一种非接触式振动信号采集装置
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及信号采集装置领域,尤其是一种非接触式振动信号采集装置。
背景技术
传统的振动信号装置采集一般都是接触式的,其基本原理是:让速度或者加速度传感器接触机械设备的待测部位,然后使设备运转,通过传感器反馈的信号,判断设备是否有故障。
但是传统的传感器存在着许多缺点:(1)接触式的测量会产生振动,会影响测量的精度。(2)有些待测部位工况难以直接安装传感器,普通的传感器难以接触到,所以想要对其进行故障诊断故障也就变得十分困难。
非接触式的振动信号采集装置的优势在于测量方式和工作环境。这种装置通过智能小车的移动抵达一些复杂的难以直接测量的工况环境中(例如高温,振动,有毒环境)用安装在小车上激光位移传感器测量关键部位,保证信号准确性;它的体积适中,可以在一些狭小的空间内工作。保证设备的正常运行,能更好地预防和减少安全事故的发生,保障人身和机械设备的安全。因此对非接触式故障诊断装置进行发展和研究具有重要的现实意义。
发明内容
本发明为解决现有技术缺陷,提供一种结构新颖,使用方便,性能优异的非接触式振动信号采集装置。
为解决上述技术问题本发明的技术方案为:一种非接触式振动信号采集装置,包括连架块、舵机臂、底板、长连杆、从动轮、舵机、主动轮、二级减速器、输入轴、步进电机、升降底板、固定支架、齿条、齿轮、齿轮电机,其特征在于:所述底板前端左右两侧顶部设置有连架块,后端左右两侧顶部设置有二级减速器,中间顶部设置有升降底板和舵机,
所述连架块由长方体一和带弧形顶的长方体二构成,所述长方体一中部设置有相互垂直的通孔一和通孔二,所述长方体二中部设置有圆柱形凸起一,所述通孔一通过螺栓与底板固定,通孔二内侧放置有从动轮转轴,外侧设置有从动轮;
所述长连杆由横向连杆和纵向连杆相互垂直构成,所述横向连杆中央设置有通槽,所述纵向连杆两端设置有通孔三,所述通孔三与圆柱形凸起一相互配合活动固定;
所述舵机臂为长条形结构,其一侧顶端为大圆弧,另一侧顶端为小圆弧,所述大圆弧上设置有通孔四,小圆弧上设置有圆柱形凸起二,所述圆柱形凸起二设置在通槽内,所述舵机臂通过通孔四与舵机固定连接;
所述升降底板为U形长条结构,其底部两侧设置有连接座,所述连接座上设置有带内螺纹的通孔五,所述U形侧边一上设置有凹槽一,所述凹槽一上设置有齿条,所述U形侧边二为梯形结构;
所述固定支架由托盘、立板、连接块构成,所述立板设置在托盘的一侧顶部,所述连接块设置在立板顶部外侧,所述托盘上设置有螺丝孔一,立板上设置有通孔六和螺丝孔二,连接块上设置有梯形凹槽二,所述梯形凹槽二与U形侧边二相互配合活动固定,所述立板内侧的螺丝孔二上设置有齿轮电机,所述齿轮电机的转轴穿过通孔六设置有齿轮,所述托盘上通过螺丝孔一固定有传感器和摄像头;
所述二级减速器内侧通过输入轴与步进电机相连接,外侧设置有主动轮,所述步进电机底部与底板固定。
所述连架块、从动轮、主动轮、二级减速器、输入轴的数量为二个,所述螺丝孔一和螺丝孔二的数量为四个。
本发明的有益效果是:非接触式振动信号采集装置通过摄像头定位,通过激光传感器反馈的信号,判断出机械设备是否有故障。其优势在于结构新颖,使用方便,性能优异,特别适合在一些难以直接安装传感器的空间内工作,在保证设备的正常运行的同时,能更好地预防和减少安全事故的发生,保障人身和机械设备的安全,因此具有广阔的市场空间。
附图说明
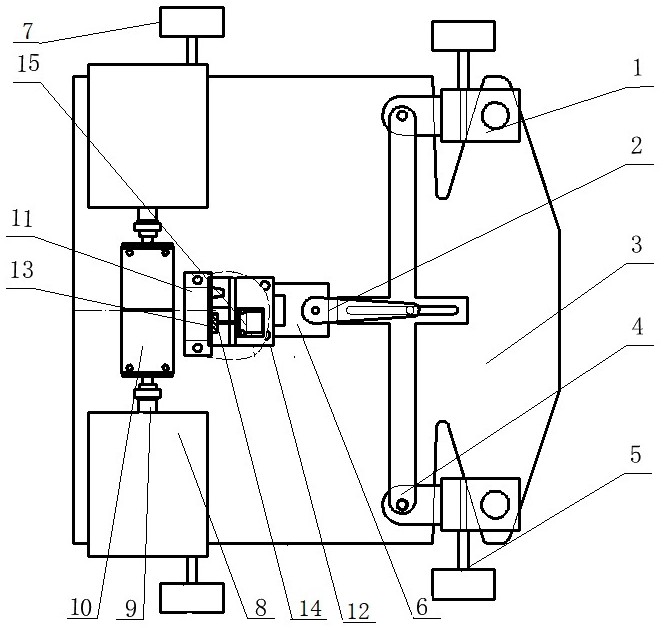
图1是非接触式振动信号采集装置结构主视图;
图2是非接触式振动信号采集装置结构侧视图;
图3是连架块结构主视图;
图4是连架块结构侧视图;
图5是舵机臂结构主视图;
图6是舵机臂结构侧视图;
图7是长连杆结构主视图;
图8是长连杆结构侧视图;
图9是升降底板结构主视图;
图10是升降底板结构俯视图;
图11是固定支架结构主视图;
图12是固定支架结构侧视图。
具体实施方式
下面结合附图1-12具体实施方式对本发明作进一步详细的说明:
一种非接触式振动信号采集装置,包括连架块1、舵机臂2、底板3、长连杆4、从动轮5、舵机6、主动轮7、二级减速器8、输入轴9、步进电机10、升降底板11、固定支架12、齿条13、齿轮14、齿轮电机15,
所述底板3是长方形结构,前端左右两侧顶部通过螺栓固定有连架块1,后端左右两侧顶部通过螺栓固定有二级减速器8,中间顶部通过螺栓固定有升降底板11和舵机6,
所述连架块1由长度为60mm,宽度为40mm,厚度为10mm的长方体一16和长度为45mm,宽度为30mm,厚度为8mm,顶部圆弧半径为30mm的长方体二17构成,所述长方体一16中部浇注有相互垂直的直径为20mm的通孔一38和直径为5mm的通孔二18,所述长方体二17中部浇注有直径为8mm,高度为15mm的圆柱形凸起一19,所述通孔一38内设置有与底板3固定的螺栓,通孔二18内侧放置有从动轮5转轴,外侧设置有从动轮5;
所述长连杆4由长度为100mm,宽度为50mm,厚度为4mm的横向连杆19和长度为360mm,宽度为20mm,厚度为8mm的纵向连杆20相互垂直构成,所述横向连杆19中央设置有长度为42mm,宽度为6mm的通槽21,所述纵向连杆20两端设置有直径为4mm的通孔三38,所述通孔三38与圆柱形凸起一19相互配合活动固定;
所述舵机臂2为长度为105mm,厚度为6mm的长条形结构,其一侧顶端为直径10mm的大圆弧22,另一侧顶端为直径5mm的小圆弧23,所述大圆弧22上浇注有直径为10的通孔四24,小圆弧23上浇注有直径为10mm,高度为8.5mm的圆柱形凸起二25,所述圆柱形凸起二25卡接在通槽21内,所述舵机臂2通过通孔四24与舵机6固定连接;
所述升降底板11为长度为185mm,宽度为31mm 的U形长条结构,其底部两侧浇注有连接座26,所述连接座26上浇注有带内螺纹的通孔五27,所述U形侧边一28上浇注有长度为185mm,宽度为23mm,深度为21.25mm的凹槽一29,所述凹槽一29上卡接有齿条13,所述U形侧边二30为梯形结构;
所述固定支架12由长度为60mm,宽度为43.5mm,厚度为12mm的托盘31、长度为60mm,宽度为60mm,厚度为6mm的立板32、长度为60mm,宽度为20mm,厚度为12mm的连接块33构成,所述立板32浇注在托盘31的一侧顶部,所述连接块33浇注在立板32顶部外侧,所述托盘31上浇注有螺丝孔一34,立板32上浇注有通孔六35和螺丝孔二36,连接块33上浇注有梯形凹槽二37,所述梯形凹槽二37与U形侧边二30相互配合活动固定,所述立板32内侧的螺丝孔二36上通过螺丝固定有齿轮电机15,所述齿轮电机15的转轴穿过通孔六35连接有齿轮14,所述托盘31上通过螺丝孔一34固定有传感器和摄像头;
所述二级减速器8内侧通过输入轴9与步进电机10相连接,外侧设置有主动轮7,所述步进电机10底部与底板3固定。
所述连架块1、从动轮5、主动轮7、二级减速器8、输入轴9的数量为二个,所述螺丝孔一34和螺丝孔二36的数量为四个。
所述传感器为; 基恩士 KEYENCE,FSD22激光位移传感器;
所述摄像头为;基恩士 KEYENCE,ST1微型无线摄像头;
所述舵机为; 深圳市豪仁科技有限公司,MG996R舵机。
本发明非接触式振动信号采集装置的使用原理为:
该信号采集装置前半部分为从动系统和信号采集系统,由舵机6和步进电机10差速控制采集装置平面运动,通过齿轮电机15带动齿轮14旋转在齿条13上位移带动固定支架12纵向运动,收集振动信号。从动轮5两边对称通过连架块1固定于底板3上。舵机6安装在底板3上,长连杆4和连架块1过盈配合。装置后半部分为驱动系统,用两个对称的步进电机10安装于底板3上为主动轮7提供动力。该信号采集装置的固定支架12上安装有摄像头和传感器设备,可沿升降底板11竖直方向移动。
该信号采集装置通过摄像头观察测试点,然后把激光位移传感器传送到竖直方向的合适位置,然后通过摄像头照片不断调整准确定位,再通过激光位移传感器检测信号,最后通过信号分析得到所需要的数据。
以上所述,仅为本发明一个的具体实施方式,但本发明保护范围并不局限于此,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种非接触式振动信号采集装置
- 一种基于超声波的非接触式振动信号测量系统及其测量方法