一种智能割草机系统
文献发布时间:2023-06-19 10:11:51
技术领域
本发明涉及农业机械领域,特别涉及割草机。
背景技术
智能割草机应用越来越普遍,目前使用的智能割草机,如围线式割草机,虽然能实现自动割草,自动充电等功能,但其还存在的不足之处主要包括:
一、割草机本身,现有割草机的割草刀为盘式结构,一般适于较短的草的草坪作业,对于长草的割草效率较低;一般为单一割草,虽然有小部分割草机能实现施肥等功能,但其效果并不理想;
二、目前围线式割草机识别草坪边界的方法主要是利用电磁传感器实现的,电子围栏导线的两端连接在围线发射装置上,并发出特定频率的脉冲;导线上变化的电流产生磁场,割草机围线检测模块上的电感元器件受磁场影响将导致电压的变化,采集电感两端的电压确认围线磁场信号,从而确认草坪工作区域的范围。这种围线检测方案的缺点在于检测装置对发射脉冲的识别与跟踪易受场地环境本身磁场、以及周围其它围线的影响,若场地上存在高压线等因素导致的磁场干扰,或场地周围存在其它围线,将导致围线检测信号异常,发生出界等严重事故。
发明内容
针对现有技术中的缺陷,本发明的目的在于克服上述现有技术中的不足之处,解决现有割草机割草适应性不佳,效率低及割草机检测装置对发射脉冲的识别与跟踪易受干扰的问题,提出一种智能割草机系统,本发明提出的基于GNSS模块授时的围线方案直接识别相匹配的围线发射脉冲,抗干扰能力强,检测精度高。
为了达到上述技术目的,本发明提供了一种智能割草机系统,采取的技术方案为:一种智能割草机系统,包括割草机、用于草坪边界检测的围线装置及用于供所述割草机充电用的充电桩,所述围线装置包括安装于割草机上的围线检测装置、安装于草坪边界的与所述围线检测装置对应设置的围线发射装置,所述围线发射装置连接有围绕草坪边界设置的导线,所述导线围绕草坪边界形成电子围栏围线,导线围绕所述充电桩形成充电桩小圈围线;
所述割草机包括壳体、驱动装置、割草组件;所述割草组件包括割草轴、割草驱动装置、安装于所述割草轴上的割草刀片,割草驱动装置用于驱动所述割草轴,割草轴带动割草刀片对草坪进行割草作业;
所述割草组件还包括安装于割草轴外周的割草刀架体,所述割草刀架体内支撑安装有多根固定杆,所述固定杆上借助弹性导套活动安装有刀杆,所述刀杆可于割草刀架体上的导向孔中伸出,刀杆远离所述固定杆的一端安装所述割草刀片;割草机工作时,所述刀杆借助离心作用向所述导向孔外伸出,割草刀片进行割草作业;
所述割草机还包括靠近所述割草组件的、安装于所述壳体内的辅助平整装置,所述辅助平整装置包括平整驱动装置、平整割草装置,所述平整割草装置包括横置的平整驱动轴、围绕所述平整驱动轴固定的螺旋割草架,所述螺旋割草架上隔开安装有平整刀片;
所述围线装置中,围线发射装置和围线检测装置上分别接有GNSS模块,所述GNSS模块提供特定频率的高精度授时。
进一步的,所述割草机的壳体中安装有施肥施水组件,所述施肥施水组件包括储料腔、与所述储料腔连通的施浇盒,所述施浇盒置于所述螺旋割草架的上方并底部设有漏料孔。
进一步的,所述割草机壳体中还安装有位于所述割草刀架体外周的内壳,所述割草轴穿过所述内壳的顶部与割草驱动装置连接。
进一步的,所述割草刀架体整体呈多边形架体结构,其底部斜板相对水平地面的夹角小于30°设置,顶部斜板相对水平地面夹角大于45°设置。
进一步的,所述围线发射装置发射围线脉冲的同时,所述围线检测装置开启磁场检测窗口,实现围线发射装置与围线检测装置之间的时间同步,包括以下步骤:
步骤1:围线发射装置与围线检测装置上GNSS模块的PPS引脚分别产生相同周期T、相同脉冲宽度的授时脉冲信号,围线发射装置与围线检测装置将在同一时刻检测到PPS上升沿/下降沿,不同GNSS模块之间的授时脉冲信号偏移小于100ns;
步骤2:PPS的高精度特性,使得围线发射装置与围线检测装置的时间差保持在100ns以内,在围线发射装置产生脉冲的同时,围线检测装置的磁场检测窗口开启,采集电压变化信号,获取围线强度:
步骤201:t
步骤202:同在t
步骤203:从t
步骤204:脉冲时段内的电压均值减去无脉冲时段内的噪底,即为当前周期内的围线检测强度:V=V
进一步的,所述围线发射装置在PPS上升沿/下降沿的δt后产生宽度为τ的脉冲,包括:
在一个PPS脉冲周期T内,围线发射装置和围线检测装置中的单片机系统时钟相差低于us级别,从PPS上升沿/下降沿触发起,围线发射装置上的单片机和围线检测装置上的单片机分别依靠系统定时器,等待δt的时间后,分别进行发射脉冲的产生与磁场检测窗口的开启。
进一步的,利用GNSS模块授时将相邻围线装置的脉冲发射/检测时机错开,包括:延时δt是可配置的,若围线发射装置产生脉冲的延时δt
进一步的,模块授时为围线发射装置上的充电桩小圈围线提供时标,将电子围栏围线和充电桩小圈围线的发射/检测时机错开,包括:可配置的延时δt为围线发射装置上的多个围线提供不同的脉冲时标,割草机的充电桩位于草坪电子围栏的边界上,为标记充电桩所处位置,充电桩小圈围线的脉冲发射、检测时机与草坪电子围栏围线的脉冲发射、检测时机错开,当割草机上的围线检测装置靠近围线发射信号的范围内时,割草机能知晓充电桩所处位置,并进行相应处理。
进一步的,所述步骤203围线强度检测的噪底,是在与围线脉冲发射互斥的一段时间内对磁场强度信号的采集,噪底的获取是为了确认无围线脉冲时的周围环境的磁场强度,步骤202采集到的围线磁场强度减去步骤203无围线脉冲时的磁场强度能降低周围磁场对围线检测效果的影响。
进一步的,可配置的延时δt为围线检测装置上的多个磁场检测传感器提供不同的检测开启时标:
割草机上装有2~3个电感,用于检测小车不同部位相对于围线的位置:包括左侧电感、右侧电感、以及可选的中间电感,其中左、右侧电感分别处于割草机小车中线的两侧,中间电感接近于小车中线,在一个检测周期内,约定延时δt分别为δt
本发明的割草机相比现有技术存在以下优点:
1、本发明的割草机的割草刀片安装于可伸缩的刀杆上,刀杆伸缩根据割草转速自由调节,可避免在割草阻力较大时刀杆折弯折断,刀片受损事故发生,延长割草机寿命;并采用多层割草刀结构,同时设置特殊多边形刀架体结构,实现高效割草;
2、本发明的割草刀组件,利用特定结构的刀架体结构与内壳结构,实现碎草的导流吸附切碎,利用上下多层割草刀结构,实现长草、碎草的充分快速切割,避免缠绕,保护机体;
3、本发明还设置的辅助平整装置,实现二次切割和精修整平作用,特别适用于要求较高的草坪修剪;采用螺旋式刀架结构,可深入草坪中修剪,其效果好,修剪时阻力小、效率高;还采用优化的管状刀架结构,能辅助施肥浇水,功能集成度高;
4、本发明还设置有施肥浇水组件,在辅助平整的同时,利用螺旋刀架的导流作用,将肥料及水均匀导入草坪底部,其效果极佳;
5、本发明提出的基于GNSS授时的围线发射与检测方法,基于GNSS高精度授时,围线发射装置和围线检测装置的时间同步误差低于us级别,约定在围线发射脉冲的同时,开启检测模块的磁场检测窗口;同时令周围的其余围线设备避开当前围线脉冲发射与检测窗口,解决周围围线设备的干扰问题;电子围栏围线和充电桩小圈围线的发射/检测窗口也相互避开,避免电子围栏围线和充电桩小圈围线之间的信号干扰。在无围线发射脉冲的时间内,开启检测装置的磁场检测窗口,获取空闲时段的磁场噪声,降低场地环境对围线检测效果的影响。
附图说明
图1为本发明整体框架示意图;
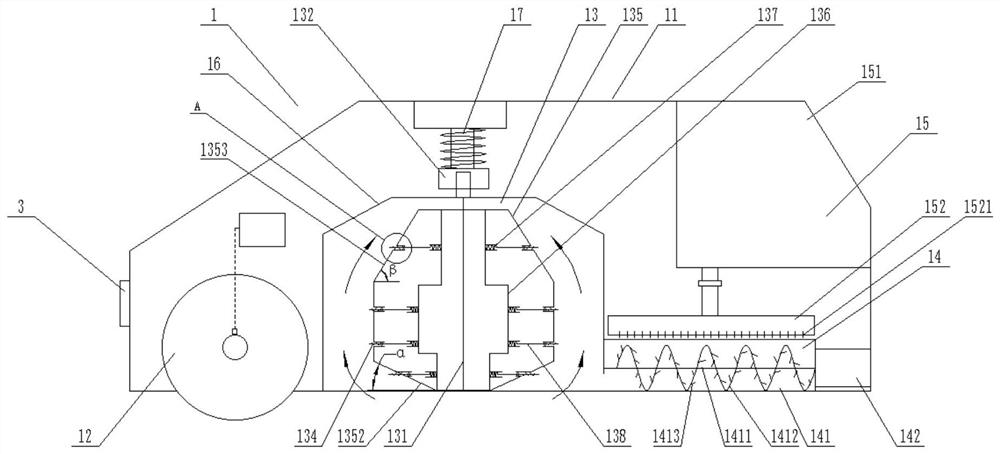
图2为本发明割草机的结构示意图;
图3为图2的A处局部放大图;
图4为本发明割草刀片的另一实施例示意图;
图5为本发明刀杆的安装局部示意图;
图6为本发明一实施例的螺旋割草架的局部示意图;
图7为本发明的整体控制部分示意图;
图8为本发明中说明书摘要示意图;
图9为不同GNSS模块授时的授时脉冲信号差异示意图;
图10为避开相邻围线脉冲示意图;
图11为充电桩小圈围线错开电子围栏围线脉冲时机示意图;
图12为割草机上多个电感元件开启磁场感应检测窗口示意图;
图13为具体实施例图。
具体实施方式
为使本发明的结构和优点更加清楚,下面将结合附图对本发明的结构作进一步的描述。
如图1-图7所示,为本发明智能割草机系统示意图。
本发明提供了一种智能割草机系统,包括割草机1、用于草坪边界检测的围线装置及用于供割草机充电用的充电桩2,围线装置包括安装于割草机上的围线检测装置3、安装于草坪边界的与围线检测装置3对应设置的围线发射装置4,围线发射装置4连接有围绕草坪边界设置的导线,导线围绕草坪边界形成电子围栏围线,导线围绕充电桩形成充电桩小圈围线;
如图2所示,割草机1包括壳体11、驱动装置12、割草组件13;割草组件13包括割草轴131、割草驱动装置132、安装于割草轴131上的割草刀片134,割草驱动装置132用于驱动割草轴131,割草轴131带动割草刀片134对草坪进行割草作业;本发明的割草机的驱动装置12为现有技术,故图中并未详细绘制出具体结构。为保护割草组件13,割草组件13通过缓冲结构17安装于壳体11中,缓冲结构17为常规结构,采用弹簧等缓冲件即可。
如图2、图3所示,割草组件13还包括安装于割草轴131外周的割草刀架体135,割草刀架体135内支撑安装有多根上下隔开设置的固定杆136,固定杆136上借助弹性导套137活动安装有刀杆138,刀杆138可于割草刀架体135上的导向孔1351中伸出,刀杆138远离固定杆136的一端安装割草刀片134;割草机1工作时,刀杆138借助离心作用向导向孔1351外伸出,割草刀片134进行割草作业;刀杆138与导向孔1351之间可通过直线轴承,或者普通的上下导轮导向即可。为实现高效割草,割草刀片134相对刀杆138的轴向倾斜设置,两者夹角为15-90°之间;作为优选,同一根刀杆138上,相邻割草刀片134与刀杆的夹角不一致设置,如图4所示。如图5所示,弹性导套137的示意图,其结构简单,在刀杆138的端部球连有一弹簧套1371,弹簧套1371的端部连接一弹簧即可,刀杆138与弹性导套137的套筒之间无需进行定向安装,刀杆138可在套筒内自由转动。割草机工作时,割草驱动装置132带动割草轴131高速转动,通过离心作用,刀杆138沿着导向孔1351向割草刀架体135外部伸出,刀杆138还能自转,实现高效割草;当遇到切割阻力较大的杂木等时,割草轴131的转动速度会相应降低,刀杆138适当回缩,以缩短与杂木接触的刀杆长度,实现对刀片及刀杆的保护,避免折断现象发生。
如图2所示,本发明的割草机1还包括靠近割草组件13的、安装于壳体11内的辅助平整装置14,辅助平整装置14包括平整驱动装置142、平整割草装置141,平整割草装置141包括横置的平整驱动轴1411、围绕平整驱动轴1411固定的螺旋割草架1412,螺旋割草架1412上隔开安装有平整刀片1413;辅助平整装置14用于对前端割草后进行精修处理,如对草坪进行整平,并且还能修剪余料,实现无残留修剪,配合前端效率更高。本发明螺旋割草架1412的结构,在本领域中属于首创。作为优选,本发明的平整刀片1413倾斜设置在螺旋割草刀架1412上,其切割效率高。
如图2所示,割草机1的壳体11中安装有施肥施水组件15,施肥施水组件15包括储料腔151、与储料腔151连通的施浇盒152,施浇盒152置于螺旋割草架1412的上方并底部设有漏料孔1521。对于割草后需要施肥的草坪,本发明使用时,在储料腔151中储存好肥料,可以是颗粒状或者液体均可,螺旋割草刀架1412旋转修整时,肥料从漏料孔1521中漏出,配合均匀的洒在草坪上。施浇盒152处还设置有电磁阀等,图中未画出。作为优选,为了更搞高校的施肥浇水等,如图6所示,本发明的螺旋割草刀架1412还可以是空心管结构并与平整驱动轴1411连通,螺旋割草刀架1412管壁上位于安装平整刀片的刀座1416处两侧设置有导流孔1414,导流作用如图6中箭头所示。储料腔151通过管道与平整驱动轴1411端部连通即可,由于这种连接结构为常规手段,故图中未具体示出。
割草机壳体11中还安装有位于割草刀架体135外周的内壳16,割草轴131穿过内壳16的顶部与割草驱动装置132连接。内壳16为带有下端开口的封闭结构,防止割草后碎草乱飞,并且,起到导流作用,如图2中的箭头所示,对于长草下方切割后导流至上方进行再次切碎,方便后期的收集,并且能防止缠绕,保护设备。
割草刀架体135整体呈多边形架体结构,其底部斜板1352相对水平地面的夹角α小于30°设置,顶部斜板1353相对水平地面夹角β大于45°设置。割草刀架体135的上下斜板设置,配合内壳16对碎草起到导向作用,整体上实现高效作业。
本发明中,为进一步提高作业的安全可靠性,在驱动装置12的驱动轴上安装有阻力传感器,阻力传感器与整机控制单元连接,控制单元用于对应与割草驱动装置控制器、驱动装置控制器、平整驱动装置控制器信号连接。当阻力传感器检测的阻力值大于设定的阈值时,控制单元向对应的控制器发送指令,降低各驱动装置驱动转速,实现实时调速调整。控制结构示意图如图7所示。
本发明的割草机系统的围线装置中,围线发射装置和围线检测装置上分别接有GNSS模块,所述GNSS模块提供特定频率的高精度授时。GNSS模块提供高精度的PPS授时脉冲信号,不同GNSS模块之间的授时脉冲信号偏移小于100ns。由GNSS模块提供高精度授时,围线发射装置和围线检测装置上分别接有GNSS模块,约定发射装置发射围线脉冲的同时,检测装置开启磁场检测窗口,实现发射装置与检测装置之间的时间同步;同时令周围的其余围线设备避开当前围线脉冲发射与检测窗口,解决周围围线设备的干扰问题;电子围栏围线和充电桩小圈围线的发射/检测窗口也相互避开,避免电子围栏围线和充电桩小圈围线之间的信号干扰。
围线发射装置与围线检测装置之间时间同步的实现,如图8所示,包括:
步骤1:围线发射与围线检测装置上GNSS模块的PPS引脚分别产生相同周期T、相同宽度的PPS授时脉冲信号,发射装置与检测装置将在同一时刻(时间误差ε
步骤2:PPS的高精度特性,使得围线发射装置与围线检测装置的时间差保持在100ns以内,在一个PPS脉冲周期T内,围线发射装置和围线检测装置中的单片机系统时钟相差低于us级别,从PPS上升沿/下降沿触发起,发射装置上的单片机和检测装置上的单片机分别依靠系统定时器,等待δt的时间后,分别进行发射脉冲的产生与检测窗口的开启,在发射装置产生脉冲的同时,检测装置的磁场检测窗口开启,采集电压变化信号,获取围线强度:
步骤201:t
步骤202:同在t
步骤203:从t
步骤204:脉冲时段内的电压均值减去无脉冲时段内的噪底,即为当前周期内的围线检测强度:V=V
上述步骤2中所述的延时δt是可配置的,若围线发射装置产生脉冲的延时δt
此外,可配置的δt为发射装置上的多个围线提供不同的脉冲时标:割草机的充电桩位于草坪电子围栏的边界上,为标记充电桩所处位置,同时防止割草机冲撞爬上充电桩,为充电桩圈一个小围线,小圈围线的脉冲发射、检测时机与草坪电子围栏的脉冲发射、检测时机错开,在一个围线检测周期内分别获取电子围栏和充电桩小圈围线的磁场强度,当割草机上的围线检测装置靠近围线发射信号的范围内时,割草机能知晓充电桩所处位置,并进行相应处理。如图11所示,t
同时,可配置的δt为检测装置上的多个磁场检测传感器提供不同的检测开启时标:为更准确地确定小车相对于围线的位置关系,通常割草机上装有2~3个电感,用于检测小车不同部位相对于围线的位置:包括左侧电感、右侧电感、以及可选的中间电感,其中左、右侧电感分别处于小车中线的两侧,中间电感接近于小车中线,在一个检测周期内,约定延时δt分别为δt
上述步骤203所述的围线强度检测噪底,是在与围线脉冲发射互斥的一段时间内对磁场强度信号的采集,噪底的获取是为了确认无围线脉冲时的周围环境的磁场强度,步骤202采集到的围线磁场强度减去步骤203无围线脉冲时的磁场强度能降低周围磁场对围线检测效果的影响。GNSS模块提供特定频率的PPS授时脉冲信号,不同GNSS模块之间的脉冲偏移小于100ns。由GNSS模块提供高精度授时,围线发射装置和围线检测装置上分别接有GNSS模块,约定发射装置发射围线脉冲的同时,检测装置开启磁场检测窗口,实现发射装置与检测装置之间的时间同步。假设两套围线发射/接收装置的延时δt不同,则可实现不同围线之间的抗干扰能力,同时电子围栏围线和充电桩小圈围线的发射/检测窗口也相互避开,避免电子围栏围线和充电桩小圈围线之间的信号干扰。如图13所示,具体步骤包括:
步骤1:围线发射与围线检测装置上GNSS模块的PPS引脚分别产生相同周期T、相同宽度的PPS授时脉冲信号,发射装置与检测装置将在同一时刻检测到PPS上升沿/下降沿;
步骤2:PPS的高精度特性,使得围线发射装置与围线检测装置的时间差保持在100ns以内,在一个PPS脉冲周期T内,围线发射装置和围线检测装置中的单片机系统时钟相差低于us级别,从PPS上升沿/下降沿触发起,发射装置上的单片机和检测装置上的单片机分别依靠系统定时器,等待δt的时间后,分别进行脉冲的产生与检测窗口的开启,在发射装置产生脉冲的同时,检测装置的磁场检测窗口开启,采集电压变化信号,获取围线强度:
步骤201:围线发射装置1、2和围线检测装置1、2同时在时段②的开始时间检测到PPS授时脉冲信号的上升沿,在上升沿触发之前,时段①内,开启围线检测装置1的电子围栏噪底检测窗口,获得时段①内的噪底信号V
步骤202:令围线发射/检测装置1的延时δt
步骤203:同在时段②内,围线检测装置1开启检测窗口,在该时段内,采集左侧电感、右侧电感和中间电感的电压信号V
步骤204:在时段③内,开启围线检测装置2的围线噪底检测窗口,获得时段③内的噪底信号V
步骤205:时段④内,开启围线发射装置2的围线脉冲发射,脉冲持续时间为τ;
步骤206:同在时段④内,围线检测装置2开启检测窗口,在该时段内,采集左侧电感、右侧电感和中间电感的电压信号V
步骤207:围线发射装置1、2和围线检测装置1、2同时在时段⑥的开始时间检测到PPS授时脉冲信号的下降沿,在下降沿触发之前,时段⑤内,开启围线检测装置1充电桩小圈围线的噪底检测窗口,获得时段⑤内的噪底信号V
步骤208:令围线发射/检测装置1的延时δt
步骤209:同在时段⑥内,围线检测装置1开启检测窗口,在该时段内,采集左侧电感、右侧电感和中间电感的电压信号V
步骤210:在时段⑦内,开启围线检测装置2的充电桩小圈围线噪底检测窗口,获得时段⑦内的噪底信号V
步骤211:时段⑧内,开启围线发射装置2的充电桩小圈围线脉冲发射,脉冲持续时间为τ;
步骤212:同在时段⑧内,围线检测装置2开启检测窗口,在该时段内,采集左侧电感、右侧电感和中间电感的电压信号V
本发明并不局限于上述实施例,在本发明公开的技术方案的基础上,本领域的技术人员根据所公开的技术内容,不需要创造性的劳动就可以对其中的一些技术特征作出一些替换和变形,这些替换和变形均在本发明保护范围内。
- 智能割草机的语音控制方法、装置、系统和智能割草机
- 智能割草机系统及智能割草机