港口助泊作业拖船动力测试系统
文献发布时间:2023-06-19 19:23:34
技术领域
本发明涉及船舶与海洋装备测试的技术领域,尤其是港口助泊作业拖船动力测试系统。
背景技术
目前对港口船舶进行助泊作业时一般采用拖船(
发明内容
本发明的目的是为了解决上述技术的不足而设计的一种港口助泊作业拖船动力测试系统,具体方式及结构如下。
本发明所设计的港口助泊作业拖船动力测试系统,包括:
可造波流的水池,用于容纳测试使用的水;
至少一个船舶,其位于水池水面,船舶上设置有系缆柱;
动力测试系统,其包括位于水池水面的至少两个拖船、驱动拖船呈X轴方向和Y轴方向平移的驱动装置以及测力计;驱动装置安装于水池上方,各拖船上均设置有缆绳自动收放器和至少一个压力传感器,测力计固定于缆绳自动收放器上的缆绳末端,缆绳自动收放器上的缆绳末端测力计连接于系缆柱上,至少一个压力传感器位于拖船上朝向船舶的一侧,各拖船分别安装于驱动装置上;
控制器,驱动装置、测力计、压力传感器和缆绳自动收放器分别与控制器相连并受其控制;
其中,
当拖船靠近船舶时,驱动装置驱动拖船朝船舶方向推进,并且缆绳自动收放器驱动缆绳自动收放,以控制船舶位姿发生第一次改变,而在缆绳保持紧绷状态下测力计得到拖船的拖拉力数据,并传输至控制器;
当拖船被推进至与船舶碰撞时,船舶位姿发生第二次改变,且拖船上的压力传感器与船舶的侧面抵触而得到碰撞时的压力数据,并传输至控制器;
当拖船持续运动过程中与船舶抵触,以顶推船舶持续运动而将船舶顶推至水池边侧过程中,船舶位姿发生第三次改变,压力传感器感应各拖船与船舶之间顶推力数据,测力计感应拖船利用缆绳进行拖拉船舶的拖拉力数据,并将拖拉力数据和顶推力数据传输至控制器;
当拖船拖航船舶时,船舶位姿发生第四次改变,测力计感应拖船利用缆绳进行拖拉船舶的拖拉力数据,并将拖拉力数据和顶推力数据传输至控制器。
根据以上所述的港口助泊作业拖船动力测试系统,在船舶上安装位姿传感器,水池侧方安装摄像机,以将船舶在位姿改变过程中的运动轨迹进行记录,并传输至控制器。
根据以上所述的港口助泊作业拖船动力测试系统,驱动装置包括X轴位移驱动机构、以及至少两个Y轴位移驱动机构,各Y轴位移驱动机构均安装于X轴位移驱动机构的移动部上,各拖船分别安装于至少两个Y轴位移驱动机构的移动部上。
根据以上所述的港口助泊作业拖船动力测试系统,各拖船的中部均安装有两个相互间隔设置的轴承座,两个轴承座分别位于拖船上的X轴线两端,各Y轴位移驱动机构的移动部上均安装有丄形杆,丄形杆的横向部两端分别安装于两个轴承座的轴承上。
根据以上所述的港口助泊作业拖船动力测试系统,拖船的侧面安装有多个第一弹性护舷,多个第一弹性护舷中的至少一个第一弹性护舷上安装压力传感器。
根据以上所述的港口助泊作业拖船动力测试系统,船舶的侧面安装有多个第二弹性护舷。
根据以上所述的港口助泊作业拖船动力测试系统,X轴位移驱动机构包括两个第一位移架和两根第一丝杆,两个第一位移架分别安装于水池上的相对两侧部,各第一丝杆分别旋转式安装于两个第一位移架上,各Y轴位移驱动机构分别与第一丝杆上的至少两个第一滑块连接,各第一丝杆的一端分别安装有驱动第一丝杆旋转的第一驱动器,第一驱动器包括第一电机或手摇把,第一丝杆上的至少两个第一滑块上设有导向块,且各导向块分别安装于第一位移架的长形导向槽。
根据以上所述的港口助泊作业拖船动力测试系统,至少两个Y轴位移驱动机构均包括第二位移架和第二丝杆,各第二位移架分别与第一丝杆上的至少两个第一滑块连接,第二丝杆旋转式安装于第二位移架上,各第二丝杆的一端分别安装有驱动第二丝杆旋转的第二驱动器,第二驱动器包括第二电机,各丄形杆的纵向部分别贯穿至少两个第二位移架的长形导向孔后与至少两个第二丝杆的的第二滑块连接。
根据以上所述的港口助泊作业拖船动力测试系统,测力计采用环形测力计,且环形测力计套接于船舶的系缆柱上;压力传感器为薄膜压力传感器。
根据以上所述的港口助泊作业拖船动力测试系统,至少两个Y轴位移驱动机构上的滑块均固定有固定套,且丄形杆的纵向部插入于固定套内,并通过连接件使固定套与丄形杆的纵向部固定相连接,并且丄形杆相对于固定套始终作伸缩运动。
本发明所设计的港口助泊作业拖船动力测试系统,其有益效果如下:
利用驱动装置分别驱动多个拖船独立运动,以模拟多个拖船不同的运动工作状态,同时,拖船上的缆绳通过测力计连接于船舶上进行测试拖船的拉力,以及利用拖船与船舶抵触,并通过其两者之间的压力传感器而测得相互碰撞的撞击力和抵触顶推时的顶推力,从而实现对拖驳过程的真实模拟,在保证真实模拟的状况下满足现有港口作业的拖船研发阶段中的测试需求。
附图说明
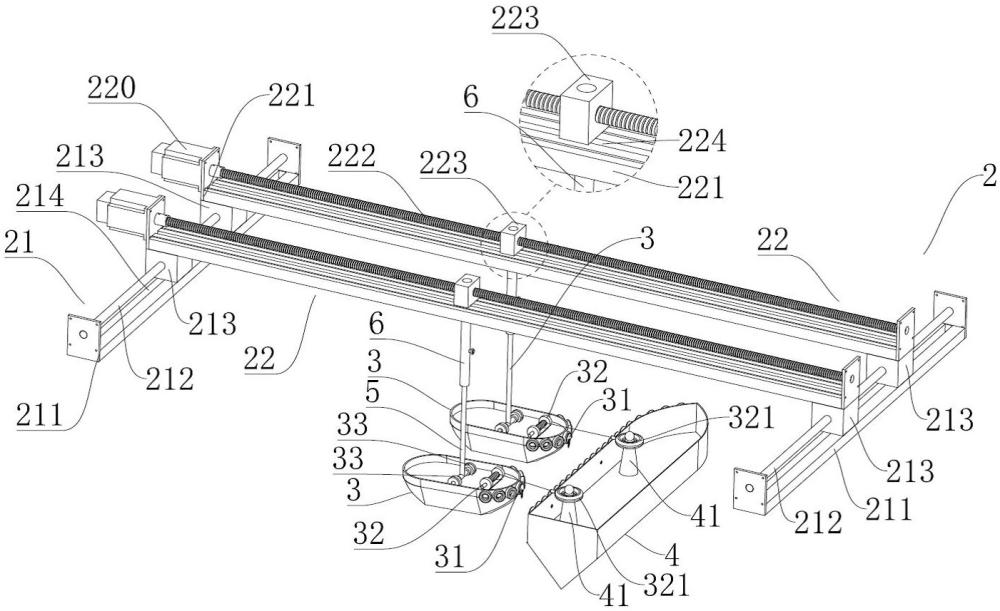
图1是驱动装置、拖船和船舶结合的结构示意图(一);
图2是拖船的结构示意图;
图3是驱动装置、拖船和船舶结合的结构示意图(二);
图4是船舶的结构示意图;
图5是水池、驱动装置、拖船和船舶结合的结构示意图(一);
图6是水池、驱动装置、拖船和船舶结合的结构示意图(二)。
实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-图6,本实施例所描述的港口助泊作业拖船动力测试系统,包括水池1、动力测试系统、控制器、以及位于水池1水面的至少一个船舶4,水池具有特定的水位,该水位可根据测试场景对应的真实海况环境进行调整,水池最左端可安装波浪、海流生成装置,模拟海洋中的波流环境,控制器可采用PLC控制器,水池1的内腔中容纳有测试使用的水,船舶4上设置有系缆柱41;动力测试系统包括位于水池1水面的至少两个拖船3、驱动拖船3呈X轴方向和Y轴方向平移的驱动装置2以及测力计321,驱动装置2安装于水池1上方,各拖船3上均设置有缆绳自动收放器32和至少一个压力传感器31,缆绳自动收放器32采用缆绳绞车具备缆绳收放辊轴,测力计321固定于缆绳自动收放器32上的缆绳末端,缆绳自动收放器32上的缆绳末端测力计321连接于系缆柱41上,至少一个压力传感器31位于拖船3上朝向船舶4的一侧,各拖船3分别安装于驱动装置2上;驱动装置2、测力计321、压力传感器31和缆绳自动收放器32分别与控制器相连并受其控制,缆绳的选取上,根据实际拖船3环境下的绳子选择弹性模量和强度需要都相似的包括但不局限于细的尼龙绳;其中,一般压力传感器31设置为一个,并安装于拖船3的船头外壁,即拖船3的船头朝向船舶4,上述中设置可根据实际比例缩放而得到,从而在相应比例条件下模拟测试实际拖船3的情况,并且测力计321采用环形测力计321,且环形测力计321套接于船舶4的系缆柱41上;压力传感器31为薄膜压力传感器,薄膜压力传感器采用柔性应力片,缆绳自动收放器32放在拖船3船头位置处,以便于拖船3的拖拉工作。
当拖船3靠近船舶4时,驱动装置2驱动拖船3朝船舶4方向推进,并且缆绳自动收放器32驱动缆绳自动收放,以控制船舶4位姿发生第一次改变(船舶4减速、转向或者后退的过程),而在缆绳保持紧绷状态下测力计321得到拖船3的拖拉力数据,并传输至控制器,一般在船舶4拖拽转动或靠近速度过快时拖拉力的数据被检测得到;当拖船3被推进至与船舶4碰撞时,船舶4位姿发生第二次改变(船舶4加速、转向的过程),且拖船3上的压力传感器31与船舶4的侧面抵触而得到碰撞时的压力数据,并传输至控制器;当拖船3持续运动过程中与船舶4抵触,以顶推船舶4持续运动而将船舶4顶推至水池1边侧过程中,船舶4位姿发生第三次改变(船舶4匀速的过程),压力传感器31感应各拖船3与船舶4之间顶推力数据,测力计321感应拖船3利用缆绳进行拖拉船舶4的拖拉力数据,并将拖拉力数据和顶推力数据传输至控制器,而且在顶推的过程中拖船3与被作船舶4距离始终保持不变,二者之间的缆绳长度保持不变,但拖轮的推拉力还会不断转化,通过系系缆柱41上的环形测力计321,记录下此状态下的拖轮拖拉力状态,从而后期根据拖拉力数据和顶推力数据进行分析实验结果;当拖船3拖航船舶4时,船舶4位姿发生第四次改变(船舶4减速的过程),测力计321感应拖船3利用缆绳进行拖拉船舶4的拖拉力数据,并将拖拉力数据和顶推力数据传输至控制器。优选地,所测得的数据通过控制器传输至电脑中进行分析。
其中,上述中可以是仅一个拖船3工作或两个拖船3同时工作,并可对拖船3工作动力状态在全功率、半功率、小功率三者之间转换,且会进行间歇运动;所以在实现拖船3的模拟运动时,我们也可以通过对电机功率的大小,间歇,实现拖驳过程的真实模拟。
基于上述,可实现两种拖力测试模式,模式一为助泊拖曳模式,此模式缆绳长度通过绞车自动调节,以满足拖轮与被作船舶4距离变化时缆绳始终处于绷紧状态,尤其是满足拖轮顶推和拖曳两种运动方式变换时缆绳受力状态的变化需求,保证缆绳能快速张紧提供拖拽力。
模式二为长航时拖航模式,此模式拖轮拖着被作船舶4做单向长航程拖航,此时缆绳长度固定,拖力固定,二者不会频繁变化,此模式下反向测量被作船舶4拖航的运动状态。
为了记录船舶4运动轨迹,所以在船舶4上安装位姿传感器,水池1侧方安装摄像机,以将船舶4在位姿改变过程中的运动轨迹进行记录,同时,可记录船舶靠泊过程中,拖轮运动轨迹、拖轮与船舶周围水面起伏变化状态及船舶与码头的实时距离变化,并传输至控制器。当被作船舶4在拖船3靠近,到拖船3与被作船舶4碰撞,到顶推靠岸的三个过程都有着比较明显的位姿变化,可以通过摆放位姿传感器,记录下被作船舶4的轨迹,分析处理数据,找到其普遍规律;并通过摄像机进行摄像记录,进行视觉分析,与位姿传感器结果进行相互验证,从而得到更为准确的测试数据。
本实施例中,驱动装置2包括X轴位移驱动机构21、以及至少两个Y轴位移驱动机构22,各Y轴位移驱动机构22均安装于X轴位移驱动机构21的移动部上,各拖船3分别安装于至少两个Y轴位移驱动机构22的移动部上,X轴位移驱动机构21驱动控制至少两个Y轴位移驱动机构22在X轴上作平移运动,两个Y轴位移驱动机构22分别驱动对应位置处的拖船3作平移运动,从而实现拖船3靠近船舶4或远离船舶4,进一步实现助泊作业的测试。
本实施例中,各拖船3的中部均安装有两个相互间隔设置的轴承座33,两个轴承座33分别位于拖船3中部的X轴线两端,各Y轴位移驱动机构22的移动部上均安装有丄形杆5,丄形杆5的横向部两端分别安装于两个轴承座33的轴承上,由丄形杆5与轴承座33相配合,拖船3在波浪的影响下能随着丄形杆5转动,并约束拖船3沿纵向拖航或顶推或波浪方向相对驱动装置2运动,约束拖船3横向相对驱动装置2运动,可更真实的模拟测试环境下拖船3的运动状态。
本实施例中,拖船3的侧面安装有多个第一弹性护舷34,多个第一弹性护舷34中的至少一个第一弹性护舷34上安装压力传感器31,船舶4的侧面安装有多个第二弹性护舷42;第一弹性护舷34数量和第二弹性护舷42可以根据实际情况进行设定,拖船3上第一弹性护舷34设置在船头外壁,船舶4上的第二弹性护舷42一般设置船体中部旁侧面,第一弹性护舷34和第二弹性护舷42一般由橡胶材质制成,护舷的设置为保护船体,避免硬性撞击而发生船体损坏。
本实施例中,X轴位移驱动机构21包括两个第一位移架211和两根第一丝杆212,两个第一位移架211分别安装于水池1上的相对两侧部,各第一丝杆212分别旋转式安装于两个第一位移架211上,各Y轴位移驱动机构22分别与第一丝杆212上的至少两个第一滑块213连接,各第一丝杆212的一端分别安装有驱动第一丝杆212旋转的第一驱动器,第一驱动器包括第一电机或手摇把,第一丝杆212上的至少两个第一滑块213上设有导向块,且各导向块分别安装于第一位移架211的长形导向槽214,优选地,第一驱动器采用电机,电机可以是伺服电机或步进电机,伺服电机或步进电机与控制器相连并受其控制,从而根据控制器的程序设定来实现在不同模式下进行驱动各Y轴位移驱动机构22在X轴上运动。
本实施例中,至少两个Y轴位移驱动机构22均包括第二位移架221和第二丝杆222,各第二位移架221分别与第一丝杆212上的至少两个第一滑块213连接,第二丝杆222旋转式安装于第二位移架221上,各第二丝杆222的一端分别安装有驱动第二丝杆222旋转的第二驱动器,第二驱动器包括第二电机,各丄形杆5的纵向部分别贯穿至少两个第二位移架221的长形导向孔224后与至少两个第二丝杆222的第二滑块223连接;优选地,第二驱动器采用电机220,电机可采用伺服电机或步进电机,伺服电机或步进电机与控制器相连并受其控制,从而根据控制器的程序设定来实现在不同模式下进行驱动各拖船3在Y轴上运动,并与X轴位移运动配合来达到不同模式的助泊测试。
例如,在单拖船3工作时,此时Y轴只有一个电机处于工作状态,通过电机的正反转实现拖船3的推、拉的工作状态,从而实现船舶4的位姿调整及助泊作用;当双拖船3工作时,Y轴上双电机都开始工作,通过电机分别的正反转,实现双拖轮同时推,同时拉,一拖一拉,一拉一拖四种工作状态,从而实现船舶4的位姿调整及助泊作用;其中电机旋转而驱动丝杠旋转,进一步达到丝杆上的滑块作平移运动,从而驱动相应的装置进行平移。
优选地,至少两个Y轴位移驱动机构22上的滑块均固定有固定套6,且丄形杆5的纵向部插入于固定套6内,并通过连接件使固定套6与丄形杆5的纵向部相嵌套连接,并且通过固定套6内部安装的滚珠轴承,丄形杆5相对于固定套6始终作伸缩运动,拖轮可沿着垂直水面方向浮动,丄形杆5与轴承座33相配合,拖船3在波浪的影响下能随着丄形杆5转动,从而使拖船3模型可两个自由度上运动,固定套6和丄形杆5为塑料材质制成,一般为PVC材质,使得防锈质量轻。
本实施例实现了从拖船3靠近被作船舶4到顶推被作船舶4靠岸的全过程,拖船3都能真实模拟,并且记录下拖轮的拖、拉力状态和数值,以进行全面的测试分析,得到更为准确的测试结果。当然,上述中的船舶4也可以是其他的海上设备平台,例如浮标、养殖网箱等等。
本发明不局限于上述最佳实施方式,任何人在本发明的启示下都可得出其他各种形式的产品,但不论在其形状或结构上作任何变化,凡是具有与本申请相同或相近似的技术方案,均将落在本发明的保护范围之内。
- 面向海上拖航作业的无人拖船集群协同作业系统和方法
- 一种兼港口破冰作业的全回转拖船
- 一种港口靠泊装置及可调节的港口智能靠泊装置