一种起重机防电缆触碰系统及方法
文献发布时间:2023-06-19 12:14:58
技术领域
本发明属于工程安全控制技术领域,尤其涉及一种起重机防电缆触碰系统及方法。
背景技术
流动式起重机是对轮式起重机和履带式起重机等可移动起重机的统称,俗称为吊车,常被用于工程建设施工中的起重作业。流动式起重机配置有起吊机构臂杆,臂杆顶部通过定滑轮和钢丝绳悬挂有吊钩。起重机操作员施工作业时,将通过一系列的传动装置驱动臂杆在空间内移动,从而操纵吊钩吊取重物。然而由于起重机操作员的疏忽,违规在高压输电线缆附近进行吊装作业,误操作使钢制臂杆触碰到高压线后导致重大人身伤亡事故的案例屡见不鲜。
发明内容
为了解决现有技术存在的问题,本发明提供一种起重机防电缆触碰系统,能够防止起重机触碰电缆。
本发明所要解决的技术问题是通过以下技术方案实现的:
第一方面,提供了一种起重机防电缆触碰系统,包括:
空间测量装置,用于测量吊臂和电缆之间的位置关系;
电缆防触碰预警装置,用于实时显示吊臂和电缆之间的位置关系;
制动控制装置,用于根据吊臂和电缆之间的位置关系对吊臂进行制动控制;
通信装置,用于实现空间测量装置和电缆防触碰预警装置以及制动控制装置之间的通信。
结合第一方面,进一步的,所述空间测量装置包括吊臂姿态测量装置和电缆方位测量装置;吊臂姿态测量装置和电缆方位测量装置均设置在吊臂上。
结合第一方面,进一步的,所述吊臂姿态测量装置包括姿态角度传感器和伸缩长度传感器;所述姿态角度传感器设置于吊臂的末端,伸缩长度传感器设置在吊臂上,平行于吊臂设置。
结合第一方面,进一步的,所述电缆方位测量装置为毫米波雷达传感器,设置在吊臂的顶端。
结合第一方面,进一步的,所述伸缩长度传感器采用拉线位移传感器,其固定端固定在吊臂的底部,活动端与吊臂的顶端连接。
结合第一方面,进一步的,所述通信装置采用无线方式进行通信。
第二方面,还提供了一种起重机防电缆触碰方法,包括:
实时测量吊臂和电缆之间的位置关系;
解析起重机操作员对吊臂进行的控制动作;
对起重机操作员对吊臂进行的控制动作在吊臂和电缆之间的位置关系的基础上进行模拟仿真;
若仿真的结果为吊臂与电缆不会发生碰撞则执行控制动作,若仿真结果为吊臂和电缆会发生碰撞则输出制动控制信号防止吊臂继续运动。
结合第二方面,进一步的,对实时测量到的吊臂和电缆之间的位置关系进行显示。
结合第二方面,进一步的,所述实时测量吊臂和电缆之间的位置关系包括:
建立空间三维坐标系,通过吊臂姿态测量装置测量到的吊臂姿态参数以及电缆方位测量装置测量到的电缆方位参数在空间三维坐标系中解析出吊臂和电缆之间的空间位置关系。
第三方面,还提供了一种起重机防电缆触碰系统,包括:
测量模块,用于实时测量吊臂和电缆之间的位置关系;
动作解析模块,用于解析起重机操作员对吊臂进行的控制动作;
模拟仿真模块,用于对起重机操作员对吊臂进行的控制动作在吊臂和电缆之间的位置关系的基础上进行模拟仿真;
防触碰控制模块,用于若仿真的结果为吊臂与电缆不会发生碰撞则执行控制动作,若仿真结果为吊臂和电缆会发生碰撞则输出制动控制信号防止吊臂继续运动。
本发明有益效果:
1、本发明能够通过上位机预警装置向起重机操作员实时反馈高压输电线缆对于起吊机构的最短距离、俯仰角、侧偏角等方位信息,并能提供可视化的预警信息,直观地指导并警示起重机操作员的控制操作。
2、通过判断程序管控起重机操作员对起吊机构操纵装置的实际操作行为,当起吊机构与输电线缆之间距离已经较近,只允许起重机操作员实施使起吊机构远离输电线缆的各类控制操作,而继续靠近输电线缆的各类控制操作,会发出制动控制信号,使系统有效地限制中间控制环节,防止起吊机构接收到控制操作所导致的输电线缆触碰。
3、流动式起重机的输电线缆防触碰预警与制动系统对起重机原车的改造仅通过接插件的形式进行电气控制的无损改造,实用性较强且技术产品易于推广。
因此,本发明不仅能够依据起重机起吊机构与高压输电线缆之间的距离关系,向起重机操作员提供可视化的预警信息;在距离过近的危险状态下,还能够自动地引导起吊机构进行制动,防止其触碰到输电线缆;并且本发明以无损的方式接入起重机的电气控制系统,具有较好的工程实用性和推广性,能有效保障流动式起重机一类工程机械吊装作业的触电安全防护。
附图说明
图1为本发明的系统框图;
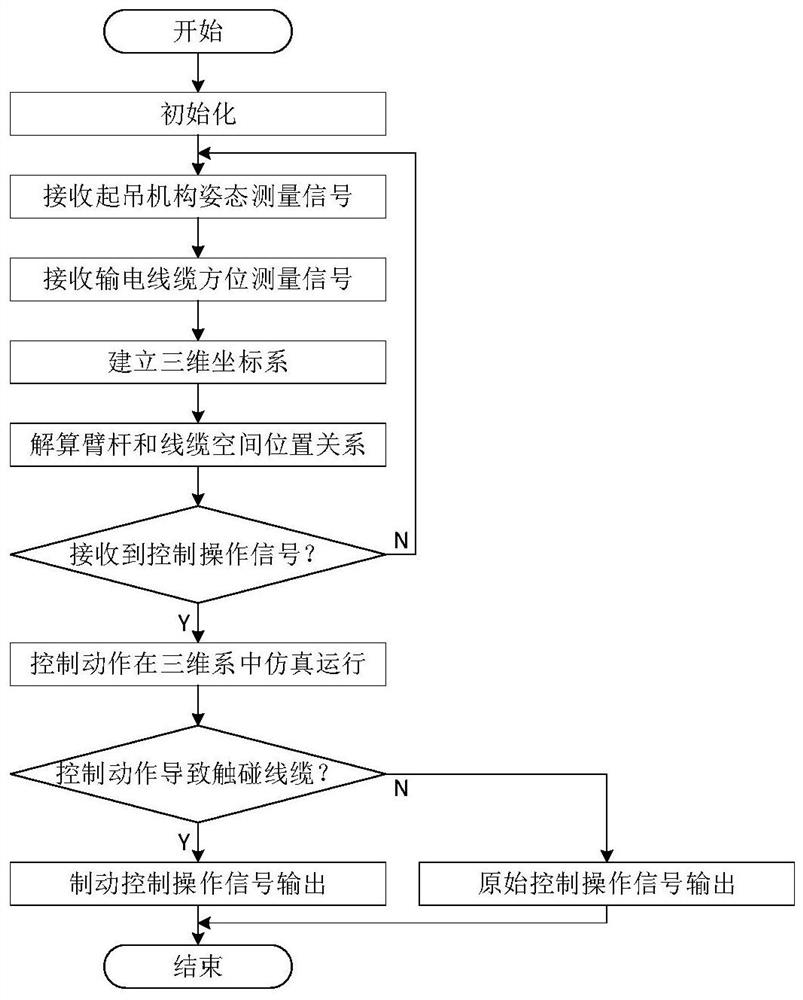
图2为本发明的电缆防触碰安全判断流程图;
图3为本发明空间测量装置安装的结构示意图。
具体实施方式
为了进一步描述本发明的技术特点和效果,以下结合附图和具体实施方式对本发明做进一步描述。
本发明所提供的一种起重机防电缆触碰系统如图1-3所示,主要包括:
实施例1
空间测量装置,用于测量吊臂和电缆之间的位置关系;
电缆防触碰预警装置,用于实时显示吊臂和电缆之间的位置关系;
制动控制装置,用于根据吊臂和电缆之间的位置关系对吊臂进行制动控制;
通信装置,用于实现空间测量装置和电缆防触碰预警装置以及制动控制装置之间的通信。
防触碰预警装置,用来实时显示吊臂和电缆之间的位置关系。
其中,空间测量装置包括吊臂姿态测量装置和电缆方位测量装置;吊臂姿态测量装置和电缆方位测量装置均设置在吊臂的机身上。
所述吊臂姿态测量装置包括姿态角度传感器5和伸缩长度传感器;姿态角度传感器设置于吊臂1的末端侧面,与吊臂长度方向保持平行,伸缩长度传感器采用拉线位移传感器4,其平行于吊臂1设置,其固定端41固定在吊臂1的底部活动端42与吊臂1的顶端连接。
电缆方位测量装置采用毫米波雷达传感器2,设置在吊臂1的顶端,在吊装作业时自高处向外探测输电线缆的距离与电缆方位的俯仰角和侧偏角。
本发明的工作原理如下:
首先,吊臂1是安装在起重机3上的,通过姿态角度传感器5和拉线位移传感器4采集吊臂的姿态参数(吊臂的拉伸长度、俯仰(抬升角)角和侧偏角(旋转角)等),通过毫米波雷达传感器2测量出电缆的方位参数(与电缆的距离,电缆方向的俯仰角和侧偏角等),通过姿态参数和电缆的方位参数可以得到吊臂1与电缆的位置关系,具体为:
建立空间三维坐标系,通过吊臂1姿态测量装置测量到的吊臂姿态参数以及电缆方位测量装置测量到的电缆方位参数在空间三维坐标系中解析出吊臂和电缆之间的空间位置关系。
然后通过通信装置将吊臂1与电缆的位置关系实时的传送(通过有线或者无线WIFI)到防触碰预警装置(采用工业平板电脑)上,以此给操作员做出后续操作参考。
当操作员做出操作指令后,先通过嵌入式控制器对操作员的动作进行模拟仿真,若仿真的结果为吊臂与电缆不会发生碰撞则执行控制动作,反之,若仿真结果为吊臂和电缆会发生碰撞则输出制动控制信号防止吊臂继续运动。
实施例2
还提供了一种起重机防电缆触碰系统,包括:
测量模块,用于实时测量吊臂和电缆之间的位置关系;
动作解析模块,用于解析起重机操作员对吊臂进行的控制动作;
模拟仿真模块,用于对起重机操作员对吊臂进行的控制动作在吊臂和电缆之间的位置关系的基础上进行模拟仿真;
防触碰控制模块,用于若仿真的结果为吊臂与电缆不会发生碰撞则执行控制动作,若仿真结果为吊臂和电缆会发生碰撞则输出制动控制信号防止吊臂继续运动。
本发明对输电线缆方位信息和起吊机构姿态信息进行实时测定,能够通过工业平板电脑上位机向起重机操作员提供可视化的预警信息;在距离过近的危险状态下,还能够通过嵌入式控制器自动地引导起吊机构进行制动,防止其触碰到输电线缆;并且本发明以无损的方式接入起重机的电气控制系统,具有较好的工程实用性和推广性,能有效保障流动式起重机一类工程机械吊装作业的触电安全防护,使工程机械安全控制技术水平与可靠性提高。
上述实施例不以任何形式限定本发明,凡采取等同替换或等效变换的形式所获得的技术方案,均落在本发明的保护范围之内。
- 一种起重机防电缆触碰系统及方法
- 一种塔式起重机防摇摆控制方法及系统