一种锥齿型立体仓储机器人举升换向机构
文献发布时间:2023-06-19 19:38:38
技术领域
本发明涉及立体仓储机器人技术领域,具体涉及一种锥齿型立体仓储机器人举升换向机构。
背景技术
立体仓储机器人在货架上搬运物品时,需要在不同的货架区域之间来回运行,不断往返运动以搬运物品。当立体仓储机器人从子轨货架区域运行至母轨货架区域时,需要将立体仓储机器人的轮子从子轨切换至母轨上。为了实现立体仓储机器人的轨道切换,现在立体仓储机器人配置有提升机构以便于完成切换动作。
现在的提升机构多为连杆机构、滑台机构或液压机构。连杆机构的结构过于复杂,过于复杂结构使得其安装精度降低,进一步导致传动过程的可靠性低。滑台机构的滑动摩擦力大,在传动过程中零件易磨损。为了确保滑台机构的稳定运行,需要对滑台机构的零件进行充分润滑,使得维护成本增大。液压机构采用液压油传递动力,液压传动系统对液压元件的密封性提出了很高的要求。液压机构在反复的运动过程中液压元件一旦出现磨损,液压油容易从磨损处泄露,造成液压传动结构失效,泄露的液压油会污染产品。
连杆机构、滑台机构或液压机构都不是稳定可靠的提升机构,不能使立体仓储机器人稳定的完成取货、卸货以及在子轨和母轨之间的可靠切换。
发明内容
本发明的目的在于提供锥齿型立体仓储机器人举升换向机构,其提升机构性能稳定,使得立体仓储机器人稳定的完成取货、卸货以及在子轨和母轨之间的切换。
为达到本发明之目的,采用如下技术方案:
一种锥齿型立体仓储机器人举升换向机构,包括电机,所述电机输出的动力通过减速机传递至主传动轴,所述主传动轴的两端分别通过齿轮驱动第一传动轴和第二传动轴,还包括:
提升连杆,两个所述提升连杆分别平行的布置在第一传动轴和第二传动轴的相背的一侧,并且和相对应的第一传动轴或第二传动轴通过齿轮啮合配合;在所述提升连杆的两端配置有母轨轮;以及
第一凸轮组件和第二凸轮组件,以旋转轴和主传动轴平行的方向可转动的安装在同一个所述提升连杆上;
所述电机驱动第一传动轴和第二传动轴时,由第一传动轴或第二传动轴带动安装在同一个所述提升连杆上的第一凸轮组件和第二凸轮组件同时分别向着相反的方向转动,以使得相连接的所述提升连杆被调整至上位以向上顶起托盘,或被调整至中位以放下托盘,或被调整至下位以便于立体仓储机器人从子轨切换至母轨上。
通过上述技术方案,本申请中,电机的动力通过主传动轴分别传递至在两端通过齿轮组啮合配合的第一传动轴和第二传动轴,第一传动轴和第二传动轴分别通过齿轮带动和对应的一个提升连杆上的第一凸轮组件、第二凸轮组件转动,随着第一凸轮组件和第二凸轮组件的转动带动提升连杆在纵向上移动,将提升连杆移动至相应的纵向位置,以满足立体仓储机器人在不同使用场景下的工作需要。
例如,电机通过主传动轴、第一传动轴、第二传动轴以及端部的齿轮组将提升连杆调整至上位,提升连杆将处于上方的提升板向上顶起至托盘的底部,并将托盘顶起来以搬取货物。
当立体仓储机器人运行至目标位置时,电机通过主传动轴、第一传动轴、第二传动轴以及端部的齿轮组带动提升连杆向下移动至中位,随着提升连杆的下降,提升板逐渐下降并将托盘放下。
本例中子轨和母轨垂直,且子轨处于母轨的上方。当立体仓储机器人沿着子轨运行至子轨和母轨的交叉处,电机通过主传动轴、第一传动轴、第二传动轴以及端部的齿轮组将提升连杆调整至下位,此时,母轨轮和向下触及在母轨上,子轨轮随着立体仓储机器人的被顶起处于悬空状态,以完成立体仓储机器人从子轨向母轨的切换。
子轨和母轨垂直,对应的在立体仓储机器人,子轨轮的排列方向和母轨轮的排列方向垂直,即子轨和子轨轮的排布方向匹配,母轨和母轨轮的排布方向匹配,便于立体仓储机器人准确的完成从子轨至母轨的切换。
在上述搬取货物、放下托盘、从子轨至母轨的切换等过程中,从电机至提升连杆之间的动力传递完全依靠主传动轴、第一传动轴、第二传动轴以及端部的齿轮组完成,即全采用机械结构传递动力,没有采用液压、或者链条等柔性传动,提高动力传递的稳定性。
在至少一个实施方式中,在所述第一凸轮组件和所述第二凸轮组件的两个端部均固定有齿轮;
所述第一传动轴的两端通过齿轮驱动对应的一个所述提升连杆上的所述第一凸轮组件和所述第二凸轮组件同时反向转动;所述第二传动轴的两端通过齿轮驱动另一个所述提升连杆上的所述第一凸轮组件和所述第二凸轮组件同时反向转动,以带动相应的提升连杆在纵向移动至目标位置。
通过上述技术方案,本申请中,第一传动轴两端都分别布置一个齿轮,例如锥齿轮,第二传动轴的两端都分别布置一个齿轮,例如锥齿轮。在主传动轴的驱动下第一传动轴、第二传动轴转动并带动通过齿轮相啮合的第一凸轮组件和第二凸轮组件转动。设置在同一个所述提升连杆的两端附加的第一凸轮组件和第二凸轮组件转动旋转方向相反,即当第一凸轮组件顺时针转动的同时第二凸轮组件逆时针转动或者第一凸轮组件逆时针转动的同时第二凸轮组件顺时针转动。例如,第一凸轮组件和第二凸轮组件分别转动,并最终处于向下的方向时将提升连杆向上顶起至上位。
在至少一个实施方式中,所述子轨和所述母轨垂直;在所述立体仓储机器人的和所述提升连杆相垂直的两端分别布置有两排子轨轮,用于引导立体仓储机器人在所述子轨上行走。
通过上述技术方案,本申请中,子轨处于母轨的上方,且子轨的长度方向和母轨的长度方向垂直。在立体仓储机器人的主体上,多个子轨轮的排列方向和提升连杆的长度方向垂直,即和处于同一个提升连杆上的的两个母轨轮的排列方向垂直。子轨、母轨的布置方向和子轨轮、母轨轮的布置方向匹配,利于立体仓储机器人从子轨切换至母轨上运行。
在至少一个实施方式中,所述电机顺时针转动时驱动第一传动轴和第二传动轴正向转动,分别带动所述第一凸轮组件和所述第二凸轮组件转动,所述提升连杆被调整至上位,将子轨上方的托盘顶起。
通过上述技术方案,当立体仓储机器人沿着子轨移动至承载有货物的托盘的下方时,电机驱动通过主传动轴、第一传动轴、第二传动轴以及齿轮组驱动第一凸轮组件和所述第二凸轮组件转动,两个第一凸轮组件和所述第二凸轮组件分别同时向相反方向转动,并将提升连杆向上顶起至上位。提升连杆将提升板向上顶起,提升板将上方的托盘顶起,以搬取物品。通过纯粹的硬性的机械结构的配合传递动力,稳定可靠。
在至少一个实施方式中,所述电机逆时针转动时分别驱动所述第一传动轴和所述第二传动轴转动,相应的带动所述第一凸轮组件和所述第二凸轮组件转动,所述提升连杆被向下调整至中位,将托盘放下。
通过上述技术方案,当立体仓储机器人将货物运输至目标位置之后,电机驱动通过主传动轴、第一传动轴、第二传动轴以及齿轮组驱动第一凸轮组件和所述第二凸轮组件转动,提升连杆从上位被向下调整至中位,该过程中电机的转动方向和提升连杆上升过程中电机的转动方向相反。提升连杆下降使得托盘下降,将放置在托盘内的物品放下。
在至少一个实施方式中,当所述立体仓储机器人运行至子轨和母轨的交叉位置处时,所述电机逆时针转动驱动第一传动轴和第二传动轴转动,带动所述第一凸轮组件和所述第二凸轮组件转动,所述提升连杆被向下调整至下位且带动所述母轨轮向下抵触至母轨上,将所述立体仓储机器人顶起使得所述子轨轮悬空,实现从子轨向母轨的切换。
通过上述技术方案,在子轨和母轨的交叉位置处,提升连杆被向下移动至下位,带动母轨向下移动并触及在母轨上,在母轨将立体仓储机器人的主体部分向上顶起,相应的子轨轮随着立体仓储机器人的主体部分翘起处于悬空状态,仅仅只有母轨和母轨轮接触,实现从子轨至母轨的切换。
在至少一个实施方式中,当所述立体仓储机器人空载时,所述电机驱动所述第一凸轮组件和所述第二凸轮组件转动90度,以将所述提升连杆从中位切换至下位,完成所述立体仓储机器人从子轨到母轨的换向。
通过上述技术方案,当立体仓储机器人空载状态时,提升连杆处于中位。在从子轨向母轨切换的过程中,电机驱动所述第一凸轮组件和所述第二凸轮组件转动90度即可带动提升连杆从中位切换至下位,完成立体仓储机器人从子轨至母轨的切换。
在至少一个实施方式中,当所述立体仓储机器人满载时,所述电机驱动所述第一凸轮组件和所述第二凸轮组件转动180度,以将所述提升连杆从上位切换至下位,完成所述立体仓储机器人从子轨到母轨的换向。
通过上述技术方案,在立体仓储机器人搬取货物时提升连杆处于上位,在获取到货物之后提升连杆保持上位的位置。立体仓储机器人沿着子轨运行至和母轨垂直交叉的位置。在所述立体仓储机器人满载状态时,在从子轨向母轨切换的过程中,电机驱动所述第一凸轮组件和所述第二凸轮组件转动180度,以带动提升连杆从上位切换至下位,完成立体仓储机器人从子轨至母轨的切换。
在至少一个实施方式中,在所述第一凸轮的和所述连接杆错开的一端的和背离所述第二凸轮的一侧面设置有输入段;所述输入段和所述第一传动轴或所述第二传动轴的输出端通过齿轮啮合;所述输入段上连接有两组圆柱齿轮,其中一组所述圆柱齿轮和第一凸轮组件啮合并将动力传递至所述第一凸轮组件,另一组所述和第二凸轮组件啮合并将动力传递至所述第二凸轮组件。
通过上述技术方案,电机输出的动力传输至输入段,输入段转动并带动第一凸轮转动,第一凸轮通过连接杆带动第二凸轮同步转动。连接杆安装在提升连杆内,当输入段驱动第一凸轮、第二凸轮、连接杆转动时,连接杆以输入段为转轴,以连接杆至输入段的距离为半径转动,此过程中连接杆的纵向位置逐渐改变,连接杆可转动的穿设在提升连杆内,相应的提升连杆的纵向位置随之改变,从而实现对提升连杆的纵向位置的调整,以将提升连杆调整至上位、中位或下位。
在至少一个实施方式中,所述第一凸轮组件和所述第二凸轮组件的结构一致;所述第一凸轮组件包括第一凸轮和第二凸轮,所述第一凸轮和所述第二凸轮的形状一致,并且在垂直于两者相对的侧面的方向上对齐;
在所述第一凸轮和所述第二凸轮的相对应的一端之间垂直的安装有连接杆;所述连接杆可转动的穿设在所述提升连杆内,所述第一凸轮和所述第二凸轮分别布置在所述提升连杆的两侧。
通过上述技术方案,在对提升连杆的纵向位置进行调整的过程中,第一凸轮和第二凸轮分别处于提升连杆的两侧,提升连杆被夹在中间,通过第一凸轮和第二凸轮对提升连杆的位置进行限定,以提高提升连杆的纵向位置的稳定性。
与现有技术相比,本发明具有如下有益效果:
(1)本申请中,所述电机依次通过减速机、主传动轴、第一传动轴和第二传动轴分别驱动两个所述提升连杆上的第一凸轮组件和第二凸轮组件转动。随着第一凸轮组件和第二凸轮组件的转动,相应的所述提升连杆在纵向上位置被调整。
当所述提升连杆被向上调整至上位是,所述提升连杆会向上顶起提升板,并提升板将托盘顶起,完成取货。当将物品搬运至子轨上的目标位置时,所述提升连杆被向下调整至中位,所述提升连杆复位,同时将处于提升板上的托盘放下,完成卸货。当立体仓储机器人运行至子轨和母轨接触位置处,所述提升连杆被向下调整至下位,立体仓储机器人完全从子轨切换至母轨上,完成换向。
上述三个切换过程,完全通过传动轴、凸轮组件、齿轮啮合完成,结构简单,避免了液压泄露或者连杆机构复杂导致的安装和操作精度低的问题,提高了操作稳定性和可靠性。
附图说明
附图用来提供对本发明的进一步理解,且构成说明书的一部分,发明的实施例一起用于解释本发明,构成对本发明的限制。
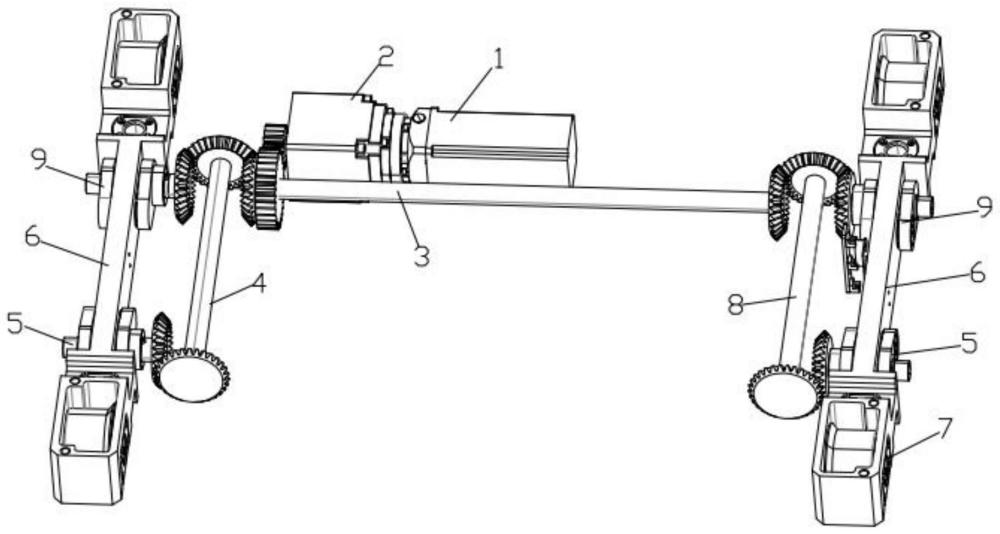
图1为本发明的立体仓储机器人的结构示意图。
图2为本发明的顶部配置有提升板的立体仓储机器人的示意图。
图3为本发明的立体仓储机器人的侧面视图。
图4为本发明的第一凸轮组件的结构示意图。
附图标记:
1.电机;2.减速机;3.主传动轴;4.第一传动轴;
5.第一凸轮组件;51.第一凸轮;52.连接杆;53.第二凸轮;54.输入段;
6.提升连杆;7.母轨轮;8.第二传动轴;9.第二凸轮组件;10.提升板。
具体实施方式
为了使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本发明的部分实施例,而不是全部实施例。
立体仓储机器人在货架上搬运物品时,需要在不同的货架区域之间来回运行,不断往返运动以搬运物品。当立体仓储机器人从子轨货架区域运行至母轨货架区域时,需要将立体仓储机器人的轮子从子轨切换至母轨上。为了实现立体仓储机器人的轨道切换,现在立体仓储机器人配置有提升机构以便于完成切换动作,为了提高立体仓储机器人取货、卸货和子轨母轨之间换向的稳定性,本实施例提供一种锥齿型立体仓储机器人举升换向机构。
参照图1和图2,所述锥齿型立体仓储机器人举升换向机构,包括电机1,所述电机1输出的动力通过减速机2传递至主传动轴3,所述主传动轴3的两端分别通过齿轮驱动第一传动轴4和第二传动轴8。
所述锥齿型立体仓储机器人举升换向机构还包括提升连杆6,两个所述提升连杆6分别平行的布置在第一传动轴4和第二传动轴8的相背的一侧,并且和相对应的第一传动轴4或第二传动轴8通过齿轮啮合配合。在所述提升连杆6的两端分别可转动的安装有母轨轮7。以及
第一凸轮组件5和第二凸轮组件9以旋转轴和主传动轴3平行的方向可转动的安装在同一个所述提升连杆6上。
所述电机1通过减速机2驱动主传动轴3,所述主传动轴3的两端分别通过齿轮驱动第一传动轴4和第二传动轴8转动,所述第一传动轴4和所述第二传动轴8的结构以及传动方式一致。
本实施例中,在所述第一传动轴4的两端分别同轴安装一个齿轮,所述主传动轴3的一端通过齿轮驱动所述第一传动轴4的一端的一个齿轮以带动第一传动轴4转动,并且所述第一传动轴4上的所述一个齿轮和所述第二凸轮组件9的上配置的齿轮相啮合传动。
同时,所述第一传动轴4的另一端的设置另一个齿轮,所述另一个齿轮和同一个所述提升连杆6上的第一凸轮组件5通过齿轮啮合传动。即第一凸轮组件5和第二凸轮组件9在齿轮的驱动下分别同时向着相反的方向转动。所述主传动轴通3过偶数个圆柱齿轮的啮合,将动力分别传递至所述第一凸轮组件5或所述第二凸轮组件9。
当所述立体仓储机器人处于空载状态时,第一凸轮组件5和第二凸轮组件9都处于水平位置,所述提升连杆6处于中位。
当第一凸轮组件5和第二凸轮组件9在电机的驱动下转动到竖立向下位置时,相应的所述提升连杆6在纵向上被调整至上位,所述提升连杆6向上顶起设置在上方的提升板10,提升板向上顶起托盘(托盘内放置货物),以完成取货。
当所述立体仓储机器人在子轨上将物品搬运至目标位置之后,所述电机驱动第一凸轮组件5和第二凸轮组件9转动,以带动所述提升连杆6在纵向上从上位向下移动至中位,提升板随之被放下,和托盘在纵向上脱离,托盘被放下以完成卸货。
当所述立体仓储机器人运行至子轨和母轨的交叉位置处(本实施例中,子轨和母轨交叉成90度),所述电机驱动第一凸轮组件5和第二凸轮组件9转动,以带动所述提升连杆6在纵向上向下移动至下位,所述提升连杆6上的母轨轮7向下抵触至母轨上,所述立体仓储机器人从子轨切换至母轨上。
关于所述主传动轴3将动力分别传递至两侧的所述提升连杆6,以实现两个所述提升连杆6同时动作的过程如下:
参照图1,所述主传动轴3的两端通过端部的齿轮分别和所述第一传动轴4、所述第二传动轴8的端部的齿轮啮合,以带动所述第一传动轴4、所述第二传动轴8同时转动。所述第一传动轴4的两端通过齿轮驱动对应的一个所述提升连杆6上的所述第一凸轮组件5和所述第二凸轮组件9同时反向转动。所述第二传动轴8的两端通过齿轮驱动另一个所述提升连杆6上的所述第一凸轮组件5和所述第二凸轮组件9同时反向转动。当所述第一凸轮组件5和所述第二凸轮组件9处于水平位置时,所述提升连杆6处于中位。
当所述第一凸轮组件5和所述第二凸轮组件9转动至竖立向下时,将所述提升连杆6向下移动至下位。当所述第一凸轮组件5和所述第二凸轮组件9转动至竖立向上时,将所述提升连杆6向上顶起至上位。
随着所述第一凸轮组件5和所述第二凸轮组件9的转动,所述提升连杆6被逐渐调整至上位或下位,实现对所述提升连杆6的纵向位置的调整。该过程中完全通过传动轴、齿轮和凸轮传递动力,可以稳定的传递动力,避免了液压传递动力因为液压油泄露而导致的传动失败,本申请的传动结构简单,操作方便。
在另一个实施例中,立体仓储机器人取货和搬运物品的过程如下:
立体仓储机器人在子轨上运行至托盘的下方后,所述电机1顺时针转动时驱动第一传动轴4和第二传动轴8正向转动,带动所述第一凸轮组件5和所述第二凸轮组件9正向转动,相应的所述提升连杆6被调整至上位,将子轨上方的托盘顶起,以完成取货动作。之后所述提升连杆6保持在上位的位置,所述立体仓储机器人带动托盘沿着子轨运行,直至运行至目标卸货位置。
立体仓储机器人在运行至目标卸货位置后,所述电机1逆时针转动时驱动第一传动轴4和第二传动轴8转动,带动所述第一凸轮组件5和所述第二凸轮组件9转动,相应的所述提升连杆6被向下调整至中位,将托盘放下,完成卸货。
在另一个实施例中,在所述立体仓储机器人的和所述提升连杆相垂直的两端分别布置有两排子轨轮,子轨轮用于引导立体仓储机器人在所述子轨上行走。
当立体仓储机器人在子轨上运行时,由子轨轮引导立体仓储机器人沿着子轨运行。当所述立体仓储机器人运行至子轨和母轨的交叉位置处时,所述电机1转动驱动第一传动轴4和第二传动轴8转动,带动所述第一凸轮组件5和所述第二凸轮组件9转动,相应的所述提升连杆6被向下调整至下位且带动所述母轨轮7向下抵触至母轨上,将所述立体仓储机器人顶起使得所述子轨轮悬空,实现从子轨向母轨的切换。本实施例中,子轨和母轨相互垂直。
在另一个实施例中,当所述立体仓储机器人空载时,如果所述立体仓储机器人需要从子轨切换至母轨上,所述电机驱动所述第一凸轮组件5和所述第二凸轮组件9转动90度,以将所述提升连杆6从中位切换至下位,完成所述立体仓储机器人从子轨到母轨的换向。
在另一个实施例中,当所述立体仓储机器人满载时,如果所述立体仓储机器人需要从子轨切换至母轨上,所述电机驱动所述第一凸轮组件5和所述第二凸轮组件9转动180度,以将所述提升连杆6从上位切换至下位,完成所述立体仓储机器人从子轨到母轨的换向。
在另一个实施例中,参照图3,为满足换向需要,所述第一凸轮组件5和所述第二凸轮组件的结构一致。所述第一凸轮组件5包括第一凸轮51和第二凸轮53,所述第一凸轮51和所述第二凸轮53的形状一致,并且在垂直于两者相对的侧面的方向上对齐。
在所述第一凸轮51和所述第二凸轮53的相对应的一端之间垂直的安装有连接杆52。所述连接杆52可转动的穿设在所述提升连杆6内,所述第一凸轮51和所述第二凸轮53分别布置在所述提升连杆6的两侧。
在所述第一凸轮51的和所述连接杆52错开的一端的和背离所述第二凸轮53的一侧面设置有输入段54。所述输入段54和所述第一传动轴4或所述第二传动轴8的输出端通过齿轮啮合。
所述第一传动轴4或所述第二传动轴8通过齿轮驱动所述输入段54,所述输入段54带动所述第一凸轮51绕着所述连接杆52转动,相应的所述第二凸轮53随着转动。随着所述第一凸轮51和所述第二凸轮53的转动,所述第一凸轮51和所述第二凸轮53在纵向上的位置、倾斜角度随之改变,同时带动提升连杆6在纵向上上升或下降,以调整所述提升连杆6的纵向位置。据此将所述提升连杆6调整至上位、中位或下位。
应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
- 一种锥齿传动管道机器人的驱动机构
- 一种锥齿传动管道机器人
- 一种锥齿传动管道机器人的主体结构
- 一种举升装置的防坠机构及举升式机器人
- 一种举升装置的防坠机构及举升式机器人