一种工业机器人运动控制装置及其控制方法
文献发布时间:2023-06-19 13:51:08
技术领域
本发明涉及工业技术领域,具体为一种工业机器人运动控制装置及其控制方法。
背景技术
工业是对自然资源的开采、采集和对各种原材料进行加工的社会物质生产部门,工业是加工制造产业,工业是社会分工发展的产物,经过手工业、机器工业几个发展阶段,工业是第二产业的组成部分,分为轻工业和重工业两类,2014年,中国工业生产总值达4万亿美元,超过美国成为世界头号工业生产国,机器人是一种能够半自主或全自主工作的智能机器,历史上最早的机器人见于隋炀帝命工匠按照柳抃形象所营造的木偶机器人,施有机关,有坐、起、拜、伏等能力,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
在工业机器人的控制领域中需要涉及到控制装置,控制装置就是实现对机器人工作路线和动作等情况的控制,因此对于控制装置的保护很有必要,但是常用的控制装置大多没有设置防护机构,导致其中使用过程中容易损坏,且常用的控制装置因大多具有一定的自重,导致其移动也较为不便,为此提出一种工业机器人运动控制装置及其控制方法。
发明内容
(一)解决的技术问题
针对现有技术的不足,本发明提供了一种工业机器人运动控制装置及其控制方法,解决了上述背景技术中提出的问题。
(二)技术方案
为实现以上目的,本发明通过以下技术方案予以实现:一种工业机器人运动控制装置,包括控制设备本体和监控单元,所述控制设备本体两侧的顶部和底部固定连接有支撑板,所述控制设备本体通过支撑板固定连接有壳体,所述壳体的内底壁固定连接有用于对控制设备本体进行定位散热的辅助散热机构,所述壳体的正面和背面分别通过滑槽滑动连接有第一支撑架和第二支撑架,所述第一支撑架和第二支撑架间设有连接板,并通过所述连接板对第一支撑架和第二支撑架进行固定连接,所述壳体上表面的四角处均固定连接有吊绳,所述吊绳的数量为四个,两个所述吊绳为一组,分两组,每组所述吊绳的表面均共同固定连接有缓冲调节机构,两个所述缓冲调节机构的表面共同设有防护罩,所述控制设备本体的表面设有内温度传感器,所述第一支撑架和第二支撑架的表面均设有外温度传感器,所述防护罩的表面安装有蜂鸣器,所述第一支撑架和第二支撑架一侧的顶部和底部均设有雷达传感器;
所述监控单元包括固定安装于防护罩表面的单片机处理器,所述单片机处理器的输出端双向电性连接有温度采集模块,所述单片机处理器的输出端双向电性连接有数据对比模块,所述单片机处理器的输出端双向电性连接有预警模块,所述单片机处理器的输出端双向电性连接有控制模块,所述单片机处理器与避障模组信号连接;
所述避障模组包括摄像头、障碍传感器和信息识别模组,所述摄像头和障碍传感器均通过导线与工业机器人电性连接;
所述温度采集模块包括用于采集控制设备本体不同区域温度情况的设备温度采集模组和用于采集当前环境温度的环境温度采集模组,所述设备温度采集模组通过导线与内温度传感器电性连接,所述环境温度采集模组通过导线与外温度传感器电性连接;
所述数据对比模块包括用于预设控制设备本体不同温度阀值的预设模组和用于对比温度采集模块实际采集数据和预设模组预设数据差值的差值波动模组;
所述预警模块包括高温预警模组和防碰撞模组,所述雷达传感器和蜂鸣器均通过导线与预警模块电性连接;
所述控制模块包括时钟调控模组、储存模组和信号收发模组。
可选的,所述辅助散热机构包括固定连接于壳体内底壁的底座,所述底座的一侧安装有电机,所述电机的输出端固定连接有螺纹杆,所述螺纹杆的表面螺纹连接有活动座。
可选的,所述活动座的内部滑动连接有齿环,所述齿环的表面固定连接有散热器,所述齿环的下表面啮合有齿轮,所述齿轮的表面固定安装有驱动电机,所述驱动电机安装于活动座的表面。
可选的,所述缓冲调节机构包括固定连接于防护罩一侧壁的调节电机,所述调节电机的输出端固定连接有双向螺纹杆。
可选的,所述双向螺纹杆的两端均螺纹连接有螺纹环,所述双向螺纹杆的表面靠近螺纹环滑动连接有活动环,一组所述吊绳的一端分别固定于两个活动环的下表面。
可选的,所述防护罩的内顶壁固定连接有稳定杆,所述螺纹杆和活动环均滑动套接于稳定杆的表面,所述双向螺纹杆的表面套接有弹簧,所述弹簧的一端固定连接于螺纹环的表面,所述弹簧的另一端固定连接于活动环的表面,所述防护罩的内部转动安装有导向滚轴,所述吊绳搭接于导向滚轴的表面。
可选的,所述壳体下表面的四角处均固定连接有滚轮,所述防护罩固定于第一支撑架和第二支撑架的表面。
本发明提供了一种工业机器人运动控制装置的控制方法,包括以下步骤;
S1)、使调节电机通电使其输出端正向带动双向螺纹杆转动,双向螺纹杆与其两端的螺纹环形成螺纹配合,使其相互靠近,并通过弹簧带动滑动环同步于双向螺纹杆的表面滑动;
S2)、在步骤S1)中两个螺纹环相互靠近的过程中,壳体通过吊绳的放线向下移动,当滚轮接触地面时,推动该控制设备本体移动于合适的位置;
S3)、当步骤S2)中移动于合适的位置后,使调节电机带动双向螺纹杆反向转动,使两个螺纹环相互远离,吊绳通过活动环的滑动带动壳体向上移动,完成控制设备本体的放置;
S4)、在控制设备本体进行控制工作时,温度采集模块对周围环境温度和控制设备本体不同区域内的温度进行检测,将其检测数据与预警模块进行差值对比;
S5)、差值在安全范围内,单片机处理器给予电机信号使其启动,通过螺纹杆的转动使散热器移动于高温区域,此时驱动电机启动带动齿轮转动并与齿环形成啮合转动,进一步调整散热器的位置,调整完成后,散热器工作对高温区域进行散热,若差值不在安全范围内,蜂鸣器启动提醒工作人员需要进行及时的查看;
S6)、控制设备本体在对工业机器人控制的同时,同步控制其上的摄像头和障碍传感器,对其周围环境进行探测,信息识别模组对其探测的信息进行识别并传送给单片机处理器,若是无障碍物,控制设备本体对工业机器人进行正常控制,若存在障碍物,预警模块发起警报。
(三)有益效果
本发明提供了一种工业机器人运动控制装置及其控制方法,具备以下有益效果:
1、该一种工业机器人运动控制装置及其控制方法,通过调节电机、双向螺纹杆、螺纹环、弹簧、滑动环和滚轮等结构的设置,启动调节电机使其输出端正向带动双向螺纹杆转动,双向螺纹杆与其两端的螺纹环形成螺纹配合,使其相互靠近,并通过弹簧带动滑动环同步于双向螺纹杆的表面滑动,使两个螺纹环相互靠近并通过吊绳的放线使壳体向下移动,当滚轮接触地面时,即可推动该装置进行移动调整,便于不同情况下的调节使用。
2、该一种工业机器人运动控制装置及其控制方法,通过调节电机、双向螺纹杆、螺纹环、弹簧、滑动环和滚轮等结构的设置,在控制设备本体进行使用过程中受到震动时,壳体通过吊绳带动活动环于双向螺纹杆的表面滑动,使得弹簧产生压缩形变,从而可以对震动进行有效的减缓,有利于控制设备本体的减震保护。
3、该一种工业机器人运动控制装置及其控制方法,通过采集模块、预警模组、内温度传感器、外温度传感器和雷达传感器等结构的设置,在控制设备本体进行控制工作时,温度采集模块对周围环境温度和控制设备本体不同区域内的温度进行检测,将其检测数据与预警模块进行差值对比,差值在安全范围内,单片机处理器给予电机信号使其启动,通过螺纹杆的转动使散热器移动于高温区域,此时驱动电机启动带动齿轮转动并与齿环形成啮合转动,进一步调整散热器的位置,调整完成后,散热器工作对高温区域进行散热,若差值不在安全范围内,蜂鸣器启动提醒工作人员需要进行及时的查看,从而提高了设备本体使用时的安全性。
附图说明
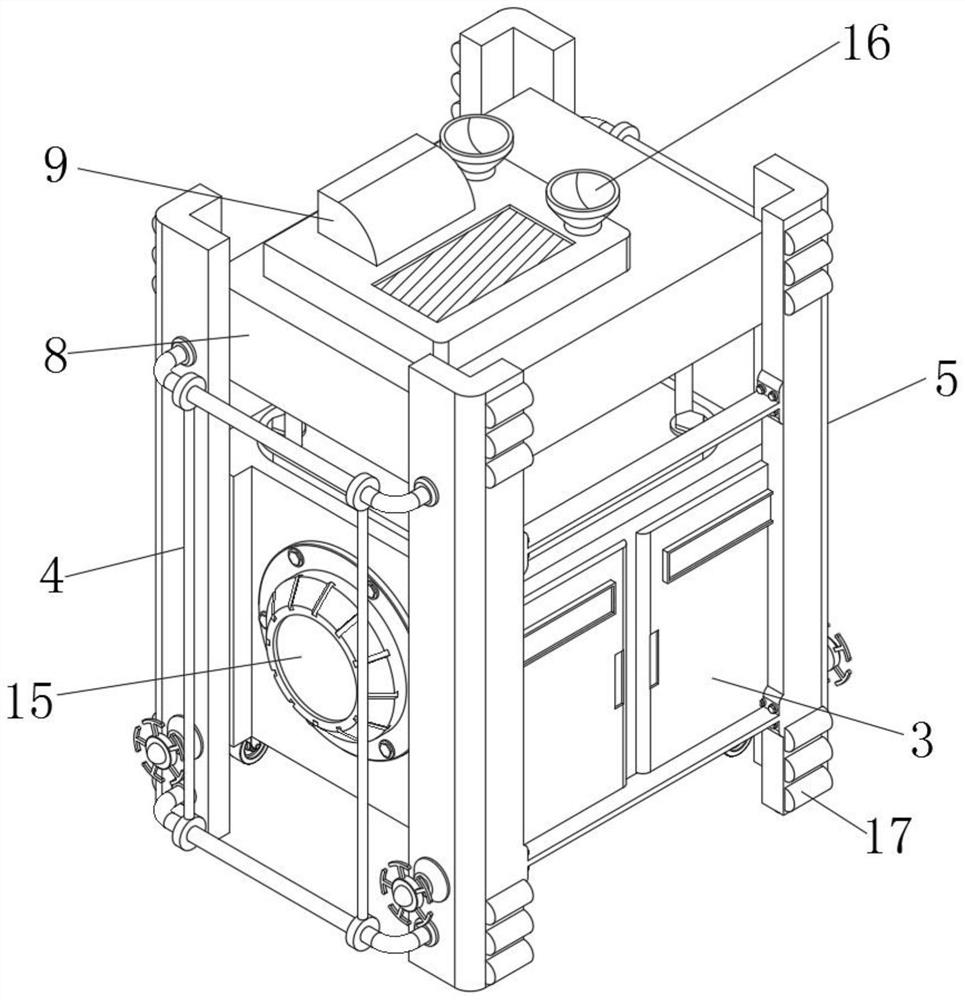
图1为本发明结构示意图;
图2为本发明第二形态结构示意图;
图3为本发明仰视结构示意图;
图4为本发明辅助散热机构结构示意图;
图5为本发明部分拆解结构示意图;
图6为本发明防护罩内部结构示意图;
图7为本发明壳体内部结构示意图;
图8为本发明监控单元系统示意图。
图中:1、控制设备本体;2、支撑板;3、壳体;4、第一支撑架;5、第二支撑架;6、连接板;7、吊绳;8、防护罩;9、单片机处理器;10、温度采集模块;1001、设备温度采集模组;1002、环境温度采集模组;11、数据对比模块;1101、预设模组;1102、差值波动模组;12、预警模块;1201、预警模组;1202、防碰撞模组;13、控制模块;1301、时钟调控模组;1302、储存模组;1303、信号收发模组;14、内温度传感器;15、外温度传感器;16、蜂鸣器;17、雷达传感器;18、底座;19、电机;20、螺纹杆;21、活动座;22、齿环;23、散热器;24、齿轮;25、调节电机;26、双向螺纹杆;27、螺纹环;28、活动环;29、稳定杆;30、弹簧;31、导向滚轴;32、滚轮;33、避障模组。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1至图8,本发明提供技术方案:一种工业机器人运动控制装置,包括控制设备本体1和监控单元,控制设备本体1两侧的顶部和底部固定连接有支撑板2,控制设备本体1通过支撑板2固定连接有壳体3,壳体3的内底壁固定连接有用于对控制设备本体1进行定位散热的辅助散热机构,壳体3的正面和背面分别通过滑槽滑动连接有第一支撑架4和第二支撑架5,第一支撑架4和第二支撑架5间设有连接板6,并通过连接板6对第一支撑架4和第二支撑架5进行固定连接,壳体3上表面的四角处均固定连接有吊绳7,吊绳7的数量为四个,两个吊绳7为一组,分两组,每组吊绳7的表面均共同固定连接有缓冲调节机构,两个缓冲调节机构的表面共同设有防护罩8,控制设备本体1的表面设有内温度传感器14,第一支撑架4和第二支撑架5的表面均设有外温度传感器15,防护罩8的表面安装有蜂鸣器16,第一支撑架4和第二支撑架5一侧的顶部和底部均设有雷达传感器17;
监控单元包括固定安装于防护罩8表面的单片机处理器9,单片机处理器9的输出端双向电性连接有温度采集模块10,单片机处理器9的输出端双向电性连接有数据对比模块11,单片机处理器9的输出端双向电性连接有预警模块12,单片机处理器9的输出端双向电性连接有控制模块13,单片机处理器9与避障模组33信号连接;
避障模组33包括摄像头、障碍传感器和信息识别模组,摄像头和障碍传感器均通过导线与工业机器人电性连接;
温度采集模块10包括用于采集控制设备本体1不同区域温度情况的设备温度采集模组1001和用于采集当前环境温度的环境温度采集模组1002,设备温度采集模组1001通过导线与内温度传感器14电性连接,环境温度采集模组1002通过导线与外温度传感器15电性连接;
数据对比模块11包括用于预设控制设备本体1不同温度阀值的预设模组1101和用于对比温度采集模块10实际采集数据和预设模组1101预设数据差值的差值波动模组1102,数据对比模块11通过将采集的控制设备本体1不同区域内的温度与预先设定的不同区域内的稳定性进行对比;
预警模块12包括高温预警模组1201和防碰撞模组1202,雷达传感器17和蜂鸣器16均通过导线与预警模块12电性连接,当差值波动模组1102内的差值波动高于预设模组1101的最大值时,蜂鸣器16启动进行预设,提醒设置维护人员进行及时的查看,若是差值波动模组1102内的差值波动低于预设模组1101的最大值时,则设备运行稳定,不需要进行额外的降温散热,若是温度在预先设定的温度范围内,则设备虽然不会有高温警报,但是还需要进行降温处理,此时单片机9就会给予电机19信号使其启动,调整散热器23的位置进行区域散热;
控制模块13包括时钟调控模组1301、储存模组1302和信号收发模组1303,时钟调控模组1301用于检测不同范围内差值波动模组1102内的波动数据,储存模组1302用于对该监控单元产生的数据进行储存,信号收发模组1303与终端控制室信号连接。
辅助散热机构包括固定连接于壳体3内底壁的底座18,底座18的一侧安装有电机19,电机19的输出端固定连接有螺纹杆20,螺纹杆20的一端通过轴座活动安装于底座18的一侧壁,螺纹杆20的表面螺纹连接有活动座21,活动座21下表面的两侧均通过T型槽与底座18滑动连接,活动座21的内部滑动连接有齿环22,齿环22的表面固定连接有散热器23,齿环22的下表面啮合有齿轮24,齿轮24的表面固定安装有驱动电机,驱动电机安装于活动座21的表面,缓冲调节机构包括固定连接于防护罩8一侧壁的调节电机25,调节电机25的输出端固定连接有双向螺纹杆26,双向螺纹杆26的一端通过轴座与防护罩8的一侧壁活动连接,双向螺纹杆26的两端开设有反向螺纹,双向螺纹杆26的两端均螺纹连接有螺纹环27,双向螺纹杆26的表面靠近螺纹环27滑动连接有活动环28,一组吊绳7的一端分别固定于两个活动环28的下表面,防护罩8的内顶壁固定连接有稳定杆29,螺纹杆27和活动环28均滑动套接于稳定杆29的表面,双向螺纹杆26的表面套接有弹簧30,弹簧30的一端固定连接于螺纹环27的表面,弹簧30的另一端固定连接于活动环28的表面,防护罩8的内部转动安装有导向滚轴31,吊绳7搭接于导向滚轴31的表面,壳体3下表面的四角处均固定连接有滚轮32,防护罩8固定于第一支撑架4和第二支撑架5的表面,缓冲调节机构的数量为两个,两个缓冲调节机构分别设于防护罩8内部的两侧。
本公开具体实施方式省略了已知功能和已知部件的详细说明,为保证设备的兼容性,所采用的操作手段均与市面器械参数保持一致。
综上所述,该一种工业机器人运动控制装置的控制方法如下;
S1)、使调节电机25通电使其输出端正向带动双向螺纹杆26转动,双向螺纹杆26与其两端的螺纹环27形成螺纹配合,使其相互靠近,并通过弹簧30带动滑动环28同步于双向螺纹杆26的表面滑动;
S2)、在步骤S1)中两个螺纹环27相互靠近的过程中,壳体3通过吊绳7的放线向下移动,当滚轮32接触地面时,推动该控制设备本体1移动于合适的位置;
S3)、当步骤S2中移动于合适的位置后,使调节电机25带动双向螺纹杆26反向转动,使两个螺纹环26相互远离,吊绳7通过活动环28的滑动带动壳体3向上移动,完成控制设备本体1的放置;
S4)、在控制设备本体1进行控制工作时,温度采集模块10对周围环境温度和控制设备本体1不同区域内的温度进行检测,将其检测数据与预警模块12进行差值对比;
S5)、差值在安全范围内,单片机处理器9给予电机19信号使其启动,通过螺纹杆20的转动使散热器23移动于高温区域,此时驱动电机启动带动齿轮24转动并与齿环22形成啮合转动,进一步调整散热器23的位置,调整完成后,散热器23工作对高温区域进行散热,若差值不在安全范围内,蜂鸣器16启动提醒工作人员需要进行及时的查看;
S6)、在控制设备本体1进行使用过程中受到震动时,壳体3通过吊绳7带动活动环28于双向螺纹杆26的表面滑动,使得弹簧30产生压缩形变,从而可以对震动进行有效的减缓,有利于控制设备本体1的减震保护;
S7)、控制设备本体1在对工业机器人控制的同时,同步控制其上的摄像头和障碍传感器,对其周围环境进行探测,信息识别模组对其探测的信息进行识别并传送给单片机处理器9,若是无障碍物,控制设备本体1对工业机器人进行正常控制,若存在障碍物,预警模块12发起警报。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内,其中所使用到的标准零件均可以从市场上购买,而且根据说明书和附图的记载均可以进行订制,各个零件的具体连接方式均采用现有技术中成熟的螺栓、铆钉、焊接等常规手段,机械、零件和设备均采用现有技术中常规的型号,且本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知在本说明书的描述中,术语“连接”、“安装”、“固定”、“设置”等均做广义理解,例如,“连接”可以是固定连接或在不影响部件关系与技术效果的基础上通过中间组件间接进行,也可以是一体连接或部分连接,如同此例的情形对于本领域普通技术人员而言,可根据具体情况理解上述术语在本发明或发明中的具体含义。
- 一种工业机器人运动控制装置及其控制方法
- 一种工业机器人运动控制装置