一种芯片检测装置
文献发布时间:2023-06-19 12:05:39
技术领域
本发明涉及芯片检测技术领域,尤其涉及一种芯片检测装置。
背景技术
目前,芯片为半导体元件产品的总称,又称集成电路,或称微电路、微芯片、晶片/芯片在电子学中是一种把电路(主要包括半导体设备,也包括被动组件等)小型化的方式,并时常制造在半导体晶圆表面上。仅仅在其开发后半个世纪,集成电路变得无处不在,计算机、手机和其他数字电器成为社会结构不可缺少的一部分。这是因为,现代计算、交流、制造和交通系统,包括互联网,全都依赖于集成电路的存在。甚至很多学者认为有集成电路带来的数字革命是人类历史中最重要的事件。IC的成熟将会带来科技的大跃进,不论是在设计的技术上,或是半导体的工艺突破,两者都是息息相关,因此对于芯片的加工制造要求日益提高,但芯片的工艺生产步骤尤为繁多,其中一个重要的工艺步骤便是镜检,以排除一些芯片中的不良品,但是通常都会由镜检工作人员通过高倍显微镜进行检查,长时间的工作不仅会使得镜检人员肉眼疲劳,工作强度和伤害也比较大,同时忙中容易出错。
现有的芯片检测装置中,虽加入了调节系统,减少了人力,但对芯片图像进行采集时,往往需要检查人员进行手动调焦,调焦效率低下,检测时间长。
发明内容
为此,本发明提供一种芯片检测装置,用以克服现有技术中对芯片图像进行采集时需要检查人员进行手动调焦导致调焦效率低下检测时间长的问题。
为实现上述目的,本发明提供一种芯片检测装置,包括,
旋转盘,其沿水平方向设置,所述旋转盘下方设有固定台,所述固定台上连接有步进电机,所述步进电机与所述旋转盘相连并能够带动旋转盘转动;
滤光器,其设置在所述旋转盘上表面,所述滤光器沿所述旋转盘外边缘圆周方向环形均布设置;各所述滤光器正下方所对位置的旋转盘上设有通孔;
所述滤光器设置数量为六个,分别为第一滤光器,第二滤光器,第三滤光器,第四滤光器,第五滤光器,第六滤光器;
支撑架,其设置在所述旋转盘一侧,所述支撑架上设有第一支撑板和第二支撑板,所述第一支撑板上设有光源装置,所述第二支撑板上设有图像采集装置;
中控模块其与所述步进电机、所述光源装置、所述图像采集装置分别相连,用以调节各部件工作状态;
所述滤光器包括:下壳体、上壳体、滤光镜、锁紧环、二向色镜,其中,所述二向色镜设置于所述下壳体和所述上壳体之间;所述下壳体在水平方向设有光线射入口,在竖直方向设有光线射出口;所述上壳体在竖直方向设有反射光线射出口;所述光线射入口和所述反射光线射出口上分别设有滤光镜,各所述滤光镜的一侧设有用以压紧滤光镜的锁紧环;
所述光源装置包括:散热片、焦距调节筒、发光源、透镜、遮光筒、旋转电机,所述散热片设置在所述光源装置一端并与所述发光源相连;所述透镜设置在所述光源装置设置在相对于所述散热片的另一端,用以对所述发光源发出的光进行收拢,所述遮光筒设置在所述透镜的一侧,所述遮光筒上设有通孔;所述焦距调节筒设置在所述发光源和所述透镜之间,所述旋转电机与所述焦距调节筒相连,能够智能调节光源装置焦距;
所述图像采集装置包括摄像头、镜头、调焦筒、调焦筒电机;
当采用所述芯片检测装置进行芯片检测时,将待检测芯片放置于所述旋转盘的通孔下方,所述中控模块控制所述步进电机转动,步进电机带动所述旋转盘,使所述第一滤光器位于所述图像采集装置下方,调节完成后,所述光源装置启动,所述中控模块对所述焦距调节筒和所述调焦筒进行调节,使所述图像采集装置能够采集到清晰的图像;
所述焦距调节筒的初始位置为缩进状态,所述中控模块控制焦距调节筒进行两次外放,所述图像采集装置拍摄初始位置、第一次外放和第二次外放时的芯片图像,并将图像传递至所述中控模块,中控模块根据图像的清晰度确定所述焦距调节筒的最佳观测焦距的距离范围并计算外放理论距离;
所述中控模块控制焦距调节筒移动至外放理论距离,之后进行前后小距离移动,所述图像采集装置拍摄外放理论距离处、向前小距离移动处、向后小距离移动处的图像,并将图像传递至所述中控模块,中控模块根据图像的清晰度对所述焦距调节筒的最佳观测焦距的距离进行二次调节,确定芯片最佳观测距离。
进一步地,所述焦距调节筒的初始位置为缩进状态,所述中控模块控制所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片第一图像A1,所述图像采集装置将获取的芯片第一图像A1传递至中控模块;
所述中控模块控制所述旋转电机旋转以带动所述焦距调节筒外放,外放焦距调节筒距离为L1,所述中控模块控制所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片第二图像A2,所述图像采集装置将获取的芯片第二图像A2传递至中控模块;
所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒外放,外放总距离为L2,所述中控模块控制所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片第三图像A3,所述图像采集装置将获取的芯片第三图像A3传递至中控模块;
所述中控模块对所述芯片第一图像A1进行分析,获取芯片第一图像的清晰度B1,中控模块对所述芯片第二图像A2进行分析,获取芯片第二图像的清晰度B2,中控模块对所述芯片第三图像A3进行分析,获取芯片第三图像的清晰度B3;
所述中控模块将第二图像的清晰度B2与第三图像的清晰度B3进行对比:
当B2≥B3时,所述中控模块判定芯片最佳观测焦距的距离在L2内;
当B2<B3时,所述中控模块无法判定芯片最佳观测焦距的距离范围。
进一步地,当所述中控模块判定芯片最佳观测焦距的距离在L2内时,中控模块根据第一图像的清晰度B1、芯片第二图像的清晰度B2、外放焦距调节筒距离L1,计算焦距调节筒第一预设外放理论距离Lz1,Lz1=L1+(B2-B1)×b×L1,其中,b为清晰度对焦距调节筒外放距离调节参数;
所述中控模块将第一预设外放理论距离Lz1与L2进行对比:
当Lz1>L2时,所述中控模块判定芯片最佳观测焦距的距离在L1内;
当Lz1≤L2时,所述中控模块无法判定芯片最佳观测焦距的距离是否在L1内。
进一步地,当Lz1≤L2时,所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒回缩,直至外放总距离为Lz1,所述中控模块控制所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片图像Az1,所述图像采集装置将获取的芯片图像Az1传递至中控模块,中控模块对所述芯片图像Az1进行分析,获取清晰度Bz1,中控模块将清晰度Bz1与清晰度B2进行对比,当Bz1≥B2时,所述中控模块判定芯片最佳观测焦距的距离在L1~L2范围内;
当Bz1<B2时,所述中控模块无法判定芯片最佳观测焦距的距离是否在L1~L2范围内。
进一步地,当Bz1<B2时,所述中控模块计算最佳观测距离评价值S,
S=∣(B2-Bz1)÷(Lz1-L1)×s-(B2-B3)÷(L2-L1)×s∣
其中,s为最佳观测距离评价值S的计算调节参数;所述中控模块内设有最佳观测距离评价预设值Sz,所述中控模块将最佳观测距离评价值S与最佳观测距离评价预设值Sz进行对比:
当S≤Sz时,所述中控模块判定芯片最佳观测焦距的距离在L1内;
当S>Sz时,所述中控模块判定芯片最佳观测焦距的距离L1~L2范围内。
进一步地,当所述中控模块判定芯片最佳观测焦距的距离在L1内时,所述中控模块计算第二预设外放理论距离Lz2,Lz2=L1-(B2-Bz1)÷(Lz1-L1)×l2,其中,l2为第二预设外放理论距离Lz2的补偿参数;
所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒回缩,直至外放总距离为Lz2,所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片图像Az2;所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒回缩,直至外放总距离Lz2-Lx,所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片图像Ax1;所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒外放,直至外放总距离Lz2+Lx,所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片图像Ax2;
所述中控模块对所述芯片图像Az2进行分析,获取清晰度Bz2,所述中控模块对所述芯片图像Ax1进行分析,获取清晰度Bx1,中控模块对所述芯片图像Ax2进行分析,获取清晰度Bx2,
所述中控模块清晰度Bx1、清晰度Bx2进行对比:
当Bx1>Bx2时,所述中控模块判定最佳观测焦距的距离在Lz2-Lx~Lz2内,中控模块计算最佳观测距离Lm,Lm=Lz2-(Bz2-Bx2)×d1,其中,d1为最佳观测距离补偿参数;
当Bx2>Bx1时,所述中控模块判定最佳观测焦距的距离在Lz2~Lz2+Lx内,中控模块计算最佳观测距离Lm,Lm=Lz2+(Bz2-Bx1)×d1;
所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒移动,直至外放总距离为Lm,并以Lm作为芯片最佳观测距离。
进一步地,当B2<B3,所述中控模块无法判定芯片最佳观测焦距的距离范围时,所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒收缩,直至外放总距离为L3,L3=L1+(L2-L1)/2,所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片第四图像A4,所述图像采集装置将获取的芯片第四图像A4传递至中控模块,中控模块对第四图像A4进行分析,获取清晰度B4,所述中控模块计算最佳观测距离评价值Sc,Sc=∣(B3-B2)÷(L2-L1)×s-(B3-B4)÷(L2-L3)×s∣,其中,s为最佳观测距离评价值S的计算调节参数;所述中控模块内设有最佳观测距离评价预设值Sz,所述中控模块将最佳观测距离评价值Sc与最佳观测距离评价预设值Sz进行对比:
当Sc≤Sz时,所述中控模块判定芯片最佳观测焦距的距离在L2外;
当Sc>Sz时,所述中控模块判定芯片最佳观测焦距的距离L1~L2范围内。
进一步地,当所述中控模块判定芯片最佳观测焦距的距离L1~L2范围内时,中控模块计算第三预设外放理论距离Lz3,Lz3=L2-(B3-B4)÷(L2-L3)×l3,其中,l3为第三预设外放理论距离Lz3的补偿参数;
所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒移动,直至外放总距离为Lz3,所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片图像Az3;
所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒回缩,直至外放总距离Lz3-Lx,所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片图像Ax3;所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒外放,直至外放总距离Lz3+Lx,所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片图像Ax4;
所述中控模块对所述芯片图像Az3进行分析,获取清晰度Bz3,所述中控模块对所述芯片图像Ax3进行分析,获取清晰度Bx3,中控模块对所述芯片图像Ax4进行分析,获取清晰度Bx4,
所述中控模块清晰度Bx3、清晰度Bx4进行对比:
当Bx3>Bx4时,所述中控模块判定最佳观测焦距的距离在Lz3-Lx~Lz3内,中控模块计算最佳观测距离Lm,Lm=Lz3-(Bz3-Bx3)×d1,其中,d1为最佳观测距离补偿参数;
当Bx3>Bx4时,所述中控模块判定最佳观测焦距的距离在Lz3~Lz3+Lx内,中控模块计算最佳观测距离Lm,Lm=Lz3+(Bz3-Bx4)×d1;
所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒移动,直至外放总距离为Lm,并以Lm作为芯片最佳观测距离。
进一步地,当所述中控模块判定芯片最佳观测焦距的距离在L2外时,所述中控模块计算第四预设外放理论距离Lz4,Lz4=L2+(B3-B4)÷(L2-L3)×l4,其中,l4为第四预设外放理论距离Lz4的补偿参数;
所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒外放,直至外放总距离为Lz4,所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片图像Az4;
所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒回缩,直至外放总距离Lz4-Lx,所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片图像Ax5;所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒外放,直至外放总距离Lz4+Lx,所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片图像Ax6;
所述中控模块对所述芯片图像Az4进行分析,获取清晰度Bz4,所述中控模块对所述芯片图像Ax5进行分析,获取清晰度Bx5,中控模块对所述芯片图像Ax6进行分析,获取清晰度Bx6,
所述中控模块清晰度Bx5、清晰度Bx6进行对比:
当Bx5>Bx6时,所述中控模块判定最佳观测焦距的距离在Lz4-Lx~Lz4内,中控模块计算最佳观测距离Lm,Lm=Lz4-(Bz4-Bx5)×d1,其中,d1为最佳观测距离补偿参数;
当Bx5>Bx6时,所述中控模块判定最佳观测焦距的距离在Lz4~Lz4+Lx内,中控模块计算最佳观测距离Lm,Lm=Lz4+(Bz4-Bx6)×d1;
所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒移动,直至外放总距离为Lm,并以Lm作为芯片最佳观测距离。
与现有技术相比,本发明的有益效果在于,当采用所述芯片检测装置进行芯片检测时,将待检测芯片放置于所述旋转盘的通孔下方,所述中控模块控制所述步进电机转动,步进电机带动所述旋转盘,使所述第一滤光器位于所述图像采集装置下方,调节完成后,所述光源装置启动,所述中控模块对所述焦距调节筒和所述调焦筒进行调节,使所述图像采集装置能够采集到清晰的图像;自动调节焦距,提高调焦效率,进而提高芯片检测速度。
进一步地,所述焦距调节筒的初始位置为缩进状态,所述中控模块控制焦距调节筒进行两次外放,所述图像采集装置拍摄初始位置、第一次外放和第二次外放时的芯片图像,并将图像传递至所述中控模块,中控模块根据图像的清晰度确定所述焦距调节筒的最佳观测焦距的距离范围并计算外放理论距离;通过图像清晰度,对焦距进行调节,进一步提高调焦效率,进而提高芯片检测速度。
进一步地,所述中控模块控制焦距调节筒移动至外放理论距离,之后进行前后小距离移动,所述图像采集装置拍摄外放理论距离处、向前小距离移动处、向后小距离移动处的图像,并将图像传递至所述中控模块,中控模块根据图像的清晰度对所述焦距调节筒的最佳观测焦距的距离进行二次调节,确定芯片最佳观测距离。在确定最佳观测位置的范围后,通过左右进行小范围移动,更精确的确定芯片观测距离,从而做到自动调焦对其,使观测到的芯片图像更加清晰。
附图说明
图1为本发明所述芯片检测装置的结构示意图;
图2为本发明所述滤光器爆炸图;
图3为本发明所述光源装置剖面示意图;
图4为本发明所述图像采集装置剖面示意图。
具体实施方式
为了使本发明的目的和优点更加清楚明白,下面结合实施例对本发明作进一步描述;应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
下面参照附图来描述本发明的优选实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非在限制本发明的保护范围。
需要说明的是,在本发明的描述中,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
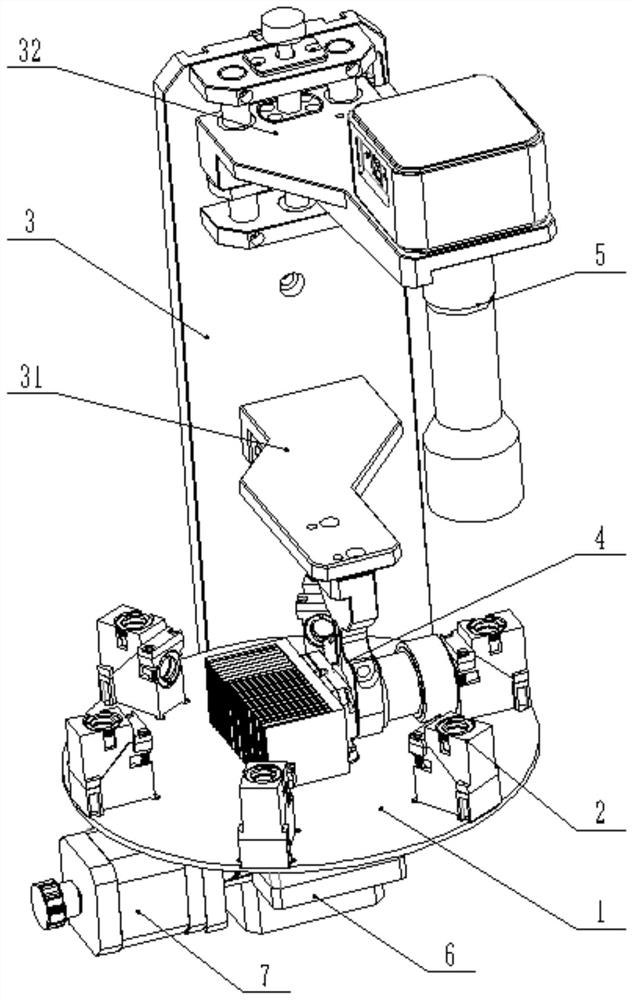
请参阅图1所示,为本发明所述芯片检测装置的结构示意图,本发明公布一种芯片检测装置,包括,
旋转盘1,其沿水平方向设置,所述旋转盘下方设有固定台6,所述固定台6上连接有步进电机7,所述步进电机7与所述旋转盘1相连并能够带动旋转盘1转动。
滤光器2,其设置在所述旋转盘1上表面,所述滤光器2沿所述旋转盘1外边缘圆周方向环形均布设置;各所述滤光器正下方所对位置的旋转盘1上设有通孔。
所述滤光器设置数量为六个,分别为第一滤光器,第二滤光器,第三滤光器,第四滤光器,第五滤光器,第六滤光器。
支撑架3,其设置在所述旋转盘一侧,所述支撑架上设有第一支撑板31和第二支撑板32,所述第一支撑板31上设有光源装置4,所述第二支撑板32上设有图像采集装置5。
请继续参阅图2所示,其为本发明所述滤光器爆炸图,所述滤光器2包括:下壳体21、上壳体22、滤光镜23、锁紧环24、二向色镜25,其中,所述二向色镜25设置于所述下壳体21和所述上壳体23之间;所述下壳体21在水平方向设有光线射入口,在竖直方向设有光线射出口;所述上壳体22在竖直方向设有反射光线射出口;所述光线射入口和所述反射光线射出口上分别设有滤光镜23,各所述滤光镜23的一侧设有用以压紧滤光镜的锁紧环24。
请继续参阅图3所示,其为本发明所述光源装置剖面示意图,所述光源装置4包括:散热片41、焦距调节筒42、发光源43、透镜44、遮光筒45、旋转电机46,所述散热片41设置在所述光源装置4一端并与所述发光源43相连;所述透镜44设置在所述光源装置4设置在相对于所述散热片41的另一端,用以对所述发光源43发出的光进行收拢,所述遮光筒45设置在所述透镜44的一侧,所述遮光筒45上设有通孔;所述焦距调节筒42设置在所述发光源43和所述透镜44之间,所述旋转电机46与所述焦距调节筒42相连,能够智能调节光源装置焦距。
请继续参阅图4所示,其为本发明所述图像采集装置剖面示意图,所述图像采集装置5包括摄像头51、镜头52、调焦筒53、调焦筒电机54。
所述芯片检测装置还包括中控模块(图中未画出)其与所述步进电机、所述光源装置、所述图像采集装置分别相连,用以调节各部件工作状态。
当采用所述芯片检测装置进行芯片检测时,将待检测芯片放置于所述旋转盘的通孔下方,所述中控模块控制所述步进电机转动,步进电机带动所述旋转盘,使所述第一滤光器位于所述图像采集装置下方,调节完成后,所述光源装置启动,所述中控模块对所述焦距调节筒和所述调焦筒进行调节,使所述图像采集装置能够采集到清晰的图像。
具体而言,所述焦距调节筒的初始位置为缩进状态,所述中控模块控制所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片第一图像A1,所述图像采集装置将获取的芯片第一图像A1传递至中控模块;
所述中控模块控制所述旋转电机旋转以带动所述焦距调节筒外放,外放焦距调节筒距离为L1,所述中控模块控制所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片第二图像A2,所述图像采集装置将获取的芯片第二图像A2传递至中控模块;
所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒外放,外放总距离为L2,所述中控模块控制所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片第三图像A3,所述图像采集装置将获取的芯片第三图像A3传递至中控模块;
所述中控模块对所述芯片第一图像A1进行分析,获取芯片第一图像的清晰度B1,中控模块对所述芯片第二图像A2进行分析,获取芯片第二图像的清晰度B2,中控模块对所述芯片第三图像A3进行分析,获取芯片第三图像的清晰度B3;
所述中控模块将第二图像的清晰度B2与第三图像的清晰度B3进行对比:
当B2≥B3时,所述中控模块判定芯片最佳观测焦距的距离在L2内;
当B2<B3时,所述中控模块无法判定芯片最佳观测焦距的距离范围。
具体而言,当所述中控模块判定芯片最佳观测焦距的距离在L2内时,中控模块根据第一图像的清晰度B1、芯片第二图像的清晰度B2、外放焦距调节筒距离L1,计算焦距调节筒第一预设外放理论距离Lz1,Lz1=L1+(B2-B1)×b×L1,其中,b为清晰度对焦距调节筒外放距离调节参数。
具体而言,所述中控模块将第一预设外放理论距离Lz1与L2进行对比:
当Lz1>L2时,所述中控模块判定芯片最佳观测焦距的距离在L1内;
当Lz1≤L2时,所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒回缩,直至外放总距离为Lz1,所述中控模块控制所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片图像Az1,所述图像采集装置将获取的芯片图像Az1传递至中控模块,中控模块对所述芯片图像Az1进行分析,获取清晰度Bz1,中控模块将清晰度Bz1与清晰度B2进行对比,
当Bz1≥B2时,所述中控模块判定芯片最佳观测焦距的距离在L1~L2范围内;
当Bz1<B2时,所述中控模块计算最佳观测距离评价值S,
S=∣(B2-Bz1)÷(Lz1-L1)×s-(B2-B3)÷(L2-L1)×s∣
其中,s为最佳观测距离评价值S的计算调节参数;所述中控模块内设有最佳观测距离评价预设值Sz,所述中控模块将最佳观测距离评价值S与最佳观测距离评价预设值Sz进行对比:
当S≤Sz时,所述中控模块判定芯片最佳观测焦距的距离在L1内;
当S>Sz时,所述中控模块判定芯片最佳观测焦距的距离L1~L2范围内。
当所述中控模块判定芯片最佳观测焦距的距离在L1内时,所述中控模块计算第二预设外放理论距离Lz2,Lz2=L1-(B2-Bz1)÷(Lz1-L1)×l2,其中,l2为第二预设外放理论距离Lz2的补偿参数。
所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒回缩,直至外放总距离为Lz2,所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片图像Az2;所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒回缩,直至外放总距离Lz2-Lx,所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片图像Ax1;所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒外放,直至外放总距离Lz2+Lx,所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片图像Ax2。
所述中控模块对所述芯片图像Az2进行分析,获取清晰度Bz2,所述中控模块对所述芯片图像Ax1进行分析,获取清晰度Bx1,中控模块对所述芯片图像Ax2进行分析,获取清晰度Bx2,
所述中控模块清晰度Bx1、清晰度Bx2进行对比:
当Bx1>Bx2时,所述中控模块判定最佳观测焦距的距离在Lz2-Lx~Lz2内,中控模块计算最佳观测距离Lm,Lm=Lz2-(Bz2-Bx2)×d1,其中,d1为最佳观测距离补偿参数;
当Bx2>Bx1时,所述中控模块判定最佳观测焦距的距离在Lz2~Lz2+Lx内,中控模块计算最佳观测距离Lm,Lm=Lz2+(Bz2-Bx1)×d1;
所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒移动,直至外放总距离为Lm,并以Lm作为芯片最佳观测距离。
在确定最佳观测位置的范围后,通过左右进行小范围移动,更精确的确定芯片观测距离,从而做到自动调焦对其,使观测到的芯片图像更加清晰。
具体而言,当B2<B3,所述中控模块无法判定芯片最佳观测焦距的距离范围时,所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒收缩,直至外放总距离为L3,L3=L1+(L2-L1)/2,所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片第四图像A4,所述图像采集装置将获取的芯片第四图像A4传递至中控模块,中控模块对第四图像A4进行分析,获取清晰度B4,所述中控模块计算最佳观测距离评价值Sc,Sc=∣(B3-B2)÷(L2-L1)×s-(B3-B4)÷(L2-L3)×s∣,其中,s为最佳观测距离评价值S的计算调节参数;所述中控模块内设有最佳观测距离评价预设值Sz,所述中控模块将最佳观测距离评价值Sc与最佳观测距离评价预设值Sz进行对比:
当Sc≤Sz时,所述中控模块判定芯片最佳观测焦距的距离在L2外;
当Sc>Sz时,所述中控模块判定芯片最佳观测焦距的距离L1~L2范围内。
具体而言,当所述中控模块判定芯片最佳观测焦距的距离L1~L2范围内时,中控模块计算第三预设外放理论距离Lz3,Lz3=L2-(B3-B4)÷(L2-L3)×l3,其中,l3为第三预设外放理论距离Lz3的补偿参数;
所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒移动,直至外放总距离为Lz3,所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片图像Az3;
所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒回缩,直至外放总距离Lz3-Lx,所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片图像Ax3;所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒外放,直至外放总距离Lz3+Lx,所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片图像Ax4;
所述中控模块对所述芯片图像Az3进行分析,获取清晰度Bz3,所述中控模块对所述芯片图像Ax3进行分析,获取清晰度Bx3,中控模块对所述芯片图像Ax4进行分析,获取清晰度Bx4,
所述中控模块清晰度Bx3、清晰度Bx4进行对比:
当Bx3>Bx4时,所述中控模块判定最佳观测焦距的距离在Lz3-Lx~Lz3内,中控模块计算最佳观测距离Lm,Lm=Lz3-(Bz3-Bx3)×d1,其中,d1为最佳观测距离补偿参数;
当Bx3>Bx4时,所述中控模块判定最佳观测焦距的距离在Lz3~Lz3+Lx内,中控模块计算最佳观测距离Lm,Lm=Lz3+(Bz3-Bx4)×d1;
所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒移动,直至外放总距离为Lm,并以Lm作为芯片最佳观测距离。
具体而言,当所述中控模块判定芯片最佳观测焦距的距离在L2外时,所述中控模块计算第四预设外放理论距离Lz4,Lz4=L2+(B3-B4)÷(L2-L3)×l4,其中,l4为第四预设外放理论距离Lz4的补偿参数。
所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒外放,直至外放总距离为Lz4,所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片图像Az4。
所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒回缩,直至外放总距离Lz4-Lx,所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片图像Ax5;所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒外放,直至外放总距离Lz4+Lx,所述图像采集装置对此时的所述上壳体的滤光镜图像进行拍照,以获取芯片图像Ax6;
所述中控模块对所述芯片图像Az4进行分析,获取清晰度Bz4,所述中控模块对所述芯片图像Ax5进行分析,获取清晰度Bx5,中控模块对所述芯片图像Ax6进行分析,获取清晰度Bx6,
具体而言,所述中控模块清晰度Bx5、清晰度Bx6进行对比:
当Bx5>Bx6时,所述中控模块判定最佳观测焦距的距离在Lz4-Lx~Lz4内,中控模块计算最佳观测距离Lm,Lm=Lz4-(Bz4-Bx5)×d1,其中,d1为最佳观测距离补偿参数;
当Bx5>Bx6时,所述中控模块判定最佳观测焦距的距离在Lz4~Lz4+Lx内,中控模块计算最佳观测距离Lm,Lm=Lz4+(Bz4-Bx6)×d1;
所述中控模块控制所述旋转电机旋转继续带动所述焦距调节筒移动,直至外放总距离为Lm,并以Lm作为芯片最佳观测距离
至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征做出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
- 芯片托盘堆叠检测装置的成像系统和芯片托盘堆叠检测装置
- 一种生物芯片的制备方法、生物芯片及检测装置