一种用于旋变软解码的标定方法及装置
文献发布时间:2023-06-19 18:29:06
技术领域
本发明属于电机技术领域,具体涉及一种用于旋变软解码的标定方法及装置。
背景技术
由于旋变的软件解码不需要额外的硬件芯片,近两年被越来越广泛的应用于新能源汽车的电驱动产品中,但旋变本体、硬件采样电路存在一致性差异,同时软件处理旋变正余弦的包络面也存在零位零位偏移不准确等问题,都导致了软件最终解包络得到的旋变正余弦信号存在误差:幅值误差、零位偏移、相位误差。这3类误差都会影响软件锁相环的角度输出的线性度,对于永磁同步电机控制而言,会直接降低效率,严重时导致电机失控。因此如何补偿上述误差,进而准确地得到旋变正余弦包络面的幅值、零位、相位差,成为现有技术有待解决的一个技术问题。
发明内容
本发明的目的是提供一种用于旋变软解码的标定方法,用于解决现有技术中软件最终解包络得到的旋变正余弦信号存在误差,无法通过解码准确地得到旋变正余弦包络面的幅值、零位偏移、相位差的技术问题。
所述的一种用于旋变软解码的标定方法,包括:按照N倍过采样频率分别采样旋变反馈的正弦和余弦反馈信号包络面并得到正、余弦过采样信号;对正、余弦过采样信号进行处理得到旋变正、余弦包络信号的零位偏移;对正、余弦过采样信号进行处理得到旋变正、余弦包络面的幅值;对正、余弦过采样信号进行处理得到旋变正、余弦包络面的相位偏差;通过计算得到的幅值、零位偏移、相位偏差对旋变正、余弦的包络面进行补偿,补偿后的信号送入锁相环得到旋变的角度和转速信息。
优选的,具体包括下列步骤:
步骤1、对旋变反馈的正、余弦包络面进行N倍频的过采样;
步骤2、将正、余弦过采样信号分别进行求平均计算,得到正、余弦包络面的零位偏移;
步骤3、对正、余弦过采样信号计算一阶DFT级数的系数,分别得到正、余弦包络面的D轴和Q轴的分量;
步骤4、对得到的正、余弦的D、Q轴分量分别进行求平方和后开根操作,便分别得到正、余弦的幅值;
步骤5、对得到的正、余弦的D、Q轴分量分别进行反正切操作,分别得到正、余弦包络面的在DQ轴系的初始相位;
步骤6、对得到的正、余弦初始相位进行做差,得到正、余弦的相位差;
步骤7、根据标定得到的正、余弦包络面的零位偏移以及正、余弦的幅值对原始的正、余弦包络面进行幅值和零位偏移补偿,得到标幺化的正、余弦;
步骤8、将得到的相位差对步骤7中标幺化的标幺值进行相位补偿,得到正、余弦信号的校正值;
步骤9、将计算得到的矫正值送入锁相环计算旋变的角度和转速。
优选的,所述步骤1中,进行N倍频的过采样并且保持M个完整周期,这样就得到了N*M个正、余弦过采样信号。用X(i)、Y(i)(i=1,2,3…N*M)分别表示正弦和余弦过采样信号。
优选的,所述步骤2中,计算正、余弦包络面的零位偏移Offset
优选的,所述步骤3中,将正、余弦过采样信号分别和同频率的单位离散正、余弦三角函数序列进行点乘操作,然后再乘以2/(M*N),得到了正、余弦包络面的D轴和Q轴的分量Amp
优选的,所述步骤4中,正、余弦的幅值Amp
优选的,所述步骤5中,正、余弦包络面的在DQ轴系的初始相位θ
所述步骤6中,正、余弦的相位差
优选的,所述步骤7中,正、余弦包络面的零位偏移分别为Offset
所述步骤8中,正、余弦信号的校正值Sin
本发明还提供了一种实现上述用于旋变软解码的标定方法的装置,包括拖动模块、采样模块、误差补偿模块和锁相环模块,所述误差补偿模块用于实施上述的用于旋变软解码的标定方法,计算得到待标定旋变的正余弦幅值、零位偏移和相位差,输出矫正后的正余弦信号。
优选的,所述拖动模块用于将待标定的控制器进行固定转速拖动并稳定在标定转速;所述采样模块用于按照N倍采样频率对旋变反馈的正、余弦包络信号进行过采样得到待处理的信号;所述锁相环模块对补偿矫正后的正余弦信号进行锁相计算,得到旋变的角度和转速。
本发明具有以下优点:本发明对过采样得到正弦和余弦过采样信号进行一系列计算处理,先后求得准确的幅值、零位偏移、相位差,进而能根据前述过程计算得到的三种误差对处理后的正弦和余弦信号进行误差补偿,最终得到矫正后的正、余弦信号(即校正值),这样对校正值进行锁相环计算旋变的角度和转速,结果准确,有效保证了电机的效率,克服电机控制因上述三种误差大导致效率降低甚至失控的问题。
附图说明
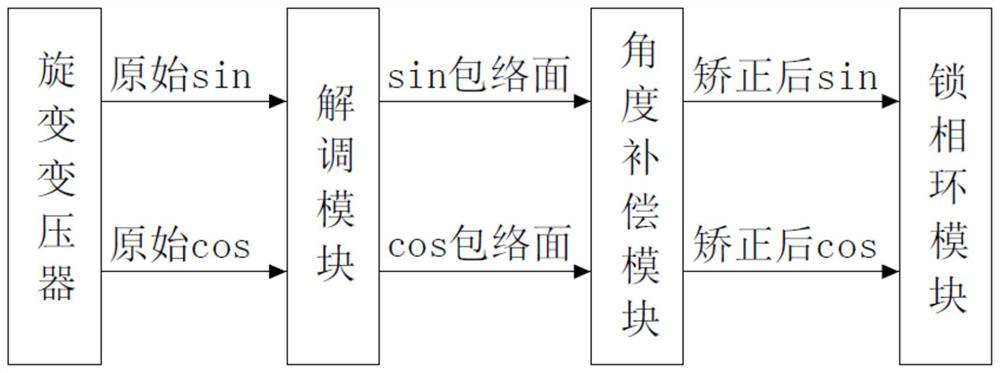
图1为本发明一种实现用于旋变软解码的标定方法的装置的示意图。
图2为图1所示结构中误差补偿模块实现标定方法的流程图。
具体实施方式
下面对照附图,通过对实施例的描述,对本发明具体实施方式作进一步详细的说明,以帮助本领域的技术人员对本发明的发明构思、技术方案有更完整、准确和伸入的理解。
如图1-2所示,本发明提供了一种用于旋变软解码的标定方法,包括以下步骤:按照N倍过采样频率分别采样旋变反馈的正弦和余弦反馈信号包络面并得到正、余弦过采样信号;对正、余弦过采样信号进行处理得到旋变正、余弦包络信号的零位偏移(即偏置);对正、余弦过采样信号进行处理得到旋变正、余弦包络面的幅值;对正、余弦过采样信号进行处理得到旋变正、余弦包络面的相位偏差;通过计算得到的幅值、零位偏移、相位偏差对旋变正、余弦的包络面进行补偿,补偿后的信号送入锁相环得到旋变的角度和转速信息。
具体来说,上述内容包括下列步骤。
步骤1、对旋变反馈的正、余弦包络面进行N倍频的过采样,并且保持M个完整周期,这样就得到了N*M个正、余弦过采样信号。用X(i)、Y(i)(i=1,2,3…N*M)分别表示正弦和余弦过采样信号。
步骤2、将正、余弦过采样信号分别进行求平均计算,便得到了正、余弦包络面的零位偏移Offset
步骤3、将正、余弦过采样信号分别和同频率的单位离散正、余弦三角函数序列进行点乘操作,然后再乘以2/(M*N),其实这里本质是计算了一阶DFT级数的系数。这样分别得到了正、余弦包络面的D轴和Q轴的分量Amp
步骤4、对步骤3中得到的正、余弦的D、Q轴分量分别进行求平方和后开根操作,便分别得到了正、余弦的幅值Amp
步骤5、对步骤3中得到的正、余弦的D、Q轴分量分别进行反正切操作,便分别得到了正、余弦包络面的在DQ轴系的初始相位θ
步骤6、对步骤5中计算得到的正、余弦初始相位进行做差,便得到了正、余弦的相位差
步骤7、根据标定得到的正、余弦包络面的零位偏移Offset
步骤8、将步骤5中得到的相位差对步骤7中标幺化的标幺值进行相位补偿,得到正、余弦信号的校正值Sin
步骤9、将步骤8中计算得到的矫正值Sin
为实现上述标定方法,本发明还提供了一种实现上述标定方法的装置,包括:拖动模块、采样模块、误差补偿模块和锁相环模块。各模块具体功能如下。
拖动模块,用于将待标定的控制器进行固定转速拖动并稳定在标定转速,如1000RPM。
采样模块,用于按照N倍采样频率对旋变反馈的正、余弦包络信号进行过采样得到待处理的信号。
误差补偿模块,用于实施上述的用于旋变软解码的标定方法,计算得到待标定旋变的正余弦幅值、零位偏移和相位差,输出矫正后的正余弦信号。
锁相环模块,对补偿矫正后的正余弦信号进行锁相计算,得到旋变的角度和转速。
上述结构的核心的误差补偿模块,改模块通过执行本发明提供的标定方法实现对旋变正余弦信号的误差补偿,包括对幅值误差、零位偏移、相位误差三种误差的补偿,从而输出矫正后的正余弦信号供所述锁相环模块进行锁相计算,由此得到的旋变角度和转速正确可靠,克服了现有技术采用旋变软解码因误差导致降低效率甚至电机失控的问题。
上面结合附图对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的发明构思和技术方案进行的各种非实质性的改进,或未经改进将本发明构思和技术方案直接应用于其它场合的,均在本发明保护范围之内。
- 一种旋变标定装置及标定方法
- 一种永磁同步电机旋变零位标定系统及标定方法
- 一种用于多旋翼无人机的自主导航避障方法及装置
- 一种用于旋变软解码的激磁信号发生方法
- 一种基于DSADC的旋变软解码处理方法及其装置