一种高精度自由空间式太阳跟踪仪及其跟踪方法
文献发布时间:2023-06-19 09:32:16
技术领域
本发明属于自动化控制领域,具体涉及一种可以应用于中红外激光外差系统中的高精度自由空间式太阳跟踪仪及其跟踪方法。
技术背景
激光外差探测技术是近年来广泛应用于大气痕量气体柱浓度测量以及垂直廓线反演,具有高分辨率、采样时间短、体积小、重量轻等优点,激光外差探测对信号光和本振光的匹配有着严格的要求。而作为提供信号光的太阳跟踪仪,必须保证其提供的信号光具有很高的方向精度,才能满足测量的要求。为了最大效率地收集太阳光,必须将光学收集部分准确地指向太阳,使得在任何时刻收集到的太阳光在进入外差系统后后,其角度不发生改变。在激光外差探测中把太阳光作为信号光来探究大气吸收光谱,微小的跟踪误差都会导致激光外差效率的降低,以及跟踪误差所带来反演气体浓度测量精度的偏差。
发明内容
本发明要解决的技术问题为克服现有技术中的不足之处,提供一种高精度自由空间式太阳跟踪仪及其跟踪方法,所述自由空间式是指本发明通过跟踪部和入光反射镜的转动配合可以实现对日间太阳任意所在方位的跟踪。
本发明采用了以下技术方案:
一种高精度自由空间式太阳跟踪仪,其特征在于,包括数据处理系统、太阳跟踪系统和光处理系统,其中:
数据处理系统,包括上位机程序和上位机图像处理程序,所述上位机程序带有时间与空间位置测算功能;
太阳跟踪系统,包括电机控制器、电机和跟踪部,所述电机控制器从上位机程序获取指令控制所述电机带动跟踪部进行太阳跟踪;
光处理系统,包括出光反射镜和高像素CCD探测器,所述出光反射镜反射所述太阳跟踪系统采集到的光线至高像素CCD探测器,所述高像素CCD探测器对光线进行光斑收集并传递给所述上位机图像处理程序。
优选的,所述跟踪部包括承载电机、入光反射镜和固定反射镜,所述入光反射镜呈45°角设置在承载电机的竖直安装面上,且所述入光反射镜由所述承载电机控制转动,所述固定反射镜接受由入光反射镜反射的太阳光并将所述太阳光反射到出光反射镜上。
优选的,所述入光反射镜在承载电机的竖直安装面上绕设定的固定轴转动,所述固定轴与入光反射镜共面,且所述固定轴与该固定轴在所述竖直安装面上的投影呈45°角;所述固定反射镜设置在入光反射镜的出光光路上,且所述固定反射镜的镜面朝向入光反射镜并与水平面呈45°角设置。
优选的,所述光处理系统还包括窗片和成像筒,所述所述出光反射镜设置在所述固定反射镜的出光光路上,所述出光反射镜以与水平面呈45°角设置;所述窗片设置在所述出光反射镜的出光光路上,且所述窗片以与水平面垂直并与所述出光光路所在竖直面呈钝角或锐角设置,所述窗片用于反射太阳光的一面朝向出光反射镜;所述成像筒垂直设置于高像素CCD探测器表面,且所述成像筒中轴线与所述窗片的反射光路共线。
优选的,所述窗片以与水平面垂直并与所述出光光路所在竖直面呈45°角设置。
优选的,所述电机、电机控制器和光处理系统设置于封闭箱体内,所述跟踪部坐落于封闭箱体顶面并通过电机转动件与封闭箱体连接。
优选的,所述封闭箱体靠近所述跟踪部一侧的箱体内壁设置有直筒,所述直筒的入光端与跟踪部的出光口连接;所述跟踪部(23)绕该直筒的中心轴线转动。
优选的,所述成像筒靠近窗片的一端为带有圆孔的封闭状,所述圆孔与窗片之间设有一段设定距离用于光线在成像筒小孔成像。
优选的,所述光处理系统还包括衰光片,所述衰光片覆盖在所述成像筒的圆孔来光方向的前方。
本发明中,电机内设置有编码器,用于反馈跟踪部的位置速度参数和提高电机响应时间并减少震动;数据处理系统带有PID调节进一步提高响应时间。
优选的,所述光处理系统外接激光外差系统,所述封闭箱体在所述窗片的透射光路上开设通孔,使得所述窗片透射的太阳光通过通孔4进入激光外差系统以作为激光外差探测的信号光源。
上述一种高精度自由空间式太阳跟踪仪的跟踪方法,具体步骤如下:
S1.上位机程序通过已知的时间和位置信息算出初始的太阳高度角和方位角,得到当前跟踪部中入光反射镜的位置与所述入光反射镜需要面向太阳时的位置之间的角度差值,转换成电机和承载电机需要转动的步数发送给电机控制器,电机控制器接受到转动指令后控制电机带动跟踪部于水平方向转动使跟踪部中入光反射镜对准太阳,同时,承载电机控制入光反射镜绕设定的固定轴转动并调整角度接受太阳光并将太阳光反射到固定反射镜上;
S2.固定反射镜将接收到的太阳光反射,太阳光通过直筒后到达出光反射镜,出光反射镜再次反射太阳光至窗片,窗片反射太阳光经过衰光片衰光并经成像筒的圆孔成像后打到高像素CCD探测器上,高像素CCD探测器收集成像即太阳光斑并将光斑信息传递给上位机图像处理程序;窗片同时透射未反射的太阳光通过封闭箱体侧壁上开设的通孔进入外差激光系统;
S3.上位机图像处理程序对得到的太阳光斑图像进行二值化和中值滤波去噪处理后发送给上位机程序,上位机程序对比太阳光斑中心位置与高像素CCD探测器视场中心的像素差值,转换成电机和和承载电机需要转动的步数发送给电机控制器,电机控制器控制电机和承载电机调整跟踪方向,使太阳光斑中心位置与视场中心重合,达到精准跟踪。
本发明的有益效果在于:
1)本发明的跟踪部与光处理系统分隔设置且跟踪部设置位置较高,增加了采集太阳光效率;高精度CCD探测器在光处理系统中与窗片位置固定,而非安装在电机上跟随转动,消除了电机转动时抖动带来的影响,大大提高了采集图像的稳定度;图像处理程序采用二值化和中值滤波进行去噪处理,可以较好的排除图像采集中因光线反射时各反射镜或窗片脏污等带来的杂点,提高了图像清晰度进而提高跟踪精度。
2)本发明中电机内部设置有编码器,可以反馈跟踪部的位置速度参数至数据处理系统和提高电机响应速度并缓和电机启动和停止时的振动,进一步提高图像采集精度;数据处理系统设置有PID调节并可以接受电机速度位置反馈,可以减小系统响应时间对精度的影响。
3)本发明的自由空间式太阳跟踪仪的跟踪精度高,X,Y轴方向跟踪精度分别达到0.0038度,0.003度能够满足激光外差探测在大气和天文领域中对太阳光收集的要求,因此可以作为中红外激光外差技术的配套装置为激光外差系统提供探测信号光源。
附图说明
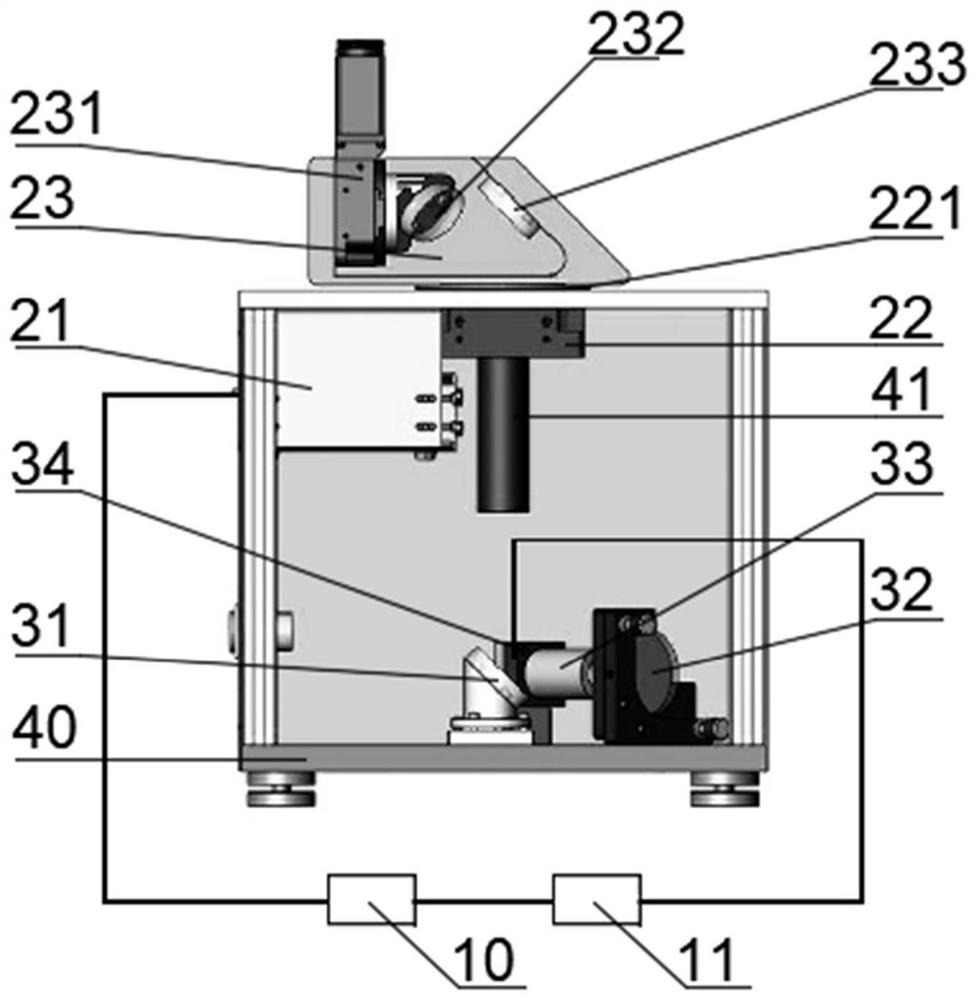
图1为本发明的结构示意图;
图2为本发明电机、电机转动件和直筒的位置关系示意图,其中图2A为正视图,图2B为俯视图;
图3为本发明光处理系统各组件的位置俯视图;
图4A、图4B为本发明窗片的安装的结构示意图;
图5为光处理系统中小孔成像的光路径示意图,窗片表示由窗片反射的太阳光作为光源;
图6为本发明太阳光斑经上位机图像处理程序处理的对比图;
图7为本发明封闭箱体侧壁开设通孔的示意图。
图中标注符号的含义如下:
10-上位机程序 11-上位机图像处理程序 21-电机控制器 22-电机
221-电机转动件 23-跟踪部 231-承载电机 232-入光反射镜
233-固定反射镜 31-出光反射镜 32-窗片 321-底座 33-成像筒
331-圆孔 34-高像素CCD探测器 35-衰光片 40-封闭箱体 41-直筒
42-通孔
具体实施方式
下面结合附图来对本发明的技术方案做出更为具体的说明:
实施例一
如图1-6所示,一种高精度自由空间式太阳跟踪仪,包括数据处理系统、太阳跟踪系统和光处理系统,其中数据处理系统包括上位机程序10和上位机图像处理程序11,上位机程序10带有时间与空间位置测算功能;太阳跟踪系统包括电机控制器21、电机22和跟踪部,电机控制器21从上位机程序10获取指令控制电机22带动跟踪部进行太阳跟踪;光处理系统包括出光反射镜31、窗片32、成像筒33和高像素CCD探测器34,光处理系统用于对太阳跟踪系统采集到的光线进行光斑收集并传递给上位机图像处理程序11。
电机22、电机控制器21和光处理系统设置于封闭箱体40内,跟踪部坐落于封闭箱体40顶面并通过发动机转动件221与封闭箱体40连接,承载数据处理系统的硬件设备可以设置在封闭箱体40内部或箱体外接。
跟踪部包括承载电机231、入光反射镜232和固定反射镜233,整体设置为开放式槽体结构,槽体为带有左侧边、底边和右侧边的直角梯形结构,其中左侧边与底边向垂直,承载电机231紧靠左侧边横向设置,入光反射镜232设置于承载电机231一端与安装面呈45°角安装并由承载电机231控制转动,具体的,入光反射镜232在承载电机231的竖直安装面上绕设定的固定轴转动,固定轴与入光反射镜232共面并经过入光反射镜232在空间位置上的最低点,固定轴与其在竖直安装面上的投影呈45°角。槽体的右侧边朝向左侧边45°角倾斜,固定反射镜233设置在右侧边内壁上并与入光反射镜232在水平方向共轴,固定反射镜233接受由入光反射镜232反射的太阳光并将太阳光竖直向下反射。
光处理系统设置在箱体的底部,出光反射镜31设置在固定反射镜233的反射光路上,且出光反射镜31与固定反射镜233的中心在竖直位置上共线,,出光反射镜31以与水平面呈45°角设置;窗片32设置在出光反射镜31的出光光路上,且窗片32以与水平面垂直并与所述出光光路所在竖直面呈45°角设置在底座321上以达到最高反射效率,窗片32用于反射太阳光的一面朝向出光反射镜31;成像筒33和高像素CCD探测器34沿窗片32中心法线设置,成像筒33远离窗片32的一端固定设置在高像素CCD探测器34的前盖板上,且成像筒33靠近窗片32一端为带有圆孔331的封闭状,圆孔331距离窗片32设有一段设定距离,该设定距离满足窗片32反射光线通过圆孔331并在成像筒33内小孔成像,成像落在高像素CCD探测器34的感光面上。出光反射镜31、窗片32、高像素CCD探测器34均设置有底座,使光线在三者间的反射路径始终在同一个水平平面上。
封闭箱体40靠近跟踪部23一侧的内壁设置有直筒41,直筒41依次贯穿电机转动件221、封闭箱体40靠近跟踪部一侧的内壁和电机22,且直筒41的入光端与跟踪部23的出光口连接,具体为直筒41的上端筒口在电机转动件221处与电机转动件221上表面平齐,另一端筒口自电机22下表面穿出并向下延伸一段设定距离,使直筒41下端筒口位于电机控制器21下底面所在平面与出光反射镜31最高点所在水平面之间,跟踪部23在电机转动件221上绕直筒41的中轴线转动。直筒41用于使固定反射镜233竖直向下反射的太阳光通过,避免封闭箱体40内装置对光线光路的干扰,直筒41内壁设置为黑色。
窗片32材质为氟化钙白片或二氧化硅玻璃或硒化锌,窗片32自身不分正反面,前述用于反射太阳光的一面是指接受太阳光并正对成像筒33的一面;成像筒33圆孔来光方向的前方覆盖有衰光片35,衰光片35采用常规衰光片或巴德膜。
本实施方式中,电机22和承载电机231均为带有编码器的步进电机22,编码器用于反馈跟踪部的位置速度参数到数据处理系统和提高电机22响应时间并缓和电机22启动和停止时的振动,进一步提高图像采集精度;数据处理系统设置有PID调节并可以接受电机22速度位置反馈,可以减小系统响应时间对精度的影响。电机控制器21还外接控制按钮,控制按钮设置在箱体外侧,便于手动调试电机22。
实施例二
如图7所示,本实施例二与实施例一的实施方式相同,区别在于光处理系统还外接激光外差系统。封闭箱体40靠近窗片32的一侧侧壁上开设有通孔42,通孔42设置在窗片32的透射光路上,使得窗片32透射的太阳光通过通孔42进入激光外差系统以作为激光外差探测的信号光源。
实施例三
本高精度自由空间式太阳跟踪仪的跟踪方法包括如下步骤:
S1.上位机程序10通过已知的时间和位置信息算出初始的太阳高度角和方位角,得到当前跟踪部23中入光反射镜232的位置与所述入光反射镜232需要面向太阳时的位置之间的角度差值,转换成电机22和承载电机231需要转动的步数发送给电机控制器21,电机控制器21接受到转动指令后控制电机22带动跟踪部23水平方向转动使跟踪部23中入光反射镜232对准太阳,同时,承载电机231控制入光反射镜232绕设定的固定轴转动并调整角度接受太阳光并将太阳光反射到固定反射镜233上;
S2.固定反射镜233将接收到的太阳光反射,太阳光通过直筒41后到达出光反射镜31,出光反射镜31再次反射太阳光至窗片32,窗片32反射太阳光经过衰光片45衰光并经成像筒33的圆孔331成像后打到高像素CCD探测器34上,高像素CCD探测器34收集成像即太阳光斑并将光斑信息传递给上位机图像处理程序11;窗片32同时透射未反射的太阳光通过封闭箱体40侧壁上开设的通孔42进入外差激光系统;
S3.上位机图像处理程序11对得到的太阳光斑图像进行二值化和中值滤波去噪处理后发送给上位机程序10,上位机程序10对比太阳光斑中心位置与高像素CCD探测器34视场中心的像素差值,转换成电机22和承载电机231需要转动的步数发送给电机控制器21,电机控制器21控制电机22和承载电机231调整跟踪方向,使太阳光斑中心位置与视场中心重合,达到精准跟踪。
上述视场中心为高像素CCD探测器34像素在X、Y方向上的一半值,本实施例中高像素CCD探测器34像素为1920×1080,则视场中心为(960,540)。
以上仅为本发明创造的较佳实施例而已,并不用以限制本发明创造;尽管参照前述实施方式对本发明进行了详细的说明,本领域的普通技术人员应当理解:凡在本发明创造的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明创造的保护范围之内。