一种无人车智能跟随调度系统
文献发布时间:2023-06-19 11:08:20
技术领域
本发明涉及跟随车技术领域,特别涉及一种无人车智能跟随调度系统。
背景技术
随着科学技术的研究与发展,工业科技的发展也突飞猛进,尤其是自动化智能科技,为人们带来了便捷可靠的现代化生活,如智能跟随的无人小车或机器人,其可以自动跟随目标运动,应用在日常生活、工业生产、军事或农业中时,可以大大降低劳动人员的负担。
现有技术中无人小车的跟随匹配操作复杂,且往返需要人工控制或引导,智能化程度不高,增加了操作人员的工作量;无人小车的目标定位方式主要是采用超声波雷达,通过多个超声波探头对目标进行定位,但超声波定位传播速度慢、探测范围有限,无人车与跟随目标通常是一一对应的,缺乏多无人车与多跟随目标的匹配调度功能,无法实现跟随目标与无人车之间一对多的功能,导致很多场景下无人车的利用效率低。
发明内容
本发明的目的旨在克服现有技术的缺陷,提供一种无人车智能跟随调度系统,能够提高机器人作业的智能化水平,降低操作复杂度,从而降低操作人员的工作量,提高多机器人的协作化水平,提高工作效率。
本发明的上述技术目的是通过以下技术方案得以实现的:一种无人车智能跟随调度系统,包括智能跟随机器人、定位遥控标签、系统定位基站和调度控制系统;
所述定位遥控标签,用于发射定位无线信号,以使所述智能跟随机器人定位和跟随;
所述定位遥控标签,还用于发射无线通信信号,与所述智能跟随机器人和所述调度控制系统通信;
所述系统定位基站,用于接收标签并向所述调度控制系统发送校正数据;
所述定位遥控标签,还用于向所述调度控制系统发送匹配指令;
所述调度控制系统,用于根据接收到的所述匹配指令,指派相应的所述智能跟随机器人按预先设定的安全路线前往所述定位遥控标签所在地点,以使所述智能跟随机器人与所述定位遥控标签进行匹配和跟随;
所述定位遥控标签,还用于向所述调度控制系统发送解除指令;
所述调度控制系统,还用于根据接收到的所述解除指令,解除所述智能跟随机器人与所述定位遥控标签的匹配,并指导所述智能跟随机器人按预先设定的路线返回预定地点。
通过采用上述技术方案,调度控制系统了解所有定位遥控标签和智能跟随机器人的位置及其匹配状态,当调度控制系统接收到定位遥控标签的匹配请求后,指派对应的智能跟随机器人按照预先设定的安全路线前往定位遥控标签的位置并与定位遥控标签进行匹配跟随;调度控制系统在接收到智能跟随机器人或定位遥控标签的遣返请求后,调度控制系统指派对应的机器人返回预定地点。通过调度控制系统,可以自动实现智能跟随机器人的匹配调度,不需要用户手动控制机器人往返,提高了机器人作业的智能化水平,降低了操作人员的工作量。调度控制系统预先存储了机器人的所有可行路径,智能跟随机器人在前往定位遥控标签所在地点或返回预定地点时,调度控制系统能够根据其他智能跟随机器人的位置以及作业场地内的堵塞情况推荐最优路径,指导机器人的行走动作,提高工作效率。
本发明的进一步设置为:所述智能跟随机器人包括移动底盘、IMU模块、无线通信模块、定位模块和机器人控制器,所述定位模块包括车载UWB基站和车载RTK信标;
所述IMU模块,用于记录所述智能跟随机器人移动过程中的速度和加速度信息,以使所述机器人控制器生成并存储所述智能跟随机器人的移动轨迹;
所述无线通信模块,用于发射和接收无线电信号,以使所述智能跟随机器人与所述遥控定位标签以及所述调度控制系统之间通信;
所述定位模块,用于接收所述定位遥控标签发射的无线信号;
所述机器人控制器,用于根据所述定位遥控标签发射的无线信号,确定所述定位遥控标签相对所述智能跟随机器人的位置,并根据测算的所述定位遥控标签的位置和速度,制定转向和行走决策,以使所述智能跟随机器人对所述定位遥控标签进行跟随;
所述定位模块,还用于发射无线电信号,以使所述调度控制系统对所述智能跟随机器人进行定位;
所述无线通信模块,还用于接收所述定位遥控标签发送的控制指令;
所述机器人控制器,还用于根据所述控制指令,控制所述智能跟随机器人完成相应动作。
本发明的进一步设置为:所述移动底盘包括电动履带底盘或轮式底盘。
本发明的进一步设置为:所述电动履带底盘包括履带动力总成、行走电机、驻车装置和作业装置。
本发明的进一步设置为:所述轮式底盘包括车架及悬挂系统、驱动电机、驻车装置和作业装置。
本发明的进一步设置为:所述定位遥控标签包括无线遥控器和UWB定位标签。
本发明的进一步设置为:所述调度控制系统包括调度系统主机和RTK定位基站,所述RTK定位基站用于对所述定位遥控标签和所述智能跟随机器人进行定位,并上传至所述调度系统主机,所述调度系统主机用于与所述定位遥控标签和所述智能跟随机器人进行通信,接收并发送指令。
本发明的有益效果是:
1、通过调度控制系统,可以自动实现智能跟随机器人的匹配调度,不需要用户手动控制机器人往返,提高了机器人作业的智能化水平,降低了操作人员的工作量。调度控制系统预先存储了机器人的所有可行路径,智能跟随机器人在前往定位遥控标签所在地点或返回预定地点时,调度控制系统能够根据其他智能跟随机器人的位置以及作业场地内的堵塞情况推荐最优路径,指导机器人的行走动作,提高工作效率。
2、机器人控制器能根据IMU模块测量的速度和加速度信息计算出智能跟随机器人的历史行走路径,并存储起来,当智能跟随机器人在作业场地内丢失定位信号或失去与调度控制系统的通信时,使智能跟随机器人能够根据历史行走路径原路返回,直至恢复与调度控制系统的通信,确保了智能跟随机器人工作过程的顺利进行。
3、无人车的智能跟随调度既可以通过调度控制系统进行调度匹配,也可以通过无线遥控器进行控制,用户可以根据实际的工作场景选择调度控制方式,选择更加灵活方便,降低操作复杂度,本发明的定位遥控标签采用UWB定位技术实现对被跟随目标的定位,定位范围更大、方向性更好,同时还可以提高多机器人的协作化水平,实现被跟随目标与智能跟随机器人之间一对多的跟随关系,从而大幅提高工作效率,降低人力成本。
4、不同类型底盘的机器人适用的作业场地不一样,因此,用户可以根据实际的作业场地选择相应类型的机器人,灵活方便,提高智能跟随机器人的场地适应性。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
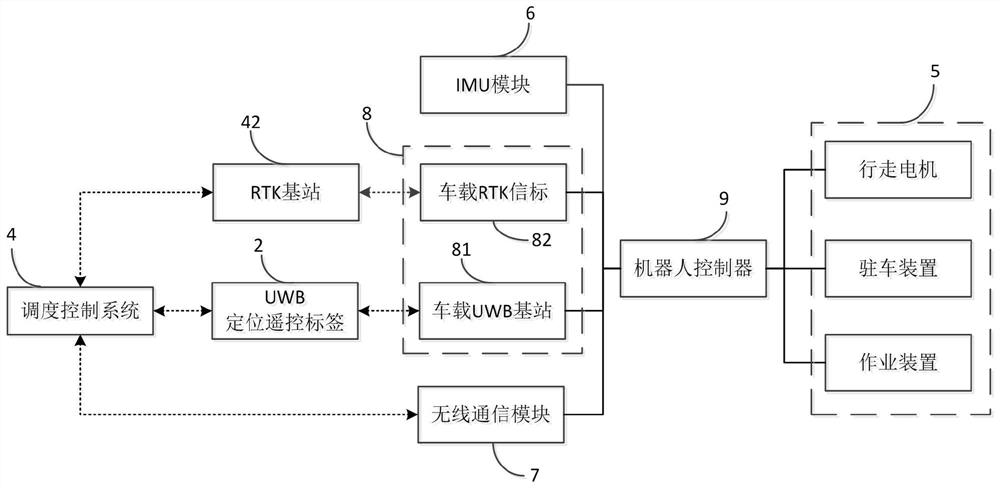
图1是本发明一种无人车智能跟随调度系统的模块示意图;
图2是本发明一种无人车智能跟随调度系统的结构示意图。
图中,1、智能跟随机器人;2、定位遥控标签;3、系统定位基站;4、调度控制系统,41、调度系统主机,42、RTK基站;5、移动底盘;6、IMU模块;7、无线通信模块;8、定位模块,81、车站UWB基站,82、车载RTK信标;9、机器人控制器。
具体实施方式
下面将结合具体实施例对本发明的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
参见图1和图2,一种无人车智能跟随调度系统,包括智能跟随机器人1、定位遥控标签2、系统定位基站3和调度控制系统4,定位遥控标签2用于发射定位无线信号,以使智能跟随机器人1定位和跟随,定位遥控标签2还用于发射无线通信信号,与智能跟随机器人1和调度控制系统4进行通信,系统定位基站3用于接收标签并向调度控制系统4发送校正数据,定位遥控标签2还用于向调度控制系统4发送匹配指令,调度控制系统4用于根据接收到的匹配指令,指派相应的智能跟随机器人1按预先设定的安全路线前往定位遥控标签2所在地点,以使智能跟随机器人1与定位遥控标签2进行匹配和跟随,定位遥控标签2还用于向调度控制系统4发送解除指令,调动控制系统用于根据接收到的解除指令,解除智能跟随机器人1与定位遥控标签2的匹配,并指导智能跟随机器人1按预先设定的路线返回预定地点。
需要说明的是,调度控制系统4了解所有定位遥控标签2和智能跟随机器人1的位置及其匹配状态,调度控制系统4可以与定位遥控标签2通信,当调度控制系统4接收到定位遥控标签2的匹配请求后,指派对应的智能跟随机器人1按照预先设定的安全路线前往定位遥控标签2的位置并与定位遥控标签2进行匹配跟随;调度控制系统4在接收到智能跟随机器人1或定位遥控标签2的遣返请求后,调度控制系统4指派对应的机器人返回预定地点。通过调度控制系统4,可以自动实现智能跟随机器人1的匹配调度,不需要用户手动控制机器人往返,提高了机器人作业的智能化水平,降低了操作人员的工作量。调度控制系统4预先存储了机器人的所有可行路径,智能跟随机器人1在前往定位遥控标签2所在地点或返回预定地点时,调度控制系统4能够根据其他智能跟随机器人1的位置以及作业场地内的堵塞情况推荐最优路径,指导机器人的行走动作,提高工作效率。
系统定位基站3接收标签,并与调度控制系统4共同负责所有智能跟随机器人1和定位遥控标签2的调度控制,调度控制系统4在对智能跟随机器人1和定位遥控标签2进行定位时,存在一定误差,系统定位基站3是一种基准站,通过向调度控制系统4发送校正数据,可以校准卫星误差,从而使得调度控制系统4定位机器人的位置精度达到5cm以内。
参见图1,智能跟随机器人1包括移动底盘5、IMU(Inertial Measurement Unit,惯性测量单元)模块6、无线通信模块7、定位模块8和机器人控制器9,定位模块8包括车载UWB基站81和车载RTK信标82,IMU模块6用于记录智能跟随机器人1移动过程中的速度和加速度信息,以使机器人控制器9生成并存储智能跟随机器人1的移动轨迹;无线通信模块7用于发射和接收无线电信号,以使智能跟随机器人1与遥控定位标签以及调度控制系统4之间通信;定位模块8用于接收定位遥控标签2发射的无线信号;机器人控制器9用于根据定位遥控标签2发射的无线信号,确定定位遥控标签2相对智能跟随机器人1的位置,并根据测算的定位遥控标签2的位置和速度,制定转向和行走决策,以使智能跟随机器人1对定位遥控标签2进行跟随;定位模块8还用于发射无线电信号,以使调度控制系统4对智能跟随机器人1进行定位;无线通信模块7还用于接收定位遥控标签2发送的控制指令;机器人控制器9还用于根据控制指令,控制智能跟随机器人1完成相应动作。
应理解的是,机器人控制器9能根据IMU模块6测量的速度和加速度信息计算出智能跟随机器人1的历史行走路径,并存储起来,当智能跟随机器人1在作业场地内丢失定位信号或失去与调度控制系统4的通信时,使智能跟随机器人1能够根据历史行走路径原路返回,直至恢复与调度控制系统4的通信,确保了智能跟随机器人1工作过程的顺利进行。
具体的,移动底盘5包括电动履带底盘或轮式底盘,电动履带底盘包括履带动力总成、行走电机、驻车装置和作业装置,轮式底盘包括车架及悬挂系统、驱动电机、驻车装置和作业装置。移动底盘5为电动履带底盘的机器人为履带式机器人,这种类型的机器人能更好的适应松软的地形,例如沙地、泥地,履带与地面接触面积大,较平稳;移动底盘5为轮式底盘的机器人为轮式机器人,此种类型的机器人更适合平坦的路面,特别是马路,且能高速移动。不同类型底盘的机器人适用的作业场地不一样,因此,用户可以根据实际的作业场地选择相应类型的机器人,灵活方便,提高智能跟随机器人1的场地适应性。
具体的,定位遥控标签2包括无线遥控器和UWB(UltraWideband,超宽带)定位标签,定位遥控标签2方便人员随身携带,既可以发射定位无线信号,方便智能跟随机器人1定位和跟随,也可以发射通信无线信号,与智能跟随机器人1和调度控制系统4进行通信。操作人员可以通过无线遥控器手动控制智能跟随机器人1的匹配和跟随,智能跟随机器人1的定位模块8包括车载UWB定位基站81,定位遥控标签2发送UWB无线电信号后,机器人控制器9根据车载UWB定位基站81接收的UWB无线电信号,确定定位遥控标签2相对智能跟随机器人1的位置,智能跟随机器人1根据测算的UWB定位标签的位置和速度做出转向和行走的决策,对定位遥控标签2实施跟随。无人车的智能跟随调度既可以通过调度控制系统4进行调度匹配,也可以通过无线遥控器进行控制,用户可以根据实际的工作场景选择调度控制方式,选择更加灵活方便,降低操作复杂度。
本发明的定位遥控标签2采用UWB定位技术实现对被跟随目标的定位,定位范围更大、方向性更好,同时还可以提高多机器人的协作化水平,实现被跟随目标与智能跟随机器人1之间一对多的跟随关系,从而大幅提高工作效率,降低人力成本。
具体的,调度控制系统4包括调度系统主机41和RTK(Real-time kinematic,实时动态载波相位差分技术)定位基站42,RTK定位基站42用于对定位遥控标签2和智能跟随机器人1进行定位,并上传至调度系统主机41,调度系统主机41用于与定位遥控标签2和智能跟随机器人1进行通信,接收并发送指令,智能跟随机器人1的定位模块8还包括车载RTK信标82,便于RTK基站获取智能跟随机器人1的定位并上传给调度系统主机41。
工作原理:本发明提供的无人车智能跟随调度系统有两种调度模式,一种模式是通过调度控制系统4进行调度跟随,定位遥控标签2发出匹配请求后,调度控制系统4指派对应的智能跟随机器人1前往定位遥控标签2的位置与定位遥控标签2进行匹配,智能跟随机器人1在前往定位遥控标签2所在地点时,调度控制系统4根据预先存储的所有可行路径、其他机器人的位置以及作业场地内的实际情况推荐最优的行走路径,指导智能跟随机器人1的行走动作,实现机器人对定位遥控标签2的智能跟随;另一种模式是通过无线遥控器进行调度跟随,用户通过在无线遥控器上进行操作,定位遥控标签2发出UWB无线电信号,车载UWB定位基站81接收到UWB无线电信号后,机器人控制器9根据接收到的UWB无线电信号确定定位遥控标签2相对智能跟随机器人1的位置,并根据测算的位置和速度制定出转向和行走的决策,指导智能机器人行走,对定位遥控标签2实施跟随。
- 一种无人车智能跟随调度系统
- 一种多无人车作业调度方法、系统、电子设备及无人车