信息处理装置、非暂时性存储介质以及信息处理方法
文献发布时间:2023-06-19 12:04:09
技术领域
本公开涉及一种用于管理分离型车辆的技术。
背景技术
已知一种将多个单元分离自如地结合而形成的分离型车辆(例如,参照专利文献1)。
现有技术文献
专利文献
专利文献1:德国专利申请公开第102009057693号说明书
发明内容
发明所要解决的问题
本公开的目的在于,提供一种能提高利用分离型车辆的用户的便利性的技术。
用于解决问题的方案
本公开能理解为用于管理分离型车辆的信息处理装置,所述分离型车辆包括:车身单元,具备容纳乘坐者和/或货物的空间;以及底盘单元,形成为自如地与该车身单元结合及分离,并且具备原动机和储藏该原动机的能量源的储藏部。也可以是,该情况下的信息处理装置具备控制部,所述控制部执行:获取能量源余量,该能量源余量是储藏于与规定的车身单元结合的第一底盘单元的储藏部的能量源的余量;以及在所述能量源余量小于规定的阈值的情况下,对所述第一底盘单元发送作为用于从所述车身单元分离的指令的分离指令,并且对能量源的补给已完成的第二底盘单元发送作为用于与所述规定的车身单元结合的指令的结合指令。
本公开也能理解为用于管理分离型车辆的信息处理程序或者储存该信息处理程序的非暂时性存储介质,所述分离型车辆包括:车身单元,具备容纳乘坐者和/或货物的空间;以及底盘单元,形成为自如地与该车身单元结合及分离,并且具备原动机和储藏该原动机的能量源的储藏部。也可以是,该情况下的信息处理程序使计算机执行:获取能量源余量的步骤,该能量源余量是储藏于与规定的车身单元结合的第一底盘单元的储藏部的能量源的余量;以及在所述能量源余量小于规定的阈值的情况下,对所述第一底盘单元发送作为用于从所述车身单元分离的指令的分离指令,并且对能量源的补给已完成的第二底盘单元发送作为用于与所述规定的车身单元结合的指令的结合指令的步骤。
本公开也能理解为用于管理分离型车辆的信息处理方法,所述分离型车辆包括:车身单元,具备容纳乘坐者和/或货物的空间;以及底盘单元,形成为自如地与该车身单元结合及分离,并且具备原动机和储藏该原动机的能量源的储藏部。也可以是,在该情况下的信息处理方法中,计算机执行:获取能量源余量的步骤,该能量源余量是储藏于与规定的车身单元结合的第一底盘单元的储藏部的能量源的余量;以及在所述能量源余量小于规定的阈值的情况下,对所述第一底盘单元发送作为用于从所述车身单元分离的指令的分离指令,并且对能量源的补给已完成的第二底盘单元发送用于与所述规定的车身单元结合的指令的结合指令的步骤。
发明效果
根据本公开,能提供一种能提高利用分离型车辆的用户的便利性的技术。
附图说明
图1是表示车辆管理系统的概要的图。
图2是表示分离型车辆的概略构成的第一图。
图3是表示分离型车辆的概略构成的第二图。
图4是表示底盘单元、车身单元以及服务器装置的硬件构成的图。
图5是表示底盘单元的功能构成例的框图。
图6是表示服务器装置的功能构成例的框图。
图7是表示底盘单元信息表的构成例的图。
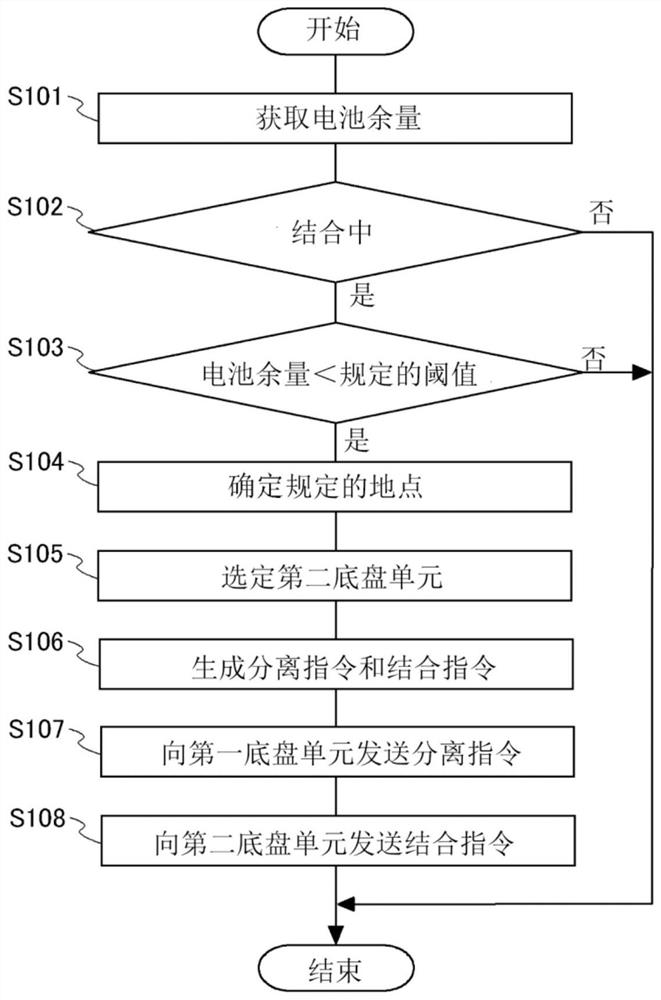
图8是表示由服务器装置进行的处理的流程的流程图。
附图标记说明
1:分离型车辆;
100:底盘单元;
100A:第一底盘单元;
100B:第二底盘单元;
106:驱动部;
107:电池;
F110:运行计划生成部;
F120:环境检测部;
F130:行驶控制部;
F140:结合控制部;
F150:电池余量检测部;
200:车身单元;
300:服务器装置;
301:处理器;
302:主存储部;
303:辅助存储部;
304:通信部;
D310:底盘单元管理数据库;
F310:电池余量获取部;
F320:指令生成部。
具体实施方式
本公开的特征在于,若与规定的车身单元结合的底盘单元的能量源余量小于规定的阈值,则将与该规定的车身单元结合的底盘单元自动地更换为其他的底盘单元。
此处所说的“能量源”是用于使搭载于底盘单元的原动机工作的能量源。例如,在底盘单元的原动机是内燃机或内燃机与电动马达的混合动力机构的情况下,燃料(汽油或轻油等)相当于能量源。此外,在底盘单元的原动机是电动马达的情况下,电相当于能量源。“能量源余量”是储藏在搭载于底盘单元的储藏部的能量源的余量。在此,在底盘单元的原动机是内燃机的情况下,储藏于储藏部(燃料箱)的燃料的余量相当于能量源余量。此外,在底盘单元的原动机是电动马达的情况下,储藏部(电池)的充电余量(电池余量)相当于能量源余量。
若底盘单元的能量源余量变少,则需要使分离型车辆(或底盘单元)移动至补给设施(例如,充电设施或供油设施等)来进行对底盘单元的能量源的补给。由此,用户的时间上的负担可能会增加。此外,在底盘单元的原动机是电动马达的情况下,如果在用户的自己家周边没有充电设施,则需要在自己家设置充电设施。由此,用户的经济上的负担可能会增加。
对此,在本公开中,利用分离型车辆的特性,将能量源余量已变少的底盘单元自动地更换为能量源的补给已完成的状态的底盘单元。能量源的补给已完成的状态是指能量源被补给至储藏部装满的程度的状态。
具体而言,在本公开的信息处理装置中,控制部首先获取与规定的车身单元结合的底盘单元(第一底盘单元)的能量源余量。例如,也可以是,控制部按规定的周期与第一底盘单元进行通信,由此获取该第一底盘单元的能量源余量。作为其他方法,也可以是,在第一底盘单元中感测到能量源余量减少到小于规定的阈值时,从第一底盘单元向信息处理装置发送与能量源余量相关的信息,由此控制部获取能量源余量。
在如上述那样获取到的能量源余量小于规定的阈值的情况下,控制部向第一底盘单元发送分离指令,并且向第二底盘单元发送结合指令。分离指令是用于使第一底盘单元从规定的车身单元分离的指令。结合指令是用于使第二底盘单元与规定的车身单元结合的指令。第二底盘单元是能量源的补充已完成的底盘单元。
接到分离指令的第一底盘单元使该第一底盘单元从规定的车身单元分离。此时,将第一底盘单元与规定的车身单元分离的作业也可以通过搭载升降机或起重机等重型机械的外部设备来进行。此外,将第一底盘单元与规定的车身单元分离的作业也可以通过搭载于第一底盘单元或规定的车身单元的设备来进行。如此,当第一底盘单元与规定的车身单元分离时,规定的车身单元成为能与第一底盘单元以外的底盘单元结合的状态。并且,接到结合指令的第二底盘单元使该第二底盘单元与规定的车身单元结合。此时,将第二底盘单元与规定的车身单元结合的作业可以通过上述那样的外部设备来进行,或者也可以通过搭载于第二底盘单元或规定的车身单元的设备来进行。
根据本公开,在底盘单元的能量源余量变少时,分离型车辆的用户能节省进行能量源的补给的工夫。此外,在底盘单元的原动机是电动马达的情况下,也能削减在用户的自己家等设置充电设施的成本。由此,能提高利用分离型车辆的用户的便利性。
在此,第一底盘单元和第二底盘单元可以被配置为通过驾驶员的手动操作来行驶,但也可以被配置为能以自动驾驶方式进行自主行驶。在第一底盘单元和第二底盘单元被配置为能自主行驶的情况下,能不经由人工地进行与规定的车身单元结合的底盘单元的更换。由此,能谋求底盘单元更换作业的效率化。
在此,上述的分离指令例如也可以包括以下的两个指令。
(第一指令)用于使第一底盘单元在规定的地点从规定的车身单元分离的指令
(第二指令)用于使第一底盘单元从规定的地点行驶至规定的补给设施的指令
接到上述的分离指令的第一底盘单元首先按照第一指令进行动作,由此在规定的地点使规定的车身单元与该第一底盘单元分离。此时的规定的地点例如是第一底盘单元的停车场所。需要说明的是,也可以是,如果第一底盘单元处于行驶中,则距离第一底盘单元的当前位置最近的停车场被设定为规定的地点。此外,规定的地点也可以由用户任意地指定。若第一底盘单元在规定的地点从规定的车身单元被分离,则第一底盘单元按照第二指令以自动驾驶的方式自主地行驶,由此移动至规定的补给设施。由此,能不麻烦用户地进行对第一底盘单元的能量源的补给。需要说明的是,能量源的补给完成后的第一底盘单元可以在规定的补给设施待机,或者也可以向规定的保管场所以自动驾驶的方式自主地行驶并在该保管场所被保管。
此外,上述的结合指令例如也可以包括以下的两个指令。
(第三指令)用于使第二底盘单元行驶至规定的地点的指令
(第四指令)用于使第二底盘单元在规定的地点与规定的车身单元结合的指令
接到上述的结合指令的第二底盘单元首先按照第三指令以自动驾驶的方式自主行驶,由此移动至规定的地点。接着,第二底盘单元在到达了规定的地点后按照第四指令进行动作,由此使该第二底盘单元与已从第一底盘单元分离的规定的车身单元结合。由此,规定的车身单元能利用第二底盘单元进行移动。就是说,用户能无需进行对底盘单元的能量源的补给作业地利用分离型车辆。
在此,也可以是,本公开中的控制部将能量源的补给已完成的底盘单元中的位于距离上述规定的地点最近的地点的底盘单元选出来作为第二底盘单元。在该情况下,能将第二底盘单元向规定的地点移动时的所需时间抑制得尽可能短。由此,能尽可能缩短底盘单元的更换所需的时间。
需要说明的是,在第二底盘单元的选出时,用户也可以指定原动机的种类。例如,用户也可以指定搭载内燃机或混合动力机构来作为原动机的底盘单元、或搭载电动马达来作为原动机的底盘单元中的任一种。在该情况下,控制部将搭载用户所期望的原动机的底盘单元并且能量源的补给已完成的底盘单元中的位于距离规定的地点最近的地点的底盘单元选出为第二底盘单元即可。根据上述的构成,例如,在用户预定向充电设施少的区域移动的情况下等,能使搭载内燃机或混合动力机构来作为原动机的底盘单元与规定的车身单元结合。此外,在用户预定向充电设施多的区域移动的情况下等,能使搭载电动马达来作为原动机的底盘单元与规定的车身单元结合。
以下,基于附图对本公开的具体实施方式进行说明。在没有特别记载的情况下,本实施例中记载的构成零件的尺寸、材质、形状、其相对配置等并不意味着将本公开的技术的范围仅限定于此。
<实施方式>
在本实施方式中,对将本公开的信息处理装置应用到用于进行分离型车辆的管理的系统(以下,有时也记为“车辆管理系统”。)的例子进行说明。
(车辆管理系统的概要)
图1是表示车辆管理系统的概要的图。本例中的车辆管理系统被配置为包括分离型车辆1和服务器装置300。如图2和图3所示,分离型车辆1包括:底盘单元100,能通过自动驾驶来自主地行驶;以及车身单元200,装备有用于容纳乘坐者和/或货物的空间。本例中的底盘单元100搭载有作为原动机的电动马达和用于对电动马达供给作为能量源的电的电池(储藏部)。上述的底盘单元100和车身单元200形成为自如地相互结合及分离。图2示出底盘单元100和车身单元200已分离的状态。图3示出底盘单元100和车身单元200已结合的状态。车身单元200与任意的底盘单元100结合,由此能载置乘坐者和/或货物而在道路上移动。
再者,若与车身单元200结合的底盘单元100的电池余量变少,则需要对底盘单元100的电池进行充电。在这种情况下,在本实施方式中,将与车身单元200结合的底盘单元从电池余量已变少的底盘单元向电池的充电已完成的底盘单元进行更换。例如,如图1所示,当与车身单元200结合的第一底盘单元100A的电池余量减少到小于规定的阈值时,第一底盘单元100A被更换为第二底盘单元100B。第二底盘单元100B是电池的充电已完成的底盘单元(电池为满充电状态(被充电至无法进一步充电的量的状态)的底盘单元)。
与车身单元200结合的底盘单元的更换作业在服务器装置300的控制下进行。具体而言,服务器装置300向第一底盘单元100A发送用于在规定的地点使第一底盘单元100A从车身单元200分离的指令(分离指令)。此外,服务器装置300向第二底盘单元100B发送用于在规定的地点使第二底盘单元100B与车身单元200结合的指令(结合指令)。然后,第一底盘单元100A按照分离指令进行动作,由此在规定的地点使该第一底盘单元100A从车身单元200分离。此外,第二底盘单元100B按照结合指令进行动作,由此在规定的地点使该第二底盘单元100B与已从第一底盘单元100A分离的车身单元200结合。需要说明的是,已从车身单元200分离的第一底盘单元100A自主行驶至规定的充电设施。此处所说的“规定的充电设施”例如是用于对底盘单元的电池进行充电的设施中的距离规定的地点最近的设施,是本公开的“规定的补给设施”的一个例子。此外,“规定的地点”是分离型车辆1的停车场所(用户住宅的停车场或移动目的地的停车场等)。需要说明的是,在分离型车辆1处于行驶中的情况下,规定的地点例如是距离分离型车辆1的当前位置最近的停车场。
(车辆管理系统的硬件构成)
接着,对车辆管理系统的构成要素进行详细说明。图4是表示图1所示的底盘单元100、车身单元200以及服务器装置300的硬件构成例的图。需要说明的是,在图4所示的例子中,底盘单元100和车身单元200分别仅图示了1台,但处于服务器装置300的管理下的底盘单元100和车身单元200也可以分别为多台。
分离型车辆1的底盘单元100按照规定的运行指令在道路上自主行驶。这样的底盘单元100被配置为包括处理器101、主存储部102、辅助存储部103、周边状况检测传感器104、位置信息获取部105、驱动部106、电池107以及通信部108等。本例中的底盘单元100是将电动马达1061作为原动机而被驱动的电动汽车。底盘单元100的原动机并不限定于电动马达1061,也可以是内燃机,或者内燃机与电动马达的混合动力机构。
处理器101例如是CPU(Central Processing Unit:中央处理单元)或DSP(DigitalSignal Processor:数字信号处理器)。处理器101控制底盘单元100,进行各种信息处理的运算。主存储部102例如包括RAM(Random Access Memory:随机存取存储器)和ROM(ReadOnly Memory:只读存储器)等。辅助存储部103例如是EPROM(Erasable Programmable ROM:可擦除可编程只读存储器)或硬盘驱动器(Hard Disk Drive:HDD)。此外,辅助存储部303可以包括可移动介质,即可移动记录介质。可移动介质例如是USB(Universal Serial Bus:通用串行总线)存储器或者CD(Compact Disc:光盘)或DVD(Digital Versatile Disc:数字视频光盘)等这样的盘记录介质。
辅助存储部103将各种程序、各种数据以及各种表读写自如地储存于记录介质。在辅助存储部103中储存有操作系统(Operating System:OS)、各种程序以及各种表等。需要说明的是,这些信息的一部分或全部也可以储存于主存储部102。此外,储存于主存储部102的信息也可以储存于辅助存储部103。
周边状况检测传感器104是进行车辆周边的感测的单元,典型的是,周边状况检测传感器104被配置为包括立体摄像机、激光扫描仪、LIDAR(激光雷达)或雷达等。周边状况检测传感器104所获取到的信息被交付给处理器101。
位置信息获取部105是获取底盘单元100的当前位置的设备,典型的是,位置信息获取部105被配置为包括GPS接收器等。需要说明的是,位置信息获取部105按规定的周期获取底盘单元100的当前位置。由位置信息获取部105获取到的位置信息经由后述的通信部108被发送向服务器装置300。就是说,底盘单元100的位置信息按规定的周期从底盘单元100被发送向服务器装置300。由此,服务器装置300能掌握各底盘单元100的当前位置。
驱动部106是使底盘单元100行驶的设备。驱动部106例如被配置为包括作为原动机的电动马达1061、用于对底盘单元100进行制动的制动装置1062以及用于变更车轮的转向角的转向装置1063等。
电池107是蓄存用于向驱动部106的电动马达1061供给的电的二次电池。电池107相当于本公开中的“储藏部”。需要说明的是,在底盘单元100的原动机是内燃机或混合动力机构的情况下,燃料箱作为储藏部而搭载于底盘单元100。
通信部108是用于将底盘单元100连接于网络N1的设备。通信部108例如利用5G(5th Generation:第五代移动通信技术)或LTE(Long Term Evolution:长期演进)等移动通信而连接于网络N1。通信部108也可以利用DSRC(Dedicated Short RangeCommunications:专用短程通信)等窄带通信,或Wi-Fi(注册商标)等而连接于网络N1。由此,通信部108能经由网络N1与其他装置(例如,车身单元200或服务器装置300等)进行通信。例如,通信部108经由网络N1向服务器装置300发送由位置信息获取部105获取到的当前位置信息和电池107的充电余量(电池余量)等。此处所说的网络N1例如是因特网等世界规模的作为公众通信网的WAN(Wide Area Network:广域网)或其他的通信网等。
底盘单元100的硬件构成并不限于图4所示的例子,也可以适当进行构成要素的省略、置换、追加。例如,在底盘单元100也可以搭载有用于进行该底盘单元100与车身单元200的结合作业和分离作业的设备。这样的设备例如是具备升降机或起重机等的重型机械或者电磁铁等。此外,在底盘单元100执行的一系列处理可以通过硬件来执行,但也可以通过软件来执行。
如前述那样,分离型车辆1的车身单元200装备有用于容纳乘坐者和/或货物的空间。这样的车身单元200被配置为包括处理器201、主存储部202、辅助存储部203、位置信息获取部204以及通信部205等。关于处理器201、主存储部202、辅助存储部203、位置信息获取部204以及通信部205,与底盘单元100是同样的,因此省略其说明。
车身单元200的硬件构成并不限于图4所示的例子,也可以适当进行构成要素的省略、置换、追加。此外,在车身单元200执行的一系列处理可以通过硬件来执行,但也可以通过软件来执行。
服务器装置300是用于管理分离型车辆1(底盘单元100和车身单元200)的装置,相当于本公开的“信息处理装置”。服务器装置300具有一般的计算机的构成。即,服务器装置300被配置为包括处理器301、主存储部302、辅助存储部303以及通信部304等。该处理器301、主存储部302、辅助存储部303以及通信部304等相互通过总线连接。处理器301、主存储部302以及辅助存储部303与底盘单元100是同样的,因此省略其说明。通信部304进行外部的装置与服务器装置300之间的信息的收发。通信部304例如是LAN(Local Area Network:局域网)接口板或用于无线通信的无线通信回路。LAN接口板或无线通信回路连接于网络N1。需要说明的是,服务器装置300的硬件构成并不限于图4所示的例子,也可以适当进行构成要素的省略、置换、追加。此外,在服务器装置300执行的一系列处理可以通过硬件来执行,但也可以通过软件来执行。
(底盘单元的功能构成)
在此,基于图5对底盘单元100的功能构成进行说明。如图5所示,本例中的底盘单元100包括运行计划生成部F110、环境检测部F120、行驶控制部F130、结合控制部F140以及电池余量检测部F150来作为其功能构成要素。这些功能构成要素通过处理器101执行存储于主存储部102或辅助存储部103的程序来实现。需要说明的是,运行计划生成部F110、环境检测部F120、行驶控制部F130、结合控制部F140以及电池余量检测部F150中的任一个或其一部分也可以由硬件电路形成。此外,上述的功能构成要素中的任一个或其处理的一部分也可以由连接于网络N1的其他计算机执行。例如,运行计划生成部F110所包含的各处理、环境检测部F120所包含的各处理、行驶控制部F130所包含的各处理、结合控制部F140所包含的各处理以及电池余量检测部F150所包含的各处理也可以由不同的计算机执行。
运行计划生成部F110基于来自服务器装置300的运行指令来生成底盘单元100的运行计划。运行计划是规定了底盘单元100所行驶的路径以及在路径的一部分或全部中底盘单元100应该进行的处理的数据。作为运行计划所包含的数据的例子,例如可以举出以下这样的数据。
(1)通过道路路段的集合来表示底盘单元100所行驶的预定的路径(预定行驶路径)的数据
例如,也可以是,运行计划生成部F110参照存储于辅助存储部103等的地图数据,并且基于来自服务器装置300的指令来生成此处所说的“预定行驶路径”。此外,“预定行驶路径”可以利用外部的服务来生成,或者也可以由服务器装置300提供。
(2)表示底盘单元100在预定行驶路径上的任意的地点应该进行的处理的数据
此处所说的“任意的地点”例如是使底盘单元100与车身单元200分离或结合的场所等。并且,底盘单元100在上述那样的任意的地点应该进行的处理中,例如有“将底盘单元100与车身单元200分离或结合”这样的处理,但并不限于这些。
环境检测部F120基于周边状况检测传感器104获取到的数据来检测底盘单元周边的环境。检测对象例如是车道的数量和位置、存在于底盘单元100的周边的车辆的数量和位置、存在于底盘单元100的周边的障碍物的数量和位置、道路的构造、道路标志等,但不限于这些。检测的对象只要是底盘单元100进行自主的行驶所需的检测的对象即可,可以是任意的检测的对象。此外,环境检测部F120也可以跟踪检测到的物体。例如,也可以根据前一步检测到的物体的坐标与当前的物体的坐标的差来求出该物体的相对速度。
行驶控制部F130基于运行计划生成部F110所生成的运行计划、环境检测部F120所生成的环境数据以及位置信息获取部105获取到的底盘单元100的位置信息来对底盘单元100的行驶进行控制。例如,行驶控制部F130使底盘单元100沿着由运行计划生成部F110生成的预定行驶路径行驶。此时,行驶控制部F130以障碍物不会进入以底盘单元100为中心的规定的安全区域内的方式使底盘单元100行驶。需要说明的是,关于使底盘单元100自主行驶的方法,可以采用公知的方法。此外,行驶控制部F130还具有按照来自服务器装置300的指令对底盘单元100的行驶进行控制的功能。
电池余量检测部F150检测电池107的充电余量(电池余量)。例如,电池余量检测部F150利用装配于电池107的SOC(State of Charge:荷电状态)传感器等来检测电池余量。与由电池余量检测部F150检测到的电池余量相关的信息(电池信息)按规定的周期从通信部304被发送向服务器装置300。此时的电池信息中除了包含与电池余量相关的信息之外,还包含用于识别底盘单元100的信息(底盘ID)。
结合控制部F140控制底盘单元100与车身单元200的结合及分离。在底盘单元100与车身单元200的结合及分离作业通过外部设备来进行的情况下,结合控制部F140通过无线通信等来控制上述外部设备,由此进行底盘单元100与车身单元200的结合及分离作业。在用于进行底盘单元100与车身单元200的结合及分离的设备搭载于底盘单元100的情况下,结合控制部F140控制上述设备,由此进行底盘单元100与车身单元200的结合及分离作业。
(服务器装置的功能构成)
接着,基于图6对服务器装置300的功能构成进行说明。如图6所示,本例中的服务器装置300包括电池余量获取部F310、指令生成部F320以及底盘单元管理数据库D310来作为其功能构成要素。电池余量获取部F310和指令生成部F320通过处理器301执行存储于主存储部302或辅助存储部303的程序来实现。需要说明的是,电池余量获取部F310和指令生成部F320中的任一个或其一部分也可以由硬件电路形成。此外,电池余量获取部F310和指令生成部F320中的任一个或其处理的一部分也可以由连接于网络N1的其他计算机执行。例如,电池余量获取部F310所包含的各处理和指令生成部F320所包含的各处理也可以由不同的计算机执行。
底盘单元管理数据库D310通过由处理器301执行的数据库管理系统(DatabaseManagement System:DBMS)的程序来构建。详细而言,DBMS的程序对存储于辅助存储部303的数据进行管理,由此来构建底盘单元管理数据库D310。底盘单元管理数据库D310例如是关系数据库。
底盘单元管理数据库D310储存与处于服务器装置300的管理下的底盘单元100相关的信息。在底盘单元管理数据库D310中,进行底盘单元100的识别信息和与底盘单元100相关的信息的关联。在此,基于图7对储存于底盘单元管理数据库D310的信息的一个构成例进行说明。图7是举例示出底盘单元管理数据库D310的表格构成的图。需要说明的是,储存于底盘单元管理数据库D310的表(以下,有时也记为“底盘单元信息表”。)的构成并不限定于图7所示的例子,可以适当进行栏的追加、变更或删除。
图7所示的底盘单元信息表具有底盘ID、当前位置、电池余量以及状态各栏。底盘ID栏中登记有用于识别各底盘单元100的信息(底盘ID)。当前位置栏中登记有表示各底盘单元100的当前位置的信息。当前位置栏中登记的信息可以是表示各底盘单元100所处的场所的地址的信息,或者也可以是表示各底盘单元100所处的场所的地图上的坐标(纬度/经度)的信息。电池余量栏中登记有表示搭载于各底盘单元100的电池107的充电余量的信息。在本例中,登记有表示电池107的充电余量相对于满充电量的比率(%)的信息。状态栏中登记有表示各底盘单元100的状态的信息。例如,如果底盘单元100为已与车身单元200结合的状态,则登记为“结合中”。如果底盘单元100为从车身单元200分离并且朝向规定的充电设施移动中,则登记为“回收中”。如果底盘单元100为朝向用于与车身单元200结合的场所(规定的地点)移动中,则登记为“移动中”。如果底盘单元100为在充电设施等待机的状态,则登记为“待机中”。
电池余量获取部F310获取各底盘单元100的电池余量。在本例中,通信部304接收从各底盘单元100向服务器装置300发送的电池信息,由此获取电池余量。需要说明的是,电池信息包括表示各底盘单元100中的电池107的充电余量(电池余量)的信息和各底盘单元100的底盘ID。当如此获取到电池余量时,电池余量获取部F310基于底盘ID来访问底盘单元管理数据库D310。然后,电池余量获取部F310更新与底盘ID对应的底盘单元信息表中的电池余量栏的登记信息。此时,如果底盘单元信息表的状态栏中被登记为“结合中”,则电池余量获取部F310判别获取到的电池余量是否小于规定的阈值。此处所说的“规定的阈值”是用于判定为需要对电池107进行充电的阈值。本例中的规定的阈值例如被设定为若电池余量低于该规定的阈值则预测为底盘单元100难以移动至最近的充电设施的值。然后,如果电池余量小于规定的阈值,则与电池余量相关的信息和底盘ID从电池余量获取部F310被交付给指令生成部F320。
指令生成部F320生成用于将电池余量已下降至小于规定的阈值的底盘单元100(第一底盘单元100A)更换为电池107的充电已完成的底盘单元100(第二底盘单元100B)的指令。此时的指令中包括:用于使第一底盘单元100A从车身单元200分离的指令(分离指令)以及用于使第二底盘单元100B与车身单元200结合的指令(结合指令)。
分离指令是用于在规定的地点使第一底盘单元100A从车身单元200分离的指令。这样的分离指令中例如包括以下的第一至第二指令。
(第一指令)用于使第一底盘单元100A在规定的地点从车身单元200分离的指令
(第二指令)用于使第一底盘单元100A从规定的地点行驶至规定的充电设施的指令
规定的地点是第一底盘单元100A停车的场所,是第一底盘单元100A的当前位置。需要说明的是,在第一底盘单元100A处于行驶中的情况下,规定的地点被设定为距离第一底盘单元100A的当前位置最近的停车场。在该情况下,也可以是,分离指令中除了包括上述第一指令和第二指令之外,还包括用于使第一底盘单元100A从当前位置行驶至规定的地点的指令(移动指令)。此外,规定的充电设施是距离规定的地点最近的充电设施。
结合指令是用于在规定的地点使第二底盘单元100B与车身单元200结合的指令。这样的结合指令例如包括以下的第三至第四指令。
(第三指令)用于使第二底盘单元100B行驶至规定的地点的指令
(第四指令)用于使第二底盘单元100B在规定的地点与车身单元200结合的指令
由指令生成部F320生成的分离指令经由通信部304被发送向第一底盘单元100A。此外,由指令生成部F320生成的结合指令经由通信部304被发送向第二底盘单元100B。需要说明的是,作为上述结合指令的发送目的地的第二底盘单元100B基于储存于底盘单元管理数据库D310的信息来确定。例如,指令生成部F320首先提取在底盘单元信息表的状态栏中被登记为“待机中”并且在电池余量栏中被登记为“100%”的底盘单元100。接着,指令生成部F320将提取出的底盘单元100中的被登记于底盘单元信息表的当前位置栏的当前位置距离规定的地点最近的底盘单元100选定为第二底盘单元100B。选定作为上述结合指令的发送目的地的第二底盘单元100B的方法并不限定于上述的方法。例如,基于道路交通信息等推定出的预定到达时间(到达规定的地点的预定时间)最早的底盘单元100也可以被选定为第二底盘单元100B。
(处理的流程)
接着,基于图8对本实施例中的由服务器装置300进行的处理的流程进行说明。图8是表示在接收到从第一底盘单元100A发送的电池107信息时,在服务器装置300进行的处理的流程的流程图。
在图8中,当服务器装置300的通信部304接收到从第一底盘单元100A发送的电池信息时,电池余量获取部F310获取电池信息所包含的电池余量(步骤S101)。在该情况下,电池余量获取部F310基于电池信息所包含的底盘ID来访问底盘单元管理数据库D310。即,电池余量获取部F310访问与第一底盘单元100A对应的底盘单元信息表。然后,电池余量获取部F310用上述电池余量来更新上述底盘单元信息表中的电池余量栏的登记信息。
电池余量获取部F310判别上述底盘单元信息表的状态栏中是否被登记为“结合中”(步骤S102)。即,电池余量获取部F310判别第一底盘单元100A是否处于与车身单元200结合中。此时,如果上述底盘单元信息表中的状态栏中被登记为“移动中”、“回收中”或“待机中”(在步骤S102中为否定判定),则结束图8的处理流程。另一方面,如果上述底盘单元信息表的状态栏中被登记为“结合中”(在步骤S102中为肯定判定),则电池余量获取部F310判别上述电池余量是否小于规定的阈值(步骤S103)。此时,如果在步骤S101中获取到的电池余量为规定的阈值以上(在步骤S103中为否定判定),则结束图8的处理流程。另一方面,如果在步骤S101中获取到的电池余量小于规定的阈值(在步骤S103中为肯定判定),则第一底盘单元100A的电池余量和底盘ID从电池余量获取部F310被交付给指令生成部F320。
指令生成部F320确定用于使第一底盘单元100A从车身单元200分离的场所(规定的地点)(步骤S104)。例如,将第一底盘单元100A停车的场所确定为规定的地点。需要说明的是,如果第一底盘单元100A处于行驶中,则指令生成部F320也可以将距离第一底盘单元100A的当前位置最近的停车场确定为规定的地点。
指令生成部F320选定第二底盘单元100B(步骤S105)。例如,指令生成部F320首先通过访问底盘单元管理数据库D310来提取状态栏中被登记为“待机中”并且电池余量栏中被登记为“100%”的底盘单元信息表。接着,指令生成部F320从提取出的底盘单元信息表之中确定被登记于当前位置栏的当前位置距离在上述步骤S104中确定出的规定的地点最近的底盘单元信息表。与如此确定出的底盘单元信息表对应的底盘单元100被选定为第二底盘单元100B。
指令生成部F320生成分离指令和结合指令(步骤S106)。分离指令包括上述的第一指令和第二指令。需要说明的是,如果第一底盘单元100A处于行驶中,则分离指令中除了包括第一指令和第二指令之外,还包括上述的移动指令。结合指令包括上述的第三指令和第四指令。
在步骤S106中生成的分离指令经由通信部304被发送向第一底盘单元100A(步骤S107)。在接收到上述分离指令的第一底盘单元100A中,运行计划生成部F110生成基于分离指令的运行计划。如上所述,运行计划包括通过道路路段的集合来表示第一底盘单元100A的预定行驶路径的数据以及表示第一底盘单元100A在预定行驶路径上的任意的地点应该进行的处理的数据。本例中的运行计划包括表示从规定的地点起到规定的充电设施为止的预定行驶路径的数据以及表示第一底盘单元100A在规定的地点应该进行的处理的数据。需要说明的是,第一底盘单元100A处于行驶中的情况下的运行计划包括表示从当前位置起经过规定的地点而到达规定的充电设施的预定行驶路径的数据以及表示第一底盘单元100A在规定的地点应该进行的处理的数据。第一底盘单元100A在规定的地点应该进行的处理是使第一底盘单元100A从车身单元200分离的处理。当生成这样的运行计划时,在规定的地点,第一底盘单元100A的结合控制部F140通过对外部设备或搭载于底盘单元100的设备进行控制来使该第一底盘单元100A与车身单元200分离。当规定的地点处的第一底盘单元100A与车身单元200的分离作业完成时,行驶控制部F130开始第一底盘单元100A的行驶。此时,行驶控制部F130基于上述行驶预定路径、环境检测部F120所生成的环境数据以及位置信息获取部105获取到的位置信息来控制驱动部106,由此对第一底盘单元100A的行驶进行控制。由此,第一底盘单元100A能从规定的地点起以自动驾驶的方式自主行驶到规定的充电设施。
在步骤S106中生成的结合指令经由通信部304被发送向第二底盘单元100B(步骤S108)。在接收到上述结合指令的第二底盘单元100B中,运行计划生成部F110生成基于结合指令的运行计划。该情况下的运行计划包括表示从第二底盘单元100B的待机场所起到规定的地点为止的预定行驶路径的数据以及表示第二底盘单元100B在规定的地点应该进行的处理的数据。第二底盘单元100B在规定的地点应该进行的处理是使第二底盘单元100B与已从第一底盘单元100A分离的车身单元200结合的处理。当生成这样的运行计划时,第二底盘单元100B的行驶控制部F130开始第二底盘单元100B的行驶。此时,行驶控制部F130基于上述预定行驶路径、环境检测部F120所生成的环境数据以及位置信息获取部105获取到的位置信息来控制驱动部106,由此对第二底盘单元100B的行驶进行控制。由此,第二底盘单元100B能从待机场所以自动驾驶的方式自主行驶到规定的地点。当第二底盘单元100B到达规定的地点时,第二底盘单元100B的结合控制部F140使第二底盘单元100B与车身单元200结合。
根据图8所示的处理流程,当与车身单元结合的底盘单元的电池余量小于规定的阈值时,能将与车身单元结合的底盘单元自动地更换为搭载有充电完成的电池的底盘单元。由此,分离型车辆的用户能节省对底盘单元的电池进行充电的工夫。此外,也能削减用于在用户的自己家等设置充电设施的成本。由此,能提高利用分离型车辆的用户的便利性。
<其他>
上述的实施方式只不过是一个例子,本公开可以在不脱离其主旨的范围内适当变更来实施。
此外,对于在本公开中已说明的处理或单元,只要不产生技术上的矛盾,就能自由地组合来实施。此外,作为由一个装置进行的处理被进行了说明的处理也可以由多个装置分担地执行。另一方面,作为由多个装置进行的处理被进行了说明的处理也可以由一个装置执行。在计算机系统中,能灵活地变更通过何种硬件构成来实现各功能。
此外,本公开也可以通过如下方式实现:将安装有在上述的实施方式中已说明的功能的计算机程序(信息处理程序)提供给计算机,该计算机具有的一个以上的处理器读出程序并执行。这样的计算机程序可以通过能连接于计算机的系统总线的非暂时性计算机可读存储介质来提供给计算机,或者也可以经由网络提供给计算机。非暂时性计算机可读存储介质是能利用电、磁、光学、机械或化学作用来储存数据和程序等信息,并且能从计算机等读取的记录介质。这样的记录介质例如是磁盘(软盘(注册商标)、硬盘驱动器(HDD)等)、光盘(CD-ROM、DVD盘/蓝光光盘等)等任意类型的盘。此外,上述记录介质也可以是读入专用存储器(ROM)、随机存取存储器(RAM)、EPROM、EEPROM、磁卡、闪存、光卡或SSD(SolidState Drive:固态驱动器)等介质。
- 信息处理装置、信息处理方法、信息处理系统和存储程序的非暂时性存储介质
- 信息处理装置、信息处理方法、信息处理系统和存储程序的非暂时性存储介质