用于料件的加工系统及方法
文献发布时间:2023-06-19 12:19:35
技术领域
本发明涉及自动化设备技术领域,具体的是一种用于料件的加工系统及方法。
背景技术
本部分的描述仅提供与本发明公开相关的背景信息,而不构成现有技术。
晶元是生产集成电路所用的载体,多指单晶硅圆片。单晶硅圆片由普通硅砂拉制提炼,经过溶解、提纯、蒸馏一系列措施制成单晶硅棒,单晶硅棒经过抛光、切片之后,就成为了晶元。目前生产工艺中,还需要对晶元的表面进行加工处理,其中滴蜡工序是比较常见的,这样在液态蜡凝固后会将晶元粘接在支撑件上。由于晶元的厚度较薄,如何有效地对加工后的晶元从支撑件上转移,是目前急需解决的技术问题。
另外由于晶元表面的精准度要求较高,这势必要求晶元的表面在上述工序以及后续的收集工序中产生的磨损要尽可能的小,目前常见的手段均是采用吸附的方式对晶元进行转移,这样造成工艺周期长,且不可避免的接触动作以及吸附力的因素,或多或少会对晶元的表面造成损伤。
应该注意,上面对技术背景的介绍只是为了方便对本发明的技术方案进行清楚、完整的说明,并方便本领域技术人员的理解而阐述的。不能仅仅因为这些方案在本发明的背景技术部分进行了阐述而认为上述技术方案为本领域技术人员所公知。
发明内容
为了克服现有技术中的缺陷,本发明实施例提供了一种用于料件的加工系统及方法,其在有效地降低铲离难度的同时,还能够使得晶元在导向收集过程中与外部机构非接触,避免晶元表面损伤现象的产生。
本申请实施例公开了:一种用于料件的加工系统,包括用于料件的贴蜡机构、转移机构及分离机构,其中所述转移机构和分离机构依次位于所述贴蜡机构的下游,所述分离机构包括位于水平面内的承载单元、位于倾斜平面内的铲片单元、驱动单元以及导向单元,所述承载单元能够在所述驱动单元的作用下由水平面转动至倾斜平面后与所述铲片单元对应设置;
所述承载单元包括支撑基座和支撑平台,所述支撑平台位于水平面内且设置在所述支撑基座上,所述支撑平台上承载有通过蜡体粘接的料件;
所述铲片单元能够在所述支撑平台转动至倾斜平面内后朝向所述支撑平台移动、且在与所述料件的侧壁抵接后推动料件相对所述支撑平台错位移动,以使得料件相对所述支撑平台脱离;
所述导向单元包括倾斜设置且具有进口端和出口端的导向槽,所述进口端能够承接脱离后的料件且位于出口端的上方,所述导向槽内填充有流动的引流液,所述引流液能够承载并引流所述料件由所述进口端移动至所述出口端。
进一步地,所述导向单元的内侧壁和所述导向槽的底部均开设有引流孔,所述引流液能够通过所述引流孔注入所述导向槽内。
进一步地,位于所述导向槽底部的所述引流孔沿引流液的流动方向设置有多组,每组所述引流孔的数量设置有多个且沿垂直于引流液的流动方向设置。
进一步地,每组所述引流孔注入的引流液向上产生的势能力大于料件的重力。
进一步地,所述支撑基座上设置有转动件,所述支撑平台安装在所述转动件的输出端上,所述转动件能够驱动所述驱动平台间歇式转动。
进一步地,包括能够检测料件位置信息的传感件,所述传感件与所述转动件信号连接。
进一步地,所述铲片单元包括铲片本体、第一推动件和第二推动件,所述铲片本体设置在所述第二推动件的输出端上,所述第一推动件能够推动所述第二推动件朝向料件移动,所述第二推动件能够推动所述铲片本体与料件抵接并将料件铲离所述支撑平台。
进一步地,所述铲片本体呈三棱柱状,所述铲片本体的一个侧壁能够贴合所述支撑平台的表面,所述铲片本体的一个棱边用于铲离料件。
本申请实施例还公开了:一种用于料件的加工方法,包括以下步骤:
对料件进行液态贴蜡工序;
对经过贴蜡工序的料件在水平面内进行转移,转移过程中的温度处于室温范围,液态蜡经过流动能够覆盖并凝固在料件的表面和侧壁上;
将液态蜡凝固后的料件由水平面内旋转过预设角度后,使其位于倾平面内;
对位于倾斜平面内的料件施加分离力,使得料件能够通过自身重力滑落;
滑落后的料件落入沿第一方向流动的引流液中,并在引流液的作用下流动至预设位置,其中所述引流液向上产生的势能力大于所述料件的重力
进一步地,在步骤“将液态蜡凝固后的料件由水平面内旋转过预设角度后,使其位于倾平面内;”中,还包括将位于倾斜平面内的料件旋转至待分离位置,并将检测到的所述料件位于待分离位置处的信号进行反馈,使得料件停止转动,进而对料件施加分离力。
借由以上的技术方案,本发明的有益效果如下:
1、本申请中通过设置的支撑单元、铲片单元以及驱动单元的结合,省却了外部的转移单元的引入,在降低成本的基础上,还能够降低安装难度。另外,由于晶元与所述支撑平台之间的贴附力较小,在倾斜状态下进行铲离工序,并且结合重力的因素,晶元能够较容易地相对所述支撑平台脱落,进而有效地降低铲离难度;
2、本申请中通过设置导向单元,每组所述引流孔注入的引流液向上产生的势能力大于料件的重力,也可以理解为该处的引流液向上涌起的动作与向下流动的引流液之间形成了类似于伯努利原理的引流,可以看作是,既具有对晶元施加向上的支撑力,也具有带动晶元向所述出口端流动的导向力,进而对晶元起到收集、导向的工序。
为让本发明的上述和其他目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附图式,作详细说明如下。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
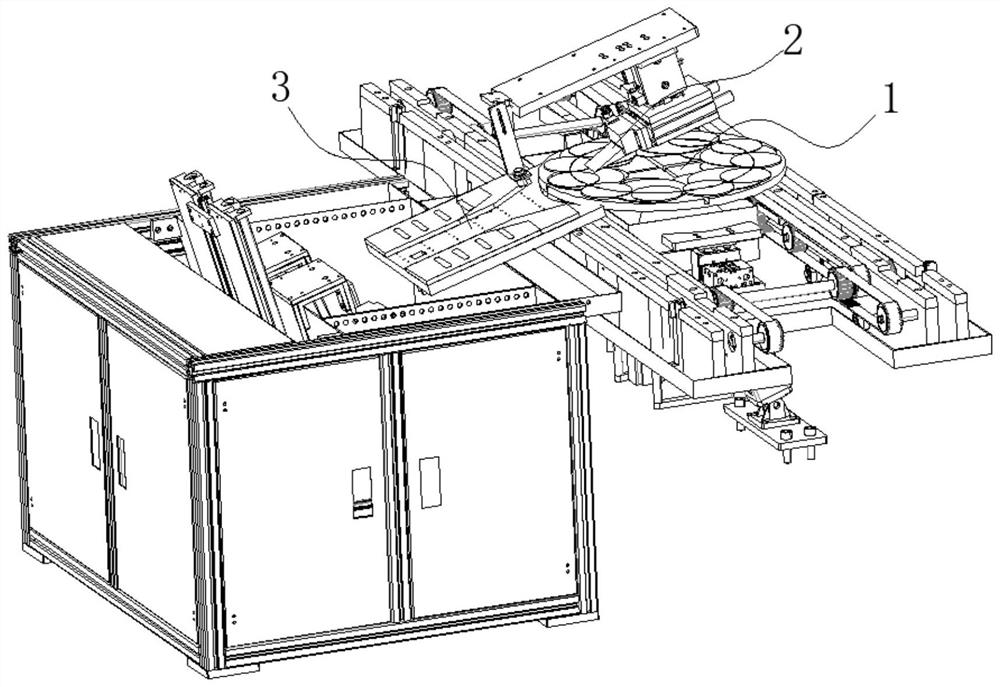
图1是本发明实施例中的整体装置结构示意图;
图2是本发明实施例中的承载单元处的部分结构示意图;
图3是本发明实施例中的承载单元处的又一部分结构示意图;
图4是本发明实施例中的铲片单元处的部分结构示意图;
图5是本发明实施例中的铲片单元处的部分结构示意图。
以上附图的附图标记:1、承载单元;2、铲片单元;3、导向单元;4、传感件;11、支撑基座;12、支撑平台;13、驱动单元;14、转动件;21、铲片本体;22、第一推动件;23、第二推动件;31、导向槽;32、引流孔;100、料件。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明的是,在本发明的描述中,术语“第一”、“第二”等仅用于描述目的和区别类似的对象,两者之间并不存在先后顺序,也不能理解为指示或暗示相对重要性。此外,在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
结合图1至图5所示,本实施方式中公开了一种用于料件的加工系统,包括用于料件100的贴蜡机构、转移机构及分离机构。该料件100可以是生产集成电路所用的载体,例如晶元。其中贴蜡机构用于对晶元的表面做贴蜡工序;转移机构能够在贴蜡工序后将晶元转移,其中值得注意的是,在贴蜡工序和转移工序中,晶元表面的液态蜡流动并凝固,使得晶元粘接在支撑件上;位于转移机构下游的分离机构首先能够与转移机构对接,进而有效地对晶元施加分离力,以使得晶元能够从支撑件上被铲离,实现对加工后的晶元进行收集。
结合图1所示,本实施方式中,所述分离机构包括承载单元1、位于所述承载单元1上方的铲片单元2、驱动单元13以及位于所述承载单元1左前方的导向单元3。其中,值得注意的是,所述承载单元1能够在所述驱动单元13的作用下由水平面转动至倾斜平面后与所述铲片单元2对应设置。
结合图2至图3所示,本实施方式中,所述承载单元1包括支撑基座11、设置在所述支撑基座11上的支撑平台12,其中所述支撑平台12位于所述支撑基座11的上方且位于水平面内。该支撑平台12呈圆盘状,多个晶圆呈环形阵列分布在所述支撑平台12上。值得注意的是,在晶元上的蜡体凝固之前,该晶元一直处于水平面内,也相当于要求所述支撑平台12处于水平面内。在晶元上的蜡体凝固后,此时由于蜡体的流动性使得晶元粘接在所述支撑平台12上,再通过驱动单元13推动所述承载单元1旋转过预设角度,进行后续的铲离工序。此处的预设角度在15-25°之间。
本实施方式中,所述驱动单元13位于所述支撑基座11的左侧,本方式中的所述驱动单元13可以为顶出气缸。所述顶出气缸的输出端与所述支撑基座11连接,以使得所述顶出气缸能够在斜向上顶出的过程中推动整个所述支撑单元相对水平面转过预设角度。
其中一个可行的实施方式中,所述支撑基座11上设置有转动件14,其中所述转动件14可以采用步进电机,所述步进电机的输出轴沿竖直方向延伸,并能够与位于水平面内的所述支撑平台12的中心固定设置,以在固定脉冲的输入下带动所述支撑平台12间歇式转动,进而带动多个晶元分别移动至预设位置,进而便于铲离。
结合图4所示,本实施方式中,所述铲片单元2与所述支撑平台12对应设置,其中所述铲片单元2包括铲片本体21、第一推动件22和第二推动件23。所述铲片本体21呈水平方式的三棱柱状,该铲片本体21的截面呈直角三角形状。其中,所述铲片本体21的下表面能够与所述支撑平台12的表面贴合,所述铲片的一个棱边能够与晶元的侧壁抵接,以用于铲离料件100。
上述的设置方式中,所述第一推动件22和第二推动件23均可以为气缸件,其中所述第二推动件23设置在所述第一推动件22的输出端上,所述铲片本体21设置在所述第二推动件23的输出端上。上述第一推动件22和第二推动件23的设置,目的是使得所述铲片本体21能够与晶元的侧壁能够抵接,进而在抵接力的作用下使得晶元从所述支撑平台12上铲离。
具体地,所述第一推动件22能够在上下方向上往复移动,进而推动所述铲片本体21能够朝向所述支撑平台12移动,直至所述铲片本体21的一个侧面与所述支撑平台12贴合;所述第二推动件23能够在斜面内移动,该斜面与倾斜后的所述支撑平台12所处的平面平行设置,所述第二推动件23首先在斜面内推动所述铲片本体21朝向晶元移动,与晶元抵接后再向前施加抵接力,使得晶元能够从所述支撑平台12被铲离,进而通过自身重力从所述支撑平台12上滑落至下游的所述导向单元3。
上述设置方式中,所述铲片本体21完成一个周期的动作能够把其中一个晶元从所述支撑平台12上铲离。根据生产需要,所述支撑平台12上设置有多个晶元,当其中一个晶元相对所述支撑平台12脱落后,所述支撑平台12再所述转动件14的驱动下间歇式地转过一定角度。此处为了使得每一次转过的角度基本相等,本申请中还设置有传感件4。所述传感件4位于所述支撑平台12的上方且适配设置,该传感件4能够对晶元的位置信息进行检测,并且能够与所述转动件14信号连接,一旦晶元被转动到位时,所述传感件4能够将检测到的信息反馈至所述转动件14,所述转动件14停止转动,以保证铲离工序的有效进行。
结合图5所示,本实施方式中,所述导向单元3包括倾斜设置且具有进口端和出口端的导向槽31,其中所述进口端位于所述出口端的上方。具体地,所述导向单元3包括呈长条状的导向本体,所述导向本体的上表面向下凹陷形成有所述导向槽31。其中所述导向本体的内侧壁和所述导向槽31的底部均开设有引流孔32,通过该引流孔32的设置能够使得引流液填充在所述导向槽31内,并且该所述引流液一直处于流动的趋势。
通过上述的设置方式,从所述支撑平台12滑落的晶元从所述进口端落入所述导向槽31内;位于所述导向槽31内的所述引流液能够承载并引流晶元有所述进口端移动至出口端。
其中,值得注意的是,位于所述导向槽31底部的所述引流孔32沿引流液的流动方向设置有多组,每组所述引流孔32的数量设置有多个且沿垂直于引流液的流动方向设置。通过上述的设置方式,每组所述引流孔32注入的引流液向上产生的势能力大于料件100的重力,也可以理解为该处的引流液向上涌起的动作与向下流动的引流液之间形成了类似于伯努利原理的引流,可以看作是,既具有对晶元施加向上的支撑力,也具有带动晶元向所述出口端流动的导向力,进而对晶元起到收集、导向的工序。
值得注意的是,所述导向槽31的宽度大于晶元的直径,且通过侧壁上的所述引流孔32涌出的引流液使得晶元在引流的过程中稳定地处于导向槽31的中间位置处,避免与所述导向本体接触,进而避免晶元表面在导向过程中产生损伤现象的出现。
本实施方式中还公开了一种用于料件的加工方法,此方法中的料件100可以为呈薄片状的晶元等,包括以下步骤:
对晶元进行液态贴蜡工序,通过贴蜡机构将呈液态的蜡体均匀地涂覆在晶元的表面。
对经过贴蜡工序的晶元在水平内通过所述转移机构转移至所述分离机构上,转移过程中的温度处于室温范围,液态蜡经过流动能够覆盖并凝固在晶元的表面、侧壁、以及所述分离机构的支撑平台12的表面。
将液态蜡凝固后的晶元通过所述转动件14由水平面内旋转过预设角度后,再通过所述驱动单元13使其位于倾平面内;再多个晶元重复被铲离工序中,通过传感件4将检测到的所述晶元位于待分离位置处的信号进行反馈,使得所述支撑平台12停止转动,进而对晶元施加分离力。
通过所述铲片单元2对位于倾斜平面内的料件100施加分离力,使得晶元能够通过自身重力滑落。
滑落后的料件100落入沿第一方向流动的引流液中,并在引流液的作用下流动至预设位置,其中所述引流液向上产生的势能力大于所述料件100的重力。
具体地,位于所述导向槽31底部的所述引流孔32沿引流液的流动方向设置有多组,每组所述引流孔32的数量设置有多个且沿垂直于引流液的流动方向设置。通过上述的设置方式,每组所述引流孔32注入的引流液向上产生的势能力大于料件100的重力,也可以理解为该处的引流液向上涌起的动作与向下流动的引流液之间形成了类似于伯努利原理的引流,可以看作是,既具有对晶元施加向上的支撑力,也具有带动晶元向所述出口端流动的导向力,进而对晶元起到收集、导向的工序。
具体地,所述导向槽31的宽度大于晶元的直径,且通过侧壁上的所述引流孔32涌出的引流液使得晶元在引流的过程中稳定地处于导向槽31的中间位置处,避免与所述导向本体接触,进而避免晶元表面在导向过程中产生损伤现象的出现。
本发明中应用了具体实施例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
- 用于料件的加工系统及方法
- 用于设置激光加工系统中的激光束的焦点位置的装置、包括该装置的激光加工系统以及用于设置激光加工系统中的激光束的焦点位置的方法