一种适用于大型豪华邮轮的模块化舱室转运设备
文献发布时间:2023-06-19 19:18:24
技术领域
本发明涉及船舶设备技术领域,具体为一种适用于大型豪华邮轮的模块化舱室转运设备。
背景技术
大型邮轮建造复杂,内部结构紧凑,在实际工作的时候,在面对邮轮每层甲板的建造过程中,对于舱室模块的转移是一个难题,因为邮轮每层甲板内空间小,结构复杂,不易转移,而且邮轮内部多属于薄板结构,舱室模块搬运的时候容易发生碰撞,引发安全事故,传统的人工撬棍搬运不仅会浪费大量的人力物力,还会妨碍实际的作业,应对这样的特殊情况就需要设计一种邮轮舱室模块转运装置。
在部分现有技术中,舱室模块移运大多使用撬棍、液压车辆进行配合移运,因此,采用传统的转运工具以及移运的方案极容易导致模块化舱室的产生形变或者损坏、造成不必要的成本支出,同时容易损坏船舶甲板表面;
此外,现有的液压车辆在移动过程中,常用自制小车移运大型舱室、但是车体在推舱过程中需要人力推动,安全性差,且舱室模块在移运时或者异常受力后易造成偏移,甚至脱离小车掉落,因此如何能够可靠的对舱室的多个部位进行可靠连接固定,同时提供降低对邮轮内部的擦伤损坏状况,是舱室转运过程中的急需解决的重要问题。
发明内容
本发明针对上述现有技术存在的问题,提供一种适用于大型豪华邮轮的模块化舱室转运设备,解决传统需要人工使用撬棍搬运会浪费大量人力物力,采用传统的转运工具以及移运的方案极容易导致模块化舱室的产生形变或者损坏、造成不必要的成本支出,且舱室模块在移运时可能发生脱离或者受创的问题。
本发明的目的是通过以下技术方案来实现的:一种适用于大型豪华邮轮的模块化舱室转运设备,包括N个转运车体和P根拉杆,N≥4,P≥4;所述转运车体包括卡接动力装置、卡接组件、驱动力组件,所述卡接动力装置的上下两端分别设有卡接组件,卡接动力装置使上下两端的卡接组件相向运动或背向运动,上下两端的卡接组件夹持舱室;所述驱动力组件设置于卡接动力装置的下端,用于驱动转运车体移动;N个所述转运车体组合使用时,相邻的转运车体之间通过拉杆连接。
优选的,所述转运车体上设有监测单元、中央控制单元和警示设备,监测单元、中央控制单元和警示设备电连接;所述监测单元包括红外发射器、红外接收器、红外线测距仪和摄像头,所述红外发射器与红外接收器安装的位置一一对应,所述红外线测距仪和摄像头设置于驱动力组件;所述中央控制单元与卡接动力装置和驱动力组件连接,控制卡接动力装置和驱动力组件工作。
其中一个转运车体上安装一个红外发射器,与这个相邻的转运车体上与这个红外发射器对应位置安装一个红外接收器,使得红外发射器发出信号被红外接收器接收到;红外发射器发出的红外光到达对面的红外接收器,在设备转运前,通过红外光的发射以及接收状态能够合理的感知全部转运车体的位置是否处于可靠位置,在转运过程中,在舱室异常受力或者产生形变后,或者舱室将要与周围物体发生接触时,红外发射器发出红外光均不能被红外接收器所接收,如红外接收器不能接收红外光,则表示当前转运状态不可靠,通过中央控制单元控制警示设备进行报警。自驱轮上的红外线测距仪和摄像头实时观察移运方向上是否有障碍物并检测出障碍物的距离,对处于移动过程中的舱室状态以及周围物体位置进行检测,当监测单元对处于转运过程中舱室状态检测出异常情况后,通过中央控制单元控制动力组件停止行进,同时通过警示设备发出警报信号,本装置应用在模块化舱室的转运,能够更好的对舱室状态进行实施监测,有效避免舱室以及邮轮中物体的擦伤情况,使得整体舱室转运过程更可靠,转运更便捷。技术方案中警示设备为现有技术,本领域技术人员可以根据需要进行常规选择,在此不做过多的描述,警示设备在图中未示出,其具体的安装位置只要清楚可见即可,警示设备可以为声光报警器或者报警灯。
优选的,所述卡接动力装置包括固定块、驱动电机、对拉丝杆、套接快、移动块、滑道、连接块;所述固定块的内部为空腔结构;所述驱动电机安装在固定块的顶端,所述对拉丝杆设置于固定块的内腔中,驱动电机的驱动端连接对拉丝杆的一端,对拉丝杆能够沿其轴线在固定块的内腔中旋转;所述套接块的外壁固定安装在固定块的内腔中,且套接块的内壁通过轴承转动套接在对拉丝杆的中部;所述移动块内设有内螺纹,移动块通过内螺纹分别设置于对拉丝杆的上下两端,所述滑道设置于上下两端移动块之间,移动块能够沿滑道直线方向移动;所述连接块设置于移动块远离对拉丝杆的一端,卡接组件通过连接块连接卡接动力装置。
优选的,所述固定块呈“L”型,所述驱动电机安装在固定块的顶端弯折部位;所述驱动电机的驱动端与对拉丝杆的一端设有联轴器。
其中当驱动电机启动后,将带动对拉丝杆进行旋转,对拉丝杆为两端螺纹相反的结构,或是本领域人员已知的正反牙丝杠结构,处于旋转过程中的对拉丝杆将两端的移动块相向或背向移动,滑道保证上下两端的移动块沿直线运动,由于移动块、连接块和卡接组件连接在异地,在此运动过程中,位于固定块上下两端的卡接组件也相向或背向移动,从而上下两端的卡接组件卡接在舱室的卡接位置,完成车体与舱室的固定过程。上下两端的移动块逐渐靠近时,套接快可以防止上下两端的移动块相碰。
优选的,所述卡接组件包括连接杆、支撑块、夹持板、固定座;所述连接杆的一端穿过固定座并连接卡接动力装置,连接杆滑动设置于固定座内,连接杆的另一端连接支撑块,支撑块的内侧设置夹持板;所述固定座设置于卡接动力装置的内侧,所述固定座的端部设有限位条,限位条与支撑块的侧壁滑动连接。
优选的,所述夹持板包括一个水平抵接板、两个纵向抵接板,两个纵向抵接板垂直连接并设置于水平抵接板的底部,水平抵接板和纵向抵接板的内壁均设有软性靠垫;所述固定座的内侧设有托板。
夹持板呈“L”型结构,一个水平抵接板、两个纵向抵接板分别舱室角部的三个外壁进行充分接触,能够对舱室的全部角部位置进行可靠卡接,软性靠垫以及托板对舱室固定位置进行防护,防止固定过程或转运过程对舱室造成形变或损坏。另外,在软性靠垫内壁或夹持板的外壁上安置压力传感器,压力传感器与监测单元相连接,压力传感器的设置能够测得当先舱室与工具接触位置的接触效果,在转运过程中,可造成舱室受力不均的位置很多,因此,通过对舱室与工具之间的接触状态的受力数据获取,可判定其转运车体与舱室之间的受力程度,从而避免车体本身结构因素造成对舱室的破坏,当压力超过中央控制单元中阀值的压力阀值时,中央控制单元控制警示设备进行报警。
优选的,所述驱动力组件包括支撑杆、动力组件、自驱轮;所述动力组件包括蓄电池、转向装置和动力装置;所述动力组件通过支撑杆连接卡接动力装置,动力组件使自驱轮转动;所述自驱轮设置于动力组件的底端,所述蓄电池与转动装置和动力装置电连接,所述转动装置和动力装置均与自驱轮连接。在接通电源后,自驱轮能够自行旋转移动,以实现带动整体木块化舱室的自动转运效果。
优选的,所述驱动力组件的底部设有万向轮。万向轮可安装与自驱轮的两侧一方面可以保证转运过程中的平稳,另一方面,当断电后可以通过人员抓住抓手进行推动。
优选的,所述卡接动力装置的外侧设有抓手。
优选的,所述拉杆为伸缩杆,所述拉杆的伸缩节之间设有旋钮,所述拉杆的两端分别设有挂钩,所述卡接组件的侧边设有转轴,拉杆通过挂钩卡接在转轴上。在转运车体组合使用的时候,拉杆的两端分别通过挂钩活动连接在两个相邻的转运车体的卡接组件的转轴上,收纳时,可将拉杆活动连接在同一个转运车体的上下两个卡接组件的转轴上。
本发明具有以下有益效果:(1)本发明提供的适用于大型豪华邮轮的模块化舱室转运设备,卡接动力装置与卡接组件相连接,卡接动力装置用于控制卡接组件对舱室的八个角部进行可靠夹持,再用拉杆连接舱室八个角的卡接组件,使转运车体与舱室完全固定,整体固定过程简单便捷,卡接后的舱室受到多个卡接组件对舱室的全部角部进行包裹防护并形成可靠的卡接结构,可应对在移动中的工作人员的在多角度下施加的推力,防止舱室异常受力造成的偏移以及脱落,在舱室的转运过程中,与转运工具的契合程度更好,移动过程中的路径更易掌控;同时软性靠垫以及托板可以防止舱室在卡接过程中或是转运过程中的变形,也可以避免在转运过程中角部对操作人员的擦伤。
(2)本发明提供的适用于大型豪华邮轮的模块化舱室转运设备,中央控制单元用于接收来自于控制者的控制指令,中央控制单元可控制卡接动力装置是卡接组件夹持舱室,也可驱动动力装置和转向装置进行转运车体的移动,当四个转运车体均与舱室处于固定安装状态后,通过驱动力组件的动力支持,可降低工作人员在对舱室移动过程中付出的体力,使得整体转运过程更加轻松,转运难度更小。另外本发明的卡接动力装置外设有抓手,当断电后,操作人员可以暂时抓住抓手通过万向轮进行转运。
(3)本发明中监测单元和中央控制单元均位于转运车体上,其中监测单元能够对转运车体的安装位置进行校验,在移动前可得知全部转运车体是否处于可靠的转契合位置,由于舱室在移动的过程中可能会因地势、施力不均或与邮轮中其他物体、门体和墙体发生擦伤的状况。监测单元除对移动前的车体位置进行校验以外,自驱轮上的红外线测距仪和摄像头可以实时观察移运方向上是否有障碍物并侧出与障碍物的距离,对处于移动过程中的舱体状态以及周围物体位置进行检测,当监测单元对处于转运过程中的舱室状态检测出异常情况后,通过中央控制单元控制动力组件停止行进,同时通过警示设备发生警报信号,因此,本装置应用在模块化舱室的转运,能够更好的对舱室状态进行实施监测,有效避免模块化舱室受损情况,使得整体舱室转运过程更可靠,转运更便捷。
(4)本发明中压力传感器的设置能够测得当前舱室与工具接触位置的接触效果,在转运过程中,可造成舱室受力不均的位置很多,因此,在本示例中,通过对舱室与工具之间的接触状态的受力数据获取,可判定其转运车体与舱室之间的受力程度,从而避免车体本身因复杂因素造成对舱室的破坏,当压力超过中央控制单元中阈值的压力阈值时,中央控制单元控制警示设备进行报警。
(5)本发明整体固定过程简单、使用方便,解决了现有的液压车辆在移动过程中,常用自制小车移运大型舱室、但是车体在送仓过程中需要人力推动,安全性差,且舱室模块在移运时或者异常受力后易造成偏移,甚至脱离小车掉落的问题;解决现有舱室模块转运过程中造成舱室表面变形,或损坏船舶甲板表面的问题。
附图说明
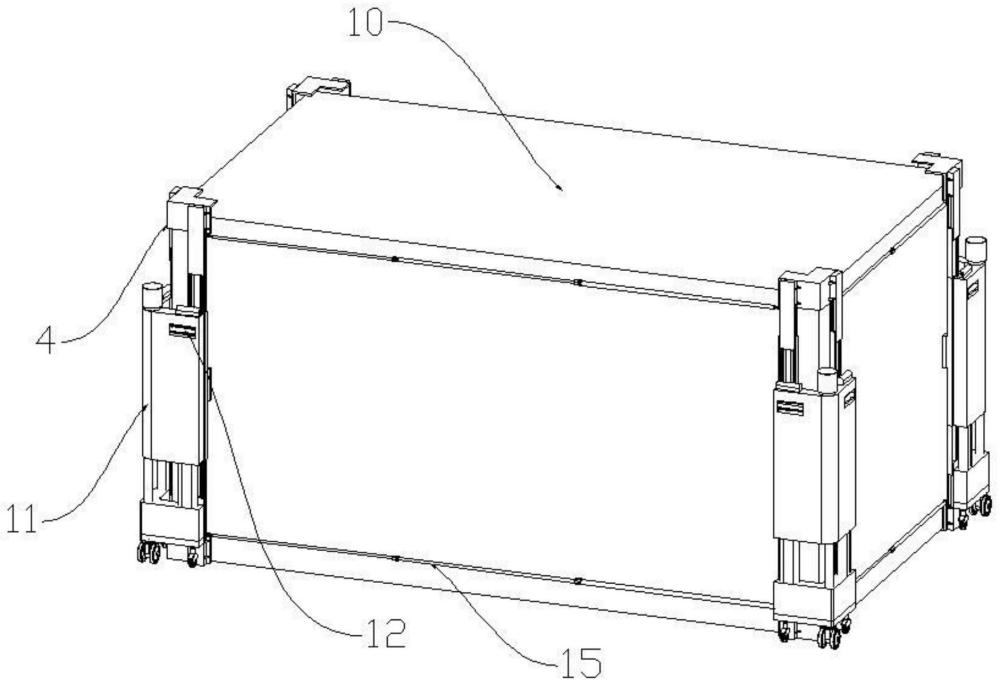
图1为本发明实施例提供的适用于大型豪华邮轮的模块化舱室转运设备与舱室的组合状态的结构示意图;
图2为本发明实施例提供的转运车体和拉杆组合的结构示意图;
图3为本发明实施例提供的单个转运车体的结构示意图;
图4为本发明实施例提供的卡接动力装置和驱动力组件的结构示意图;
图5为本发明实施例提供的适用于大型豪华邮轮的模块化舱室转运设备的结构框图;
图6为图2中的A处放大图;
图7为图3中的B处放大图;
图8为本发明实施例提供的挂钩与转轴的放大结构示意图;
图9为本发明实施例提供的抓手放大结构示意图。
图中: 1、固定块,2、固定座,3、限位条,4、卡接组件,41、连接杆,42、支撑块,43、夹持板,44、软性靠垫,45转轴,5、托板,6、支撑杆,7、动力组件,71、蓄电池,72、转向装置,73、动力装置,8、自驱轮,81、红外线测距仪,82、摄像头,9、万向轮,10、舱室,11、卡接动力装置,111、驱动电机,112、对拉丝杆,113、套接块,114、移动块,115、滑道,116、连接块,12、抓手,13、红外发射器,14、红外接收器,15、拉杆,16、旋钮,17、挂钩。
具体实施方式
下面结合实施例对本发明作进一步的说明,但并不作为对本发明限制的依据。
本领域技术人员应明白,本申请的实施例可提供为方法、系统或计算机程序产品。因此,本申请可采用完全硬件实施例、完全软件实施例或结合软件和硬件方面的实施例的形式。而且,本申请可采用在一个或多个其中包含有计算机可用程序代码的计算机可用计算机可读存储介质(包括但不限于磁盘存储器、CD ROM、光学存储器等)上实施的计算机程序产品的形式。
如图1-7所示,一种适用于大型豪华邮轮的模块化舱室转运设备,包括4个转运车体和8根拉杆15,每个所述转运车体包括卡接动力装置11、卡接组件4、驱动力组件;卡接动力装置11的上下两端分别设有卡接组件4,卡接动力装置11使上下两端的卡接组件4相向运动或背向运动,上下两端的卡接组件4夹持舱室10;驱动力组件设置于卡接动力装置11的下端,用于驱动转运车体移动;4个所述转运车体组合使用时,相邻的转运车体之间通过拉杆15连接。
转运车体上设有监测单元、中央控制单元和警示设备,监测单元、中央控制单元和警示设备电连接;监测单元包括红外发射器13、红外接收器14、红外线测距仪81和摄像头82,红外发射器13与红外接收器14安装的位置一一对应,当其中一个转运车体的固定块的外壁上安装一个红外发射器时,与之相邻的另外一个转运车体上的固定块的外壁上安装一个红外接收器与红外接收器相对应,保证在没有障碍物的情况下,红外发射器发射的信号能被红外接收器接收到,红外线测距仪81和摄像头82设置于驱动力组件的自驱轮8的中间轴上;中央控制单元用于接收来自控制这的控制指令,中央控制单元与卡接动力装置11和驱动力组件连接,控制卡接动力装置11和驱动力组件工作,当4个转运车体均与舱室10处于固定安装状态后,通过动力组件的动力支持,可降低工作人员对舱室移动过程中付出的体力,使得整体转运过程更加轻松,转运难度更小。
卡接动力装置11包括固定块1、驱动电机111、对拉丝杆112、套接快113、移动块114、滑道115、连接块116;固定块1呈“L”型,弯折状,固定块1的内两侧壁均安装有固定座2,卡接动力装置11的固定块1的外侧上设有多个内嵌式的抓手12,固定块1的外壁上开设槽口,槽口内安装圆柱形成抓手结构;固定块1的内部为空腔结构;
驱动电机111安装在固定块1的顶端弯折部位,对拉丝杆112设置于固定块1的内腔中,驱动电机111的驱动端通过联轴器与对拉丝杆112的一端锁紧,对拉丝杆112能够沿其轴线在固定块1的内腔中旋转;
套接块113的外壁固定安装在固定块1的内腔中,且套接块2的内壁通过轴承转动套接在对拉丝杆112的中部;
移动块114的形状与固定块1相匹配,且移动块114设置于固定块1的内腔中,移动块114内设有内螺纹,移动块114通过内螺纹分别设置于对拉丝杆112的上下两端,所述滑道115设置于上下两端移动块之间,移动块114能够沿滑道115直线方向移动;
连接块116设置于移动块114远离对拉丝杆112的一端,卡接组件4的连接杆41通过连接块116连接卡接动力装置11。
卡接组件4包括连接杆41、支撑块42、夹持板43、固定座2;
连接杆41的一端穿过固定座2并连接卡接动力装置11的连接块116,连接杆41滑动设置于固定座2内,连接杆41的另一端连接支撑块42,支撑块42的内侧设置夹持板43;
固定座2设置于卡接动力装置11的内侧,固定座2的端部设有限位条3,限位条3与支撑块42的侧壁滑动连接;支撑块42的两侧壁分别设有滑槽,限位条3沿其长度方向设有凸块,凸块滑动卡接在滑槽内,限位条可以保证上下两端的卡接组件沿垂直方向相向运动;
夹持板43与舱室角部的三个外壁相接触;夹持板43包括一个水平抵接板、两个纵向抵接板,两个纵向抵接板垂直连接并设置于水平抵接板的底部,水平抵接板和纵向抵接板的内壁均设有软性靠垫44;固定座2的内侧设有托板5,托板5与舱室10的四角中部位置相接触;软性靠垫的内壁中或夹持板的外壁上安置有压力传感器,压力传感器与监测单元相连接;压力传感器的设置能够测得当前舱室与工具接触位置的接触效果,在转运过程中,可造成舱室受力不均的位置很多,因此,在本示例中,通过对舱室与工具之间的接触状态的受力数据获取,可判定其转运车体与舱室之间的受力程度,从而避免转运车本身结构造成对舱室的破坏,当压力超过中央控制单元中阈值的压力阈值时,中央控制单元控制警示设备进行报警。
上端的卡接组件的夹持板的两侧底端和下端卡接组件的夹持板的两侧顶端分别设有转轴45。
驱动力组件包括支撑杆6、动力组件7、自驱轮8;所述动力组件7包括蓄电池71、转向装置72和动力装置73;自驱轮8安置在动力组件7底端的拐角处;
动力组件7通过支撑杆6连接卡接动力装置11的固定块1的底端,动力组件7使自驱轮8转动;蓄电池71与转动装置72和动力装置73电连接,转动装置72和动力装置73均与自驱轮8连接;
驱动力组件的动力组件两侧的底部分别设有万向轮9。技术方案中转动装置和动力装置属于现有技术,本领域技术人员可以根据需要进行常规选择,在此不做过多的赘述。
拉杆15为伸缩杆,分为两种长度,均可收缩调节,长拉杆分为三节,短拉杆分为两节,拉杆15的伸缩节之间设有旋钮16,通过松紧旋钮16来调节长度并固定;拉杆15的两端分别设有挂钩17,卡接组件4的侧边设有转轴45,拉杆15通过挂钩17卡接在转轴45上。4个转运车体组合使用时,拉杆15两端分别通过挂钩17活动连接在两个相邻的转运车的卡接组件4的转轴45上;收纳时,可将拉杆15活动连接在同一个转运车体的上下两个卡接组件4的转轴45上。
工作原理:当需要对舱室进行固定时,将其中一个转运车体安装在舱室的一个角上,控制者发出控制指令给中央控制单元,中央控住组件控制卡接动力装置的驱动电机111工作,当驱动电机111启动后,将带动对拉丝杆112进行旋转,在此运动过程中,处于旋转过程中的对拉丝杆112将上下两端的移动块沿滑道115进行相向移动,由于移动块114与连接块116固定连接,连接块116与卡接组件4的连接杆41固定连接,从而位于固定块1上下两端的两个卡接组件4也逐渐靠近,直至卡接组件卡入到舱室10的卡接位置后,完成转运车体与舱室的固定;另外三个角也采用相同的步骤进行固定;
完成固定后,卡接组件4的夹持板43对舱室10的角部部位进行卡接以及防护,其中夹持板43中一个水平抵接板、两个纵向抵接板分别对舱室10角部的三个外壁进行充分接触;托板5与舱室10的四角中部位置相接触;通过如上方案的设置能够对舱室10的全部角部位置进行可靠卡接,再配合拉杆15连接舱室八个角的卡接组件,将转运车体和舱室10完全固定,保证了舱室在转运过程中的安全性,软性靠垫对舱室中部进行支撑,进一步防止舱室在转运过程中发生的形变;
当4个转运车体均与舱室处于固定安装状态后,中央控制单元控制动力组件工作,转向装置72和动力装置73与自驱轮8连接,在接通电源后,自驱轮能够自行旋转移动;
监测单元和中央控制单元均位于转运车体上,其中监测单元能够对转运车体的安装位置进行校验,在移动前可得知全部车体是否处于可靠的转契合位置,由于舱室在移动的过程中可能会因地势、施力不均或与邮轮中其他物体、门体和墙体碰撞发生擦伤的状况,因此监测单元除对移动前的转运车体位置进行校验以外,自驱轮8上的红外线测距仪81和摄像头82可以实时观察移运方向上是否有障碍物并侧出与障碍物的距离,对处于移动过程中的舱体10状态以及周围物体位置进行检测,当检测单元对处于转运过程中的舱室状态检测出异常情况后,通过中央控制单元控制动力组件停止行进,同时通过警示设备发生警报信号,因此,本装置应用在模块化舱室的转运,能够更好的对舱室状态进行实施监测,有效避免舱室以及邮轮中物体的擦伤情况,使得整体舱室转运过程更可靠,转运更便捷。
红外发射器13可发出红外光到达对面的红外接收器14中,在设备转运前,通过红外光的发射以及接收状态能够合理的感知全部转运车体的位置是否处于可靠位置,在转运过程中,在舱体10异常受力或者产生形变后,或者舱室将要与周围物体发生接触时,红外发射器13发出的红外光均不能被红外接收器14所接收,如红外接收器14不能接受到红外光,则表示当前转运状态不可靠,通过中央控制单元控制警示设备进行报警。
压力传感器的设置能够测得当前舱室与工具接触位置的接触效果,在转运过程中,可造成舱室受力不均的位置很多,因此,在本示例中,通过对舱室与工具之间的接触状态的受力数据获取,可判定其转运车体与舱室之间的受力程度,从而避免车体本身因复杂因素造成对舱室的破坏,当压力超过中央控制单元中阈值的压力阈值时,中央控制单元控制警示设备进行报警。
以上显示和描述了本发明的基本原理、主要特征及优点。但是以上所述仅为本发明的具体实施例,本发明的技术特征并不局限于此,任何本领域的技术人员在不脱离本发明的技术方案下得出的其他实施方式均应涵盖在本发明的专利范围之中。
- 一种用于豪华邮轮舱室单元的装配及吊装平台
- 一种用于豪华邮轮舱室单元的装配及吊装平台