架空线路导地线锈蚀检测装置、无人机及应用方法
文献发布时间:2023-06-19 13:29:16
技术领域
本发明涉及电气检修领域,尤其涉及一种架空线路导地线锈蚀检测装置、无人机及应用方法。
背景技术
架空线路导地线目前常采用钢芯铝绞线、镀锌钢绞线等良导体,担负着从电源侧向电力负荷中心输送电能的作用。架空输电导地线由于直接裸露在大气环境中,与空气中的水分、氧气、盐类物质等介质反应发生锈蚀,从而导致抗拉强度降低安全风险增大。因锈蚀问题造成的断线、跑线事故时有发生,严重影响了输电的安全,因此对导地线的锈蚀情况进行检测具有重要意义。但导线内部钢芯不同程度的锈蚀无法通过常规的巡视进行评判,常规方法是通过切线取样进行观察,这种方法检测周期长、效率低,且仅利用停电窗口期进行线路检测,难以满足日益增长的电力需求。
激光三维扫描技术是一种全自动高精度的非接触式扫描技术,采用高速激光扫描测量的方式,可以快速得到被测物体表面的采样点,通过采样点可以高分辨率地构建出物体表面的三维坐标数据,获得结构复杂的,现实场景下的三维可视化模型。由于激光三维扫描技术能够大面积地获取被测物体的数据采样点,与传统单点测量相比,实现了面测量的技术突破。利用激光三维扫描技术能够在非接触式的情况下建立出导地线的三维点云模型,但如何将便捷、准确地实现带电条件下的三维扫描是亟需解决的技术问题。
现有技术中,专利CN202011542190.1公开了一种基于雷达扫描与视觉覆盖的无人机侦测系统,在无人机底部设置电动环形导轨和摄像头,使得摄像头沿电动环形导轨周向运动,但该方案仅能够调整水平方向的检测视角,不能够很好的适用于架空线路导地线的检测,专利CN201510820742.3公开了一种基于旋翼无人机的扫描成像系统的成像方法,在无人机底部设置三轴无刷云平台来控制扫描成像系统转动,但该方案过程控制复杂,且机械结构成本较高。
发明内容
本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种架空线路导地线锈蚀检测装置、无人机及应用方法,能够适用于架空线路导地线的检测要求,控制复杂度低且成本较低。
为解决上述技术问题,本发明提出的技术方案为:
一种架空线路导地线锈蚀检测装置,包括本体和连接板,所述本体通过连接板和外部的无人机连接,所述本体包括弧形的轨道、连接机构以及三维扫描设备,所述连接机构沿所述轨道滑动设置,且所述轨道通过连接机构和三维扫描设备连接,所述轨道沿被检测的架空线路导地线的周向布置,使得连接机构沿所述轨道滑动时带动所述三维扫描设备沿被检测的架空线路导地线的周向扫描。
进一步的,所述轨道包括水平方向平行设置的一对弧形导轨,所述连接机构包括第一连接杆和第二连接杆,所述第一连接杆两端均设有行走机构,且所述行走机构分别和对应的弧形导轨配合,所述第一连接杆通过第二连接杆和三维扫描设备连接。
进一步的,所述第一连接杆为管状结构,所述第一连接杆的内孔中设有控制单元,所述行走机构包括驱动单元和滚轮,所述弧形导轨开设有导向槽,所述控制单元和驱动单元的控制端连接,所述驱动单元的转动轴和滚轮连接,所述滚轮设置于导向槽中,使得所述驱动单元受控驱动滚轮沿导向槽移动。
进一步的,所述导向槽的两端分别设有限位块,使得第一连接杆在弧形导轨上的滑动范围被限制。
进一步的,所述第二连接杆顶端设有换向调节单元,所述第二连接杆通过换向调节单元和第一连接杆连接。
进一步的,所述第二连接杆底端设有固定单元,所述第二连接杆通过固定单元和三维扫描设备连接。
进一步的,所述轨道两端分别设有支架,所述轨道和支架围绕成用于容纳三维扫描设备以及被检测的架空线路导地线的空间,且所述支架之间的顶端距离小于底端距离。
进一步的,所述连接板顶部设有用于连接外部的无人机的卡箍。
本发明还提出一种无人机,所述无人机底部安装有所述的架空线路导地线锈蚀检测装置。
本发明还提出一种所述的架空线路导地线锈蚀检测装置应用方法,包括以下步骤:
1)通过卡箍将架空线路导地线锈蚀检测装置与无人机连接,调整换向调节单元至合适角度;
2)启动无人机升空并悬停至架空线路导地线上方位置,控制无人机沿架空线路导地线飞行,并控制连接机构延轨道往复运动,带动三维扫描设备沿架空线路导地线的周向扫描;
3)获取扫描图像数据并比较预设的特征信息,判断锈蚀情况及断线风险。
与现有技术相比,本发明的优点在于:
1.本发明由无人机搭载,能够在不停电的情况下开展架空线路导地线锈蚀检测,且本体的轨道沿导地线周向布置,使得连接机构在轨道滑动时能够带动三维扫描设备沿导地线周向进行扫描,以获取扫描面的尺寸信息和结构信息,因此适用于架空线路导地线的应用场景,便于操作人员及时且全面的掌握导地线的锈蚀情况。
2.本发明的轨道采用一对平行布置的弧形导轨,连接机构采用第一连接杆两端安装行走机构在弧形导轨滑动的形式,一方面增加了结构强度,另一方面采用多个行走机构增加了设备可靠性,同时第一连接杆通过换向调节单元以及第二连接杆和三维扫描设备连接,能够进行三维扫描设备多角度调节,以实现在测量过程中根据实际需要,从不同角度扫描检测导地线的周向锈蚀情况。
3.本发明在轨道两端分别设有支架,且两个支架之间的顶端距离小于底端距离,形成一个类三角形的稳固结构,一方面使得本发明的装置在地面放置稳固,能够承受顶部的无人机的重量,且避免轨道以及三维扫描设备与地面发生磕碰,另一方面,在进行检测时能起到限位的作用,避免无人机与导地线距离太远或者位置错误,导致不能得到理想的检测结果,且两个支架之间形成一个喇叭状的开口,更加易于将导地线纳入轨道和支架之间的空间进行检测。
附图说明
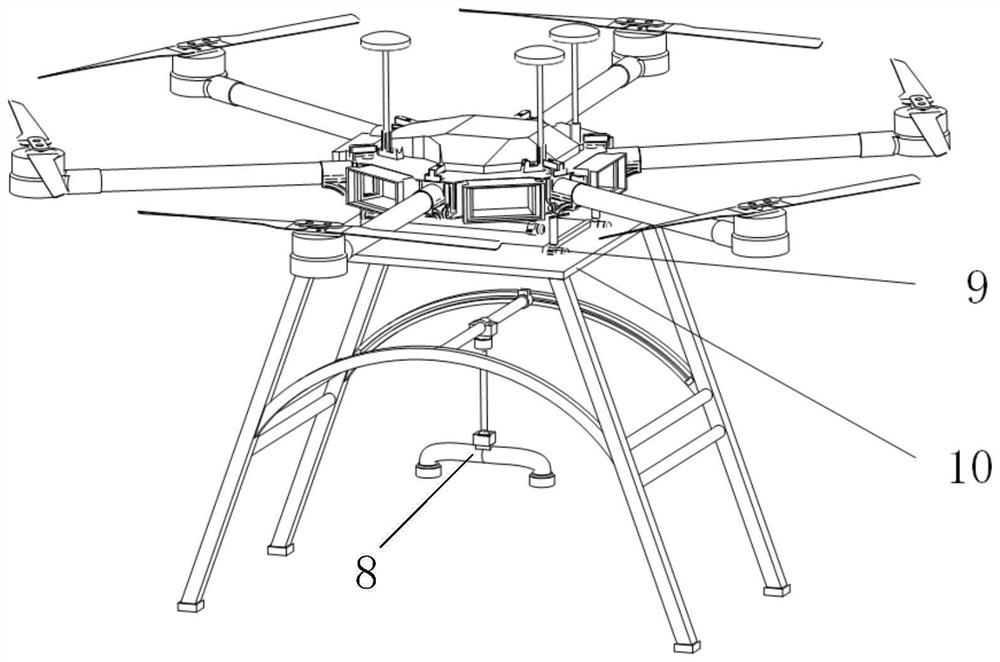
图1为本发明实施例的架空线路导地线锈蚀检测装置和无人机的安装示意图。
图2为本发明实施例的架空线路导地线锈蚀检测装置工作原理示意图。
图3为本发明实施例的架空线路导地线锈蚀检测装置结构图。
图4为本发明实施例的无人机俯视图。
图例说明:1-支架、2-弧形导轨、3-第一连接杆、4-联轴器、5-限位块、6-第二连接杆、7-夹具、8-三维扫描设备、9-卡箍、10-连接板。
具体实施方式
以下结合说明书附图和具体优选的实施例对本发明作进一步描述,但并不因此而限制本发明的保护范围。
如图1所示,本实施例提出一种架空线路导地线锈蚀检测装置,包括本体和连接板10,本体通过连接板10和外部的无人机连接,如图2所示,本实施例中的本体包括弧形的轨道、连接机构以及三维扫描设备8,连接机构沿轨道滑动设置,且轨道通过连接机构和三维扫描设备8连接,图2中阴影圆形部分为被检测的架空线路导地线的截面,本实施例中的轨道沿被检测的架空线路导地线的周向布置,使得连接机构沿轨道滑动时带动三维扫描设备8沿被检测的架空线路导地线的周向扫描。
本实施例中的三维扫描设备8为激光三维扫描设备,由于三维扫描设备8能够获取其投影方向的区域内的结构信息,且当三维扫描设备8位于架空线路导地线的正上方时,其基本能够检测到架空线路导地线上半部分,因此,本实施例中设置轨道弧度为180°,如图2所示,当三维扫描设备8随连接机构滑动至轨道两端时,其基本能够检测到架空线路导地线左半部分和右半部分,将三维扫描设备8从轨道一端滑动到另一端所获取的架空线路导地线所有面积信息和结构信息进行综合,就能够得到当前一段架空线路导地线周向的面积信息和结构信息。
本实施例中的轨道和连接机构可以具有多种形式,例如,轨道可采用单根弧形导轨,连接机构顶端设置行走机构,且底端和三维扫描设备8连接,行走机构与导轨配合,由行走机构在导轨上往复运动,或者,轨道可采用单根弧形导轨,以架空线路导地线轴向为X轴,径向所在平面为YZ平面,弧形导轨的外部沿YZ平面套设缆绳,且一端设置缆绳驱动轮而另一端设置缆绳导向轮,连接机构一端固定于缆绳上且另一端和三维扫描设备8连接,由缆绳驱动轮驱动缆绳带动连接机构往复运动。
为了增加结构强度以及运动可靠性,如图3所示,本实施例的轨道包括水平方向平行设置的一对弧形导轨2,连接机构包括第一连接杆3和第二连接杆6,第一连接杆3两端均设有行走机构,且行走机构分别和对应的弧形导轨2配合,第一连接杆3通过第二连接杆和三维扫描设备8连接,采用多个行走机构增加了设备可靠性。
本实施例中的第一连接杆3为管状结构,第一连接杆3的内孔中设有控制单元,行走机构包括驱动单元和滚轮,弧形导轨2开设有导向槽,驱动单元具体为步进电机或者伺服电机,控制单元和步进电机或者伺服电机的控制端连接,步进电机或者伺服电机的转动轴和滚轮连接,滚轮设置于导向槽中,使得步进电机或者伺服电机受控驱动滚轮沿导向槽往复移动。
本实施例中的导向槽的两端分别设有限位块5,使得第一连接杆3在弧形导轨2上的滑动范围被限制,且避免第一连接杆3与弧形导轨2的两端发生碰撞造成损坏。
本实施例中的第二连接杆6顶端设有换向调节单元4,所述第二连接杆6通过换向调节单元4和第一连接杆3连接。且第二连接杆6底端设有固定单元7,所述第二连接杆6通过固定单元7和三维扫描设备8连接。
具体的,本实施例的换向调节单元4采用万向联轴器,通过调节万向联轴器的方向,能够使得三维扫描设备8进行多方向、多角度扫描,以实现在测量过程中根据实际需要,从不同角度扫描检测导地线的周向锈蚀情况。
具体的,本实施例的固定单元7采用与三维扫描设备8适配的夹具,夹具内侧安装有橡胶条来减少工作中无人机产生的震动,使得三维扫描设备8的扫描结果更加精确。
如图3所示,本实施例中的轨道两端分别设有H型的支架1,轨道和支架1围绕成用于容纳三维扫描设备8以及被检测的架空线路导地线的空间,且支架1之间的顶端距离小于底端距离。一方面使得本实施例的装置在地面放置稳固,能够承受顶部的无人机的重量,且避免轨道以及三维扫描设备8与地面发生磕碰,另一方面,在进行检测时能起到限位的作用,避免无人机与导地线距离太远或者位置错误,导致不能得到理想的检测结果,且两个支架1之间形成一个喇叭状的开口,更加易于将导地线纳入轨道和支架1之间的空间进行检测。
本实施例中的连接板10顶部设有用于连接外部的无人机的卡箍9。
本实施例中,连接板10采用减震合金板,支架1采用抗震支架,抗震支架通过焊接与减震合金板相连接,从而结构牢固且不易晃动,有效减缓工作中无人机产生的震动对三维扫描设备8扫描效果的干扰,稳定可靠。
本实施例中,抗震支架和弧形导轨2均采用铝合金制成,此外也可以根据需要采用其他金属或者高分子复合材料制备,使得整个装置的重量较轻,在实际应用中减小了无人机的负载,提高续航时间。
本实施例还提出一种无人机,如图4所示,该无人机底部安装有本实施例中的架空线路导地线锈蚀检测装置。
本实施例还提出一种根据本实施例中的架空线路导地线锈蚀检测装置应用方法,包括以下步骤:
1)通过卡箍9将架空线路导地线锈蚀检测装置与无人机连接,调整换向调节单元4至合适角度;
2)启动无人机升空并悬停至架空线路导地线上方位置,根据目标线路制定好飞行路线,控制无人机沿架空线路导地线飞行,并控制连接机构延轨道往复运动,带动三维扫描设备8沿每一段架空线路导地线的周向扫描,从而得到每一段架空线路导地线周向的尺寸信息以及结构信息;
3)获取扫描图像数据并比较预设的特征信息,判断锈蚀情况及断线风险,本实施例中,预设的特征信息包括依据金属腐蚀特征演化规律划分的五个锈蚀等级所对应的特征信息,其中:
I级(无锈蚀):特征为新镀锌钢绞线,尚未产生白锈;
II级(轻微锈蚀):特征为出现锌盐白锈,镀锌层光泽变暗;
III级(一般锈蚀):特征为局部镀锌层发黑位置出现棕色铁锈,表面粗糙;
IV级(较重锈蚀):特征为镀锌钢绞线表面整体被黄锈覆盖,但锈蚀胀粗程度未超过8%,此时存在一定安全风险;
V级(严重锈蚀):特征为镀锌钢绞线表面全部被黄锈覆盖且锈蚀胀粗程度超过8%,或由于锈蚀产物剥裂产生毛刺,此时断线风险极大,应立即更换。
在发生严重锈蚀或者是锈蚀的后期过程中,铁锈进一步发展形成毫米级的明显蚀坑,表面明显凹凸不平,最后铁锈成为红褐色或暗红色三氧化二铁并联结成片,疏松膨胀呈颗粒状或层层剥落,导地线的截面积和体积都会减小。因此,除比较预设的特征信息以外,本实施例以架空线路导地线半径变化率是否超过8%作为判据作为钢绞线更换的标准。
本实施例中进行检测的架空线路导地线使用的型号为G50钢绞线,其线芯结构为6+1,单线直径为3.2mm,理论横截面积56.3mm
通过上述内容可以看出,本实施例和现有技术相比具有下述优点:
1、装置结构合理、安装便捷,将三维激光扫描设备通过无人机搭载,能够在空中悬停条件下完成清晰成像。并且借由第一连接杆3的电机驱动,能够使三维激光扫描设备在弧形导轨2上滑动,实现多角度扫描检测导地线的锈蚀情况,并获取界面尺寸信息,蚀坑大小深度等结构信息。
2、属于无损检测技术,打破常规检测手段需要停电剖线取样的局限性,具有操作简单,检测效率高等特点,适用于架空线路导地线检测,能够及时掌握导地线的锈蚀情况,以及是否存在断股、断线等安全隐患。
3、属于带电检测技术,架空线路导地线锈蚀情况带电检测装置可由无人机全自动开展作业,能够实现架空线路在不停电情况下开展常态化导地线锈蚀程度评估,填补了导地线锈蚀情况无法带电无损检测的空白,工程应用价值潜力巨大。
上述只是本发明的较佳实施例,并非对本发明作任何形式上的限制。虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明。因此,凡是未脱离本发明技术方案的内容,依据本发明技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本发明技术方案保护的范围内。
- 架空线路导地线锈蚀检测装置、无人机及应用方法
- 一种架空输电线路导地线上的走线装置