一种巡逻车用路线循迹方法
文献发布时间:2023-06-19 10:44:55
技术领域
本发明涉及巡逻车用的路线循迹领域,特别是涉及一种巡逻车用路线循迹方法。
背景技术
随着社会的不断发展,越来越多的大型企业厂房使用自动巡逻车来替代人工巡逻,这样可以大幅提高巡检效率,但是由于不同场景情况不一样,所以就需要巡逻车事先对需要巡检的路段进行路线记忆,但是在进行记忆后,能否保证下次巡检时还是能够按照原来设定的路线进行运动,这个时候就需要对巡检过程当中的路线进行规划和校准,针对以上问题,申请人提出一种巡逻车用路线循迹方法。
发明内容
为了解决以上问题,本发明提供一种巡逻车用路线循迹方法,通过对巡逻车在已经设置完的运动路线上运动一个周期,然后对其运动周期中每一个路段运动过程中与原设定路线段的距离偏差进行分析,来对巡逻车的路线进行精确校准,为达此目的,本发明提供一种巡逻车用路线循迹方法,具体步骤如下:
步骤1:根据远程指令,加载对应路线问题,对路线文件进行解析处理;
步骤2:模拟车辆行驶轨迹,对路线可行性进行检查,满足行驶条件继续执行,不满足则返回错误;
步骤3:获取高精度定位数据,判断定位精度是否符合要求,符合要求继续执行,不符合则返回错误;
步骤4:将路线切割成若干个段,根据车辆实时位置查询当前车辆所在位置;
步骤5:通过遥控器控制车辆,在需要进行巡检的道路环境中,行驶一遍;
步骤6:根据车辆实时位置计算车辆与偏差值;
步骤7:根据车辆偏差值,计算出车辆应调整参数;
步骤8:根据雷达反馈,判断车辆周边状态;
步骤9:下发控制指令。
作为本发明进一步改进,步骤5具体内容如下:
公式y=k*log(tan(M_PI/4+lat/2)*pow((1-e*sin(lat)/(1+e*sin(lat)),e/2);),x=k*lon其中lat表示纬度和lon表示经度。
作为本发明进一步改进,步骤6具体内容如下:
通过车辆实时位置和航向,得出向量方程,根据两点得出路线中心线方程,(y-y2)/(y1-y2)=(x-x2)/(x1-x2)。对两个方程式的斜率求差,得出航向偏差值,点到直线的距离得出中心偏移距离。
作为本发明进一步改进,步骤7具体内容如下:
streering_angle=P*offset_distance+d*course_difference+i*sum(speed*offset*delta);
streering_angle表示应调节角度;
offset_distance表示距离偏差;
course_difference表示航向偏差;
最后加上累计偏差进行调节修正。
本发明一种巡逻车用路线循迹方法,根据远程指令,加载对应路线问题,对路线文件进行解析处理;模拟车辆行驶轨迹,对路线可行性进行检查;获取高精度定位数据,判断定位精度是否符合要求;将路线切割成若干个段;转换坐标系;根据车辆实时位置计算车辆与偏差值;通过车辆实时位置和航向,得出向量方程,对两个方程式的斜率求差,得出航向偏差值,点到直线的距离得出中心偏移距离;根据车辆偏差值,计算出车辆应调整参数,最后加上累计偏差进行调节修正;根据雷达反馈,判断车辆周边状态;下发控制指令,通过对路线文件进行解析处理,模拟车辆行驶轨迹,对路线可行性进行检查,最后再根据雷达反馈,判断车辆周边状态,下发控制指令。
附图说明
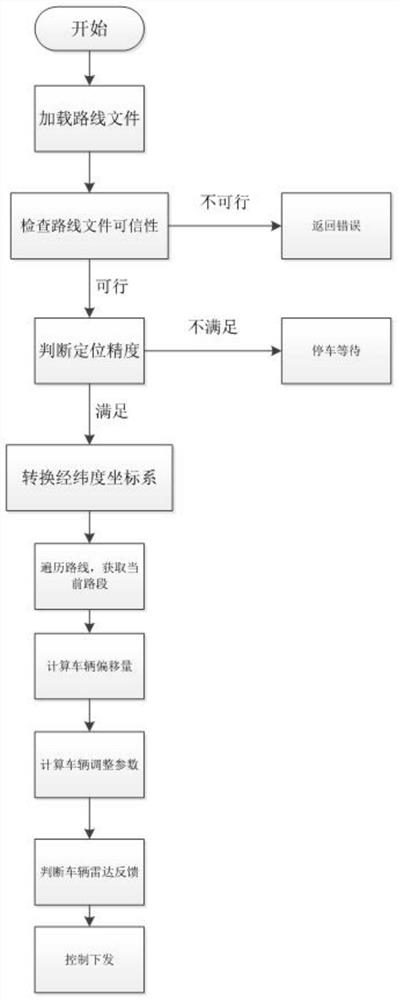
图1本申请整体流程示意图。
具体实施方式
下面结合附图与具体实施方式对本发明作进一步详细描述:
本发明提供一种巡逻车用路线循迹方法,通过对巡逻车在已经设置完的运动路线上运动一个周期,然后对其运动周期中每一个路段运动过程中与原设定路线段的距离偏差进行分析,来对巡逻车的路线进行精确校准。
作为本发明一种实施例,本申请提供如图1所示的一种巡逻车用路线循迹方法,具体步骤如下:
步骤1:根据远程指令,加载对应路线问题,对路线文件进行解析处理;
步骤2:模拟车辆行驶轨迹,对路线可行性进行检查,满足行驶条件继续执行,不满足则返回错误;
步骤3:获取高精度定位数据,判断定位精度是否符合要求,符合要求继续执行,不符合则返回错误;
步骤4:将路线切割成若干个段,根据车辆实时位置查询当前车辆所在位置;
步骤5:通过遥控器控制车辆,在需要进行巡检的道路环境中,行驶一遍;公式y=k*log(tan(M_PI/4+lat/2)*pow((1-e*sin(lat)/(1+e*sin(lat)),e/2);),x=k*lon其中lat表示纬度和lon表示经度;
步骤6:根据车辆实时位置计算车辆与偏差值;通过车辆实时位置和航向,得出向量方程,根据两点得出路线中心线方程,(y-y2)/(y1-y2)=(x-x2)/(x1-x2)。对两个方程式的斜率求差,得出航向偏差值,点到直线的距离得出中心偏移距离;
步骤7:根据车辆偏差值,计算出车辆应调整参数;streering_angle=P*offset_distance+d*course_difference+i*sum(speed*offset*delta);streering_angle表示应调节角度,offset_distance表示距离偏差,course_difference表示航向偏差,最后加上累计偏差进行调节修正;
步骤8:根据雷达反馈,判断车辆周边状态;
步骤9:下发控制指令。
以上所述,仅是本发明的较佳实施例而已,并非是对本发明作任何其他形式的限制,而依据本发明的技术实质所作的任何修改或等同变化,仍属于本发明所要求保护的范围。
- 一种巡逻车用路线循迹方法
- 一种基于改进极限学习机的巡逻车高精度循迹方法