一种基于人工智能的自动消毒机器人
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及人工智能设备技术领域,具体涉及一种基于人工智能的自动消毒机器人。
背景技术
公共场所人员密集且流动性大,为病毒的传播提供了良好的环境,尤其是医院、车站、机场等大型公共场所,若环境不能彻底消毒,将给社会带来巨大的安全隐患。
目前,公共场所的室内消毒一般由人工喷洒消毒液的方式进行消毒杀菌,不仅费时费力,工作效率低,且很容易因为人为因素造成消毒盲区及死角,难以保持彻底的消毒效果。现有的消毒机器人,一般不能攀爬楼梯,导致消毒机器人只能在无障碍的平层楼层之间移动消毒,不同楼层需要配备不同的消毒机器人进行消毒,成本高,且消毒机器人的利用率低;消毒方式单一、消毒效果不理想,不能适应多变的消毒环境,消毒效率低下。
发明内容
针对现有技术中的缺陷,本发明提供一种基于人工智能的自动消毒机器人,包括:
移动机构,所述移动机构包括底盘和安装在所述底盘上的移动组件,所述移动组件包括能够攀爬楼梯的移动模块和用于驱动所述移动模块移动的动力模块;
消毒机构,安装在所述底盘上表面上,所述消毒机构包括底座和通过升降组件可升降地设置在所述底座内的升降头,所述底座内和升降头内设置有连通的喷雾消毒系统,所述底座外壁和升降头外壁上均设置有紫外线消毒灯;
控制系统,所述控制系统包括控制器、无线网络模块、摄像头和多个激光雷达传感器,所述无线网络模块、摄像头和激光雷达传感器均与所述控制器电信号连接;所述摄像头和激光雷达传感器均设置在所述底座外壳表面,所述控制器封装在所述底座外壳上;
所述动力模块、升降组件、喷雾消毒系统和紫外线消毒灯均与所述控制器电信号连接。
进一步,所述移动模块呈正三角形状,包括两块相对设置、呈正三角形状的支撑板,三个转动连接在两块所述支撑板三个角之间的第一同步轮以及位于两块所述支撑板之间中心位置设置的第二同步轮;
所述第一同步轮之间套设有橡胶履带,所述第二同步轮与其中一个所述第一同步轮通过同步带连接,所述第二同步轮与所述动力模块传动连接;
其中一块所述支撑板的中心位置转动连接在所述动力模块上。
进一步,所述动力模块包括轮轴、齿轮组和第一电机;其中,
所述齿轮组通过齿轮箱安装在所述底盘内;
所述轮轴横穿在所述底盘与所述齿轮箱内,所述轮轴通过轴承与所述底盘和齿轮箱转动连接;
所述第一电机固定安装在所述底盘内,所述第一电机通过所述齿轮组驱动所述轮轴转动;
所述第二同步轮固定套设在所述轮轴的端部;
其中一块所述支撑板的中心位置通过轴承座转动连接在所述轮轴上,所述轴承座套设在所述轮轴上,所述支撑板通过螺钉固定连接在所述轴承座上;
所述第一电机与所述控制器电信号连接。
进一步,所述底座呈圆柱状,所述底座中部具有安装所述升降头的安装孔,所述底座内具有装载消毒溶液的空腔;
所述升降组件和升降头均安装在所述安装孔内。
进一步,所述升降组件包括第二电机和丝杠,所述丝杠的一端通过轴承转动安装在固定板上,所述第二电机驱动所述丝杠转动,所述第二电机固定连接在所述固定板底部;
所述固定板固定安装在所述安装孔底部,所述升降头套设在所述丝杠上,所述升降头通过丝杆滑块与所述丝杠连接;
所述第二电机与所述控制器电信号连接。
进一步,所述喷雾消毒系统包括第一喷雾消毒子系统和第二喷雾消毒子系统;其中,
所述第一喷雾消毒子系统包括第一微型泵和多个设置在所述升降头顶部的第一雾化喷嘴,所述第一微型泵设置在所述空腔内,所述第一雾化喷嘴通过第一管路与所述第一微型泵连通;
所述第二喷雾消毒子系统包括第二微型泵和多个设置在所述升降头顶部的第二雾化喷嘴,所述第二微型泵设置在所述空腔内,所述第二雾化喷嘴通过第二管路与所述第二微型泵连通;
所述第一微型泵和第二微型泵均与所述控制器电信号连接。
进一步,所述底座外壁和升降头外壁上均设置有纵向延伸的安装槽,所述紫外线消毒灯均设置在所述安装槽内。
进一步,所述底座外壁的安装槽内设置有防护件,所述防护件包括弧形的防护板和位于所述防护板两端设置有的端板,所述端板上设置有连接轴,所述连接轴转动安装在所述安装槽内;
其中一根所述连接轴通过第三电机驱动,所述第三电机与所述控制器电信号连接;
所述紫外线消毒灯固定安装在两块所述端板之间。
进一步,所述升降头顶部设置有闪光灯,所述闪光灯与所述控制器电信号连接。
进一步,所述控制器为工控机。
本发明的有益效果体现在:
本发明提供的自动消毒机器人,其移动机构具有能够攀爬楼梯的移动模块,从而使该自动消毒机器人能够自动攀爬楼梯,在不同的楼层之间进行移动,完成对不同楼层的自动消毒作业,有效提高了消毒机器人的利用率,降低了机器人的使用成本。
消毒机构具有包括底座和通过升降组件可升降地设置在底座内的升降头,在攀爬楼梯的过程中,升降头缩回到底座内部,降低整个消毒机构的重心,避免消毒机器人在攀爬楼梯的过程中发生倾倒或侧翻。在消毒过程中,消毒机器人采用SLAM导航技术,融合视觉和自然导航避障,能适应多变的环境,自动规划移动路径,实现自主绕障、自主移动。
消毒升降头正常伸出后,能够对空间从上到下进行消毒,并具有喷雾消毒和紫外线消毒两种消毒方式可供选择,消毒方式更加丰富全面,有效提升了消毒效果。
附图说明
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
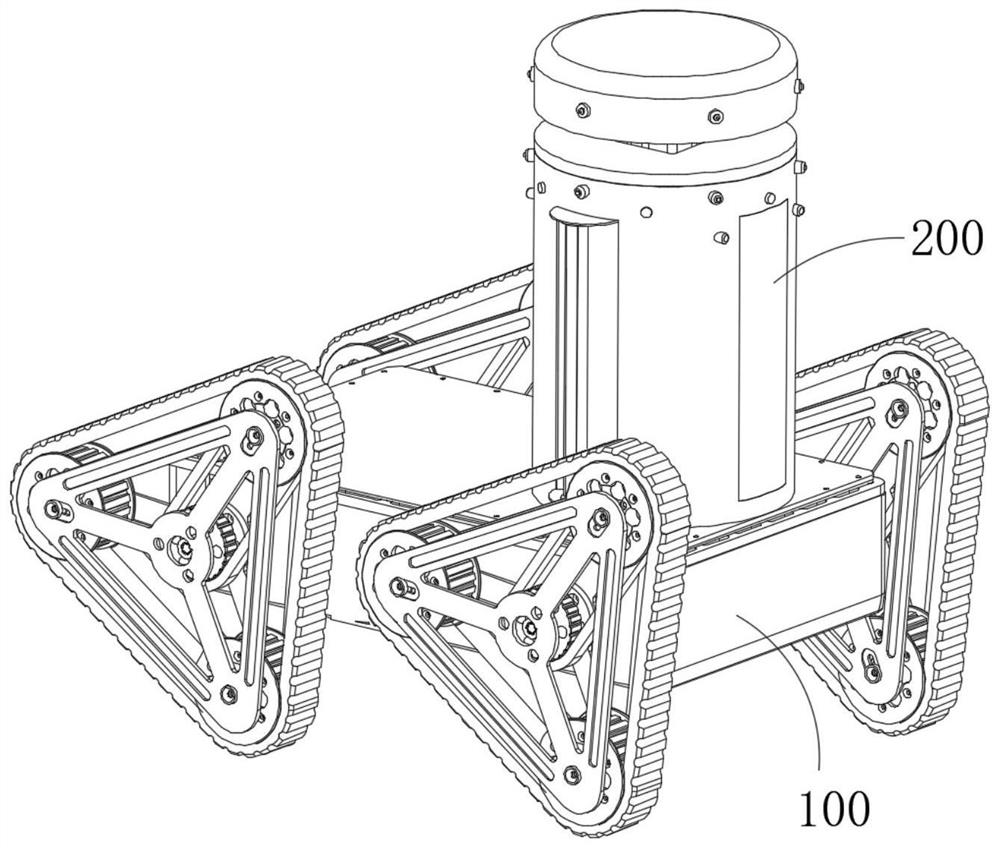
图1为本实施例提供的一种基于人工智能的自动消毒机器人的结构示意图;
图2为本实施例提供的移动机构的结构示意图一;
图3为本实施例提供的移动机构的结构示意图二;
图4为本实施例提供的移动组件的结构示意图一;
图5为本实施例提供的移动组件的结构示意图二;
图6为本实施例提供的消毒机构的结构示意图;
图7为本实施例提供的底座的内部结构示意图;
图8为本实施例提供的升降头的结构示意图;
图9为本实施例提供的防护件的结构示意图。
具体实施方式
下面将结合附图对本发明技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本发明的技术方案,因此只作为示例,而不能以此来限制本发明的保护范围。
需要注意的是,除非另有说明,本申请使用的技术术语或者科学术语应当为本发明所属领域技术人员所理解的通常意义。
如图1所示,本实施例提供的一种基于人工智能的自动消毒机器人,包括移动机构100、安装在移动机构100上的消毒机构200以及控制系统。
如图2和图3所示,移动机构100包括底盘101和安装在底盘101上的移动组件,移动组件包括能够攀爬楼梯的移动模块102和用于驱动移动模块102移动的动力模块。
具体的,如图4和图5所示,移动模块102呈正三角形状,包括两块相对设置、呈正三角形状的支撑板103,三个通过转轴转动连接在两块支撑板103三个角之间的第一同步轮104以及位于两块支撑板103之间中心位置设置的第二同步轮105。第一同步轮104之间套设有橡胶履带106,橡胶履带106与地面接触,第二同步轮105与其中一个第一同步轮104通过同步带107连接,第二同步轮105与动力模块传动连接。其中一块支撑板103的中心位置转动连接在动力模块上。
动力模块包括轮轴108、齿轮组109和第一电机110。其中,齿轮组109通过齿轮箱111安装在底盘101内,齿轮箱111通过螺栓固定安装在底盘101内。轮轴108横穿在底盘101与齿轮箱111内,轮轴108通过轴承与底盘101和齿轮箱111转动连接。第一电机110固定安装在底盘101内,第一电机110通过齿轮组109驱动轮轴108转动。第二同步轮105固定套设在轮轴108的端部。其中一块支撑板103的中心位置通过轴承座112转动连接在轮轴108上,轴承座112套设在轮轴108上,支撑板103通过螺钉固定连接在轴承座112上。
第一电机110通过齿轮组109驱动轮轴108转动,从而带动第二同步轮105转动,第二同步轮105通过同步带107带动第一同步轮104转动,从而带动橡胶履带106转动,从而使整个移动机构100移动起来。攀爬楼梯时,当移动模块102在移动过程中收到阶梯阻挡时,整个移动模块102会绕轴承座112转动,从而使移动模块102向上翻转,攀爬上楼梯,橡胶履带106可以使移动机构100在相邻的多个阶梯之间稳定移动,从而攀爬楼梯;同理,橡胶履带106也可以使移动机构100稳定地下楼梯,从而使本自动消毒机器人能够自动在不同楼层之间移动消毒。
如图3所示,为保持在楼梯上运行时的稳定性,在底盘101内设置有用于供电的蓄电池,并能通过蓄电池调整整个底盘101的配重和重心分布,避免在楼梯上运行时重心不稳发生倾倒或侧翻。
消毒机构200安装在底盘101的上表面上,如图6所示,消毒机构200包括底座201和通过升降组件可升降地设置在底座201内的升降头202,底座201和升降头202均可以采用硬质塑料材质制作。底座201内和升降头202内设置有连通的喷雾消毒系统,底座201外壁和升降头202外壁上均设置有紫外线消毒灯203。
具体的,如图7所示,底座201呈圆柱状,底座201中部具有安装升降头202的安装孔,底座201内具有装载消毒溶液的空腔204。升降组件和升降头202均安装在安装孔内。
如图8所示,升降组件包括第二电机205和丝杠206,丝杠206的一端通过轴承转动安装在固定板207上,第二电机205驱动丝杠206转动,第二电机205固定连接在固定板207底部。固定板207通过螺钉固定安装在安装孔底部的凸台上。
升降头202套设在丝杠206上,升降头202通过丝杆滑块208与丝杠206连接,第二电机205驱动丝杠206转动,丝杠206转动时通过丝杆滑块208带动升降头202上升或者下降,从而使升降头202伸出或者收缩到底座201内。在攀爬楼梯时,将升降头202收缩到底座201内,整个消毒机构200的重心降低,避免自动消毒机器人发生倾倒或者侧翻。
喷雾消毒系统包括第一喷雾消毒子系统和第二喷雾消毒子系统。其中,第一喷雾消毒子系统包括第一微型泵209和多个设置在升降头202顶部的第一雾化喷嘴210,第一微型泵209设置在空腔204内,第一雾化喷嘴210通过第一管路与第一微型泵209连通。
第二喷雾消毒子系统包括第二微型泵211和多个设置在升降头202顶部的第二雾化喷嘴212,第二微型泵211设置在空腔204内,第二雾化喷嘴212通过第二管路与第二微型泵211连通。
当需要进行喷雾消毒时,启动第一微型泵209和第二微型泵211,将消毒液通过管路泵入第一雾化喷嘴210和第二雾化喷嘴212中,消毒液通过第一雾化喷嘴210和第二雾化喷嘴212雾化后喷出到空气中,对空气进行消毒。
底座201外壁和升降头202外壁上均设置有纵向延伸的安装槽213,紫外线消毒灯203均设置在安装槽213内。
如图6所示,为对底座201外壁上的紫外线消毒灯203进行防护,在底座201外壁的安装槽213内设置有防护件214。如图9所示,防护件214包括弧形的防护板215和位于防护板215两端设置有的端板216,端板216上设置有连接轴217,连接轴217转动安装在安装槽213内。其中一根连接轴217通过第三电机218驱动,第三电机218与控制器电信号连接。紫外线消毒灯203固定安装在两块端板216之间,非工作状态时,第三电机218驱动连接轴217转动,使防护板215处于闭合状态,对紫外线消毒灯203形成防护;消毒状态时,第三电机218驱动连接轴217反向转动,使防护板215处于打开状态。
进一步,如图6所示,升降头202顶部设置有闪光灯219,闪光灯219能够发出不同颜色的灯光用于提醒行人注意,并能显示不同的工作状态。
控制系统包括控制器、无线网络模块、摄像头301和多个激光雷达传感器302,无线网络模块、摄像头301和激光雷达传感器302均与控制器电信号连接。摄像头301和激光雷达传感器302均设置在底座201外壳表面,控制器封装在底座201外壳上。
摄像头301可以采用深度摄像头,深度摄像头用于实时采集自动消毒机器人前后方向的环境信息以自主导航及避障。多个激光雷达传感器302分布在底座201外壳表面四周,用于探测周围环境中障碍物的距离和移动速度,避免消毒机器人撞到障碍物。
第一电机110、第二电机205、第三电机218、紫外线消毒灯203、第一微型泵209和第二微型泵211均与控制器电信号连接。控制器可以采用工控机,工控机内运行有控制程序,通过摄像头301和激光雷达传感器302采集的数据自动控制第一电机110、第二电机205、第三电机218、紫外线消毒灯203、第一微型泵209、第二微型泵211和闪光灯219。
为便于准确控制,第一电机110、第二电机205和第三电机218均可以采用伺服减速电机。无线网络模块可以采用4G模块、5G模块或者WiFi模块,用于连接网路信号,与云端服务器进行网络通信,接收控制室下发的消毒指令,并及时反馈运行数据。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
- 一种基于人工智能消毒机器人的消毒装置
- 一种基于人工智能的消毒喷雾机器人