微创手术机器人系统
文献发布时间:2023-06-19 09:55:50
技术领域
本发明涉及微创外科手术机器技术领域,具体而言,涉及一种微创手术机器人系统。
背景技术
参考申请公布号为CN109091237A、名称为微创手术器械辅助系统的中国发明专利申请,以腹腔镜为代表的微创外科被誉为20世纪医学科学对人类文明的重要贡献之一,微创手术操作是指医生利用细长的手术工具通过人体表面的微小切口探入到体内进行手术操作的。它与传统的开口手术相比具有手术切口小、出血量少、术后疤痕小、恢复时间快等优点,这使得病人遭受的痛苦大大减少;因此微创外科被广泛的应用于临床手术。
参考申请公布号为CN109091238A、名称为分体式微创手术器械辅助系统的中国发明专利申请,微创外科手术机器人系统包括医生操作台,外科医生通过操作医生机械臂来精准地控制患者操作台的器械机械臂上的一个或多个手术器械执行各种手术动作。
参考专利号为201921438964.9,名称为医生操作台的实用新型专利,现有的医生操作台在使用时,医生操作不轻便、灵活度低,容易疲劳。另外机械臂的转动关节体积较大,关节运动检测装置的测量精度低。
为适应手术室内紧凑空间的实际情况,以及微创手术切口位置的不确定性,与患者机械臂连接的患者操作台被动装置大多采用串联关节结构,以实现患者机械臂不动点空间位置的大范围调整。由于结构缺陷,目前的患者操作台被动装置普遍存在结构强度不足,锁紧间隙较大;机械臂调整不灵活,运动范围受限的缺点,为适应现代化微创手术的需要,需对患者机械臂的安装平台结构进行优化,以克服上述缺点。
发明内容
本发明就是为了解决现有微创手术机器人的医生操作台在使用时医生操作不轻便、灵活度低,容易疲劳,机械臂的转动关节体积较大,关节运动检测装置的测量精度低以及患者操作台的机械臂调整不灵活,运动范围受限技术问题,提供了一种使用更灵活,更轻便的关节运动参数测量更准确的,患者操作台的机械臂调整灵活,运动范围大的微创手术机器人系统。
本发明提供的微创手术机器人系统,包括医生操作台和患者操作台,所述医生操作台,包括基座、扶手、显示屏、左立柱、右立柱、左连接座、右连接座、左控制端操作臂、右控制端操作臂和触摸控制屏,扶手与基座的升降机构连接,触摸控制屏与扶手连接,左立柱、右立柱分别与基座连接,显示屏通过支架与左立柱连接,左连接座与左立柱的升降机构连接,右连接座与右立柱的升降机构连接,左控制端操作臂与左连接座连接,右控制端操作臂与右连接座连接;左控制端操作臂、右控制端操作臂对称布置;
右控制端操作臂和左控制端操作臂均包括第一关节臂、基座、转动连接座、第二关节臂、手腕、第一抱闸、第二抱闸、第一同步带轮、第二同步带轮、第三同步带轮、第四同步带轮、第五同步带轮、第六同步带轮、连接轴、第一编码器、第二编码器、第三编码器、第二关节轴、连杆座、扭簧;
第一抱闸与基座固定连接,第一同步带轮与基座固定连接,连接轴基座固定连接,第一关节臂与连接轴通过轴承转动连接;第一抱闸中抱闸轴的端部与第一关节臂固定连接,抱闸轴的中部通过轴承与基座连接;第一编码器与第一关节臂固定连接,第二同步带轮与第一编码器的转轴连接,第二同步带轮和第一同步带轮之间连接有同步带;
第二抱闸与转动连接座固定连接,第三同步带轮与转动连接座固定连接,转动连接座与第一关节臂通过轴承转动连接;第二抱闸的抱闸轴与第一关节臂固定连接,第二抱闸的抱闸轴的中部通过轴承与转动连接座连接;第二编码器与第一关节臂固定连接,第四同步带轮与第二编码器的转轴连接,第四同步带轮和第三同步带轮之间通过同步带连接;
第二关节轴与转动连接座固定连接,连杆座通过轴承与第二关节轴转动连接,第五同步带轮与第二关节轴固定连接,第三编码器与第二关节臂固定连接,第六同步带轮与第三编码器的转轴连接,第六同步带轮和第五同步带轮之间通过同步带连接;扭簧套在第二关节轴上,扭簧的一端与第二关节轴连接,扭簧的另一端与连杆座连接;第二关节臂与连杆座固定连接;
第二关节臂的前部向第一关节臂方向弯曲一定角度,手腕与第二关节臂的前部连接;
患者操作台包括远端被动调整装置、近端被动调整装置和机械臂,远端被动调整装置包括底座、升降立柱、大自转、横梁,升降立柱与底座连接,横梁通过大自转与升降立柱连接;横梁包括横梁固定端及横梁滑动端,横梁固定端与大自转相连并可随大自转转动,横梁滑动端通过直线模组与横梁固定端连接;近端被动调整装置包括小自转、末端升降装置、左侧器械被动臂和图像被动臂,小自转与横梁滑动端连接,所述末端升降装置与小自转连接;末端升降装置包括升降支架,升降支架连接有左侧升降装置、中间升降装置;左侧器械被动臂与左侧升降装置连接,图像被动臂与中间升降装置连接;机械臂包括左侧器械主动臂、图像主动臂,左侧器械主动臂与左侧器械被动臂相连,图像主动臂与图像被动臂相连;左侧器械主动臂相对于左侧器械被动臂倾斜布置,图像主动臂相对于图像被动臂倾斜布置。
优选地,手腕包括第一L形杆、第二L形杆、腕部固定连杆、开合机构、手柄、第一轴承、第二轴承、第三轴承、第一电机、第二电机、第三电机、第一同步带轮、第二同步带轮、同步带、第一锥齿轮、第二锥齿轮、第三锥齿轮、第四锥齿轮、第一连接轴、第二连接轴、第四轴承和第三连接轴;
第三连接轴与开合机构固定连接,第三连接轴的一端通过第一轴承与第一L形杆转动连接,第三连接轴的另一端通过第四轴承与手柄转动连接,第一连接轴与第一L形杆固定连接,第一连接轴通过第二轴承与第二L形杆转动连接,第二连接轴与第二L形杆固定连接,第二连接轴通过第三轴承与腕部固定连杆转动连接,第一电机与第一L形杆连接,第一同步带轮与第三连接轴固定连接,第二同步带轮与第一电机的输出轴固定连接,同步带连接于第一同步带轮和第二同步带轮之间,第二电机与第二L形杆连接,第二锥齿轮与第二电机的输出轴固定连接,第一锥齿轮与第一连接轴固定连接,第一锥齿轮与第二锥齿轮啮合,第三电与腕部固定连杆连接,第四锥齿轮与第三电机的输出轴固定连接,第三锥齿轮与第二连接轴固定连接,第三锥齿轮与第四锥齿轮啮合。
本发明的有益效果是,使医生操作更轻便、灵活,有效降低医生手术疲劳,保证手术质量。
控制端操作臂具有结构轻巧、易操纵,精度高,体积小,成本低的优势,可实时、准确地反馈机械臂关节运动参数,而且具有锁紧关节的功能。本发明尤其适用于低速、轻载的使用条件,如以主从跟随形式操纵的微创手术机器人的医生机械臂转动关节。
患者操作台的器械机械臂调整灵活,运动范围大。被动调整装置强度高,锁紧间隙小。
本发明进一步的特征,将在以下具体实施方式的描述中,得以清楚地记载。
附图说明
图1是微创手术机器人系统的结构示意图;
图2是医生操作台的结构示意图;
图3是右控制端操作臂的结构示意图;
图4是图3所示结构中,第一关节臂和基座之间的关节结构示意图;
图5是图3所示结构中,转动连接座与第一关节臂连接示意图;
图6是图3所示结构中,第二关节臂与转动连接座连接结构示意图;
图7是手腕的结构示意图;
图8是图7所示结构的剖视图;
图9是图7所示结构的剖视图;
图10是患者操作台的整体结构示意图;
图11是图10所示患者操作台的分解图;
图12是支撑柱的结构示意图;
图13是末端升降装置的结构示意图;
图14是图13所示末端升降装置中的左侧升降装置的结构示意图;
图15是图像被动臂的整体结构示意图;
图16是患者操作台进行手术操作时的状态示意图;
图17是小自转及其制动装置的结构示意图;
图18是图17所示结构的分解图;
图19是小自转的剖视图;
图20是制动组件的结构示意图;
图21是图20所示制动组件的爆炸图;
图22是左侧器械主动臂的结构示意图;
图23是左侧器械主动臂的支撑臂的结构示意图;
图24是左侧器械主动臂的L型杆、第一连杆、第二连杆折叠状态下的结构示意图;
图25是器械升降座的结构示意图;
图26是器械升降座中,主动齿轮与从动齿轮啮合的结构示意图;
图27是左侧器械主动臂的L型杆、第一连杆、第二连杆折叠状态下的结构示意图。
图中符号说明:
1.基座,2.第一关节臂,3.第二关节臂,4.手腕,5.转动连接座,6.第一抱闸,7.第二抱闸,8.连接轴,9.第一同步带轮,10.第二同步带轮,11.第一编码器,12.同步带,13.第二编码器,14.第三同步带轮,15.第四同步带轮,16.同步带,17.第二关节轴,18.连杆座,19.扭簧,20.轴承,21.第五同步带轮,22.第六同步带轮,23.第三编码器,24.同步带,25.锁止按钮,26.按钮架;28.第一转动轴线,29.第二转动轴线,30.第三转动轴线。
具体实施方式
以下参照附图,以具体实施例对本发明作进一步详细说明。
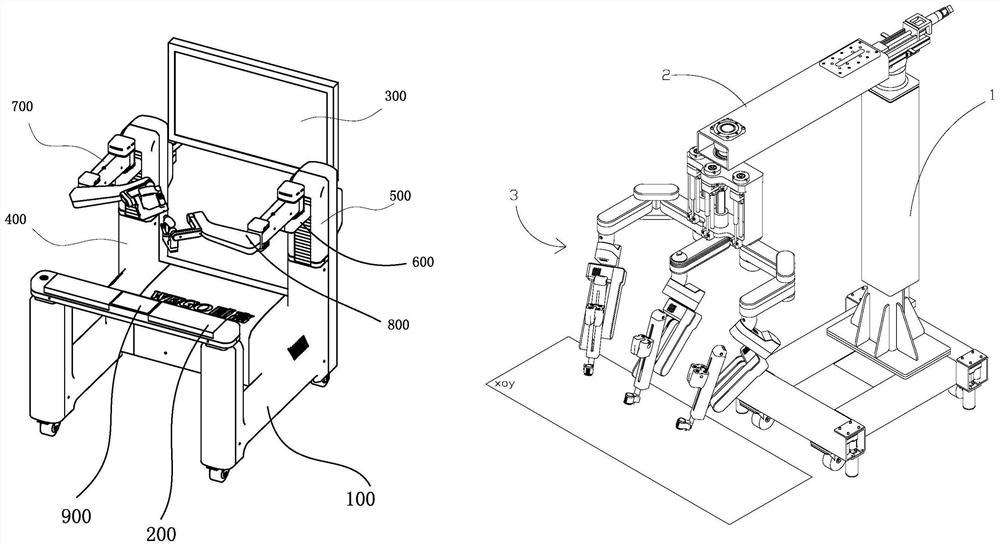
如图1所示,微创手术机器人系统包括医生操作台和患者操作台,本发明的微创手术机器人系统是主从跟踪模式,医生操作医生操作台使患者操作台上的器械被动臂动作进行手术。
如图2所示,医生操作台包括基座100、扶手200、显示屏300、左立柱400、右立柱500、左连接座、右连接座600、左控制端操作臂700、右控制端操作臂800、触摸控制屏900,扶手200与基座100的升降机构连接,触摸控制屏900与扶手200连接,左立柱400、右立柱500分别与基座100连接,显示屏300通过支架与左立柱400连接。左连接座与左立柱400的升降机构连接,右连接座600与右立柱500的升降机构连接,左控制端操作臂700与左连接座连接,右控制端操作臂800与右连接座600连接。左控制端操作臂700、右控制端操作臂800对称布置从而适应医生的左手、右手。
左控制端操作臂700和右控制端操作臂800的结构相同。
如图3所示的右控制端操作臂,第一关节臂2的后端与基座1通过关节连接,第一关节臂2能够以第一转动轴线28在水平面上转动,第二关节臂3与转动连接座5通过关节连接,第二关节臂3能够以第三转动轴线30在垂直面上转动,转动连接座5与第一关节臂2的前端通过关节连接,转动连接座5能够以第二转动轴线29在水平面上转动。手腕4与第二关节臂3连接。第三转动轴线30与重力方向垂直。第一转动轴线28、第二转动轴线29与地面垂直,避免机械臂重力对医生手臂的影响,使医生操作更轻便、灵活,有效降低医生手术疲劳,保证手术质量。
如图4所示的第一关节臂和基座之间的关节结构,通过螺钉将第一抱闸6固定安装在基座1上,第一同步带轮9与基座1固定连接,连接轴8通过螺钉与基座1固定连接,第一关节臂2与连接轴8通过轴承转动连接,第一关节臂2转动时,连接轴8不动,第一关节臂2绕连接轴8水平旋转。第一抱闸6的抱闸轴6-1的端部与第一关节臂2通过螺钉固定连接,抱闸轴的中部通过轴承与基座1连接。第一编码器11固定安装在第一关节臂2上,第二同步带轮10与第一编码器11的转轴连接,同步带12连接于第二同步带轮10和第一同步带轮9之间。第一抱闸6设有抱闸块和轴孔,抱闸轴的下部分设于抱闸的轴孔中,并通过平键与抱闸块相连,断电状态下,抱闸块被抱紧,抱闸轴被锁紧而不能转动;通电状态下,抱闸块被释放,抱闸轴能够在下轴承的支撑下转动。当第一关节臂2转动时,抱闸轴随之转动,同步带12带动第二同步带轮10转动,第一编码器11产生信号。抱闸主要作用是在不需要第一关节臂2转动动作的时候将第一关节臂2锁死。
连接轴8可以被安装在手术机器人系统的某个支架上。连接轴8与左连接座固定连接。
如图5所示,通过螺钉将第二抱闸7固定安装在转动连接座5上,第三同步带轮14与转动连接座5固定连接,转动连接座5与第一关节臂2通过轴承转动连接。第二抱闸7的抱闸轴与第一关节臂2通过螺钉固定连接,抱闸轴的中部通过轴承与转动连接座5连接。第二编码器13固定安装在第一关节臂2上,第四同步带轮15与第二编码器13的转轴连接,同步带16连接于第四同步带轮15和第三同步带轮14之间。当第一关节臂2静止不动,转动连接座5转动时,第二编码器13产生信号。
如图5和6所示,第二关节轴17通过螺钉与转动连接座5固定连接,连杆座18通过轴承20与第二关节轴17转动连接,第五同步带轮21与第二关节轴17固定连接,第三编码器23与第二关节臂3固定连接,第六同步带轮22与第三编码器23的转轴连接,同步带14连接于第六同步带轮22和第五同步带轮21之间。扭簧19套在第二关节轴17上,扭簧19的一端与第二关节轴17连接,扭簧19的另一端与连杆座18连接。第二关节臂3与连杆座18固定连接。通过扭簧19来使第二关节臂3形成平衡力矩,当无人为外力的情况下,第二关节臂3可以在水平方向上保持水平。
第二关节臂3并不是直线型臂,第二关节臂3的前部3-1向第一关节臂2方向弯曲一定角度,第二关节臂3的前部3-1与后部3-2之间存在110-145°的夹角。手腕4与第二关节臂3的前部3-1连接。第二关节臂3的前部3-1弯曲主要是考虑到申请公布号为CN110403700A发明申请中的医生机械臂的不足,现有技术医生机械臂中的第二臂杆604是直线设计,医生手握手腕4时,手与第二臂杆604几乎呈垂直关系,医生的手和小臂不在同一直线上,致使医生的手与小臂始终处于紧绷状态,医生长时间操作设备时会产生疲劳感。本次发明中,医生握住手腕4时,医生的手与小臂呈一条直线状态,可轻松转动第二关节臂3沿第三转动轴线30转动,不会因手与小臂的角度问题产生不必要的疲劳感,能大大增加手术过程中的安全性与手术精准性。
锁止按钮25通过按钮架26安装在第一关节臂2上,锁止按钮25与主控电路板连接,当操作者用手指按下锁止按钮25时控制手臂整体升降,连接轴8安装在操作台立柱升降基座上,当按下锁止按钮25时,立柱花键轴抱闸松开,此时可手动调整手臂整体的高度位置,当松开锁止按钮25时,抱闸闭合,此时手臂在垂直方向被锁止。
手腕4的具体结构可以采用现有技术,比如专利号为201720723942.1,名称为“一种主手手腕”的实用新型专利中公开的结构。手腕4也可以采用以下结构:
如图7-9所示,手腕4包括第一L形杆401、第二L形杆402、腕部固定连杆403、开合机构404、手柄405、第一轴承406、第二轴承407、第三轴承408、第一电机409、第二电机410、第三电机411、第一同步带轮412、第二同步带轮413、同步带414、张紧轮415、第一锥齿轮416、第二锥齿轮417、第三锥齿轮418、第四锥齿轮419、第一连接轴420、第二连接轴421、第四轴承422、第三连接轴423、切换按钮424。
第三连接轴423与开合机构404固定连接,第三连接轴423的一端通过第一轴承406与第一L形杆401转动连接,第三连接轴423的另一端通过第四轴承422与手柄405转动连接,第一连接轴420与第一L形杆401固定连接,第一连接轴420通过第二轴承407与第二L形杆402转动连接,第二连接轴421与第二L形杆402固定连接,第二连接轴421通过第三轴承408与腕部固定连杆403转动连接,第一电机409固定安装在第一L形杆401上,第一同步带轮412与第三连接轴423固定连接,第二同步带轮413与第一电机409的输出轴固定连接,同步带414连接于第一同步带轮412和第二同步带轮413之间,张紧轮415与第一L形杆401连接,同步带414绕过张紧轮415;第二电机410固定安装在第二L形杆402上,第二锥齿轮417与第二电机410的输出轴固定连接,第一锥齿轮416与第一连接轴420固定连接,第一锥齿轮416与第二锥齿轮417啮合,第三电机411固定安装在腕部固定连杆403上,第四锥齿轮419与第三电机411的输出轴固定连接,第三锥齿轮418与第二连接轴421固定连接,第三锥齿轮418与第四锥齿轮419啮合。腕部固定连杆403固定安装在第二关节臂3的前部3-1。
手柄405使用专利号为201921430578.5的实用新型专利中的握手1412的结构即可。手柄405设有按钮开关405-1。该按钮开关405-1用于控制微创手术机器人系统主从手连接关系,当医生手握住手柄405,中指无名指小拇指扣住按钮开关405-1,按下按钮时,接通相应电路,控制端操作臂和手术机器人系统的从机械臂连接关系成立,医生操作控制端操作臂运动时,患者操作台的从机械臂随之动作,当松开按钮开关405-1时,医生操作控制端操作臂动作,从机械臂(即器械机械臂)不跟随运动。
切换按钮424与手柄405的端部连接。切换按钮424的作用是切换手术机器人两种不同用途的从机械臂,实现一只手随时控制两种不同用途的从机械臂。
开合机构404采用专利号为201922031109.2的实用新型专利中的开合部件150的结构即可。
当医生手握住手柄405,拇指和食指捏住开合机构404的两个开合瓣,然后旋转整个开合机构404(开合机构404以第一旋转轴线4011旋转),第三连接轴423转动通过同步带机构使第一电机409的输出轴转动,第一电机409产生信号并反馈给手术机器人的控制系统。
当医生手握住手柄405,并使第一L形杆401以第二旋转轴线4021转动,第二电机410产生信号并反馈给手术机器人的控制系统。
当医生手握住手柄405,并使第二L形杆402以第三旋转轴线4031转动,第三电机411产生信号并反馈给手术机器人的控制系统。
手腕根据人体工学的设计理念,改变现有技术中90°垂直的把握方式,改为110-145°的角度更贴合人体手腕部的运动轨迹,使医生操作时,可以减轻手腕结构反馈给医生的操作滞涩感,操作更灵活,更方便,提高舒适感,保证手术质量。
手术过程中,医生坐在医生操作台前方,头戴3D眼镜观看显示屏,医生的手臂放置在扶手上,双手握住手腕,操控左右机械臂进行各种手术操作。扶手的高度可以通过升降机构单独调整(比如采用电动推杆、气弹簧等),以适应不同医生的操作要求。医生机械臂的高度也可以通过相应升降机构单独调整,以适应不同医生的操作要求,并防止手术过程中两个医生机械臂的干涉或运动范围超出工作空间。
如图10及图11所示,为适应手术室内紧凑环境的现实情况,患者操作台整体采用悬吊式布局,其整体结构主要由远端被动调整装置1、近端被动调整装置2及机械臂3三部分组成。机械臂3与近端被动调整装置2相连,并位于手术区域上方,手术前使用者可以根据病人手术部位的不同而在局部范围内灵活调整机械臂位置。为降低手术区域的污染风险及便于医生安装无菌套袋、手术器械,远端被动调整装置与近端被动调整装置间隔距离较远,并可在使用者的操作下实现机械臂在大范围空间内的位置调整与锁定。手术前,通过对远端被动调整装置1、近端被动调整装置2的设置,可以顺利实现患者机械臂不同点空间位置的确定。
远端被动调整装置1由一系列移动及转动关节串联组成,其整体结构包括底座1.1、升降立柱1.2、大自转1.3、横梁1.4。底座1.1可以实现患者操作台整体的移动及位置锁定。升降立柱1.2包括支撑柱1.2.1及移动筒1.2.2,其中支撑柱1.2.1与底座1.1通过紧固件固定安装,并可随底座一起移动。支撑柱1.2.1的结构如图12所示,主要由立柱焊件1.2.1.1、直线模组1.2.1.2及升降电机1.2.1.3三部分组成,立柱焊件1.2.1.1通过紧固件与直线模组1.2.1.2及底座固定相连,升降电机1.2.1.3与直线模组1.2.1.2的丝杠相连,并可驱动直线模组的滑块沿轴线一1-1的方向往复移动。移动筒1.2.2通过紧固件与直线模组的滑块相连,并可在升降电机的带动下随直线模组的滑块一起沿轴线一1-1往复移动,进而实现患者操作台机械臂3及近端被动调整装置2整体高度的调整。
大自转1.3通过紧固件与横梁1.4相连,大自转1.3与移动筒1.2.2顶端连接并可手动实现绕轴线一1-1的转动及锁紧,其结构具有锁紧力矩大、间隙小的优点,可以有效保证机械臂手术过程中的位置精度。大自转1.3是关节作用。
横梁1.4包括横梁固定端1.4.1及横梁滑动端1.4.2,其中横梁固定端1.4.1与大自转1.3固定相连,并可随大自转一起绕轴线一1-1转动。横梁固定端1.4.1主要由横梁焊件1.4.1.1、直线模组1.4.1.2及横梁移动电机1.4.1.3三部分组成,横梁焊件1.4.1.1通过紧固件与直线模组及大自转3固定相连,横梁移动电机1.4.1.3与直线模组1.4.1.2的丝杠相连并可驱动直线模组1.4.1.2的滑块沿轴线2-1的方向往复移动。横梁滑动端1.4.2通过紧固件与直线模组1.4.1.2的滑块相连,并可在横梁移动电机1.4.1.3的带动下随直线模组滑块一起沿轴线2-1往复移动,进而实现患者操作台机械臂及近端被动调整装置水平方向的尺寸调整。
由底座1.1、升降立柱1.2、大自转1.3、横梁1.4构成的远端被动调整装置具有结构强度高,调整灵活、范围大的优点。其不仅可以在手术室内实现机械臂及近端被动调整装置大范围的移动,还可以通过调整各关节位置,使设备的体积最小化,重心降至最低以便于设备运输稳定。
近端被动调整装置2同样由一系列移动及转动关节组成,其整体结构包括小自转1.5、末端升降装置1.6、左侧器械被动臂1.7、右侧器械被动臂1.8及图像被动臂1.9,其中小自转1.5通过紧固件与横梁滑动端1.4.2固定连接,末端升降装置1.6与小自转1.5连接,小自转1.5可随横梁滑动端1.4.2一起沿轴线2-1方向往复移动。近端被动调整装置2整体可绕轴线三3-1在限定角度范围内转动并通过小自转1.5锁定。
末端升降装置1.6由三组相互独立的具有重力平衡功能的升降装置并联构成,分别是左侧升降装置1.6.1、右侧器械被动臂1.8、中间升降装置1.6.3,其中左侧器械被动臂1.7与左侧升降装置1.6.1的花键轴固定连接,右侧器械被动臂1.8与右侧升降装置1.6.2的花键轴固定连接,图像被动臂1.9与中间升降装置1.6.3的花键轴固定连接,以实现机械臂相互独立的垂直于xoy平面的升降运动,进而在高度方向对不动点位置进行调整。左侧升降装置1.6.1、右侧器械被动臂1.8和中间升降装置1.6.3这三组升降装置的结构相同,每组升降装置的具体结构如图14所示,抱闸1.6.12通过紧固件与升降支架1.6.4固定安装;花键1.6.5包括花键轴1.6.5.1及花键座1.6.5.2,花键座1.6.5.2通过紧固件与升降支架1.6.4固定安装,花键轴1.6.5.1可沿轴线四3-2往复移动;滚珠丝杠1.6.7包括丝杠螺母1.6.7.1及丝杠杆1.6.7.2,丝杠杆1.6.7.2通过角接触球轴承1.6.9及轴承压盖1.6.10与升降支架1.6.4安装,并通过抱闸块1.6.11与抱闸连接,以实现转动及制动功能。丝杠螺母1.6.7.1通过连接座1.6.6与花键轴1.6.5.1连接,并可随花键轴的移动实现丝杠螺母在丝杠杆上的移动,进而实现丝杆杆的转动。连接座1.6.6另一端安装有气弹簧1.6.8,对升降装置进行重力平衡,气弹簧1.6.8的输出端与升降支架1.6.4连接。
左侧器械被动臂1.7和右侧器械被动臂1.8采用现有技术中的常规结构即可,比如可以采用专利号为201922030990.4、名称为一种平移机械臂的实用新型专利所公开的结构。
左侧器械主动臂1.10及右侧器械主动臂1.12分别与左侧器械被动臂1.7及右侧器械被动臂1.8与相连,以实现器械主动臂相互独立的平行于xoy平面的平移运动,进而在水平方向对其不动点位置进行调整。
图像被动臂1.9位于左侧器械被动臂及右侧器械被动臂中间位置,并与图像主动臂1.11相连。为适应微创手术操作区域的狭小空间,以及尽量避免机械臂在手术过程中相互碰撞,图像被动臂1.9与中间升降装置1.6.3的花键轴固定安装,仅能实现垂直于xoy平面的升降运动,而不能实现平行于xoy平面的平移运动。图像被动臂1.9的整体结构如图15所示,连杆1.9.1与连接座1.9.2通过紧固件安装至一起,连接座1.9.2与图像主动臂1.11连接,连杆1.9.1的端部与中间升降装置的花键轴1.6.5.1相连,连杆1.9.1上部及侧面安装有方向开关1.9.3及按钮开关1.9.4,其中按钮开关可以同时控制大自转1.3、1.6.3中间升降装置的抱闸及1.5小自转关节的电动推杆,以实现大自转关节绕轴线一1-1、图像被动臂沿轴线四3-2及小自转关节绕轴线三3-1的运动与锁紧。方向开关则通过控制横梁移动电机1.4.1.3的正反转实现横梁滑动端1.4.2沿轴线2-1的往复运动。
图像主动臂1.11整体倾斜布置,与图像被动臂1.9之间存在小于90°的夹角。相应地,左侧器械主动臂1.10也倾斜布置,左侧器械主动臂1.10与左侧器械被动臂1.7所在平面之间存在小于90°的夹角。相应地,右侧器械主动臂1.12也倾斜布置,右侧器械主动臂1.12与右侧器械被动臂1.8所在平面存在小于90°的夹角。
在实际使用过程中,为避免误碰,操作者需同时控制按钮开关1.9.4及方向开关1.9.3,并辅助手动操作,先将图像主动臂1.11的不动点位置与患者切口部位重合,然后再通过手动调整左侧升降装置1.6.1、右侧升降装置1.6.2、左侧器械被动臂1.7、右侧器械被动臂1.8以将左侧器械主动臂1.10的不动点位置及右侧器械主动臂1.12的不动点位置与患者其他切口部位重合,进而快速有效的实现机械臂的空间定位。
如图16所示,是患者操作台进行手术操作时的状态示意图。在手术开始前,通过对远端被动调整装置1及近端被动调整装置2的手动操作,使分别附接在左侧器械主动臂1.10、图像主动臂1.11及右侧器械主动臂1.12的穿刺器与患者切口部位重合,以实现各机械臂不动点空间位置的确定。在实际手术过程中,左/右器械主动臂与图像主动臂间自然呈一定的夹角α及γ,以满足医生操控机械臂对患者进行微创手术操作的需求。因此手术开始前,操作者还需调整机械臂各关节的相对位置,确定机械臂的初始姿态,以使穿刺器刺入病人手术切口的方向处于合理角度,便于医生操作。
由于机械臂本身结构限制,各关节的转动角度只能限定在一定范围,为满足手术过程中手术器械相对患者手术切口位置(不动点位置)的运动空间需求,操作者调整机械臂初始姿态时,各关节的锁定位置应尽可能处于其转动范围的中间位置。为尽可能满足这一需求,在图像主动臂与图像被动臂间设置夹角θ,使图像主动臂不动点位置抬高并前伸,左/右器械主动臂与被动臂间同样设置夹角θ及β,使器械主动臂不动点位置抬高、前伸,并靠近图像主动臂的不动点。通过这种设计,当机械臂各关节处于转动范围的中间位置时,各机械臂的姿态及相互位置基本满足操作者的需求,以减少关节调整量,进而达到扩大机械臂相对患者手术切口位置运动范围的目的。
如图17-21所示,小自转1.5通过四个螺钉5安装在横梁滑动端1.4.2横梁滑动端1.4.2上;制动组件3通过螺钉安装在横梁滑动端1.4.2上,电动推杆组件4通过螺钉7安装在横梁滑动端1.4.2横梁滑动端1.4.2上。小自转1.5包括支撑座8、转轴9、轴承垫片10、锁紧螺母11、轴承压盖12、深沟球轴承14以及成对安装的两个圆锥滚子轴承13。支撑座8通过螺钉5与横梁滑动端1.4.2固定连接。深沟球轴承14与转轴9的下部连接,深沟球轴承14的外圈与横梁滑动端1.4.2配合。两个圆锥滚子轴承13套在转轴9的上部,轴承垫片10套在转轴9的上部,轴承垫片10位于两个圆锥滚子轴承13之间,圆锥滚子轴承13的外圈与支撑座8的内壁配合。轴承压盖12通过螺钉与支撑座8的顶部固定连接,轴承压盖12的下端下压圆锥滚子轴承13的外圈。锁紧螺母11与转轴9的上端连接。通过轴承压盖12及轴承垫片10对安装在其内部的圆锥滚子轴承外圈进行轴向定位。转轴9与圆锥滚子轴承13及深沟球轴承14内圈配合安装,并通过锁紧螺母11进行轴向定位。由此,当转轴组件安装在横梁滑动端1.4.2后,其内的转轴9可实现绕轴线的转动。制动组件3包括基座15、左制动片16、右制动片17、左侧推杆18、右侧推杆19及圆柱销20。左制动片16及右制动片17通过圆柱销与基座15固定连接。左侧推杆18通过圆柱销与左制动片16转动连接,右侧推杆19通过圆柱销20与右制动片17转动连接。左侧推杆18、右侧推杆19可分别绕轴线16-1、轴线17-1自由转动。左制动片16和右制动片17由弹性耐磨材料制成,受到外力后可以发生弹性变形,外力撤除,恢复原位。基座15上加工有螺纹孔,并通过螺钉6与横梁滑动端1.4.2安装至一起。左制动片16和右制动片17包围转轴9。电动推杆组件4包括左侧电动推杆21、右侧电动推杆22,左侧电动推杆21正对左侧推杆18,右侧电动推杆22正对右侧推杆19。将转轴9与升降支架1.6.4固定连接,当转轴9需要制动时,左侧电动推杆21及右侧电动推杆22同时伸出,推动制动组件3的左侧推杆18及右侧推杆19的后部,致使左制动片16、右制动片17发生弹性变形并抱紧转轴9,转轴9即被锁死(转轴9与两个制动片之间无相对运动)。由于电动推杆的伸缩行程很小,其完全伸出时间较短,因此可以在短时间内实现转轴的有效制动。当需解除制动时,控制左侧电动推杆21、右侧电动推杆22同时收回,左制动片16、右制动片17在自身弹性的作用下与转轴脱离,转轴9即可自由转动。
以左侧器械主动臂1.10为例,说明器械主动臂的一种具体实现结构:如图22-27所示,左侧器械主动臂1.10包括支撑臂A3、L型杆4、第一连杆5、第二连杆6、器械升降座7、快换装置8、戳卡9、穿刺器10。第一连杆5通过转动关节与L型杆4的下端连接,第二连杆6与通过转动关节与第一连杆5连接,器械升降座7通过转动关节与第二连杆6。器械升降座7上设有止动按钮7-11和指示灯7-12,此按钮可控制各关节处的电机抱闸,按下此按钮可手动移动各关节位置。指示灯7-12是可显示不同颜色的指示灯,操作者可通过不同颜色的指示灯,判断机械臂状态。支撑臂A3包括旋转基座A3-1、旋转驱动电机3-2、旋转轴3-3、第一锥齿轮3-4、第二锥齿轮3-5,旋转驱动电机3-2固定安装在旋转基座A3-1上,旋转轴3-3通过轴承与旋转基座A3-1转动连接,第一锥齿轮3-4与旋转轴3-3固定连接,第二锥齿轮3-5与旋转驱动电机3-2的输出轴固定连接,第二锥齿轮3-5与第一锥齿轮3-4啮合。旋转驱动电机3-2工作可驱动旋转轴3-3绕轴线一3-6方向旋转。L型杆4与旋转轴3-3固定连接。连杆驱动电机4-1固定在L型杆上,驱动轮4-2通过螺钉固定在驱动轮轴4-3上(驱动轮轴4-3与连杆驱动电机4-1的输出轴固定连接),钢丝4-4绕过驱动轮4-2和从动轮4-5,从动轮4-5通过紧定螺钉固定在关节的从动轮轴上,从动轮轴的另一端也固定有从动轮,使得连杆驱动电机4-1动作可带动第一连杆5绕轴线二4-6转动。第二连杆6和第一连杆5之间也通过上述钢丝绳传动机构连接,第二连杆6能够绕轴线三5-3转动。器械升降座7与第二连杆6之间也通过上述钢丝绳传动机构连接,器械升降座7能够绕轴线四6-4转动。连杆驱动电机4-1动作通过传动机构使第一连杆5绕轴线二4-6转动,同时第二连杆6绕轴线三5-3转动,同时器械升降座7绕轴线四6-4转动,从而实现第一连杆5、第二连杆6和器械升降座7的伸展或折叠,传动机构可以采用专利号为201711314225.4的发明专利中附图17中的同步带传动机构。器械升降座7的结构,滑轨组件7-2通过螺钉安装在基座7-1上上,丝杠7-3两端通过轴承与基座7-1连接,丝杠螺母7-4与丝杠7-3连接,丝杠螺母7-4通过支撑架与滑轨组件7-2的滑块连接,器械升降座7底部固定安装有电机,电机的输出轴连接有主动齿轮7-5,从动齿轮7-6与丝杠7-3固定连接,主动齿轮7-5与从动齿轮7-6啮合,电机转动可带动丝杠转动,从而使沿着快换装置8的长度方向移动。快换装置8通过支架与器械升降座7的丝杆螺母7-4固定连接,快换装置用于安装手术器械,手术器械的器械杆穿过穿刺器10,戳卡9与器械升降座7连接,穿刺器10安装在戳卡9上。快换装置8采用专利号为201922031305.X的实用新型专利中公开的结构即可。此手术器械机械臂改变传统的全横向折叠式的设计,器械升降座7前置,器械升降座7位于第二连杆6的内侧,节省了横向空间,将快换关节相对独立于机械臂整体,使得术中更换手术器械时,更换者有更充足的空间进行操作,保证操作的便捷性,快速性。参考图24和27,当第一连杆5、第二连杆6和器械升降座7折叠起来时,L型杆4、第一连杆5、第二连杆6三者位于同一平面,器械升降座7不在该平面内,器械升降座7与该平面不平行而是存在一定的夹角。参考图22,当第一连杆5、第二连杆6和器械升降座7伸展时(向图22中右下角方向运动),第一连杆5相对于L型杆4顺时针方向转动,第二连杆6相对于第一连杆5逆时针方向转动,器械升降座7相对于第二连杆6顺时针方向转动。相反地,当第一连杆5、第二连杆6和器械升降座7折叠时,第一连杆5相对于L型杆4逆时针方向转动,第二连杆6相对于第一连杆5顺时针方向转动,器械升降座7相对于第二连杆6逆时针方向转动。
- 一种新型微创手术机器人系统用微创手术工具
- 微创手术机器人用隔离结构及微创手术机器人