道岔转辙机故障识别方法及装置
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及轨道交通技术领域,尤其涉及一种道岔转辙机故障识别方法及装置。
背景技术
道岔转辙机是道岔的转换装置,可用来转换道岔或锁闭道岔。道岔转辙机的故障可能会导致在轨列车的出轨,从而导致巨大的经济损失与人员伤亡。道岔转辙机的电流时间序列曲线,可以被用来判断道岔转辙机所处的工作状态,例如判断道岔转辙机是否处于正常工作状态,如果处于异常工作状态,进一步判断道岔转辙机处于哪一种异常工作状态。
依据道岔转辙机的电流时间序列曲线判断转辙机所处的工作状态的核心,是对于给定的道岔转辙机的待检索电流时间序列曲线,检索给定的道岔转辙机故障电流数据库中是否存在形状上与待检索电流时间序列曲线相似的曲线。判断曲线形状上是否相似,最简单的方法是采用欧式距离度量:即逐点计算两条曲线之间欧氏距离,然后对所有点欧氏距离之和取平均。
采用欧式距离评估两条曲线的相似度存在以下几个方面问题:首先,欧式距离无法正确计算曲线出现扭曲形变之后的真实相似度;其次,欧氏距离面对复杂曲线时,表现能力较弱。如图1所示,为两条形状发生平移的曲线Q和C,通过计算欧式距离的方式无法正确计算二者之间的相似度。因此,对于两条曲线之间的相似度计算常采用动态时间归整(Dynamic Time Warping,DTW)距离,DTW距离能够应对曲线之间的扭曲、平移与变换,具有很强的鲁棒性。但是由于DTW距离计算时间复杂度高,若是计算道岔转辙机故障电流数据库中每一条电流时间序列曲线与待检索电流时间序列曲线之间的DTW距离,整体则需要耗费大量时间,无法实际使用。
发明内容
本发明实施例提供一种道岔转辙机故障识别方法及装置,用以解决现有技术中存在的缺陷。
本发明实施例提供一种道岔转辙机故障识别方法,包括:
获取道岔转辙机的待识别电流时间序列曲线,并对所述待识别电流时间序列曲线进行预处理;
对于道岔转辙机故障电流数据库中的每一条样本电流时间序列曲线,确定所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Kim下界距离,若判断获知所述LB_Kim下界距离小于当前最小动态时间规整DTW距离,则确定所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Keogh下界距离;所述样本电流时间序列曲线经过预处理且携带有道岔转辙机的故障信息;所述当前最小DTW距离的初始值为无穷大;
若判断获知所述LB_Keogh下界距离小于所述当前最小DTW距离,则计算所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的DTW距离;
将所有DTW距离中最小DTW距离对应的样本电流时间序列曲线携带的故障信息作为所述待识别电流时间序列曲线对应的故障信息。
根据本发明一个实施例的道岔转辙机故障识别方法,还包括:
若判断获知所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的DTW距离小于所述当前最小DTW距离,则更新所述当前最小DTW距离为所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的DTW距离。
根据本发明一个实施例的道岔转辙机故障识别方法,还包括:
若判断获知所述LB_Kim下界距离大于等于所述当前最小DTW距离,则结束对所述样本电流时间序列曲线的后续计算,并继续计算其他样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Kim下界距离。
根据本发明一个实施例的道岔转辙机故障识别方法,还包括:
若判断获知所述LB_Keogh下界距离大于等于所述当前最小DTW距离,则结束对所述样本电流时间序列曲线的后续计算,并继续计算其他样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Kim下界距离。
根据本发明一个实施例的道岔转辙机故障识别方法,所述对所述待识别电流时间序列曲线进行预处理,具体包括:
将所述待识别电流时间序列曲线采样至指定长度;
将指定长度的待识别电流时间序列曲线进行零-均值规范化处理。
根据本发明一个实施例的道岔转辙机故障识别方法,所述确定所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Keogh下界距离,具体包括:
计算所述待识别电流时间序列曲线的LB_Keogh下界;
计算所述待识别电流时间序列曲线的LB_Keogh下界与预先确定的所述样本电流时间序列曲线的LB_Keogh下界的距离,并将所述距离作为所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Keogh下界距离。
根据本发明一个实施例的道岔转辙机故障识别方法,所述确定所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Kim下界距离,具体包括:
分别计算所述待识别电流时间序列曲线的LB_Kim下界以及所述样本电流时间序列曲线的LB_Kim下界;
计算所述待识别电流时间序列曲线的LB_Kim下界与所述样本电流时间序列曲线的LB_Kim下界的距离,并将所述距离作为所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Kim下界距离。
本发明实施例还提供一种道岔转辙机故障识别系统,包括:曲线获取模块、下界距离确定模块、DTW距离确定模块以及故障信息确定模块。其中,
曲线获取模块用于获取道岔转辙机的待识别电流时间序列曲线,并对所述待识别电流时间序列曲线进行预处理;
下界距离确定模块用于对于道岔转辙机故障电流数据库中的每一条样本电流时间序列曲线,确定所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Kim下界距离,若判断获知所述LB_Kim下界距离小于当前最小动态时间规整DTW距离,则确定所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Keogh下界距离;所述样本电流时间序列曲线经过预处理且携带有道岔转辙机的故障信息;所述当前最小DTW距离的初始值为无穷大;
DTW距离确定模块用于若判断获知所述LB_Keogh下界距离小于所述当前最小DTW距离,则计算所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的DTW距离;
故障信息确定模块用于将所有DTW距离中最小DTW距离对应的样本电流时间序列曲线携带的故障信息作为所述待识别电流时间序列曲线对应的故障信息。
本发明实施例还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述道岔转辙机故障识别方法的步骤。
本发明实施例还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述道岔转辙机故障识别方法的步骤。
本发明实施例提供的道岔转辙机故障识别方法及装置,在计算每个样本电流时间序列曲线与所述待识别电流时间序列曲线之间的DTW距离之前,先后判断样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Kim下界距离、LB_Keogh下界距离是否小于当前最小DTW距离,只有在确定样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Kim下界距离、LB_Keogh下界距离均小于当前最小DTW距离,才会计算样本电流时间序列曲线与待识别电流时间序列曲线之间的DTW距离,并将所有DTW距离中最小DTW距离对应的样本电流时间序列曲线携带的故障信息作为待识别电流时间序列曲线对应的故障信息。如此可以剔除道岔转辙机故障电流数据库中大量与待识别电流时间序列曲线不相近的曲线,可以大大缩短检索的时间,进而提供故障信息的识别效率。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是现有技术中两条形状发生平移的曲线Q和C的示意图;
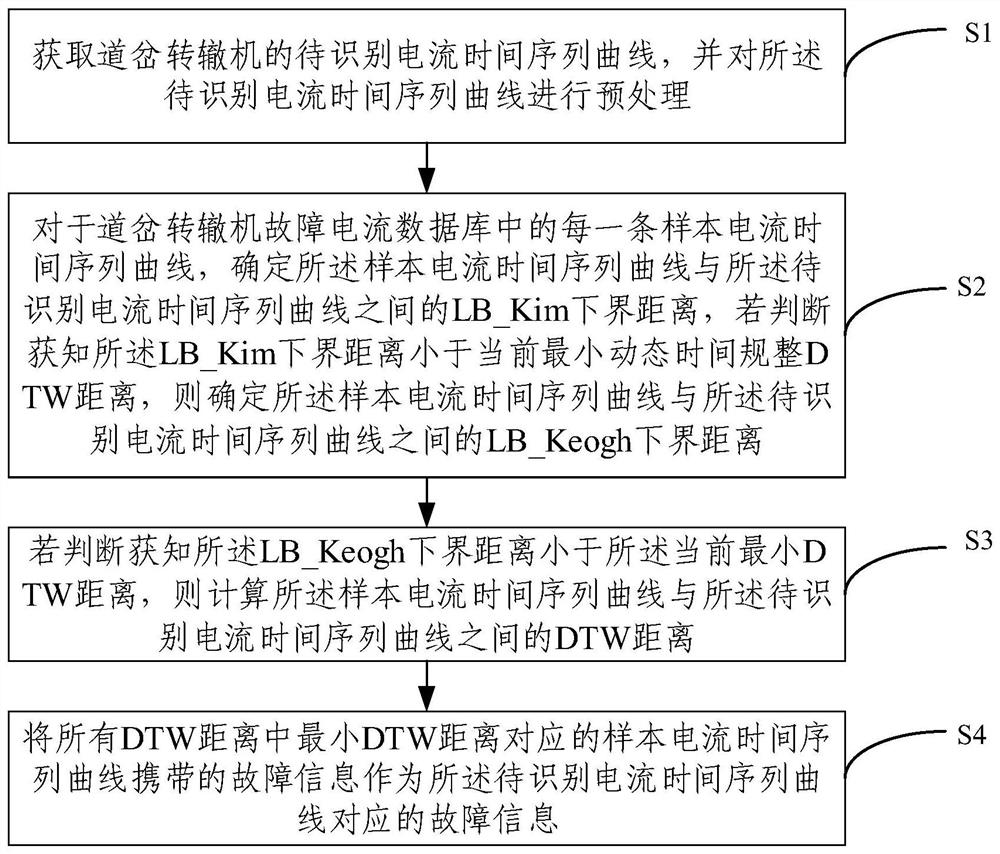
图2是本发明实施例提供的一种道岔转辙机故障识别方法的流程示意图;
图3是本发明实施例提供的一种道岔转辙机故障识别装置的结构示意图;
图4是本发明实施例提供的一种电子设备的结构示意图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
图2为本发明实施例中提供的一种道岔转辙机故障识别方法的流程示意图,如图2所示,该方法包括:
S1,获取道岔转辙机的待识别电流时间序列曲线,并对所述待识别电流时间序列曲线进行预处理;
S2,对于道岔转辙机故障电流数据库中的每一条样本电流时间序列曲线,确定所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Kim下界距离,若判断获知所述LB_Kim下界距离小于当前最小动态时间规整DTW距离,则确定所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Keogh下界距离;所述样本电流时间序列曲线经过预处理且携带有道岔转辙机的故障信息;所述当前最小DTW距离的初始值为无穷大;
S3,若判断获知所述LB_Keogh下界距离小于所述当前最小DTW距离,则计算所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的DTW距离;
S4,将所有DTW距离中最小DTW距离对应的样本电流时间序列曲线携带的故障信息作为所述待识别电流时间序列曲线对应的故障信息。
具体地,本发明实施例中提供的道岔转辙机故障识别方法中,对于给定的道岔转辙机的待识别电流时间序列曲线,通过确定其与道岔转辙机故障电流数据库中的每一条样本电流时间序列曲线之间的动态时间归整(Dynamic Time Warping,DTW)距离,找到道岔转辙机故障电流数据库中最相近的样本电流时间序列曲线,该样本电流时间序列曲线携带的故障信息即作为待识别电流时间序列曲线对应的故障信息,本发明实施例中对于确定DTW距离的过程进行改进,进而可以更快速地确定出道岔转辙机的故障信息。
首先执行步骤S1,获取道岔转辙机的待识别电流时间序列曲线,并对待识别电流时间序列曲线进行预处理。预处理具体可以是对待识别电流时间序列曲线进行采样,使之长度变为指定长度。还可以对待识别电流时间序列曲线进行归一化处理,使之便于后续与样本电流时间序列曲线进行距离计算。
然后执行步骤S2,对于道岔转辙机故障电流数据库中的每一条样本电流时间序列曲线i(1≤i≤I,I为道岔转辙机故障电流数据库中所有样本电流时间序列曲线的总数),确定样本电流时间序列曲线i与待识别电流时间序列曲线之间的LB_Kim下界距离。其中,道岔转辙机故障电流数据库中样本电流时间序列曲线i具有数据库主键id,用于对样本电流时间序列曲线进行标识。样本电流时间序列曲线是需要经过预处理的,且携带有道岔转辙机的故障信息。LB_Kim下界距离是指样本电流时间序列曲线i的LB_Kim下界与待识别电流时间序列曲线的LB_Kim下界之间的距离。LB_Kim下界距离能够以常数时间复杂度获取样本电流时间序列曲线i与待识别电流时间序列曲线的DTW距离的下界。
对计算出的LB_Kim下界距离与当前最小DTW距离之间的大小关系进行判断,当前最小DTW距离的初始值可以设置为无穷大。如果LB_Kim下界距离小于当前最小DTW距离,则说明该样本电流时间序列曲线i是有可能成为与待识别电流时间序列曲线最相近的曲线。因此,可以进一步确定样本电流时间序列曲线i与待识别电流时间序列曲线之间的LB_Keogh下界距离。其中,LB_Keogh下界距离是指样本电流时间序列曲线i的LB_Keogh下界与待识别电流时间序列曲线的LB_Keogh下界之间的距离。LB_Keogh下界距离能够以O(n)时间复杂度获取样本电流时间序列曲线i与待识别电流时间序列曲线的DTW距离的下界。
然后执行步骤S3,对计算出的LB_Keogh下界距离与当前最小DTW距离之间的大小关系进行判断,如果LB_Keogh下界距离小于当前最小DTW距离,则说明该样本电流时间序列曲线i是有可能成为与待识别电流时间序列曲线最相近的曲线。因此,此时计算样本电流时间序列曲线i与待识别电流时间序列曲线之间的DTW距离。在此基础上,还可以采用早停策略,对计算进行剪枝。
最后执行步骤S4,确定出所有DTW距离,然后从所有DTW距离中选择最小DTW距离,该最小DTW距离对应的样本电流时间序列曲线携带的故障信息作为待识别电流时间序列曲线对应的故障信息。该故障信息即为道岔转辙机的故障信息。
由于计算LB_Kim下界距离的时间复杂度为常数,计算LB_Keogh下界距离的时间复杂度为O(n),即使二者之和也远小于直接计算DTW距离时间复杂度O(n
本发明实施例中提供的道岔转辙机故障识别方法,在计算每个样本电流时间序列曲线与所述待识别电流时间序列曲线之间的DTW距离之前,先后判断样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Kim下界距离、LB_Keogh下界距离是否小于当前最小DTW距离,只有在确定样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Kim下界距离、LB_Keogh下界距离均小于当前最小DTW距离,才会计算样本电流时间序列曲线与待识别电流时间序列曲线之间的DTW距离,并将所有DTW距离中最小DTW距离对应的样本电流时间序列曲线携带的故障信息作为待识别电流时间序列曲线对应的故障信息。如此可以剔除道岔转辙机故障电流数据库中大量与待识别电流时间序列曲线不相近的曲线,可以大大缩短检索的时间,进而提供故障信息的识别效率。
经过试验,针对给定时序,检索数十万时序中最相似的曲线,采用本发明实施例中提供的道岔转辙机故障识别方法,相比较原有的基于DTW的检索方法提升了近250倍的速度,相比较原来单次检索的分钟级响应时间,达到了毫秒级响应的速度。
在上述实施例的基础上,本发明实施例中提供的道岔转辙机故障识别方法,还包括:
若判断获知所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的DTW距离小于所述当前最小DTW距离,则更新所述当前最小DTW距离为所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的DTW距离。
具体地,如果样本电流时间序列曲线i与待识别电流时间序列曲线之间的DTW距离小于当前最小DTW距离,则说明当前最小DTW距离已经不是最小的DTW距离,因此需要将当前最小DTW距离更新为样本电流时间序列曲线i与待识别电流时间序列曲线之间的DTW距离。
本发明实施例中,根据样本电流时间序列曲线i与待识别电流时间序列曲线之间的DTW距离对当前最小DTW距离进行更新,可以保证当前最小DTW距离的准确性。
在上述实施例的基础上,本发明实施例中提供的道岔转辙机故障识别方法,还包括:
若判断获知所述LB_Kim下界距离大于等于所述当前最小DTW距离,则结束对所述样本电流时间序列曲线的后续计算,并继续计算其他样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Kim下界距离。
具体地,如果LB_Kim下界距离大于等于当前最小DTW距离,则说明样本电流时间序列曲线i与待识别电流时间序列曲线之间的DTW距离一定不是最小的,因此可以不用对样本电流时间序列曲线i进行后续计算,即可以结束对样本电流时间序列曲线i进行后续计算,并继续计算其他样本电流时间序列曲线与待识别电流时间序列曲线之间的LB_Kim下界距离。
本发明实施例中,当LB_Kim下界距离大于等于当前最小DTW距离时结束对样本电流时间序列曲线i进行后续计算,可以避免因计算样本电流时间序列曲线i与待识别电流时间序列曲线之间的DTW距离产生的时间浪费,可以提高曲线检索的效率,进而提高道岔转辙机故障识别的效率。
在上述实施例的基础上,本发明实施例中提供的道岔转辙机故障识别方法,还包括:
若判断获知所述LB_Keogh下界距离大于等于所述当前最小DTW距离,则结束对所述样本电流时间序列曲线的后续计算,并继续计算其他样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Kim下界距离。
具体地,如果LB_Kim下界距离小于当前最小DTW距离,但LB_Keogh下界距离大于等于当前最小DTW距离,则也可以说明样本电流时间序列曲线i与待识别电流时间序列曲线之间的DTW距离一定不是最小的,因此也可以不用对样本电流时间序列曲线i进行后续计算,即结束对样本电流时间序列曲线i进行后续计算,并继续计算其他样本电流时间序列曲线与待识别电流时间序列曲线之间的LB_Kim下界距离。
本发明实施例中,当LB_Kim下界距离小于当前最小DTW距离,但LB_Keogh下界距离大于等于当前最小DTW距离时结束对样本电流时间序列曲线i进行后续计算,可以避免因计算样本电流时间序列曲线i与待识别电流时间序列曲线之间的DTW距离产生的时间浪费,可以提高曲线检索的效率,进而提高道岔转辙机故障识别的效率。
在上述实施例的基础上,本发明实施例中提供的道岔转辙机故障识别方法,对所述待识别电流时间序列曲线进行预处理,具体包括:
将所述待识别电流时间序列曲线采样至指定长度;
将指定长度的待识别电流时间序列曲线进行零-均值规范化处理。
具体地,本发明实施例中,预处理操作具体可以包括:对待识别电流时间序列曲线进行采样处理,将待识别电流时间序列曲线变为指定长度。即将待识别电流时间序列曲线采样至指定长度w,若待识别电流时间序列曲线的长度低于w则进行上采样插值,若待识别电流时间序列曲线的长度高于w则进行下采样。
然后,将指定长度的待识别电流时间序列曲线进行零-均值规范化处理。其中,零-均值规范化处理又可以成为Z归一化处理,具体可以通过如下公式实现:
其中,TS’为指定长度的待识别电流时间序列曲线中每一个采样点经Z归一化处理后的结果,TS为指定长度的待识别电流时间序列曲线中每一个采样点的取值,mean(TS)为指定长度的待识别电流时间序列曲线中所有采样点的取值的均值,std(TS)为指定长度的待识别电流时间序列曲线中所有采样点的取值的方差。
在上述实施例的基础上,本发明实施例中提供的道岔转辙机故障识别方法,所述确定所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Keogh下界距离,具体包括:
计算所述待识别电流时间序列曲线的LB_Keogh下界;
计算所述待识别电流时间序列曲线的LB_Keogh下界与预先确定的所述样本电流时间序列曲线的LB_Keogh下界的距离,并将所述距离作为所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Keogh下界距离。
具体地,本发明实施例中在计算LB_Keogh下界距离时,可以实时计算待识别电流时间序列曲线的LB_Keogh下界,而对于样本电流时间序列曲线的LB_Keogh下界,可以在构建道岔转辙机故障电流数据库时预先确定,这是因为,LB_Keogh下界的时间复杂度较高,计算耗费时间较长,因此可以通过预先确定的方式降低实时计算LB_Keogh下界产生的时间浪费。
另外,对于样本电流时间序列曲线的LB_Kim下界,也可以在构建道岔转辙机故障电流数据库时预先确定,以节约实时计算LB_Kim下界产生的时间浪费。
在上述实施例的基础上,本发明实施例中提供的道岔转辙机故障识别方法,所述确定所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Kim下界距离,具体包括:
分别计算所述待识别电流时间序列曲线的LB_Kim下界以及所述样本电流时间序列曲线的LB_Kim下界;
计算所述待识别电流时间序列曲线的LB_Kim下界与所述样本电流时间序列曲线的LB_Kim的距离,并将所述距离作为所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Kim下界距离。
具体地,本发明实施例中在确定LB_Kim下界距离时,可以分别实时计算待识别电流时间序列曲线的LB_Kim下界以及样本电流时间序列曲线的LB_Kim下界,这是因为,LB_Kim下界的时间复杂度较低,计算耗费时间较短,实时计算LB_Keogh下界产生的时间浪费可以忽略不计。
图3为本发明实施例中提供的一种道岔转辙机故障识别系统的结构示意图,如图3所示,该系统包括:曲线获取模块31、下界距离确定模块32、DTW距离确定模块33以及故障信息确定模块34。其中,
曲线获取模块31用于获取道岔转辙机的待识别电流时间序列曲线,并对所述待识别电流时间序列曲线进行预处理;
下界距离确定模块32用于对于道岔转辙机故障电流数据库中的每一条样本电流时间序列曲线,确定所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Kim下界距离,若判断获知所述LB_Kim下界距离小于当前最小动态时间规整DTW距离,则确定所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Keogh下界距离;所述样本电流时间序列曲线经过预处理且携带有道岔转辙机的故障信息;所述当前最小DTW距离的初始值为无穷大;
DTW距离确定模块33用于若判断获知所述LB_Keogh下界距离小于所述当前最小DTW距离,则计算所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的DTW距离;
故障信息确定模块34用于将所有DTW距离中最小DTW距离对应的样本电流时间序列曲线携带的故障信息作为所述待识别电流时间序列曲线对应的故障信息。
具体地,本发明实施例中提供的道岔转辙机故障识别系统中各模块的作用与上述方法类实施例中各步骤的操作流程是一一对应的,实现的效果也是一致的,具体参见上述实施例,本发明实施例中对此不再赘述。
图4示例了一种电子设备的实体结构示意图,如图4所示,该电子设备可以包括:处理器(processor)410、通信接口(CommunicationsInterface)420、存储器(memory)430和通信总线440,其中,处理器410,通信接口420,存储器430通过通信总线440完成相互间的通信。处理器410可以调用存储器430中的逻辑指令,以执行道岔转辙机故障识别方法,该方法包括:获取道岔转辙机的待识别电流时间序列曲线,并对所述待识别电流时间序列曲线进行预处理;对于道岔转辙机故障电流数据库中的每一条样本电流时间序列曲线,确定所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Kim下界距离,若判断获知所述LB_Kim下界距离小于当前最小动态时间规整DTW距离,则确定所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Keogh下界距离;所述样本电流时间序列曲线经过预处理且携带有道岔转辙机的故障信息;所述当前最小DTW距离的初始值为无穷大;若判断获知所述LB_Keogh下界距离小于所述当前最小DTW距离,则计算所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的DTW距离;将所有DTW距离中最小DTW距离对应的样本电流时间序列曲线携带的故障信息作为所述待识别电流时间序列曲线对应的故障信息。
此外,上述的存储器430中的逻辑指令可以通过软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本发明各个实施例所述方法的全部或部分步骤。而前述的存储介质包括:U盘、移动硬盘、只读存储器(ROM,Read-OnlyMemory)、随机存取存储器(RAM,Random Access Memory)、磁碟或者光盘等各种可以存储程序代码的介质。
另一方面,本发明实施例还提供一种计算机程序产品,所述计算机程序产品包括存储在非暂态计算机可读存储介质上的计算机程序,所述计算机程序包括程序指令,当所述程序指令被计算机执行时,计算机能够执行上述各方法实施例所提供的道岔转辙机故障识别方法,该方法包括:获取道岔转辙机的待识别电流时间序列曲线,并对所述待识别电流时间序列曲线进行预处理;对于道岔转辙机故障电流数据库中的每一条样本电流时间序列曲线,确定所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Kim下界距离,若判断获知所述LB_Kim下界距离小于当前最小动态时间规整DTW距离,则确定所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Keogh下界距离;所述样本电流时间序列曲线经过预处理且携带有道岔转辙机的故障信息;所述当前最小DTW距离的初始值为无穷大;若判断获知所述LB_Keogh下界距离小于所述当前最小DTW距离,则计算所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的DTW距离;将所有DTW距离中最小DTW距离对应的样本电流时间序列曲线携带的故障信息作为所述待识别电流时间序列曲线对应的故障信息。
又一方面,本发明实施例还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现以执行上述各实施例提供的道岔转辙机故障识别方法,该方法包括:获取道岔转辙机的待识别电流时间序列曲线,并对所述待识别电流时间序列曲线进行预处理;对于道岔转辙机故障电流数据库中的每一条样本电流时间序列曲线,确定所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Kim下界距离,若判断获知所述LB_Kim下界距离小于当前最小动态时间规整DTW距离,则确定所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的LB_Keogh下界距离;所述样本电流时间序列曲线经过预处理且携带有道岔转辙机的故障信息;所述当前最小DTW距离的初始值为无穷大;若判断获知所述LB_Keogh下界距离小于所述当前最小DTW距离,则计算所述样本电流时间序列曲线与所述待识别电流时间序列曲线之间的DTW距离;将所有DTW距离中最小DTW距离对应的样本电流时间序列曲线携带的故障信息作为所述待识别电流时间序列曲线对应的故障信息。
以上所描述的装置实施例仅仅是示意性的,其中所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。本领域普通技术人员在不付出创造性的劳动的情况下,即可以理解并实施。
通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到各实施方式可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件。基于这样的理解,上述技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存储在计算机可读存储介质中,如ROM/RAM、磁碟、光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行各个实施例或者实施例的某些部分所述的方法。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 道岔转辙机故障识别方法及装置
- 道岔转辙机故障预测方法、装置、电子设备和可读存储介质