让给本受让人并且这两个专利的全部公开内容通过参引明确地并入本文中。
在实施方式中,大致为零是实际上为零的任何值。例如,大致为零的值与该值为零时相比,在操作方面没有提供可观的差异。
已经仅出于说明和描述的目的而非限制性地呈现了本公开的以上详细描述和其中所描述的示例。因此,可以预期的是,本公开涵盖落入以上公开的和本文所要求保护的基本原理的范围内的任何和所有改型、变型或等同物。
- 具有可调节的压缩阻尼和回弹阻尼的车辆
- 具有可调节回弹阀组件的液压阻尼器